
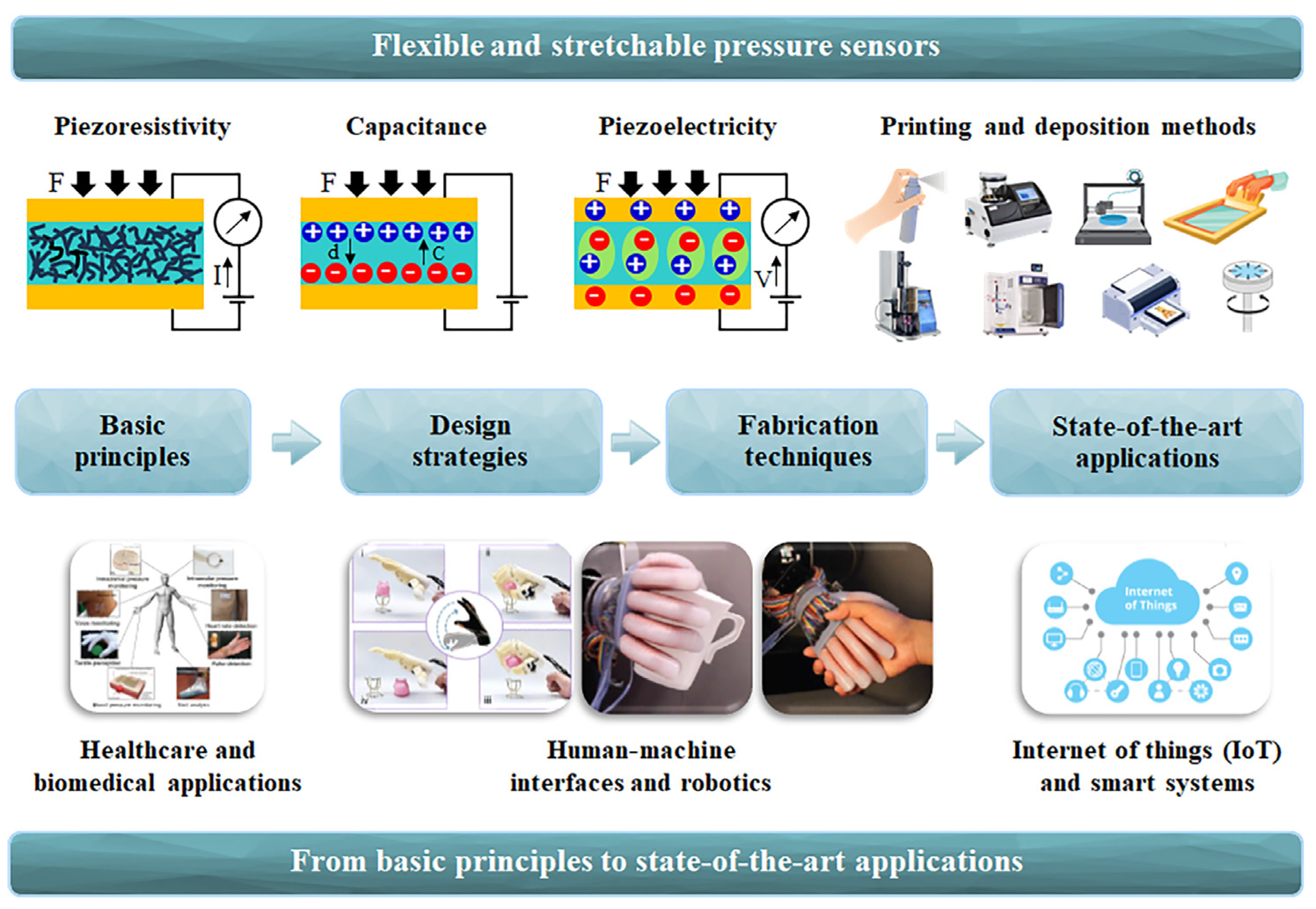
Flexible and Stretchable Pressure Sensors: From Basic Principles to State-of-the-Art Applications


Abstract
:1. Introduction
2. Basic Principles of Flexible and Stretchable Pressure Sensors
2.1. Sensing Mechanisms
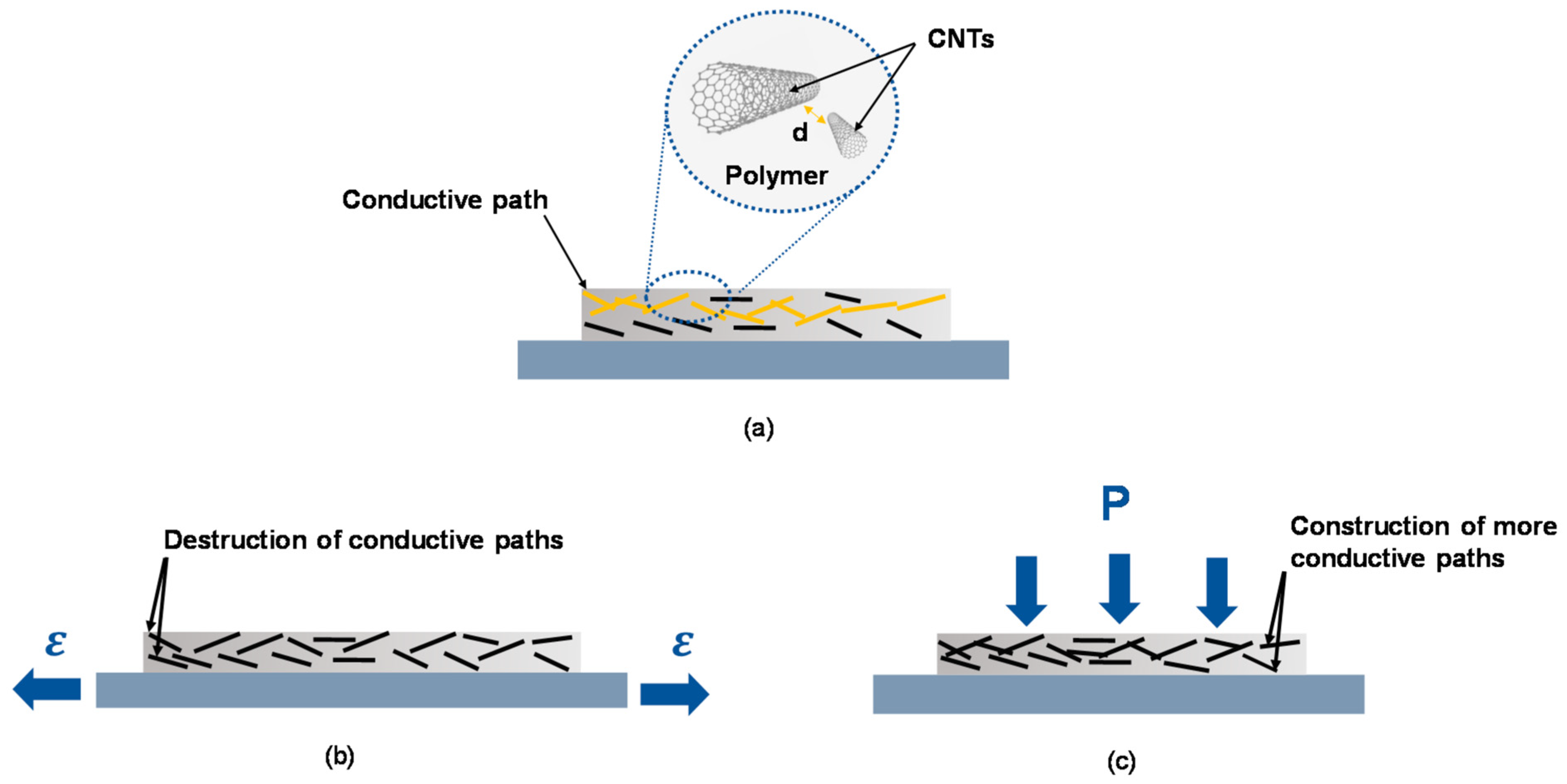
2.1.1. Resistive Sensing
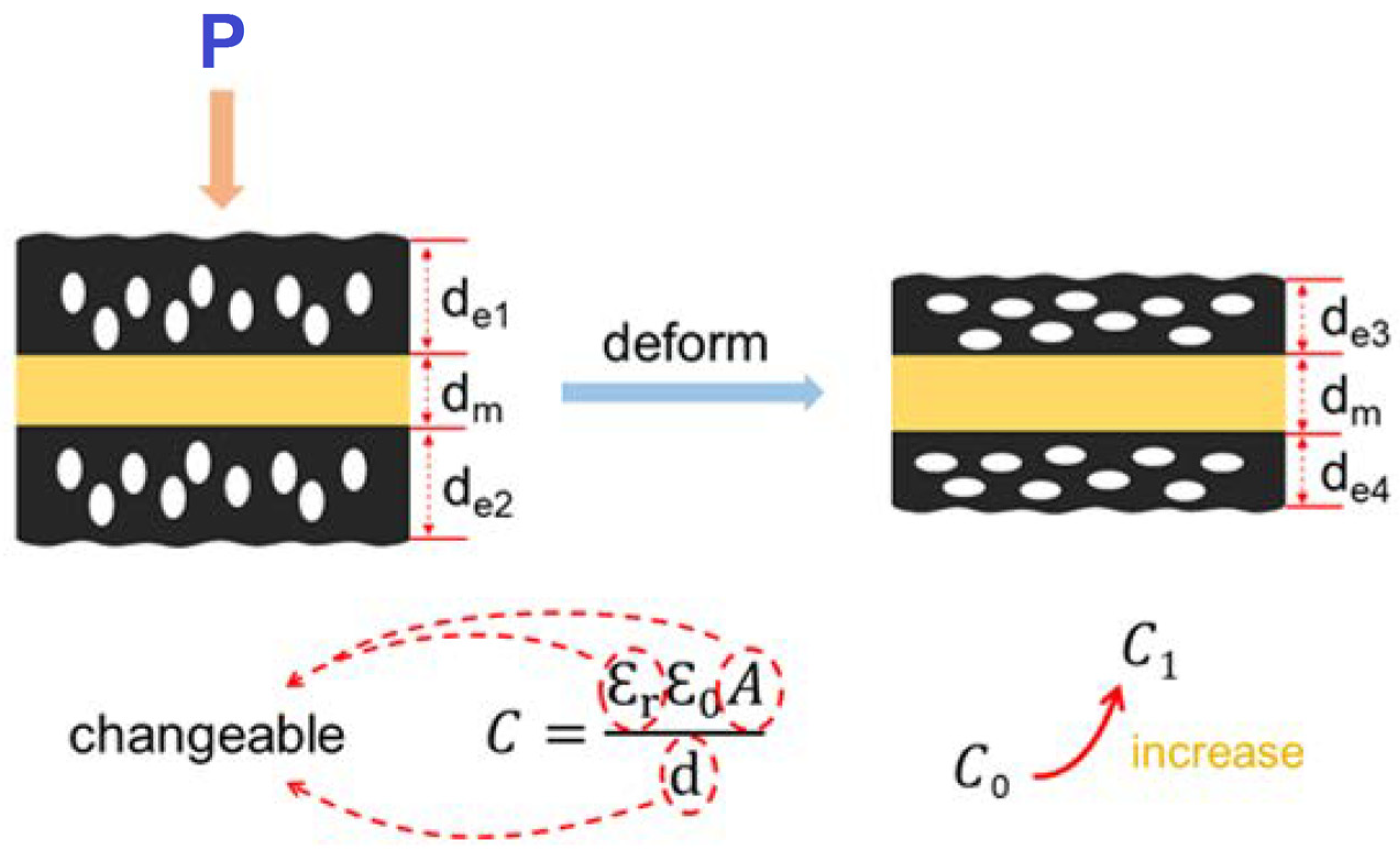
2.1.2. Capacitive Sensing
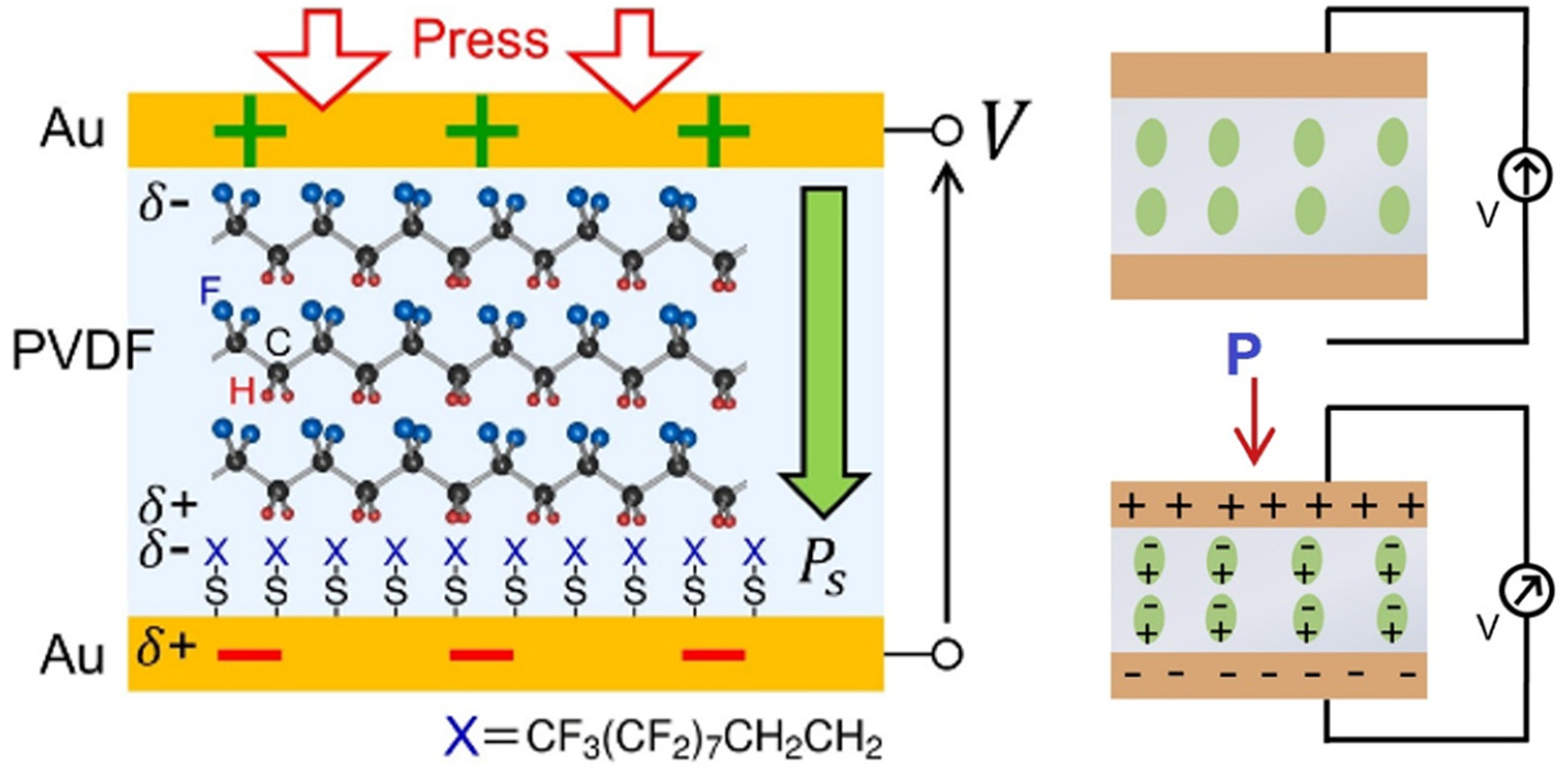
2.1.3. Piezoelectric Sensing
2.2. Sensing Performance Metrics
2.2.1. Sensitivity
2.2.2. Dynamic Range
2.2.3. Linearity
2.2.4. Response Time
2.2.5. Recovery Time
2.2.6. Hysteresis
2.2.7. Drift
2.2.8. Resolution
2.2.9. Cross-Sensitivity
3. Strategies for the Design of Flexible and Stretchable Pressure Sensors
3.1. Material Selection
3.1.1. Elastomers
- Mechanical flexibility and stretchability: Elastomers exhibit high elasticity, allowing them to conform to curved surfaces and withstand stretching and bending during sensor operation [72]. Designers select elastomers with high elongation and low stiffness to ensure that the sensor can withstand mechanical strain and deformation without compromising its functionality or durability.
- Sensitivity and responsiveness: The choice of elastomer impacts the sensor’s sensitivity to pressure variations, with high-sensitivity elastomers translating pressure-induced deformations into measurable signals. Design strategies involve selecting elastomers that exhibit a significant change in their mechanical properties (e.g., modulus, conductivity) in response to pressure [73]. This change can be utilized for accurate pressure detection and measurement.
- Conformability and conformal contact: Elastomers offer excellent conformability, allowing the sensor to adhere and conform to irregular and curved surfaces, including the human body or complex objects [74]. Designers choose elastomers that can maintain conformal contact with the target surface, ensuring reliable and accurate pressure measurements across various application scenarios [75].
- Biocompatibility and skin contact: In applications involving direct contact with the human body, such as healthcare or wearable devices, biocompatibility is crucial [76]. Design strategies focus on selecting elastomers that are biocompatible, hypoallergenic, and safe for prolonged skin contact [77]. They should not cause irritation or adverse reactions.
- Material compatibility and integration: Elastomers must be compatible with other components of the sensor, such as electrodes [78], interconnects, and encapsulation materials, to ensure proper integration and functionality [79]. Design strategies involve considering the compatibility of elastomers with fabrication techniques and processes used in sensor manufacturing, such as printing, molding, or deposition methods.
- Environmental stability: Elastomers should exhibit stability and reliability under environmental conditions encountered during sensor operation, including temperature variations, humidity, and exposure to chemicals or solvents. Designers consider the elastomer’s resistance to environmental factors to ensure long-term stability and performance of the sensor [80].
- Scalability: Design strategies aim to select elastomers that are readily available and compatible with scalable fabrication processes [81]. This ensures the feasibility of mass production and commercialization of flexible and stretchable pressure sensors.
3.1.2. Conductive Materials
- Electrical conductivity: Conductive materials with high electrical conductivity are preferred for the efficient transmission of electrical signals [82]. Design strategies involve selecting materials with low resistivity to ensure accurate sensing of pressure-induced electrical changes.
- Mechanical flexibility and stretchability: Conductive materials should possess mechanical properties that enable them to deform and stretch along with the sensor without compromising electrical conductivity. Materials with high flexibility and stretchability allow the sensor to conform to curved surfaces and undergo mechanical deformation without structural failure [83].
