
Combined Temperature Compensation Method for Closed-Loop Microelectromechanical System Capacitive Accelerometer
 and
and
Abstract
:1. Introduction
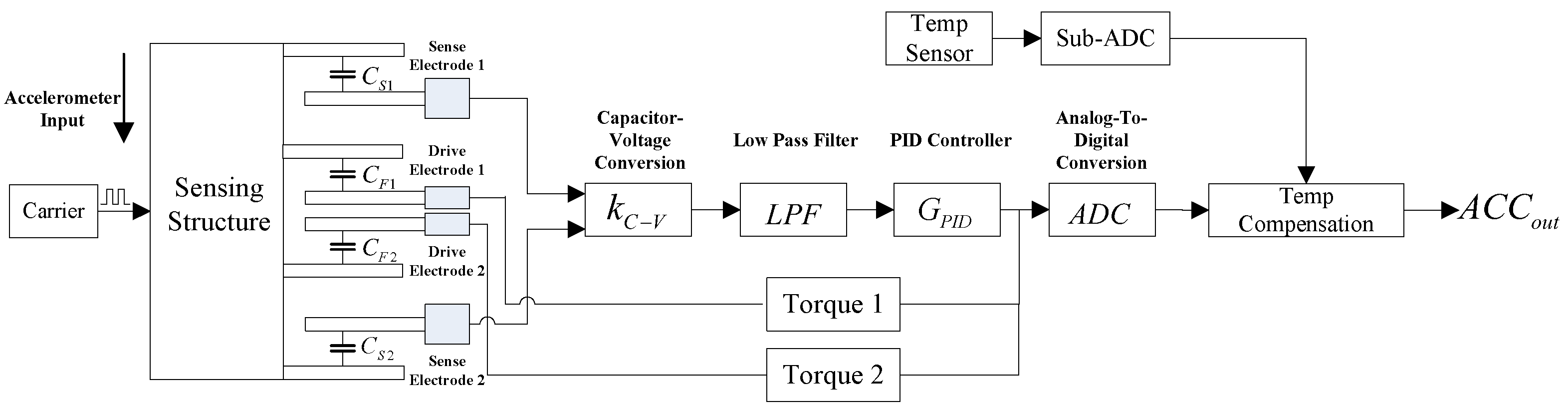
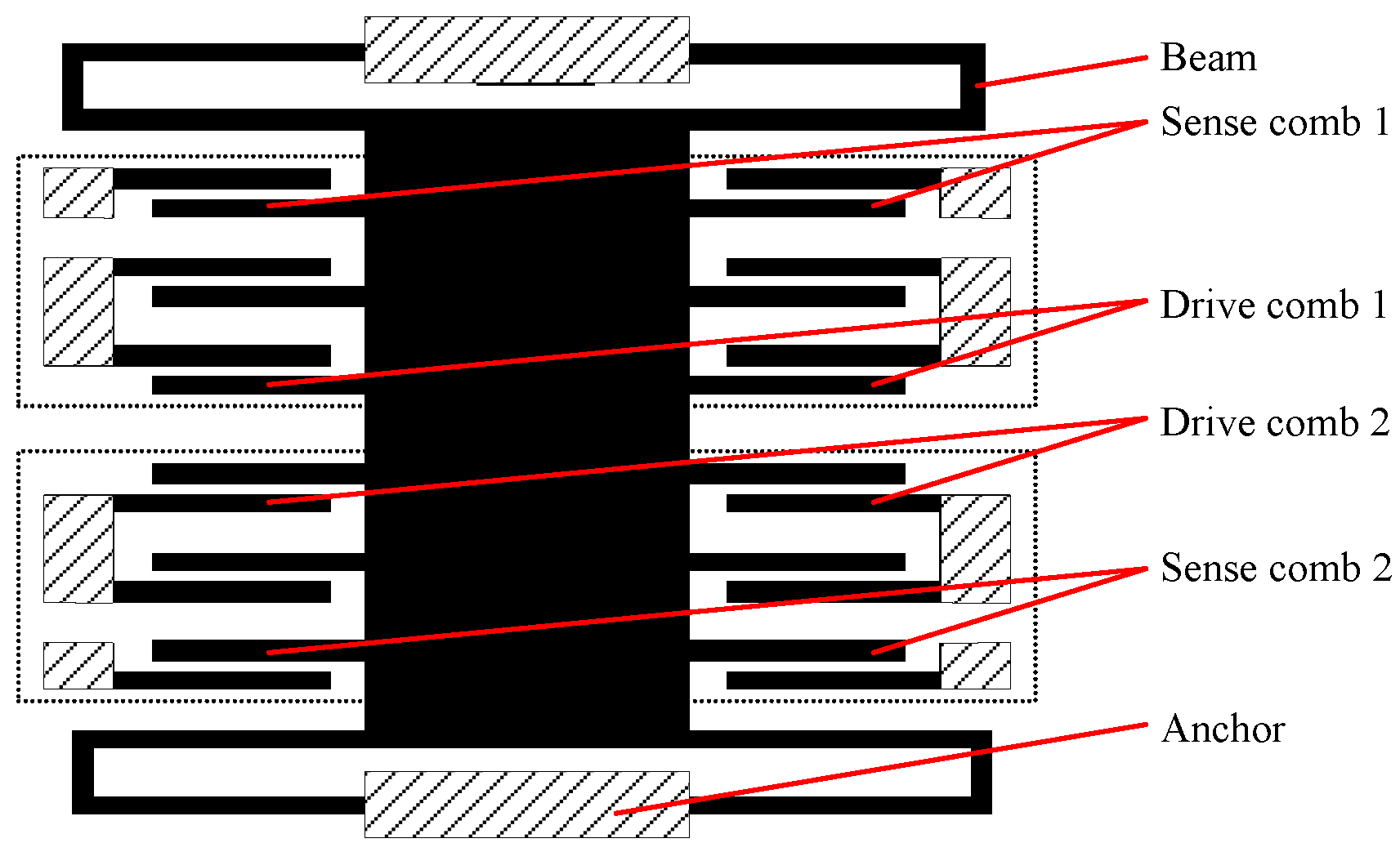
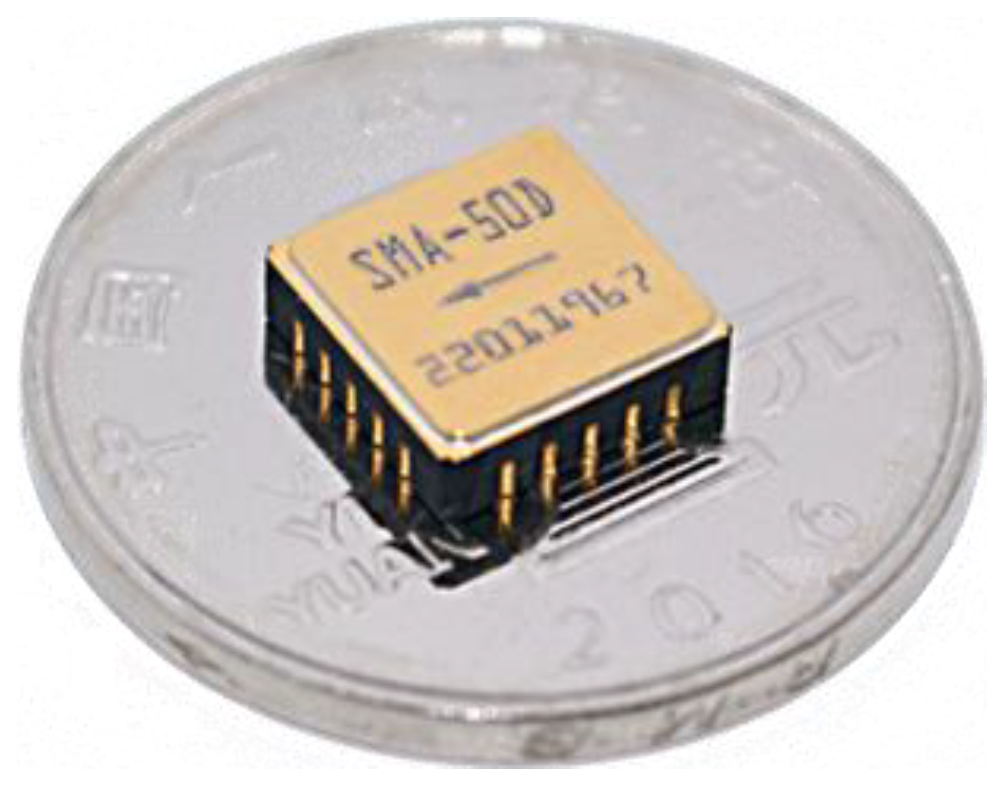
2. MEMS Accelerometer Composition
3. MEMS Accelerometer Principle
4. Temperature Compensation Method
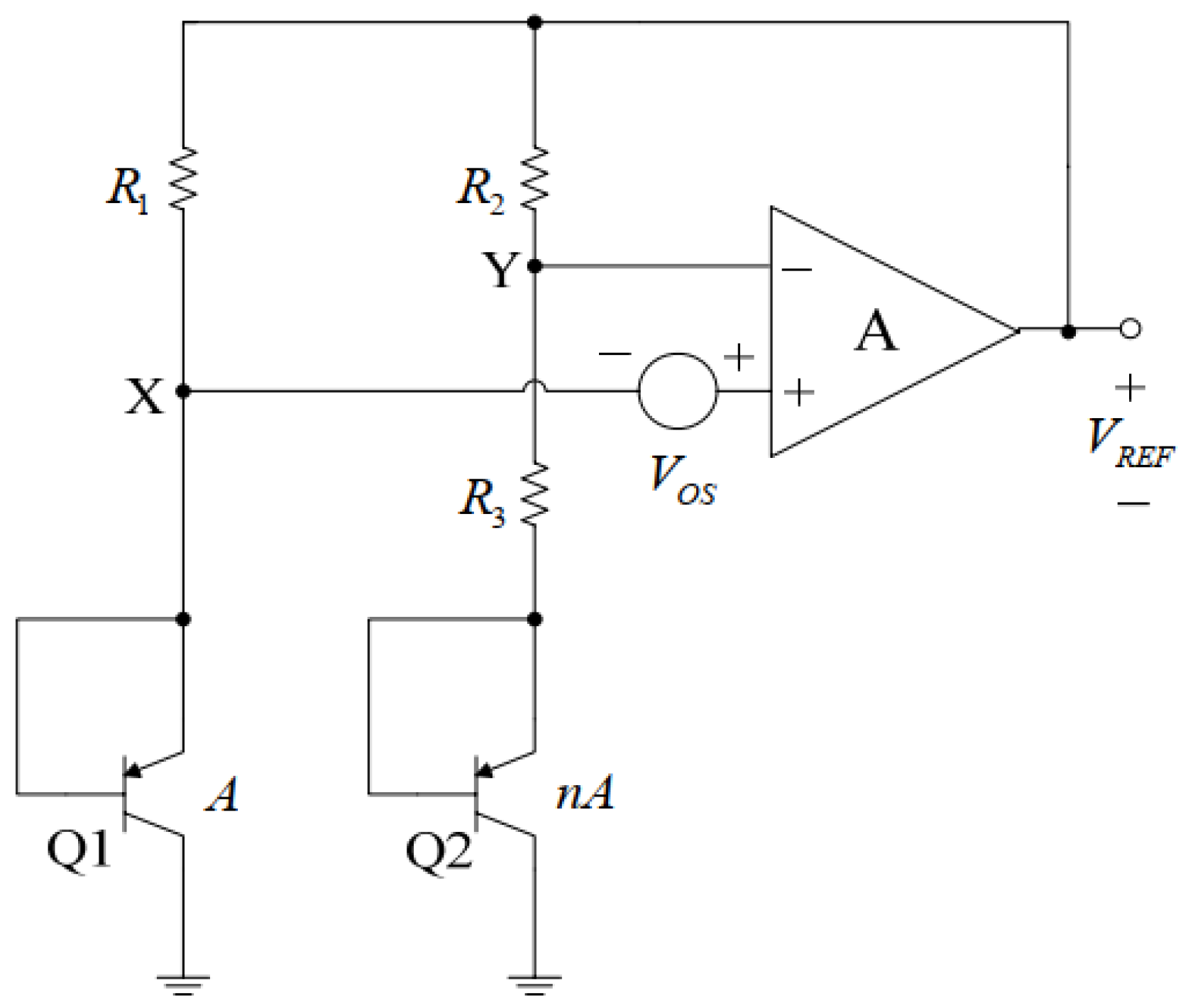
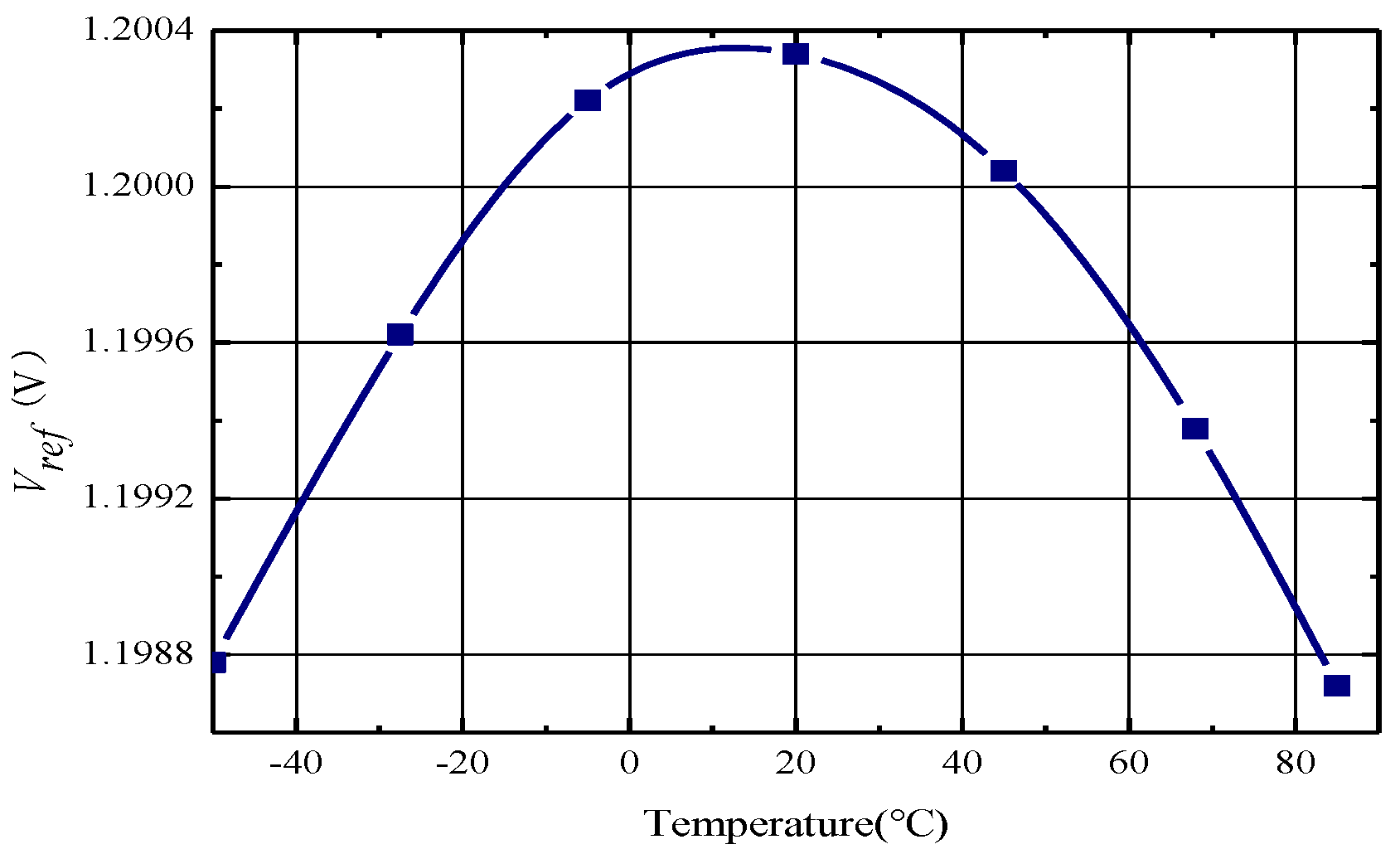
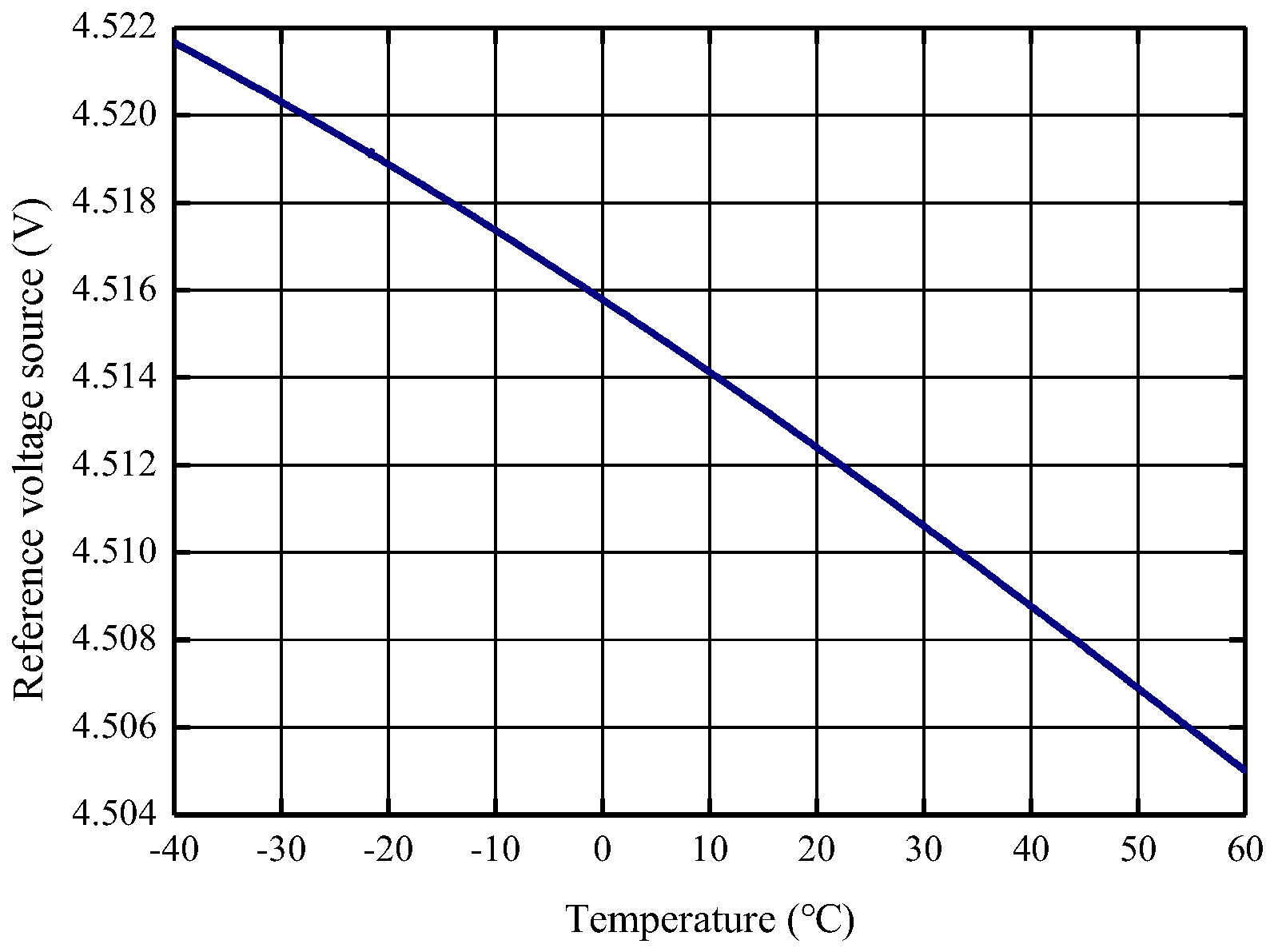
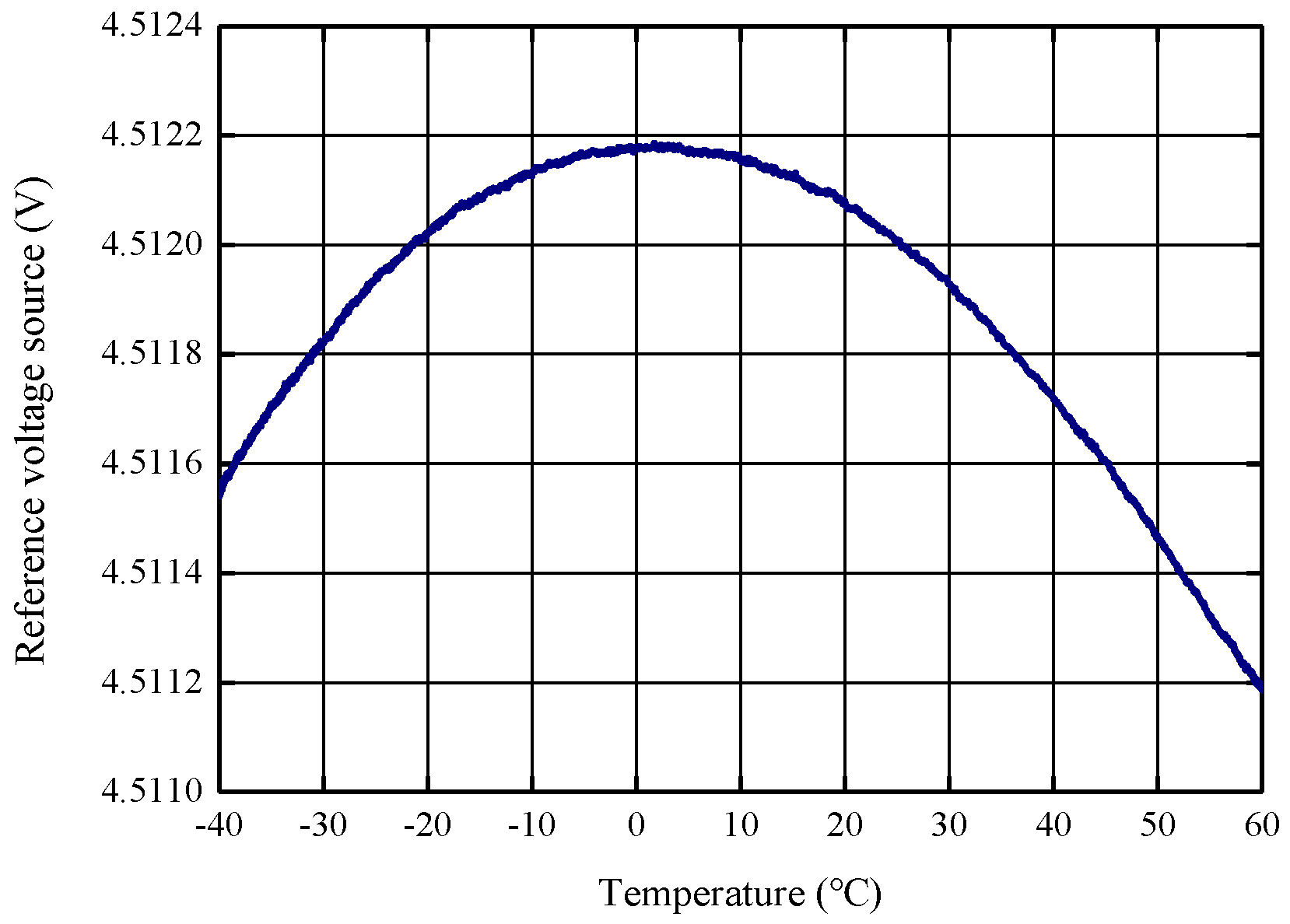
4.1. Reference Voltage Source Compensation
4.2. Accelerometer Terminal Temperature Compensation
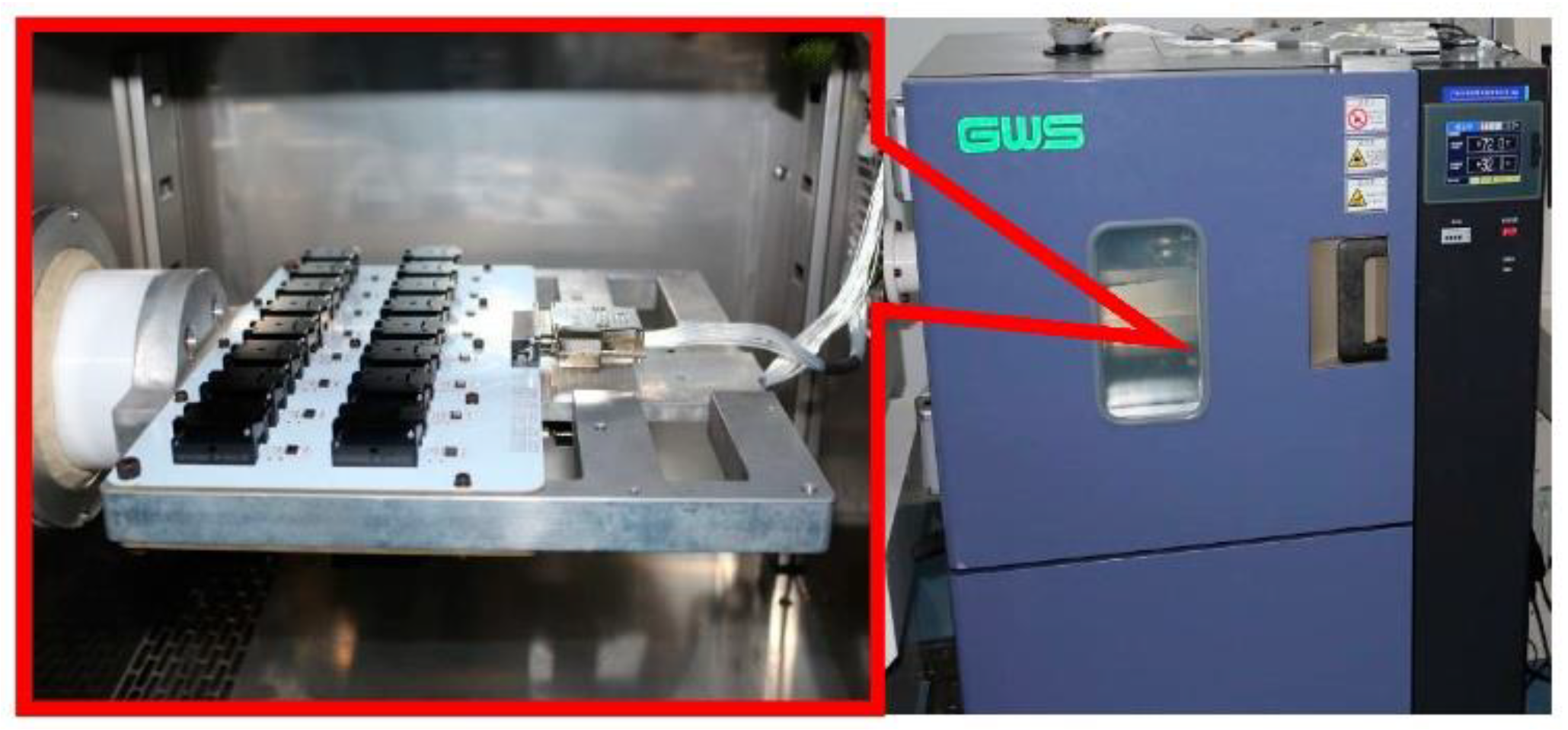
5. Comparative Experiments
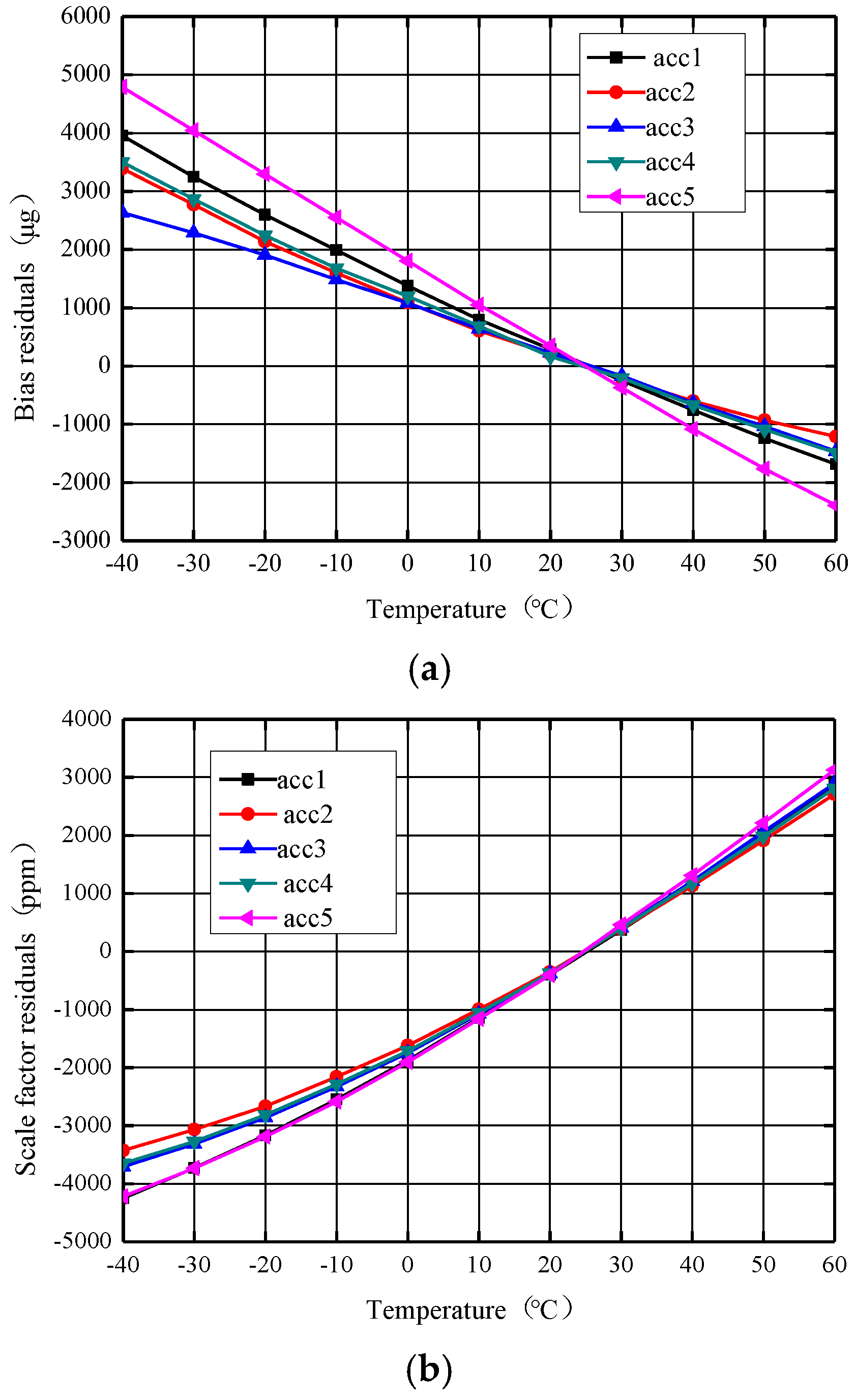
5.1. Uncompensated Experiments
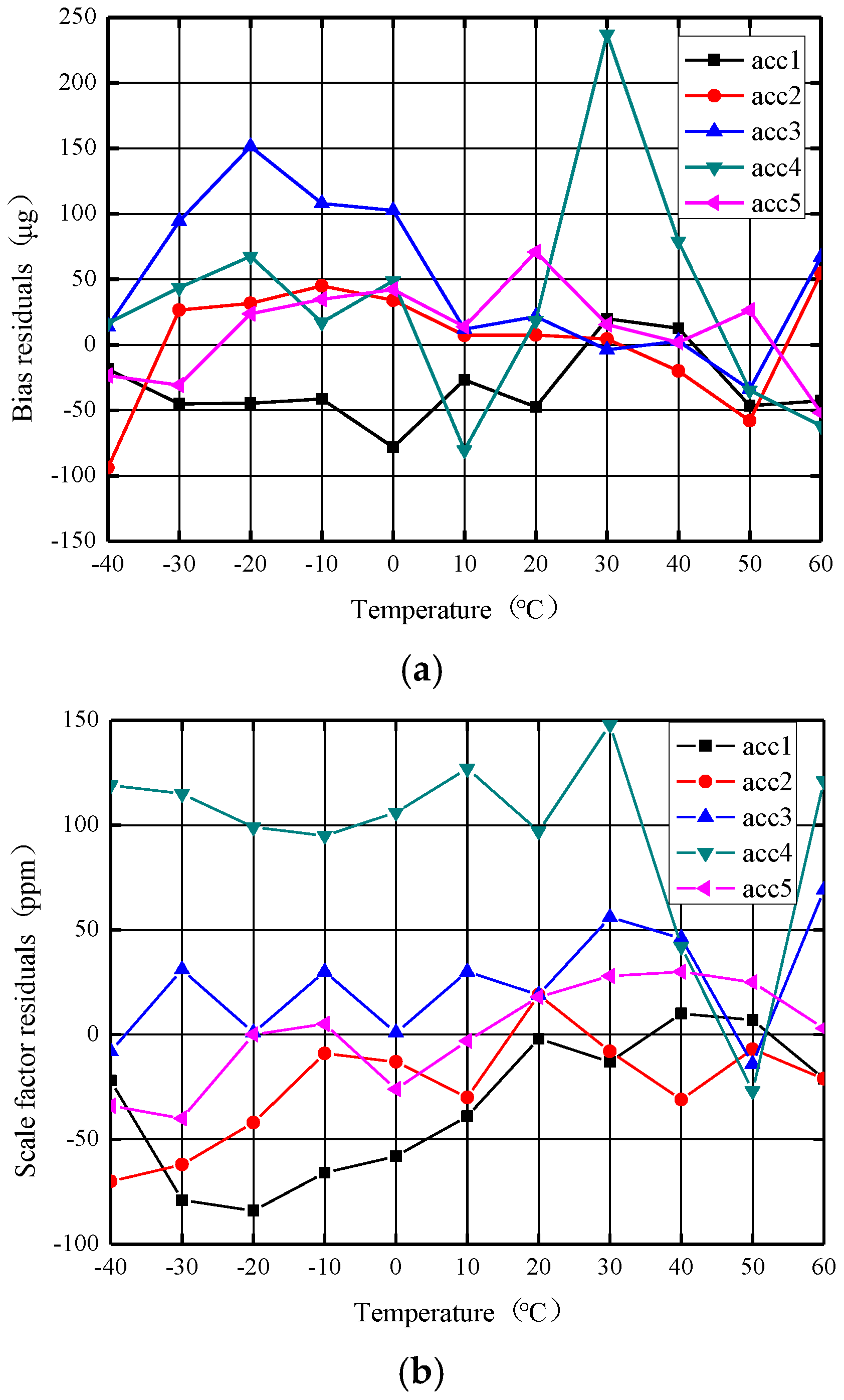
5.2. Accelerometer Stability over Temperature Experiment after Independent Reference Voltage Source Compensation
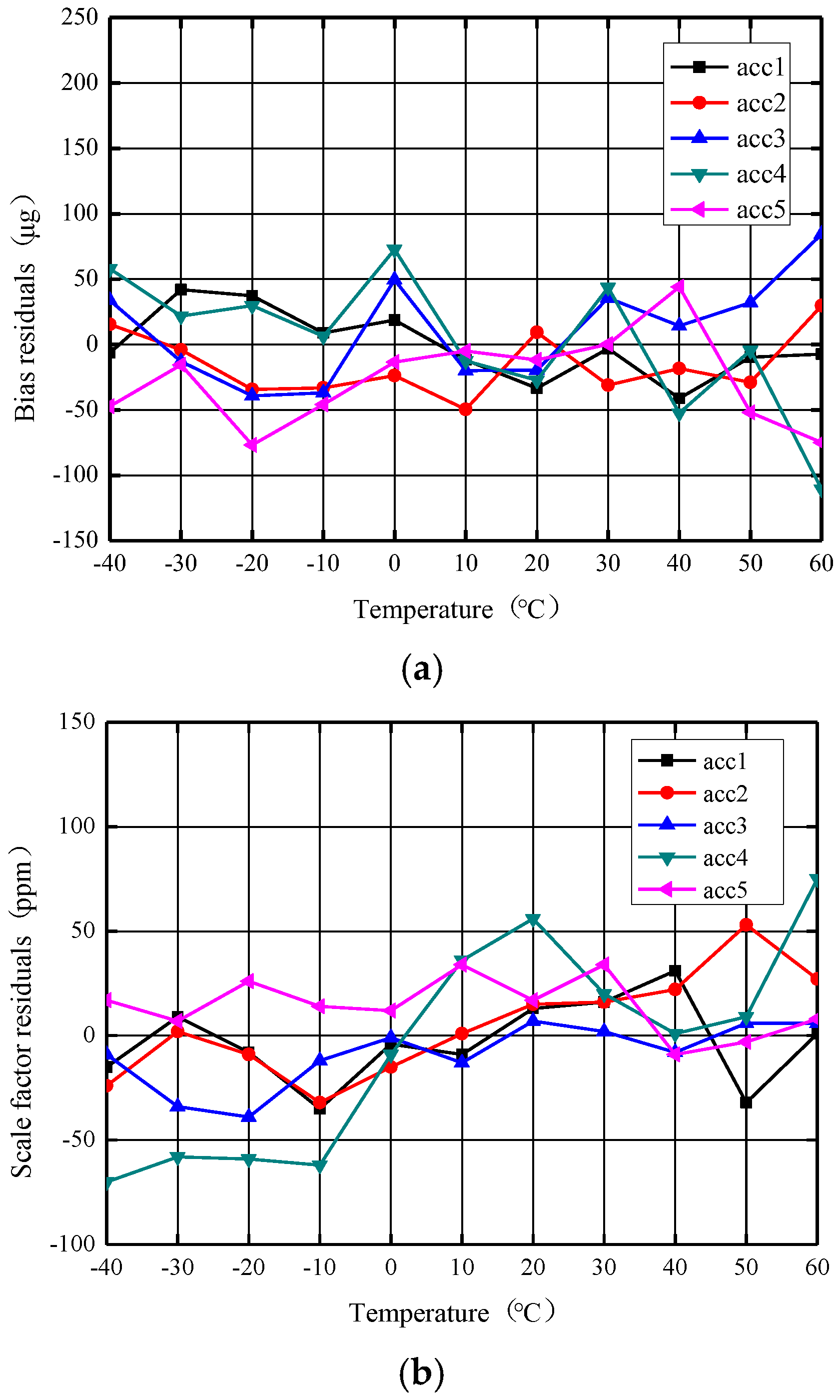
