
Single-Line Multi-Channel Flexible Stress Sensor Arrays
 , ,
, ,
Abstract
:1. Introduction
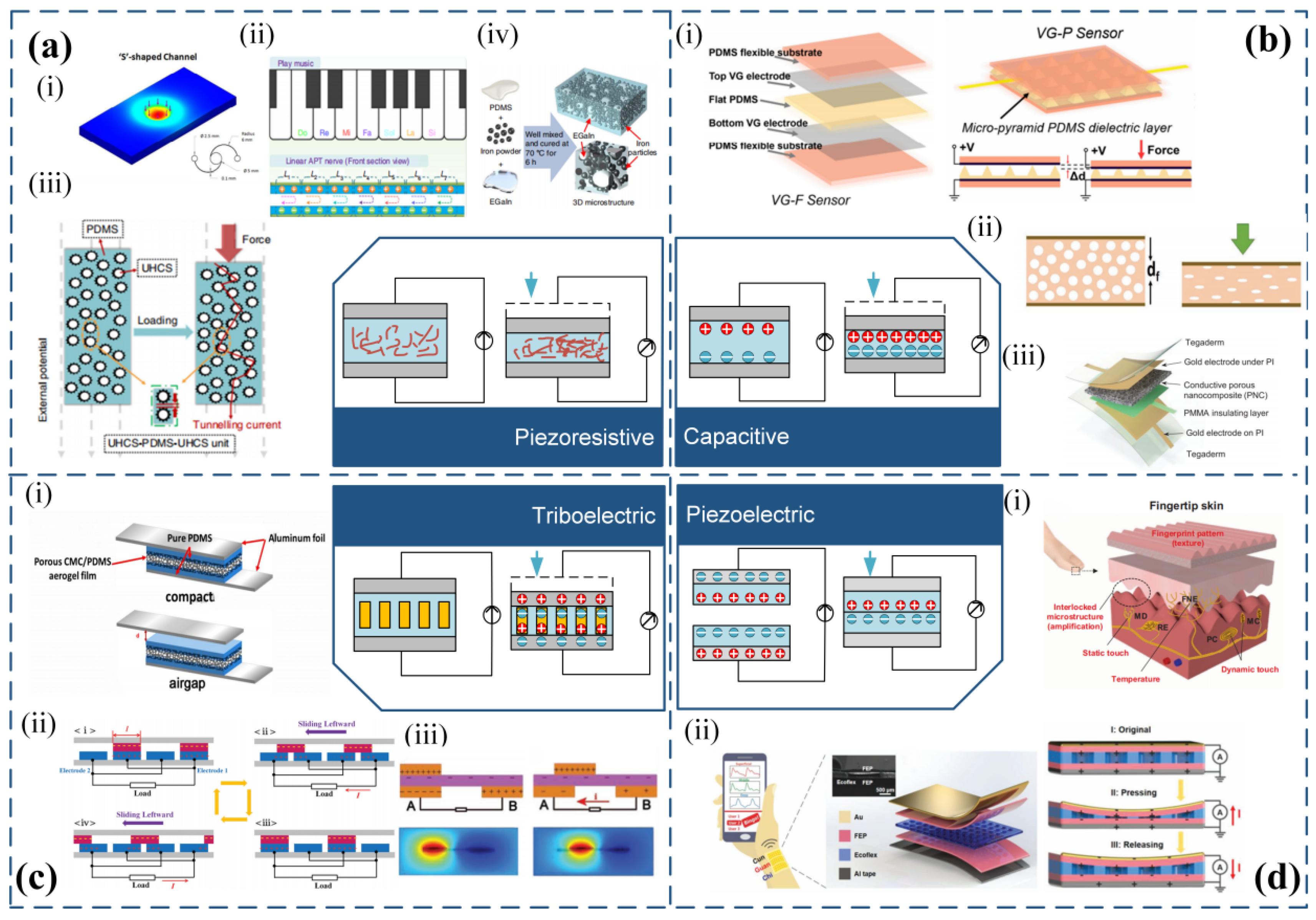
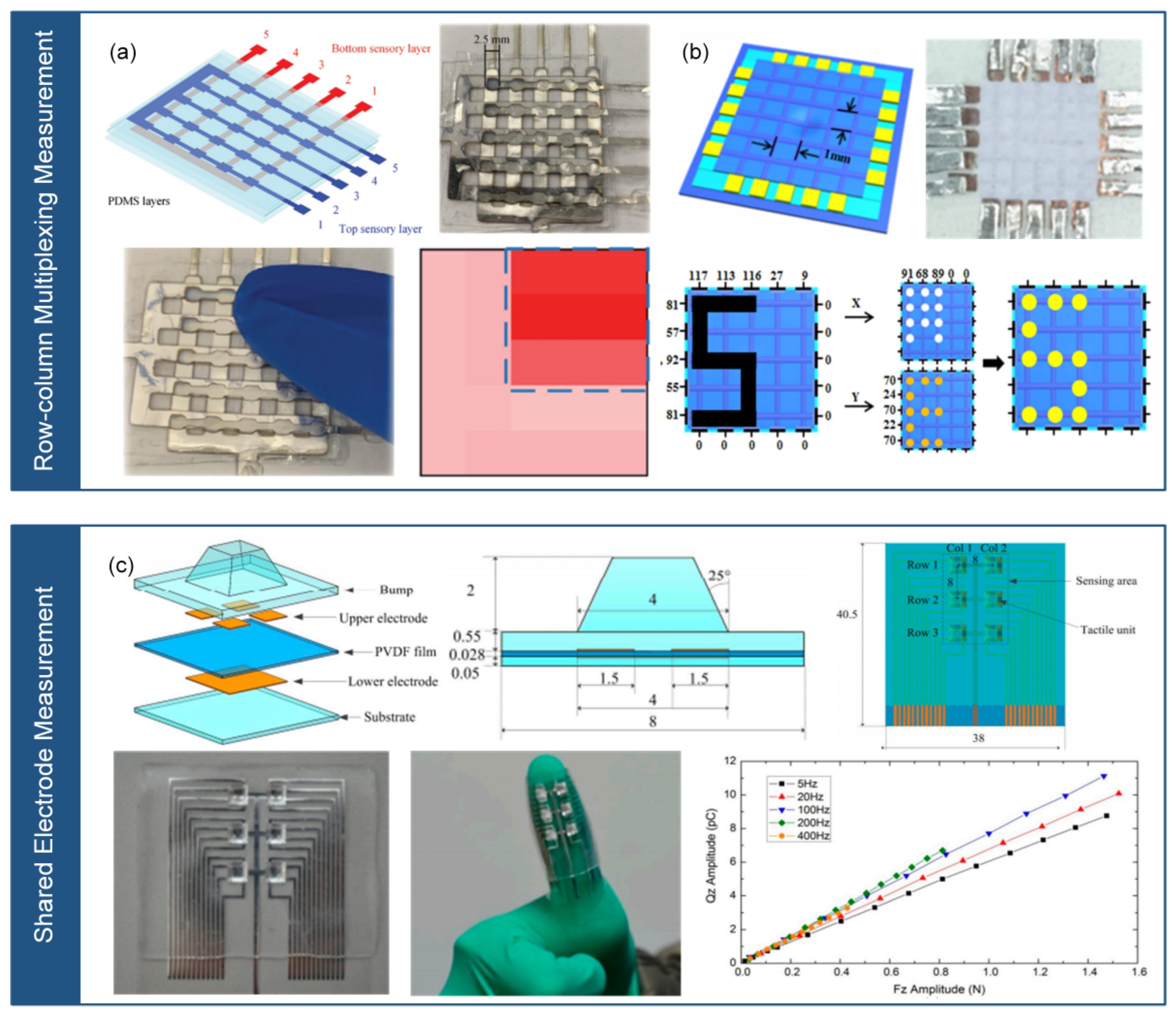