- Compatibility with substrates and integration: Conductive materials should be compatible with the chosen substrate and fabrication techniques for proper integration into the sensor structure [84]. Design strategies involve selecting materials that can be deposited, printed, or patterned onto the substrate using suitable techniques.
- Stability and reliability: Conductive materials should exhibit long-term stability and reliability under various environmental conditions, ensuring the sensor’s durability and consistent performance over time [85].
- Adhesion and interface compatibility: Conductive materials should have good adhesion properties to ensure strong bonding with the substrate and other components of the sensor, minimizing the risk of delamination or detachment during sensor operation [86].
- Scalability: Conductive materials should be readily available to enable the scalability and commercial viability of flexible and stretchable pressure sensors [87].
- Biocompatibility (for biomedical applications): In applications involving direct contact with the human body, conductive materials should be biocompatible to ensure compatibility with biological tissues and minimize the risk of adverse reactions [88].
3.2. Sensor Configurations
3.2.1. Thin Film Sensors
3.2.2. Microstructure Sensors
3.2.3. Textile-Based Sensors
- Integration of nanomaterials: Nanomaterial plays a vital role in the design and fabrication of textile-based sensors. It offers unique properties, such as high surface area and mechanical flexibility, which enhance the functionality of the sensors. Researchers have been exploring various nanomaterials, such as carbon nanotubes, graphene, metallic nanoparticles, 2D materials, and quantum dots incorporated with polymers to impart conductivity and sensing capabilities to textile substrates. The integration of nanomaterials into textiles allows for the creation of highly sensitive, stretchable, and conformable pressure sensors, enabling applications in areas such as smart clothing, medical devices, and sports monitoring.
- Hybrid sensor configurations: A notable trend in textile-based sensors is the emergence of hybrid sensor configurations that combine multiple sensing principles in a single device. For instance, some sensors incorporate both resistive and capacitive sensing elements to provide redundant measurements or improve sensitivity over a broader pressure range. The hybrid approach enables more versatile and multifunctional sensor designs, expanding their potential applications.
- Wearable and flexible electronics: With the increasing popularity of wearable electronics and smart textiles, textile-based pressure sensors have become an integral part of these devices. These sensors can be seamlessly integrated into garments, gloves, socks, and other wearable accessories to monitor body movements, health parameters, and environmental interactions. The trend of textile-based sensors has facilitated the development of wearable electronics with improved comfort and unobtrusiveness.
- Focus on signal processing and data analysis: As the complexity and volume of data generated by textile-based pressure sensors increase, there is a growing focus on signal processing and data analysis techniques. Researchers are exploring innovative algorithms and machine learning approaches to extract meaningful information from sensor data, enabling more accurate and real-time pressure monitoring. This trend enhances the practical utility of textile-based sensors in diverse applications.
- Application diversification: The trend of textile-based sensors is not limited to any specific industry or domain. Instead, these sensors find applications in a wide range of fields, including healthcare, sports and fitness, virtual reality, automotive, and industrial automation. As the technology matures, new applications continue to emerge, demonstrating the versatility and potential of textile-based pressure sensors.