5.3. Accelerometer Stability over Temperature Experiment after Independent Terminal Temperature Compensation
5.4. Stability over Temperature Experiment with Combined Temperature Compensation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Marjoux, D.; Ullah, P.; Frantz-Rodriguez, N.; Morgado-Orsini, P.F.; Soursou, M.; Brisson, R.; Lenoir, Y.; Delhaye, F. Silicon MEMS By Safran—Navigation Grade Accelerometer Ready for Mass Production. In Proceedings of the 2020 DGON Inertial Sensors and Systems (ISS), Braunschweig, Germany, 15–16 September 2020; pp. 1–18. [Google Scholar] [CrossRef]
- Zwahlen, P.; Dong, Y.; Nguyen, A.-M.; Rudolf, F.; Stauffer, J.-M.; Ullah, P.; Ragot, V. Breakthrough in High Performance Inertial Navigation Grade Sigma-Delta MEMS Accelerometer. In Proceedings of the 2012 IEEE/ION Position, Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 15–19. [Google Scholar] [CrossRef]
- Zotov, S.A.; Simon, B.R.; Trusov, A.A.; Shkel, A.M. High Quality Factor Resonant MEMS Accelerometer with Continuous Thermal Compensation. IEEE Sens. J. 2015, 15, 5045–5052. [Google Scholar] [CrossRef]
- Ruzza, G.; Guerriero, L.; Revellino, P.; Guadagno, F.M. Thermal Compensation of Low-cost MEMS Accelerometers for Tilt Measurements. Sensors 2018, 18, 2536. [Google Scholar] [CrossRef] [PubMed]
- Xu, W.; Tang, B.; Xie, G.; Yang, J. An All-Silicon Double Differential MEMS Accelerometer with Improved Thermal Stability. In Proceedings of the 2018 IEEE SENSORS, New Delhi, India, 28–31 October 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Niu, H.; Sun, G.; Wang, S.; Zhang, F. A Design of Capacitance MEMS Accelerometer with Wafer Level Encapsulated All-Silicon Comb Tooth. J. Chin. Inert. Technol. 2020, 28, 672–676. [Google Scholar] [CrossRef]
- Liu, D.; Wu, W.; Yan, S.; Xu, Q.; Wang, Y.; Liu, H.; Tu, L. In-Situ Compensation on Temperature Coefficient of The Scale Factor for A Single-Axis Nano-G Force-Balance MEMS Accelerometer. IEEE Sens. J. 2021, 21, 19872–19880. [Google Scholar] [CrossRef]