3.3. Integration and Packaging Techniques
3.3.1. Stretchable Electronics
3.3.2. Soft Substrate Integration
3.3.3. Encapsulation and Protection
4. Fabrication Techniques for Flexible and Stretchable Pressure Sensors
4.1. Printing and Deposition Methods
4.1.1. Screen Printing
4.1.2. Inkjet Printing
4.1.3. Aerosol Jet Printing
4.1.4. Magnetron Sputtering
4.1.5. Vacuum Evaporation
4.1.6. Spin Coating
4.1.7. Spraying
4.1.8. Immersion/Dip Coating
4.2. Microfabrication and Patterning
4.2.1. Photolithography
4.2.2. Soft Lithography
4.2.3. Laser Machining
4.3. Assembly and Integration Processes
4.3.1. Transfer Printing
4.3.2. Direct Integration Techniques
5. State-of-the-Art Applications of Flexible and Stretchable Pressure Sensors
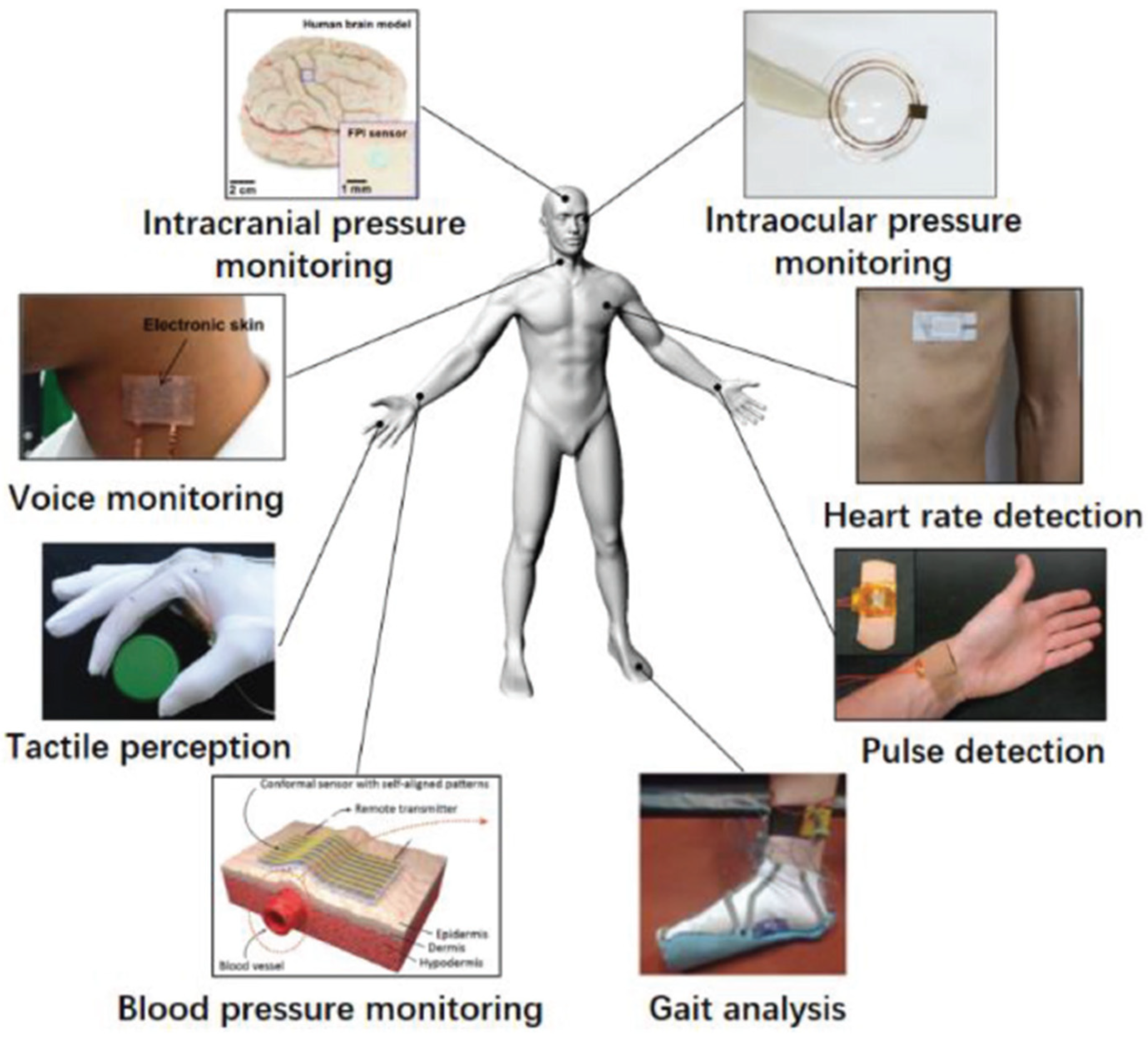
5.1. Healthcare and Biomedical Applications
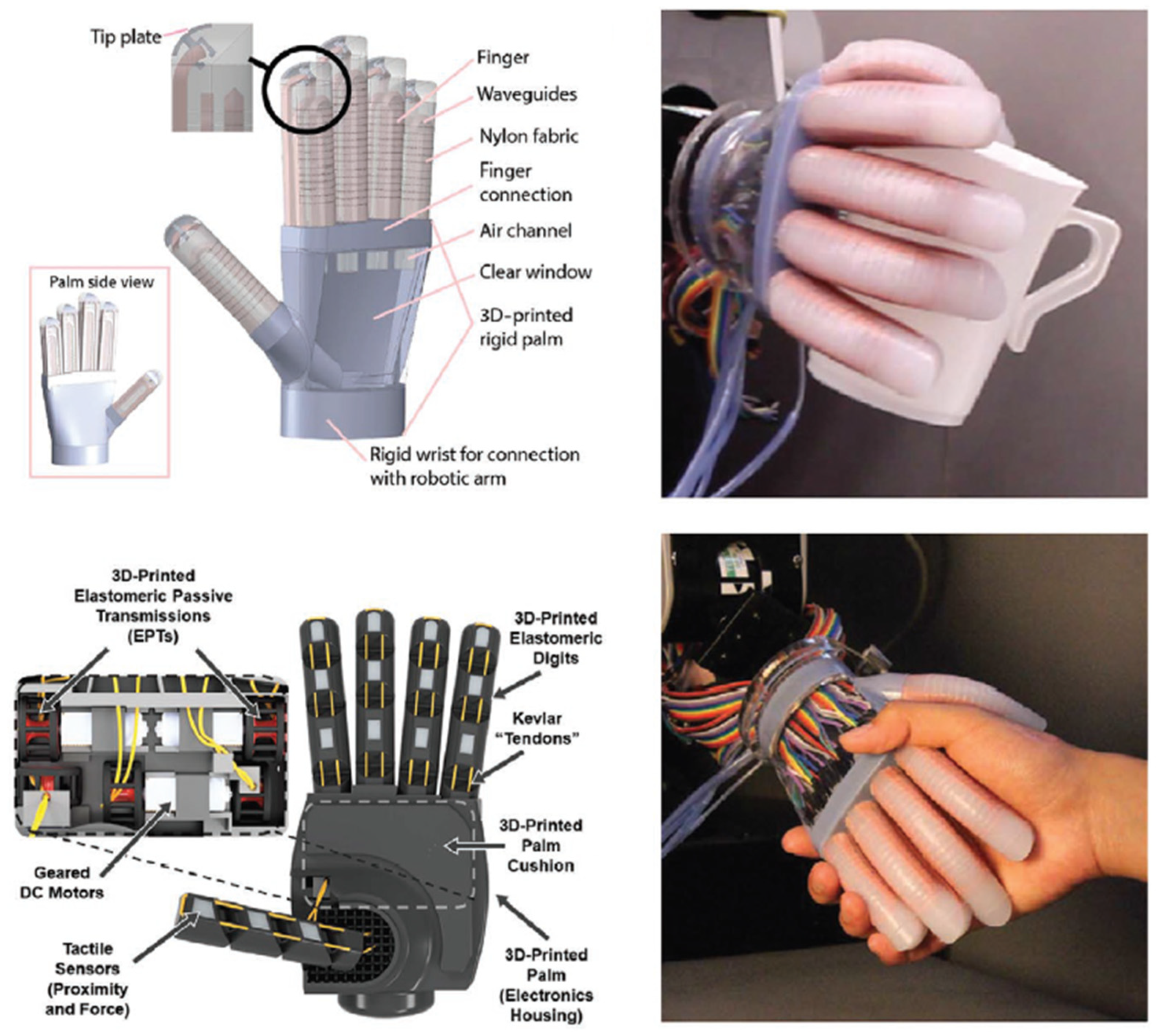
5.2. Human–Machine Interfaces and Robotics
5.3. Internet of Things (IoT) and Smart Systems
6. Challenges and Future Directions
6.1. Performance Improvement
6.2. Durability and Reliability
6.3. Biocompatibility and Safety
6.4. Emerging Trends and Future Applications
7. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hu, J.; Dun, G.; Geng, X.; Chen, J.; Wu, X.M.; Ren, T.L. Recent progress in the flexible micro-pressure sensors for wearable health monitoring. Nanoscale Adv. 2023, 5, 3131–3145. [Google Scholar] [CrossRef] [PubMed]
- Konstantinidis, D.; Iliakis, P.; Tatakis, F.; Thomopoulos, K.; Dimitriadis, K.; Tousoulis, D.; Tsioufis, K. Wearable blood pressure measurement devices and new approaches in hypertension management: The digital era. J. Hum. Hypertens. 2022, 36, 945–951. [Google Scholar] [CrossRef] [PubMed]
- Meng, K.; Xiao, X.; Wei, W.; Chen, G.; Nashalian, A.; Shen, S.; Xiao, X.; Chen, J. Wearable pressure sensors for pulse wave monitoring. Adv. Mater. 2022, 34, e2109357. [Google Scholar] [CrossRef] [PubMed]
- Bernhart, S.; Harbour, E.; Kranzinger, S.; Jensen, U.; Finkenzeller, T. Wearable chest sensor for stride and respiration detection during running. Sports Eng. 2023, 26, 19. [Google Scholar] [CrossRef]
- Chang, X. A wearable electronic based on flexible pressure sensor for running motion monitoring. Discov. Nano 2023, 18, 28. [Google Scholar] [CrossRef] [PubMed]
- Bozali, B.; Ghodrat, S.; Jansen, K.M. Design of wearable finger sensors for rehabilitation applications. Micromachines 2023, 14, 710. [Google Scholar] [CrossRef]
- Lee, K.T.; Chee, P.S.; Lim, E.H.; Kam, Y.H. Development of flexible glove sensors for virtual reality (VR) applications. Mater. Today Proc. 2023. [Google Scholar] [CrossRef]
- Xu, J.; Pan, J.; Cui, T.; Zhang, S.; Yang, Y.; Ren, T.L. Recent progress of tactile and force sensors for human–machine interaction. Sensors 2023, 23, 1868. [Google Scholar] [CrossRef]
- Armitage, L.; Turner, S.; Sreenivasa, M. Human-device interface pressure measurement in prosthetic, orthotic and exoskeleton applications: A systematic review. Med. Eng. Phys. 2021, 97, 56–69. [Google Scholar] [CrossRef]
- Angelucci, A.; Cavicchioli, M.; Cintorrino, I.A.; Lauricella, G.; Rossi, C.; Strati, S.; Aliverti, A. Smart textiles and sensorized garments for physiological monitoring: A review of available solutions and techniques. Sensors 2021, 21, 814. [Google Scholar] [CrossRef]
- Hudec, R.; Matúška, S.; Kamencay, P.; Benco, M. A smart IoT system for detecting the position of a lying person using a novel textile pressure sensor. Sensors 2020, 21, 206. [Google Scholar] [CrossRef] [PubMed]
- Mizumoto, T.; Otoda, Y.; Nakajima, C.; Kohana, M.; Uenishi, M.; Yasumoto, K.; Arakawa, Y. Design and implementation of sensor-embedded chair for continuous sitting posture recognition. IEICE Trans. Inf. Syst. 2020, 103, 1067–1077. [Google Scholar] [CrossRef]
- Takamatsu, S.; Sato, S.; Itoh, T. Urethane-foam-embedded silicon pressure sensors including stress-concentration packaging structure for driver posture monitoring. Sensors 2022, 22, 4495. [Google Scholar] [CrossRef] [PubMed]
- Jena, S.; Gupta, A. Review on pressure sensors: A perspective from mechanical to micro-electro-mechanical systems. Sens. Rev. 2021, 41, 320–329. [Google Scholar] [CrossRef]
- Qin, Z.; Sun, X.; Yu, Q.; Zhang, H.; Wu, X.; Yao, M.; Liu, W.; Yao, F.; Li, J. Carbon nanotubes/hydrophobically associated hydrogels as ultrastretchable, highly sensitive, stable strain, and pressure sensors. ACS Appl. Mater. Interfaces 2020, 12, 4944–4953. [Google Scholar] [CrossRef]
- Seekaew, Y.; Tammanoon, N.; Tuantranont, A.; Lomas, T.; Wisitsoraat, A.; Wongchoosuk, C. Conversion of carbon dioxide into chemical vapor deposited graphene with controllable number of layers via hydrogen plasma pre-treatment. Membranes 2022, 12, 796. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, K.; Feng, G.; Wang, Q.; Fu, P.; Li, F. Preparation of a vertical graphene-based pressure sensor using PECVD at a low temperature. Micromachines 2022, 13, 681. [Google Scholar] [CrossRef]
- Shao, Y.; Zhang, Q.; Zhao, Y.; Pang, X.; Liu, M.; Zhang, D.; Liang, X. Flexible pressure sensor with micro-structure arrays based on PDMS and PEDOT:PSS/PUD&CNTs composite film with 3D printing. Materials 2021, 14, 6499. [Google Scholar]
- Traiwatcharanon, P.; Velmurugan, S.; Zacharias, M.; Wongchoosuk, C. Sparked ZnO nanoparticles-based electrochemical sensor for onsite determination of glyphosate residues. Nanotechnology 2023, 34, 37402361. [Google Scholar] [CrossRef]
- Saengsonachai, A.; Seekaew, Y.; Traiwatcharanon, P.; Wongchoosuk, C. Dual functions of alternating current electroluminescent device for light emission and humidity detection. Nanotechnology 2022, 33, 35767930. [Google Scholar] [CrossRef]
- Traiwatcharanon, P.; Siriwatcharapiboon, W.; Jongprateep, O.; Wongchoosuk, C. Electrochemical paraquat sensor based on lead oxide nanoparticles. RSC Adv. 2022, 12, 16079–16092. [Google Scholar] [CrossRef] [PubMed]
- Kanoun, O.; Bouhamed, A.; Ramalingame, R.; Bautista-Quijano, J.R.; Rajendran, D.; Al-Hamry, A. Review on conductive polymer/CNTs nanocomposites based flexible and stretchable strain and pressure sensors. Sensors 2021, 21, 341. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Yan, X.; Zhu, Y.; Cui, M.; Kong, L.; Kuang, M.; Zhang, X.; Wang, R. A carbon nanotube-based textile pressure sensor with high-temperature resistance. RSC Adv. 2022, 12, 23091–23098. [Google Scholar] [CrossRef] [PubMed]
- Ying, S.; Li, J.; Huang, J.; Zhang, J.H.; Zhang, J.; Jiang, Y.; Sun, X.; Pan, L.; Shi, Y. A flexible piezocapacitive pressure sensor with microsphere-array electrodes. Nanomaterials 2023, 13, 1702. [Google Scholar] [CrossRef] [PubMed]
- Hua, T.; Xiang, Z.; Xia, X.; Li, Z.; Sun, D.; Wu, Y.; Liu, Y.; Shang, J.; Chen, J.; Li, R. A sensitivity-optimized flexible capacitive pressure sensor with cylindrical ladder microstructural dielectric layers. Sensors 2023, 23, 4323. [Google Scholar] [CrossRef]
- Zhao, T.; Zhu, H.; Zhang, H. Rapid prototyping flexible capacitive pressure sensors based on porous electrodes. Biosensors 2023, 13, 546. [Google Scholar] [CrossRef]
- Sun, J.; Luo, B.; Li, H. A review on the conventional capacitors, supercapacitors, and emerging hybrid ion capacitors: Past, present, and future. Adv. Energy Sustain. Res. 2022, 3, 2100191. [Google Scholar] [CrossRef]
- Tadaki, D.; Ma, T.; Yamamiya, S.; Matsumoto, S.; Imai, Y.; Hirano-Iwata, A.; Niwano, M. Piezoelectric PVDF-based sensors with high pressure sensitivity induced by chemical modification of electrode surfaces. Sens. Actuators A Phys. 2020, 316, 112424. [Google Scholar] [CrossRef]
- Arshad, A.N.; Wahid, M.H.M.; Rusop, M.; Majid, W.H.A.; Subban, R.H.Y.; Rozana, M.D. Dielectric and structural properties of poly (vinylidene fluoride)(PVDF) and poly (vinylidene fluoride-trifluoroethylene)(PVDF-TrFE) filled with magnesium oxide nanofillers. J. Nanomater. 2019, 2019, 5961563. [Google Scholar] [CrossRef]
- Qin, S.; Zhang, X.; Yu, Z.; Zhao, F. Polarization study of poly (vinylidene fluoride) films under cyclic electric fields. Polym. Eng. Sci. 2020, 60, 645–656. [Google Scholar] [CrossRef]
- Cui, X.; Huang, F.; Zhang, X.; Song, P.; Zheng, H.; Chevali, V.; Wang, H.; Xu, Z. Flexible pressure sensors via engineering microstructures for wearable human-machine interaction and health monitoring applications. iScience 2022, 25, 104148. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Zeng, J.; Zhang, X.; Guo, G.; Liu, R.; Yan, Z.; Yin, Y. Fatigue resistant aerogel/hydrogel nanostructured hybrid for highly sensitive and ultrabroad pressure sensing. Small 2022, 18, e2104706. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Lin, X.; Mo, D.; Xia, X.; Gong, M.; Lian, H.; Luo, Y. High-sensitivity, fast-response flexible pressure sensor for electronic skin using direct writing printing. RSC Adv. 2020, 10, 26188–26196. [Google Scholar] [CrossRef]
- Guan, X.; Wang, Z.; Zhao, W.; Huang, H.; Wang, S.; Zhang, Q.; Zhong, D.; Lin, W.; Ding, N.; Peng, Z. Flexible piezoresistive sensors with wide-range pressure measurements based on a graded nest-like architecture. ACS Appl. Mater. Interfaces 2020, 12, 26137–26144. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Gao, L.; Wang, Y.; Cao, K.; Hu, X.; Wang, L.; Mu, M.; Liu, M.; Zhang, H.; Wang, W.; et al. Flexible waterproof piezoresistive pressure sensors with wide linear working range based on conductive fabrics. Nanomicro Lett. 2020, 12, 159. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, Y.; Li, Y.; Zhao, Y.; Wang, W.; Li, S.; Huang, L. Flexible piezoresistive sensor with the microarray structure based on self-assembly of multi-walled carbon nanotubes. Sensors 2019, 19, 4985. [Google Scholar] [CrossRef] [PubMed]
- Kannichankandy, D.; Pataniya, P.M.; Narayan, S.; Patel, V.; Sumesh, C.K.; Patel, K.D.; Solanki, G.K.; Pathak, V.M. Flexible piezo-resistive pressure sensor based on conducting PANI on paper substrate. Synth. Met. 2021, 273, 116697. [Google Scholar] [CrossRef]
- Kim, S.W.; Oh, G.Y.; Lee, K.I.; Yang, Y.J.; Ko, J.B.; Kim, Y.W.; Hong, Y.S. A highly sensitive and flexible capacitive pressure sensor based on alignment airgap dielectric. Sensors 2022, 22, 7390. [Google Scholar] [CrossRef]
- Li, W.; Xiong, L.; Pu, Y.; Quan, Y.; Li, S. High-performance paper-based capacitive flexible pressure sensor and its application in human-related measurement. Nanoscale Res. Lett. 2019, 14, 183. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, J.; Hou, X.; Li, G.; Wang, L.; Bai, N.; Cai, M.; Zhao, L.; Wang, Y.; Zhang, J.; et al. Highly stable flexible pressure sensors with a quasi-homogeneous composition and interlinked interfaces. Nat. Commun. 2022, 13, 1317. [Google Scholar] [CrossRef]
- Liu, F.; Dai, S.; Cao, J.; Zhang, Z.; Cheng, G.; Ding, J. CNTs based capacitive stretchable pressure sensor with stable performance. Sens. Actuators A Phys. 2022, 343, 113672. [Google Scholar] [CrossRef]
- Bijender; Kumar, A. One-rupee ultrasensitive wearable flexible low-pressure sensor. ACS Omega 2020, 5, 16944–16950. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Zhang, L.; Wu, T.; Song, H.; Tang, C. Flexible piezoelectric pressure sensor with high sensitivity for electronic skin using near-field electrohydrodynamic direct-writing method. Extrem. Mech. Lett. 2021, 48, 101279. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Li, X.; Lin, Y.; Luo, N.; Long, M.; Zhao, N.; Xu, J.B. Flexible piezoelectric-induced pressure sensors for static measurements based on nanowires/graphene heterostructures. ACS Nano 2017, 11, 4507–4513. [Google Scholar] [CrossRef]
- Zhou, P.; Zheng, Z.; Wang, B.; Guo, Y. Self-powered flexible piezoelectric sensors based on self-assembled 10 nm BaTiO3 nanocubes on glass fiber fabric. Nano Energy 2022, 99, 107400. [Google Scholar] [CrossRef]
- Signore, M.A.; Rescio, G.; De Pascali, C.; Iacovacci, V.; Dario, P.; Leone, A.; Quaranta, F.; Taurino, A.; Siciliano, P.; Francioso, L. Fabrication and characterization of AlN-based flexible piezoelectric pressure sensor integrated into an implantable artificial pancreas. Sci. Rep. 2019, 9, 17130. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Wang, X.; Zeng, C. Flexible, heat-durable, and highly sensitive piezoelectrets from cyclic olefin copolymer with microhoneycomb structure. Micromachines 2023, 14, 829. [Google Scholar] [CrossRef]
- Yang, Y.; Pan, H.; Xie, G.; Jiang, Y.; Chen, C.; Su, Y.; Wang, Y.; Tai, H. Flexible piezoelectric pressure sensor based on polydopamine-modified BaTiO3/PVDF composite film for human motion monitoring. Sens. Actuators A Phys. 2020, 301, 111789. [Google Scholar] [CrossRef]
- Xu, J.; Li, H.; Yin, Y.; Li, X.; Cao, J.; Feng, H.; Bao, W.; Tan, H.; Xiao, F.; Zhu, G. High sensitivity and broad linearity range pressure sensor based on hierarchical in-situ filling porous structure. NPJ Flex. Electron. 2022, 6, 62. [Google Scholar] [CrossRef]
- Duan, Y.; Wu, J.; He, S.; Su, B.; Li, Z.; Wang, Y. Bioinspired spinosum capacitive pressure sensor based on CNT/PDMS nanocomposites for broad range and high sensitivity. Nanomaterials 2022, 12, 3265. [Google Scholar] [CrossRef]
- Luo, Z.; Chen, J.; Zhu, Z.; Li, L.; Su, Y.; Tang, W.; Omisore, O.M.; Wang, L.; Li, H. High-resolution and high-sensitivity flexible capacitive pressure sensors enhanced by a transferable electrode array and a micropillar-PVDF Film. ACS Appl. Mater. Interfaces 2021, 13, 7635–7649. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.H.; Jung, Y.; Jung, K.; Kwak, D.H.; Park, D.M.; Shin, M.G.; Tak, H.J.; Ko, J.S. Hollow polydimethylsiloxane (PDMS) foam with a 3D interconnected network for highly sensitive capacitive pressure sensors. Micro Nano Syst Lett. 2020, 8, 24. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.; Yang, Z.; Jiang, S.; Ju, Z.; Li, Y.; Wang, X.; Wang, D.; Jian, M.; Zhang, Y.; et al. Epidermis microstructure inspired graphene pressure sensor with random distributed spinosum for high sensitivity and large linearity. ACS Nano 2018, 12, 2346–2354. [Google Scholar] [CrossRef] [PubMed]
- Liang, F.C.; Ku, H.J.; Cho, C.J.; Chen, W.C.; Lee, W.Y.; Chen, W.C.; Lee, W.Y.; Chen, W.C.; Rwei, S.P.; Borsali, R.; et al. An intrinsically stretchable and ultrasensitive nanofiber-based resistive pressure sensor for wearable electronics. J. Mater. Chem. C 2020, 8, 5361–5369. [Google Scholar] [CrossRef]
- Seekaew, Y.; Kamlue, S.; Wongchoosuk, C. Room-temperature ammonia gas sensor based on Ti3C2Tx MXene/graphene oxide/CuO/ZnO nanocomposite. ACS Appl. Nano Mater. 2023, 6, 9008–9020. [Google Scholar] [CrossRef]
- Wan, Q.; Chen, Q.; Freithaler, M.A.; Velagala, S.R.; Liu, Y.; To, A.C.; Mahajan, A.; Mukkamala, R.; Xiong, F. Toward real-time blood pressure monitoring via high-fidelity iontronic tonometric sensors with high sensitivity and large dynamic ranges. Adv. Healthc. Mater. 2023, 12, 2202461. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Q.; Yang, L.; Ma, Y.; Huang, H.; He, H.; Ji, H.; Wang, Z.; Qiu, J. Highly sensitive, reliable and flexible pressure sensor based on piezoelectric PVDF hybrid film using MXene nanosheet reinforcement. J. Alloys Compd. 2021, 886, 161069. [Google Scholar] [CrossRef]
- Seekaew, Y.; Wisitsoraat, A.; Wongchoosuk, C. ZnO quantum dots decorated carbon nanotubes-based sensors for methanol detection at room temperature. Diam. Relat. Mater. 2023, 132, 109630. [Google Scholar] [CrossRef]
- Chen, Y.; Li, J.; Hong, Y.; He, W.; Tang, Y.; Zhou, G.; Xu, Z.; He, Y.; Nie, Z.; Zhang, J.; et al. Fabrication and characterization of nano-ZnO/CNTs/PDMS flexible pressure sensor. J. Mater. Sci. Mater. Electron. 2023, 34, 1600. [Google Scholar] [CrossRef]
- Seekaew, Y.; Wisitsoraat, A.; Phokharatkul, D.; Wongchoosuk, C. Room temperature toluene gas sensor based on TiO2 nanoparticles decorated 3D graphene-carbon nanotube nanostructures. Sens. Actuators B Chem. 2019, 279, 69–78. [Google Scholar] [CrossRef]
- Seesaard, T.; Wongchoosuk, C. Fabric-based piezoresistive Ti3AlC2/PEDOT: PSS force sensor for wearable E-textile applications. Org. Electron. 2023, 122, 106894. [Google Scholar] [CrossRef]
- Liang, C.; Sun, J.; Liu, Z.; Tian, G.; Liu, Y.; Zhao, Q.; Yang, D.; Chen, J.; Zhong, B.; Zhu, M.; et al. Wide range strain distributions on the electrode for highly sensitive flexible tactile sensor with low hysteresis. ACS Appl. Mater. Interfaces 2023, 15, 15096–15107. [Google Scholar] [CrossRef] [PubMed]
- Choudhry, N.A.; Shekhar, R.; Khan, I.A.; Rasheed, A.; Padhye, R.; Arnold, L.; Wang, L. Fabrication and characterization of single-layer textile-based flexible pressure sensors for smart wearable electronics applications. Adv. Eng. Mater. 2023, 25, 2201736. [Google Scholar] [CrossRef]
- Fan, B.; Chen, S.; Gao, J.; Guo, X. Accurate recognition of lightweight objects with low resolution pressure sensor array. IEEE Sens. J. 2019, 20, 3280–3284. [Google Scholar] [CrossRef]