- Wang, Q.; Li, Y.; Niu, X. Thermal Calibration Procedure and Thermal Characterization of Low-cost Inertial Measurement Units. J. Navig. 2015, 69, 373–390. [Google Scholar] [CrossRef]
- Gheorghe, M. Advanced Calibration Method, with Thermal Compensation, for 3-Axis MEMS Accelerometers. Rom. J. Inf. Sci. Technol. 2016, 19, 255–268. [Google Scholar]
- Lu, Q.; Shen, C.; Cao, H.; Shi, Y.; Liu, J. Fusion Algorithm-Based Temperature Compensation Method for High-G MEMS Accelerometer. Shock. Vib. 2019, 2019, 3154845. [Google Scholar] [CrossRef]
- Lima, V.; Cabral, J.; Kuhlmann, B.; Gaspar, J.; Rocha, L. Small-Size MEMS Accelerometer Encapsulated in Vacuum Using Sigma-Delta Modulation. In Proceedings of the 7th IEEE International Symposium on Inertial Sensors & Systems, Hiroshima, Japan, 23–26 March 2020. [Google Scholar] [CrossRef]
- Martínez, J.; Asiain, D.; Beltrán, J.R. Lightweight Thermal Compensation Technique for MEMS Capacitive Accelerometer Oriented to Quasi-Static Measurements. Sensors 2021, 21, 3117. [Google Scholar] [CrossRef] [PubMed]
- Martínez, J.; Asiain, D.; Beltrán, J.R. Factory Oriented Technique for Thermal Compensation in MEMS Capacitive Accelerometers. Eng. Proc. 2021, 10, 4. [Google Scholar] [CrossRef]
- Cai, P.; Xiong, X.; Wang, K.; Wang, J.; Zou, X. An Improved Difference Temperature Compensation Method for MEMS Resonant Accelerometers. Micromachines 2021, 12, 1022. [Google Scholar] [CrossRef] [PubMed]
- Qi, B.; Shi, S.; Zhao, L.; Cheng, J. A Novel Temperature Drift Error Precise Estimation Model for MEMS Accelerometers Using Microstructure Thermal Analysis. Micromachines 2022, 13, 835. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Zhu, W.; Shen, Y.; Ren, J.; Gu, H.; Wei, X. Temperature compensation for MEMS resonant accelerometer based on genetic algorithm optimization backpropagation neural network. Sens. Actuators A Phys. 2020, 316, 112393. [Google Scholar] [CrossRef]