- Lee, J.; So, H. 3D-printing-assisted flexible pressure sensor with a concentric circle pattern and high sensitivity for health monitoring. Microsyst. Nanoeng. 2023, 9, 44. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Jin, X.; Han, X.; Li, Y.; Wang, W.; Lin, T.; Zhu, Z. Synergy of porous structure and microstructure in piezoresistive material for high-performance and flexible pressure sensors. ACS Appl. Mater. Interfaces 2021, 13, 19211–19220. [Google Scholar] [CrossRef]
- Zhang, X.; Dang, D.; Su, S.; Wang, Z.; Tong, Z. A highly sensitive flexible capacitive pressure sensor with wide detection range based on bionic gradient microstructures. IEEE Sens. J. 2023, 23, 15413–15423. [Google Scholar] [CrossRef]
- Yin, J.; Guo, S.; E, M.; Liu, H.; Liu, Z.; Ding, W.; Li, D.; Cui, Y. Self-powered rapid response flexible pressure sensor for wearable application. Adv. Eng. Mater. 2023, 25, 2201678. [Google Scholar] [CrossRef]
- He, Y.; Zhou, M.; Mahmoud, M.H.H.; Lu, X.; He, G.; Zhang, L.; Huang, M.; Elnaggar, A.Y.; Lei, Q.; Liu, H.; et al. Multifunctional wearable strain/pressure sensor based on conductive carbon nanotubes/silk nonwoven fabric with high durability and low detection limit. Adv. Compos. Hybrid Mater. 2022, 5, 1939–1950. [Google Scholar] [CrossRef]
- He, Y.; Lu, X.; Wu, D.; Zhou, M.; He, G.; Zhang, J.; Zhang, L.; Liu, H.; Liu, C. CNT/PDMS conductive foam-based piezoresistive sensors with low detection limits, excellent durability, and multifunctional sensing capability. Sens. Actuators A Phys. 2023, 358, 114408. [Google Scholar] [CrossRef]
- Cai, Y.; Liu, L.; Meng, X.; Wang, J.; Zhang, C.; Li, J.; Lu, Z.; Duan, J.A. A broad range and piezoresistive flexible pressure sensor based on carbon nanotube network dip-coated porous elastomer sponge. RSC Adv. 2022, 12, 34117–34125. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, S.; Miao, Y.; Yang, H.; Chen, X.; Xiao, X.; Jiang, Z.; Chen, X.; Nie, B.; Liu, J. Highly stretchable and sensitive pressure sensor array based on icicle-shaped liquid metal film electrodes. ACS Appl. Mater. Interfaces 2020, 12, 27961–27970. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Liu, J.; Lin, S.; Huang, K.; Chen, E.; Huang, K.; Lei, M. New pressure matrix array sensor composed of flexible mechanical sensor elements. Eng. Sci. 2022, 18, 105–112. [Google Scholar] [CrossRef]
- Hu, X.; Wu, M.; Che, L.; Huang, J.; Li, H.; Liu, Z.; Li, M.; Ye, D.; Yang, Z.; Wang, X.; et al. Nanoengineering ultrathin flexible pressure sensor with superior sensitivity and perfect conformability. Small 2023, 19, 2208015. [Google Scholar] [CrossRef]
- Farman, M.; Surendra; Prajesh, R.; Upadhyay, A.K.; Kumar, P.; Thouti, E. All-polydimethylsiloxane-based highly flexible and stable capacitive pressure sensors with engineered interfaces for conformable electronic skin. ACS Appl. Mater. Interfaces 2023, 15, 34195–34205. [Google Scholar] [CrossRef] [PubMed]
- Deswal, S.; Khandelwal, G.; Dahiya, R. Molecular ferroelectric based biocompatible flexible piezoelectric pressure sensor. IEEE Sens. Lett. 2023, 7, 2501704. [Google Scholar] [CrossRef]
- Zhang, Q.; Jia, W.; Ji, C.; Pei, Z.; Jing, Z.; Cheng, Y.; Zhang, K.Z.; Ji, J.; Yuan, Z.; Sang, S. Flexible wide-range capacitive pressure sensor using micropore PE tape as template. Smart Mater. Struct. 2019, 28, 115040. [Google Scholar] [CrossRef]
- Wu, R.; Ma, L.; Balkrishna Patil, A.; Hou, C.; Meng, Z.; Zhang, Y.; Liu, X.; Yu, W. A facile method to prepare a wearable pressure sensor based on fabric electrodes for human motion monitoring. Text. Res. J. 2019, 89, 5144–5152. [Google Scholar] [CrossRef]
- Choi, J.; Kwon, D.; Kim, B.; Kang, K.; Gu, J.; Jo, J.; Na, K.; Ahn, J.; Orbe, D.D.; Kim, K.; et al. Wearable self-powered pressure sensor by integration of piezo-transmittance microporous elastomer with organic solar cell. Nano Energy 2020, 74, 104749. [Google Scholar] [CrossRef]
- Xia, J.; Wang, X.; Zhang, J.; Kong, C.; Huang, W.; Zhang, X. Flexible dual-mechanism pressure sensor based on Ag nanowire electrodes for nondestructive grading and quality monitoring of fruits. ACS Appl. Nano Mater. 2022, 5, 10652–10662. [Google Scholar] [CrossRef]
- Li, W.D.; Pu, J.H.; Zhao, X.; Jia, J.; Ke, K.; Bao, R.Y.; Liu, Z.Y.; Yang, M.B.; Yang, W. Scalable fabrication of flexible piezoresistive pressure sensors based on occluded microstructures for subtle pressure and force waveform detection. J. Mater. Chem. C 2020, 8, 16774–16783. [Google Scholar] [CrossRef]
- Fan, Y.; Zhang, Y.; Wu, J.; Zhao, S.; Guo, J.; Wang, Z.; Chen, M.; Zhang, Q.; Li, Q. Free-standing conductive nickel metal–organic framework nanowires as bifunctional electrodes for wearable pressure sensors and Ni-Zn batteries. iScience 2023, 26, 107397. [Google Scholar] [CrossRef] [PubMed]
- Roy, A.; Manna, K.; Ray, P.G.; Dhara, S.; Pal, S. β-Cyclodextrin-based ultrahigh stretchable, flexible, electro-and pressure-responsive, adhesive, transparent hydrogel as motion sensor. ACS Appl. Mater. Interfaces 2022, 14, 17065–17080. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Palumbo, A.; Hader, G.; Yan, K.; Chang, J.; Wang, H.; Yang, E.H. A flexible pressure sensor with sandwiched carpets of vertically aligned carbon nanotubes partially embedded in polydimethylsiloxane substrates. IEEE Sens. J. 2020, 20, 12146–12153. [Google Scholar] [CrossRef]
- Tang, Y.D.; Wang, P.; Li, G.X.; Wang, G.Y.; Yu, W.; Meng, C.Z.; Guo, S.J. Flexible and ultra-sensitive planar supercapacitive pressure sensor based on porous ionic foam. Adv. Eng. Mater. 2023, 25, 2200814. [Google Scholar] [CrossRef]
- Hou, Y.; Wang, L.; Sun, R.; Zhang, Y.; Gu, M.; Zhu, Y.; Tong, Y.; Liu, X.; Wang, Z.; Xia, J.; et al. Crack-across-pore enabled high-performance flexible pressure sensors for deep neural network enhanced sensing and human action recognition. ACS Nano 2022, 16, 8358–8369. [Google Scholar] [CrossRef]
- Song, Y.; Dong, H.; Liu, W.; Fu, X.; Fu, Z.; Li, P.; Chen, L.; Ahmad, Z.; Liu, J.; Chen, X.; et al. Electrostatic jet engineering of flexible composite pressure sensors for physical applications. ACS Appl. Polym. Mater. 2022, 4, 868–878. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Q.; Zhang, H.; Li, B.; Zang, J.; Zhao, X.; Zhao, X.; Xue, C. A novel MXene-based high-performance flexible pressure sensor for detection of human motion. Smart Mater. Struct. 2023, 32, 065007. [Google Scholar] [CrossRef]
- Su, Y.; Ma, K.; Yuan, F.; Tang, J.; Liu, M.; Zhang, X. High-performance flexible piezoresistive sensor based on Ti3C2Tx MXene with a honeycomb-like structure for human activity monitoring. Micromachines 2022, 13, 821. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, K.; Pei, Z.; Wu, Y.; Sang, S.; Zhang, Q.; Jiao, H. A highly accurate flexible sensor system for human blood pressure and heart rate monitoring based on graphene/sponge. RSC Adv. 2022, 12, 2391–2398. [Google Scholar] [CrossRef]
- Guo, X.; Ma, L.; Wu, W.; Li, S.; Lei, X.; Wu, X.; Yu, X.; Liu, F. Ultra-sensitive flexible piezoresistive pressure sensor prepared by laser-assisted copper template for health monitoring. Sens. Actuators A Phys. 2022, 334, 113325. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, T.; Cao, J.; Wen, H.; Fei, T.; Liu, S.; Wang, R.; Ren, H.; Zhao, H. Flexible piezoresistive sensors based on conducting polymer-coated fabric applied to human physiological signals monitoring. J. Bionic Eng. 2020, 17, 55–63. [Google Scholar] [CrossRef]
- Wei, Y.; Shi, X.; Yao, Z.; Zhi, J.; Hu, L.; Yan, R.; Shi, C.; Yu, H.D.; Huang, W. Fully paper-integrated hydrophobic and air permeable piezoresistive sensors for high-humidity and underwater wearable motion monitoring. NPJ Flex. Electron. 2023, 7, 13. [Google Scholar] [CrossRef]
- Yang, Z.; Duan, Q.; Zang, J.; Zhao, Y.; Zheng, W.; Xiao, R.; Zhang, Z.; Hu, L.; Wu, G.; Nan, X.; et al. Boron nitride-enabled printing of a highly sensitive and flexible iontronic pressure sensing system for spatial mapping. Microsyst. Nanoeng. 2023, 9, 68. [Google Scholar] [CrossRef] [PubMed]
- Pang, X.; Zhang, Q.; Shao, Y.; Liu, M.; Zhang, D.; Zhao, Y. A flexible pressure sensor based on magnetron sputtered MoS2. Sensors 2021, 21, 1130. [Google Scholar] [CrossRef]
- Liu, Z.; Yin, Z.; Wang, J.; Zheng, Q. Polyelectrolyte dielectrics for flexible low-voltage organic thin-film transistors in highly sensitive pressure sensing. Adv. Funct. Mater. 2019, 29, 1806092. [Google Scholar] [CrossRef]
- Wang, X.; Li, H.; Wang, T.; Niu, X.; Wang, Y.; Xu, S.; Jiang, Y.; Chen, L.; Liu, H. Flexible and high-performance piezoresistive strain sensors based on multi-walled carbon nanotubes@ polyurethane foam. RSC Adv. 2022, 12, 14190–14196. [Google Scholar] [CrossRef]
- Yang, M.; Cheng, Y.; Yue, Y.; Chen, Y.; Gao, H.; Li, L.; Cai, B.; Liu, W.; Wang, Z.; Guo, H.; et al. High-performance flexible pressure sensor with a self-healing function for tactile feedback. Adv. Sci. 2022, 9, e2200507. [Google Scholar] [CrossRef]
- Li, T.; Chen, L.; Yang, X.; Chen, X.; Zhang, Z.; Zhao, T.; Li, X.; Zhang, J. A flexible pressure sensor based on an MXene–textile network structure. J. Mater. Chem. C 2019, 7, 1022–1027. [Google Scholar] [CrossRef]
- Cheng, L.; Hao, X.; Liu, G.; Zhang, W.; Cui, J.; Zhang, G.; Yang, Y.; Wang, R. A flexible pressure sensor based on silicon nanomembrane. Biosensors 2023, 13, 131. [Google Scholar] [CrossRef] [PubMed]
- Miller, S.; Bao, Z. Fabrication of flexible pressure sensors with microstructured polydimethylsiloxane dielectrics using the breath figures method. J. Mater. Res. 2015, 30, 3584–3594. [Google Scholar] [CrossRef]
- Tong, Z.; Sun, C.; Ma, Y.; Wang, M.; Jia, S.; Chen, X. Facile fabrication of microstructured surface using laser speckle for high-sensitivity capacitive pressure sensors. Sci. China Technol. Sci. 2023, 66, 155–164. [Google Scholar] [CrossRef]
- Hu, G.; Huang, F.; Tang, C.; Gu, J.; Yu, Z.; Zhao, Y. High-performance flexible piezoresistive pressure sensor printed with 3D microstructures. Nanomaterials 2022, 12, 3417. [Google Scholar] [CrossRef] [PubMed]
- Deng, L.; Deng, W.; Yang, T.; Tian, G.; Jin, L.; Zhang, H.; Lan, B.; Wang, S.; Ao, Y.; Wu, B.; et al. Flexible lead-free piezoelectric Ba0.94Sr0.06Sn0.09Ti0.91O3/PDMS composite for self-powered human motion monitoring. J. Funct. Biomater. 2023, 14, 37. [Google Scholar] [CrossRef] [PubMed]
- Peng, Y.; Zhou, J.; Song, X.; Pang, K.; Samy, A.; Hao, Z.; Wang, J. A flexible pressure sensor with ink printed porous graphene for continuous cardiovascular status monitoring. Sensors 2021, 21, 485. [Google Scholar] [CrossRef]
- Li, L.; Zheng, J.; Chen, J.; Luo, Z.; Su, Y.; Tang, W.; Gao, X.; Li, Y.; Cao, C.; Liu, Q.; et al. Flexible pressure sensors for biomedical applications: From ex vivo to in vivo. Adv. Mater. Interfaces 2020, 7, 2000743. [Google Scholar] [CrossRef]
- Zhong, M.; Zhang, L.; Liu, X.; Zhou, Y.; Zhang, M.; Wang, Y.; Yang, L.; Wei, D. Wide linear range and highly sensitive flexible pressure sensor based on multistage sensing process for health monitoring and human-machine interfaces. Chem. Eng. J. 2021, 412, 128649. [Google Scholar] [CrossRef]
- Zou, Q.; Zhou, S.; Su, Q.I.; Xue, T. Flexible pressure and temperature dual-modality sensor based on stretchable electrode for human–machine interaction. J. Micromech. Microeng. 2023, 33, 045005. [Google Scholar] [CrossRef]
- Li, J.; Liu, J.; Chen, M.; Yan, K.; Gu, W.; Bao, L.; Xia, Q. Flexible sensors for hand rehabilitation training system. In Proceedings of the International Conference on Mechanism and Machine Science, Yantai, China, 5–8 August 2022; pp. 2217–2232. [Google Scholar]
- Pei, Z.; Zhang, Q.; Yang, K.; Yuan, Z.; Zhang, W.; Sang, S. A fully 3D-printed wearable piezoresistive strain and tactile sensing array for robot hand. Adv. Mater. Technol. 2021, 6, 2100038. [Google Scholar] [CrossRef]
- Li, L.; Yu, S.; Sun, W. Design of flexible pressure sensor applied to mechanical gripper. IEEE Sens. J. 2022, 22, 15793–15801. [Google Scholar] [CrossRef]
- Ramadoss, T.S.; Ishii, Y.; Chinnappan, A.; Ang, M.H.; Ramakrishna, S. Fabrication of pressure sensor using electrospinning method for robotic tactile sensing application. Nanomaterials 2021, 11, 1320. [Google Scholar] [CrossRef] [PubMed]
- Huang, L.; Wang, H.; Zhan, D.; Fang, F. Flexible capacitive pressure sensor based on laser–induced graphene and polydimethylsiloxane foam. IEEE Sens. J. 2021, 21, 12048–12056. [Google Scholar] [CrossRef]
- Gupta, N.; Adepu, V.; Tathacharya, M.; Siraj, S.; Pal, S.; Sahatiya, P.; Kuila, B.K. Piezoresistive pressure sensor based on conjugated polymer framework for pedometer and smart tactile glove applications. Sens. Actuators A Phys. 2023, 350, 114139. [Google Scholar] [CrossRef]
- Oh, D.; Seo, J.; Kim, H.G.; Ryu, C.; Bang, S.W.; Park, S.; Kim, H.J. Multi-height micropyramids based pressure sensor with tunable sensing properties for robotics and step tracking applications. Micro Nano Syst. Lett. 2022, 10, 7. [Google Scholar] [CrossRef]
- Lin, Q.; Huang, J.; Yang, J.; Huang, Y.; Zhang, Y.; Wang, Y.; Zhang, J.; Wang, Y.; Yuan, L.; Cai, M.; et al. Highly sensitive flexible iontronic pressure sensor for fingertip pulse monitoring. Adv. Healthc. Mater. 2020, 9, 2001023. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, D.; Li, Z.; Du, C.; Yang, Y.; Zhang, B.; Zhao, W. Waterproof flexible pressure sensors based on electrostatic self-assembled MXene/NH2-CNTs for motion monitoring and electronic skin. ACS Appl. Mater. Interfaces 2023, 15, 32569–32579. [Google Scholar] [CrossRef]
- Heng, W.; Solomon, S.; Gao, W. Flexible electronics and devices as human–machine interfaces for medical robotics. Adv. Mater. 2022, 34, 2107902. [Google Scholar] [CrossRef]
- Lian, Y.; Yu, H.; Wang, M.; Yang, X.; Zhang, H. Ultrasensitive wearable pressure sensors based on silver nanowire-coated fabrics. Nanoscale Res. Lett. 2020, 15, 70. [Google Scholar] [CrossRef]
- Tan, Y.; Ivanov, K.; Mei, Z.; Li, H.; Li, H.; Lubich, L.; Wang, C.; Wang, L. A soft wearable and fully-textile piezoresistive sensor for plantar pressure capturing. Micromachines 2021, 12, 110. [Google Scholar] [CrossRef]
- Gao, Y.; Yan, C.; Huang, H.; Yang, T.; Tian, G.; Xiong, D.; Chen, N.; Chu, X.; Zhong, S.; Deng, W.; et al. Microchannel-confined MXene based flexible piezoresistive multifunctional micro-force sensor. Adv. Funct. Mater. 2020, 30, 1909603. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, D.; Wang, D.; Tang, M.; Zhang, H.; Chen, X.; Mao, R.; Ma, Y.; Cai, H. High sensitivity, wide range pressure sensor based on layer-by-layer self-assembled MXene/Carbon black@ Polyurethane sponge for human motion monitoring and intelligent vehicle control. IEEE Sens. J. 2022, 22, 21561–21568. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, X.; Hou, N.; Huang, S.; Yuan, T.; Wang, H.; Zhang, A.; Li, L.; Li, X.; Zhang, W. Ultra-thin self-powered sensor integration system with multiple charging modes in smart home applications. Mater. Today Nano 2023, 23, 100358. [Google Scholar] [CrossRef]
- Yang, C.; Hu, J.; Wu, S.; Pan, M.; Li, P.; Du, Q.; Peng, J.; Qiu, W.; Hu, Y.; Zhang, Q.; et al. An ultrahighly pressure sensitive electronic fish skin for underwater wave sensing. ACS Appl. Mater. Interfaces 2023, 15, 20421–20434. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Gao, S.; Zhu, J.; Li, J.; Xu, H.; Xu, K.; Cheng, H.; Huang, X. Multifunctional stretchable sensors for continuous monitoring of long-term leaf physiology and microclimate. ACS Omega 2019, 4, 9522–9530. [Google Scholar] [CrossRef] [PubMed]
- Barriga, A.; Barriga, J.A.; Moñino, M.J.; Clemente, P.J. IoT-based expert system for fault detection in Japanese Plum leaf-turgor pressure WSN. Internet Things 2023, 23, 100829. [Google Scholar] [CrossRef]
- Barzegar, M.; Blanks, S.; Gharehdash, S.; Timms, W. Development of IOT-based low-cost MEMS pressure sensor for groundwater level monitoring. Meas. Sci. Technol. 2023, 34, 115103. [Google Scholar] [CrossRef]
- Yu, T.; Tao, Y.; Wu, Y.; Zhang, D.; Yang, J.; Ge, G. Heterogeneous multi-material flexible piezoresistive sensor with high sensitivity and wide measurement range. Micromachines 2023, 14, 716. [Google Scholar] [CrossRef]
- Xue, B.; Xie, H.; Zhao, J.; Zheng, J.; Xu, C. Flexible piezoresistive pressure sensor based on electrospun rough polyurethane nanofibers film for human motion monitoring. Nanomaterials 2022, 12, 723. [Google Scholar] [CrossRef]
- Tao, L.Q.; Zhang, K.N.; Tian, H.; Liu, Y.; Wang, D.Y.; Chen, Y.Q.; Yang, Y.; Ren, T.L. Graphene-paper pressure sensor for detecting human motions. ACS Nano 2017, 11, 8790–8795. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zhang, S.; Wang, C.; Zhou, Q.; Zhang, H.; Pan, G.B. Highly sensitive capacitive flexible pressure sensor based on a high-permittivity MXene nanocomposite and 3D network electrode for wearable electronics. ACS Sens. 2021, 6, 2630–2641. [Google Scholar] [CrossRef]