- Guo, G.; Chai, B.; Cheng, R.; Wang, Y. Temperature Drift Compensation of a MEMS Accelerometer Based on DLSTM and ISSA. Sensors 2023, 23, 1809. [Google Scholar] [CrossRef] [PubMed]
- Yuan, B.; Tang, Z.; Zhang, P.; Lv, F. Thermal Calibration of Triaxial Accelerometer for Tilt Measurement. Sensors 2023, 23, 2105. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Ma, Z.; Zhang, T.; Jin, Y.; Ye, Z.; Zheng, X.; Jin, Z. Temperature Bias Drift Phase-Based Compensation for a MEMS Accelerometer with Stiffness-Tuning Double-Sided Parallel Plate Capacitors. Nanomanufacturing Metrol. 2023, 6, 22. [Google Scholar] [CrossRef]
- Liu, G.; Liu, Y.; Ma, X.; Wang, X.; Zheng, X.; Jin, Z. Research on a Method to Improve the Temperature Performance of an All-Silicon Accelerometer. Micromachines 2023, 14, 869. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Wang, T.; Yin, L.; Chen, X.; Guo, Y.; Liu, X. Closed-loop system of a capacitive micro-accelerometer. J. Harbin Inst. Technol. 2010, 42, 1720–1723. [Google Scholar]