- Zhao, K.; Han, J.; Ma, Y.; Tong, Z.; Suhr, J.; Wang, M.; Xiao, L.; Jia, S.; Chen, X. Highly sensitive and flexible capacitive pressure sensors based on vertical graphene and micro-pyramidal dielectric layer. Nanomaterials 2023, 13, 701. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Chen, T. A flexible ultra-highly sensitive capacitive pressure sensor for basketball motion monitoring. Discov. Nano. 2023, 18, 17. [Google Scholar] [CrossRef] [PubMed]
- Cui, H.; Liu, Y.; Tang, R.; Ren, J.; Yao, L.; Cai, Y.; Chen, D. A sensitive and flexible capacitive pressure sensor based on a porous hollow hemisphere dielectric layer. Micromachines 2023, 14, 662. [Google Scholar] [CrossRef] [PubMed]
- Kim, K.L.; Cho, S.H.; Lee, J.B.; Kim, G.; Lee, K.; Lee, S.W.; Kang, H.S.; Park, C.; Ahn, J.H.; Shim, W.; et al. Transparent and flexible graphene pressure sensor with self-assembled topological crystalline ionic gel. ACS Appl. Mater. Interfaces 2023, 15, 19319–19329. [Google Scholar] [CrossRef] [PubMed]
- Feng, Z.; He, Q.; Wang, X.; Lin, Y.; Qiu, J.; Wu, Y.; Yang, J. Capacitive sensors with hybrid dielectric structures and high sensitivity over a wide pressure range for monitoring biosignals. ACS Appl. Mater. Interfaces 2023, 15, 6217–6227. [Google Scholar] [CrossRef] [PubMed]
- Sengupta, D.; Lu, L.; Gomes, D.R.; Jayawardhana, B.; Pei, Y.; Kottapalli, A.G.P. Fabric-like electrospun PVAc-graphene nanofiber webs as wearable and degradable piezocapacitive sensors. ACS Appl. Mater. Interfaces 2023, 15, 22351–22366. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Tan, Z.; Zhang, Q.; Shen, Y.; Mao, X.; Wei, L.; Sun, R.; Zhou, F.; Liu, C. Flexible self-powered friction piezoelectric sensor based on structured PVDF-based composite nanofiber membranes. ACS Appl. Mater. Interfaces 2023, 15, 30849–30858. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Yin, J.; Wee, M.G.V.; Chinnappan, A.; Ramakrishna, S. A self-powered piezoelectric nanofibrous membrane as wearable tactile sensor for human body motion monitoring and recognition. Adv. Fiber Mater. 2023, 5, 1417–1430. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Liu, F.; Yin, A.; Qi, X.; Liu, J.; Ren, Z.; Zhou, S.; Wang, Y.; Ye, Y.; Ma, Q.; et al. Highly sensitive, wide-pressure and low-frequency characterized pressure sensor based on piezoresistive-piezoelectric coupling effects in porous wood. Carbohydr. Polym. 2023, 315, 120983. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Wu, D.; Chen, Z.; Wang, Z.; Cao, C.; Shao, X.; Zhou, G.; Zhang, S.; Wang, L.; Sun, D. A flexible pressure sensor with highly customizable sensitivity and linearity via positive design of microhierarchical structures with a hyperelastic model. Microsyst. Nanoeng. 2023, 9, 5. [Google Scholar] [CrossRef]
- Hwang, T.; Seo, J.; Ko, E.; Yang, C.; Lee, H.S. Synergistic control of engineered nanostructures toward sensitivity and reliability of a flexible piezoresistive pressure sensor. Mater. Adv. 2023, 4, 1326–1334. [Google Scholar] [CrossRef]
- Du, D.; Ma, X.; An, W.; Yu, S. Flexible piezoresistive pressure sensor based on wrinkled layers with fast response for wearable applications. Measurement 2022, 201, 111645. [Google Scholar] [CrossRef]
- Wang, M.; Yu, Y.; Liang, Y.; Han, Z.; Liu, C.; Ma, S.; Lin, Z.; Ren, L. High-performance multilayer flexible piezoresistive pressure sensor with bionic hierarchical and anisotropic structure. J. Bionic Eng. 2022, 19, 1439–1448. [Google Scholar] [CrossRef]
- Xie, C.; Zhang, M.; Du, W.; Zhou, C.; Xiao, Y.; Zhang, S.; Chan, M. Sensing-range-tunable pressure sensors realized by self-patterned-spacer design and vertical CNT arrays embedded in PDMS. RSC Adv. 2020, 10, 33558–33565. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; He, J.; Liao, Y.; Zeng, X.; Qiu, N.; Liang, Y.; Xiao, P.; Chen, T. A self-protective, reproducible textile sensor with high performance towards human–machine interactions. J. Mater. Chem. A 2019, 7, 26631–26640. [Google Scholar] [CrossRef]
- Sun, X.; Sun, J.; Zheng, S.; Wang, C.; Tan, W.; Zhang, J.; Liu, C.; Liu, C.; Li, T.; Qi, Z.; et al. A sensitive piezoresistive tactile sensor combining two microstructures. Nanomaterials 2019, 9, 779. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, H.; Wu, H.; Ma, S.; Ren, L.; Liang, Y.; Liu, C.; Han, Z. Bioinspired flexible piezoresistive sensor for high-sensitivity detection of broad pressure range. Bio-Des. Manuf. 2023, 6, 243–254. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, R.; Hao, X.; Liu, G. Design of flexible pressure sensor based on conical microstructure PDMS-bilayer graphene. Sensors 2021, 21, 289. [Google Scholar] [CrossRef]
- Chen, S.; Bai, C.; Zhang, C.; Geng, D.; Liu, R.; Xie, Y.; Zhou, W. Flexible piezoresistive three-dimensional force sensor based on interlocked structures. Sens. Actuators A Phys. 2021, 330, 112857. [Google Scholar] [CrossRef]
- Liu, X.; Yu, L.; Zhu, Z.; Nie, Y.; Skov, A.L. Silicone-ionic liquid elastomer composite with keratin as reinforcing agent utilized as pressure sensor. Macromol. Rapid Commun. 2021, 42, e2000602. [Google Scholar] [CrossRef]
- Hesam Mahmoudinezhad, M.; Anderson, I.; Rosset, S. Interdigitated sensor based on a silicone foam for subtle robotic manipulation. Macromol. Rapid Commun. 2021, 42, e2000560. [Google Scholar] [CrossRef] [PubMed]
- Zheng, W.; Xu, H.; Wang, M.; Duan, Q.; Yuan, Y.; Wang, W.; Gao, L. On-skin flexible pressure sensor with high sensitivity for portable pulse monitoring. Micromachines 2022, 13, 1390. [Google Scholar] [CrossRef] [PubMed]
- Ai, Y.; Hsu, T.H.; Wu, D.C.; Lee, L.; Chen, J.H.; Chen, Y.Z.; Wu, S.C.; Wu, C.; Wang, Z.M.; Chueh, Y.L. An ultrasensitive flexible pressure sensor for multimodal wearable electronic skins based on large-scale polystyrene ball@ reduced graphene-oxide core–shell nanoparticles. J. Mater. Chem. C 2018, 6, 5514–5520. [Google Scholar] [CrossRef]
- Wang, F.X.; Zhang, S.H.; Wang, L.J.; Zhang, Y.L.; Lin, J.; Zhang, X.H.; Chen, T.; Lai, Y.K.; Pan, G.B.; Sun, L.N. An ultrahighly sensitive and repeatable flexible pressure sensor based on PVDF/PU/MWCNT hierarchical framework-structured aerogels for monitoring human activities. J. Mater. Chem. C 2018, 6, 12575–12583. [Google Scholar] [CrossRef]
- Ali, M.; Hoseyni, S.M.; Das, R.; Awais, M.; Basdogan, I.; Beker, L. A flexible and biodegradable piezoelectric-based wearable sensor for non-invasive monitoring of dynamic human motions and physiological signals. Adv. Mater. Technol. 2023, 8, 2300347. [Google Scholar] [CrossRef]
- You, Z.; Wei, L.; Zhang, M.; Yang, F.; Wang, X. Hermetic and bioresorbable packaging materials for MEMS implantable pressure sensors: A Review. IEEE Sens. J. 2022, 22, 23633–23648. [Google Scholar] [CrossRef]
- Deng, H.T.; Wen, D.L.; Liu, J.R.; Zhang, X.R.; Wang, Y.L.; Huang, P.; Kim, B.; Zhang, X.S. Stretchable multifunctional sensor based on porous silver nanowire/silicone rubber conductive film. Nano Res. 2023, 16, 7618–7626. [Google Scholar] [CrossRef]
- Rong, L.; Zhao, W.; Fan, Y.; Zhou, Z.; Zhan, M.; He, X.; Yuan, W.; Qian, C. Environmentally stable, stretchable, adhesive, and conductive organohydrogels with multiple dynamic interactions as high-performance strain and temperature sensors. ACS Appl. Mater. Interfaces 2022, 14, 55075–55087. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, A.H.; Jafarizadeh, B.; Baboukani, A.R.; Pala, N.; Wang, C. Monitoring and analysis of cardiovascular pulse waveforms using flexible capacitive and piezoresistive pressure sensors and machine learning perspective. Biosens. Bioelectron. 2023, 237, 115449. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Li, H.; Li, Y.; Wei, X.; Gao, S.; Yue, W.; Zhang, C.; Yin, F.; Zhao, S.; Kim, N.Y.; et al. Wearable hybrid device capable of interactive perception with pressure sensing and visualization. Adv. Funct. Mater. 2022, 32, 2203585. [Google Scholar] [CrossRef]
- Nguyen, T.H.; Ngo, B.V.; Nguyen, T.N.; Vu, C.C. Flexible pressure sensors and machine learning algorithms for human walking phase monitoring. Micromachines 2023, 14, 1411. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Li, B.; Chen, B.; Zhang, J.; Li, Y. 3D printed graphene/polyurethane wearable pressure sensor for motion fitness monitoring. Nanotechnology 2021, 32, 395503. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensing Mechanisms | Sensor Properties | Advantages | Disadvantages | Year [Reference] |
|---|---|---|---|---|
| Piezoresistive | Sensitivity |
|
| 2022 [32] 2020 [33] |