- Wu, T.; Dong, J.; Liu, Y. Closed-Loop System Bias in A Capacitive Micro-Accelerometer. J. Tsinghua Univ. (Sci. Tech.) 2005, 45, 201–204. [Google Scholar]
- Hilbiber, D.F. A new semiconductor voltage standard. In Proceedings of the IEEE International Conference on Solid-State Circuits (ISSCC), Philadelphia, PA, USA, 19–21 February 1964; pp. 32–33. [Google Scholar] [CrossRef]
- Kuijk, K.E. A precision reference voltage source. IEEE J. Solid-Circuits 1973, 8, 222–226. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Uncompensated | Voltage Reference Source Compensation | Terminal Temperature Compensation | Combined Compensation |
|---|---|---|---|---|
| Zero bias variation over temperature (p–p) μg | 4098 | 3367 | 185 | 124 |
| Zero bias stability over temperature (1σ) μg | 1374 | 1156 | 59 | 40 |
| Scale factor variation over temperature (p–p) ppm | 6606 | 765 | 83 | 46 |
| Scale factor stability over temperature (1σ) ppm | 2233 | 242 | 27 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Liu, Y.; Li, Z.; Ma, Z.; Ma, X.; Wang, X.; Zheng, X.; Jin, Z. Combined Temperature Compensation Method for Closed-Loop Microelectromechanical System Capacitive Accelerometer. Micromachines 2023, 14, 1623. https://doi.org/10.3390/mi14081623
Liu G, Liu Y, Li Z, Ma Z, Ma X, Wang X, Zheng X, Jin Z. Combined Temperature Compensation Method for Closed-Loop Microelectromechanical System Capacitive Accelerometer. Micromachines. 2023; 14(8):1623. https://doi.org/10.3390/mi14081623
Chicago/Turabian StyleLiu, Guowen, Yu Liu, Zhaohan Li, Zhikang Ma, Xiao Ma, Xuefeng Wang, Xudong Zheng, and Zhonghe Jin. 2023. "Combined Temperature Compensation Method for Closed-Loop Microelectromechanical System Capacitive Accelerometer" Micromachines 14, no. 8: 1623. https://doi.org/10.3390/mi14081623