| Range of measurement |
|
| 2020 [34] | |
| Mechanical durability |
|
| 2020 [35] | |
| Fabrication complexity |
|
| 2019 [36] | |
| Power consumption |
|
| 2021 [37] | |
| Capacitive | Sensitivity |
|
| 2022 [38] |
| Range of measurement |
|
| 2019 [39] | |
| Mechanical durability |
|
| 2022 [40] | |
| Fabrication complexity |
|
| 2022 [41] | |
| Power consumption |
|
| 2020 [42] | |
| Piezoelectric | Sensitivity |
|
| 2021 [43] |
| Range of measurement |
|
| 2017 [44] | |
| Mechanical durability |
|
| 2022 [45] | |
| Fabrication complexity |
|
| 2019 [46] | |
| Power consumption |
|
| 2023 [47] |
| Sensing Performance Metrics | Piezoresistive | Capacitive | Piezoelectric |
|---|---|---|---|
| Sensitivity | Moderate to high | Good for small variations | High for precision |
| Dynamic range | Broad coverage | Broad coverage | Broad coverage |
| Linearity | Generally good | Generally good | Generally good |
| Response time | Fast | Fast | Fast |
| Recovery time | Quick | Quick | Quick |
| Hysteresis | Occasional | May occur | Possible |
| Drift | Possible over time | Typical minimal | Minimal over time |
| Resolution | High | High | High |
| Cross-sensitivity | Low compared to others | Possible due to environmental factors | Possible due to external factors |
| Sensor Configurations | Configuration | Working Principle | Advantages | Limitations | Year [Reference] |
|---|---|---|---|---|---|
| Thin film sensors | Thin film layer of sensing material on a flexible substrate. |
|
|
| 2022 [89] |
| Microstructure sensors | Microscale or nanoscale structures (micro-pillars, microchannels, nanowires) for pressure-induced deformations. |
|
|
| 2022 [90] 2022 [91] |
| Textile-based sensors | Textile-based sensors integrate directly into textiles. Sensors can be woven, embroidered, printed, or attached onto fabrics, seamlessly integrating with clothing. |
|
|
| 2020 [92] 2023 [93] |
| Fabrication Techniques | Advantages | Limitations | Year [Reference] |
| Printing and deposition methods | |||
| Screen printing |
|
| 2023 [94] |
| Inkjet printing |
|
| 2022 [89] |
| Aerosol jet printing |
|
| 2022 [90] |
| Magnetron sputtering |
|
| 2021 [95] |
| Vacuum evaporation |
|
| 2019 [96] |
| Spin coating |
|
| 2022 [97] |
| Spraying |
|
| 2022 [98] |
| Immersion/dip coating |
|
| 2021 [37] 2019 [99] |
| Microfabrication and patterning | |||
| Photolithography |
|
| 2023 [100] |
| Soft lithography |
|
| 2015 [101] |
| Laser machining |
|
| 2022 [91] 2023 [102] |
| Assembly and integration processes | |||
| Transfer printing |
|
| 2022 [103] |
| Direct integration Techniques |
|
| 2020 [92] 2023 [93] |
| Sensing Mechanisms | Material | Substrate | Sensitivity | Response/ Recovery Time | Year [Reference] |
|---|---|---|---|---|---|
| Healthcare and biomedical applications | |||||
| Piezoresistive | CNT/PDMS CCF | CPCs | 5.1 kPa−1 (<15 kPa) 1.88 kPa−1 (15–50 kPa) 0.16 kPa−1 (>50 kPa) | 54/65 ms | 2023 [70] |
| Piezoresistive | Graphene/SWNTs | Tissue paper | 12.6 kPa−1 (0–0.6 kPa) 4.3 kPa−1 (0.6–60.4 kPa) | 214/380 ms | 2023 [93] |
| Piezoresistive | GF/PDMS | PI | 0.695 kPa−1 (0–14,122 kPa) | 83/166 ms | 2023 [128] |
| Piezoresistive | CNTs/SNWF composite | Fabric | GF = 8 (0–5 Strain (%)) | 55/40 ms | 2022 [69] |
| Piezoresistive | Ti3C2Tx MXene | PET | 0.61 kPa−1 | 160 ms | 2022 [89] |
| Piezoresistive | Graphene/melamine | Sponge | 0.186 kPa−1 (<5 kPa) | 255/182 ms | 2022 [90] |
| Piezoresistive | CNTs | Copper | 1150.9 kPa−1 (<50 Pa) | 43/15 ms | 2022 [91] |
| Piezoresistive | PU/Ag | PDMS | 10.53 kPa−1 (0–5 kPa) 0.97 kPa−1 (6–15 kPa) | 60/30 ms | 2022 [129] |
| Piezoresistive | Porous graphene (PG) | PI | 53.99 MPa−1 (0.3–1000 kPa) | - | 2021 [105] |
| Piezoresistive | PPy-Cotton | Cotton pads | 4.48 kPa−1 | 220/240 ms | 2020 [92] |
| Piezoresistive | rGO | Tissue paper | 0.1 kPa−1 (2–20 kPa) | 120/60 ms | 2017 [130] |
| Capacitive | Electrode: Gold Dielectric: Nanofiber PVDF nonwoven fabrics | PDMS | 1.807 kPa−1 | 48/72 ms | 2023 [24] |
| Capacitive | Electrode: LIG Dielectric: PI paper | TPU film | 0.0771 kPa−1 (0–9.6 kPa) | 83/108 ms | 2023 [26] |
| Capacitive | Electrode: Silver Thermoplastic polyether urethane (TPU)–ionic liquid (ILD)-h-BN (Ionic film) | PET | 261.4 kPa−1 (0.05–450 kPa) | 15/23 ms | 2023 [94] |
| Capacitive | Dielectric: MXene/TPU | Silicon | 10.2 kPa−1 (0–8.6 kPa) 3.65 kPa−1 (8.6–100 kPa) | 41/39 ms | 2021 [131] |
| Capacitive | Electrode: VG Dielectric: PDMS | PDMS | 6.04 kPa−1 (0–1 kPa) 0.69 kPa−1 (1–10 kPa) | 115/122 ms | 2023 [132] |
| Capacitive | Dielectric: PVDF Nylon textile and polyvinylidene fluoride | Nylon textile | 33.5 kPa−1 | 27/52 ms | 2023 [133] |
| Capacitive | Electrode: CNT/PDMS Dielectric: PDMS | - | 0.18 kPa−1 | 52/56 ms | 2023 [134] |
| Capacitive | Electrode: Graphene/PET Dielectric: P(VDF-TrFE-CFE) [EMI] [TFSA] | - | 10.14 kPa−1 (20 kPa) | <30/23 ms | 2023 [135] |
| Capacitive | Dielectric: MWCNT/PDMS | - | 2.155 kPa−1 (0–500 kPa) | 90/248 ms | 2023 [136] |
| Capacitive | Graphene−PVAc nanofibers | Aluminum foil | 0.014 kPa−1 (2.73–56.06 kPa) 0.006 kPa−1 (75.76–318.18 kPa) | 400/460 ms | 2023 [137] |
| Piezoelectric | Ba0.94Sr0.06Sn0.09Ti0.91O3/PDMS Composite | 21.09 mV⋅kPa−1 | - | 2023 [104] | |
| Piezoelectric | PVDF/MXene-PVDF/ZnO (PM/PZ) nanofiber membranes | PU film | DL-PMPZ, I-PMPZ, CS-PM/PZ, and CS-PZ/PM sensors (0.626, 0.518, 0.628 and 0.751 V/N, respectively) | - | 2023 [138] |
| Piezoelectric | BTO@PVDF piezoelectric | - | 116 mV kPa−1 (0–10 N) 6.6 mV kPa−1 (10–100 N) | 82.7 ms | 2023 [139] |
| Piezoresistive, Piezoelectric | Porous wood (PW) and NaOH/Na2SO3 (H2O2) | - | 0.443 V kPa−1 (0.06–0.6 kPa) | 160/240 ms | 2023 [140] |
| Human–machine interfaces and robotics applications | |||||
| Piezoresistive | MWCNT/PDMS | PDMS | 0.7, 1.0, 1.3 kPa−1 (0–200 kPa) | 12.5/37.5 ms | 2023 [141] |
| Piezoresistive | AAO-PUA (bhAAO) | PUA | 0.0275, 0.0653 kPa−1 (0.2 kPa) | 352.3/177.2 ms | 2023 [142] |
| Piezoresistive | PDMS/MWCNTs | PET | 0.172 kPa−1 | 98.2/111.4 ms | 2022 [128] |
| Piezoresistive | AgNWs/PDMS | PDMS | 2.588 kPa−1 | 10/20 ms | 2022 [143] |
| Piezoresistive | Au-PDMS | Au-PDMS | 2.54 kPa−1 | 30/40 ms | 2022 [144] |
| Piezoresistive | CNT/PDMS | PEN | 50 kPa−1 | 24/32 ms | 2020 [145] |
| Piezoresistive | CNT/PPy-PDA-PFDS | Textile | 101.6, 147.4 kPa−1 | 80/60 ms | 2019 [146] |
| Piezoresistive | MWCNTs/CB/PDMS | Silicon | 3.2 kPa−1 | 217/81 ms | 2019 [147] |
| Piezoresistive | Ag-PDMS | m-PDMS | 2.525 kPa−1 (312 kPa) | 45/70 ms | 2023 [148] |
| Piezoresistive | PDMS/Bilayer graphene | PDMS | 0.122 ± 0.002 kPa−1 (0–5 kPa) 0.077 ± 0.002 kPa−1 (5–20 kPa) | 70 ms | 2021 [149] |
| Piezoresistive | Graphene/PEO | Silicone | 6.33 kPa−1 | 59/22 ms | 2021 [150] |
| Piezoresistive | PDMS/IL/Keratin | Copper | 0.037 kPa−1 (0–10 kPa) | 8/11 ms | 2020 [151] |
| Capacitive | Electrode: Carbon black Dielectric: Silicone | PU foam | 0.047 N−1 (0.78 air volume fraction) | 35 ± 5 ms | 2021 [152] |
| Piezoelectric | Atactic polystyrene (aPS) | PET | dapp = 12.9 ± 1.8 pC N−1 Young modulus = 47.7 kPa | - | 2021 [112] |
| Internet of things (IoT) and smart systems applications | |||||
| Piezoresistive | MoS2 | PDMS | 866.89 MPa−1 (0.46 MPa) | - | 2021 [97] |
| Piezoresistive | Reduced graphene oxide (rGO) | Cotton fabric | 3.96 kPa−1 (0–36 kPa) | 170 ms | 2021 [120] |
| Piezoresistive | AgNWs, Copper electrodes | Cotton fabrics | 3.24 × 105 kPa−1 (0–10 kPa) 2.16 × 104 kPa−1 (10–100 kPa) | 32/24 ms | 2020 [119] |
| Piezoresistive | MXene | PET | 99.5 kPa−1 | 4/13 ms | 2020 [121] |
| Capacitive | Electrode: Conductive silicone rubber Dielectric: PDMS | - | 0.12 kPa−1 | 21/36 ms | 2023 [25] |
| Capacitive | Electrode: Cu MXene/HrGO hybrid film | PDMS | ∼173,688 kPa−1 | 12/25 ms | 2023 [124] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Seesaard, T.; Wongchoosuk, C. Flexible and Stretchable Pressure Sensors: From Basic Principles to State-of-the-Art Applications. Micromachines 2023, 14, 1638. https://doi.org/10.3390/mi14081638
Seesaard T, Wongchoosuk C. Flexible and Stretchable Pressure Sensors: From Basic Principles to State-of-the-Art Applications. Micromachines. 2023; 14(8):1638. https://doi.org/10.3390/mi14081638
Chicago/Turabian StyleSeesaard, Thara, and Chatchawal Wongchoosuk. 2023. "Flexible and Stretchable Pressure Sensors: From Basic Principles to State-of-the-Art Applications" Micromachines 14, no. 8: 1638. https://doi.org/10.3390/mi14081638