2. Traditional Flexible Stress Sensor Array
2.1. Piezoresistive Flexible Stress Sensor Array Method


2.2. Capacitive Flexible Stress Sensor Array Method

2.3. Triboelectric Flexible Stress Sensor Array Method
2.4. Piezoelectric Flexible Stress Sensor Array Method
3. Single-Line Multi-Channel Measurement
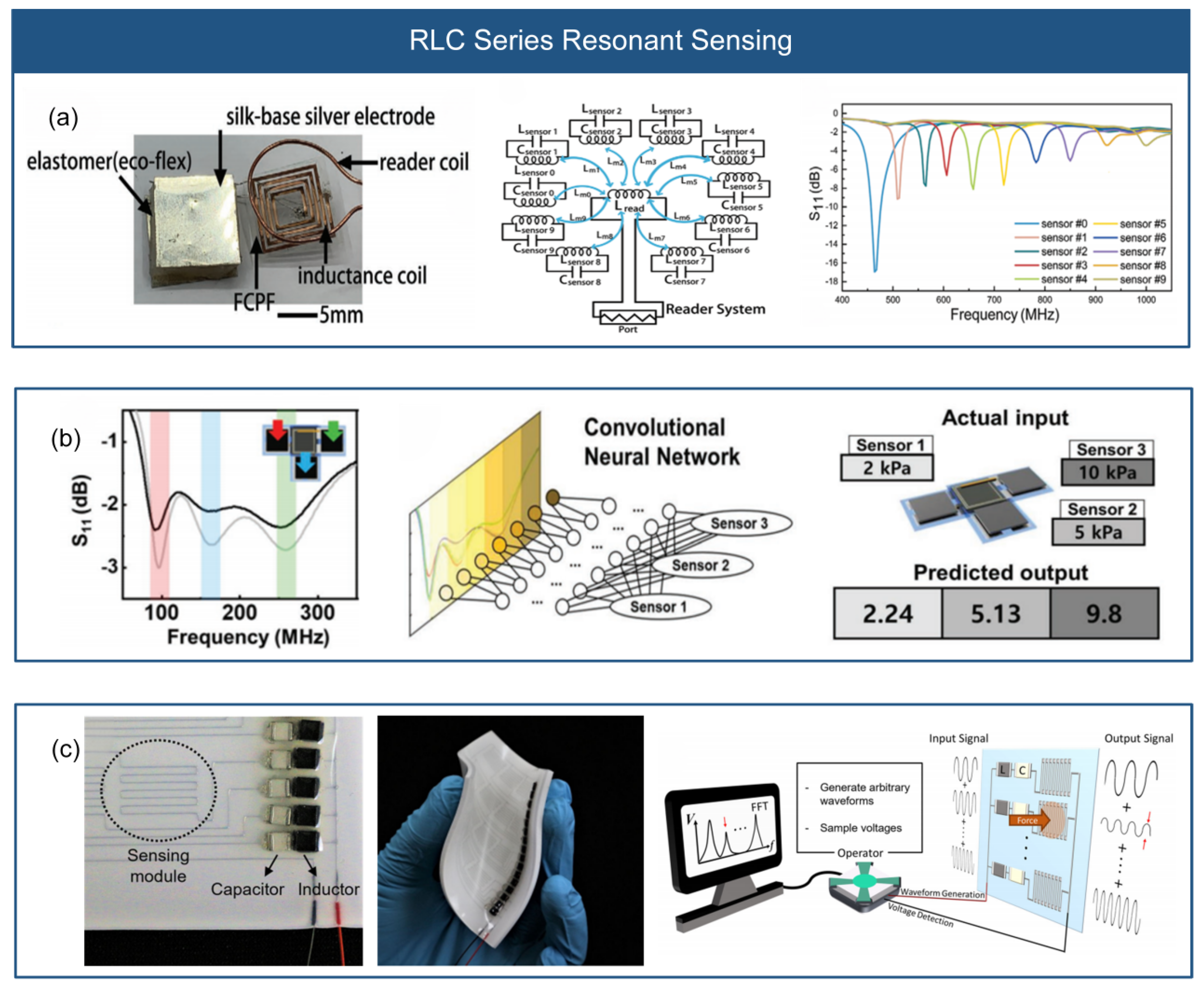
3.1. RLC Resonant Sensing

3.2. Transmission Line Sensing
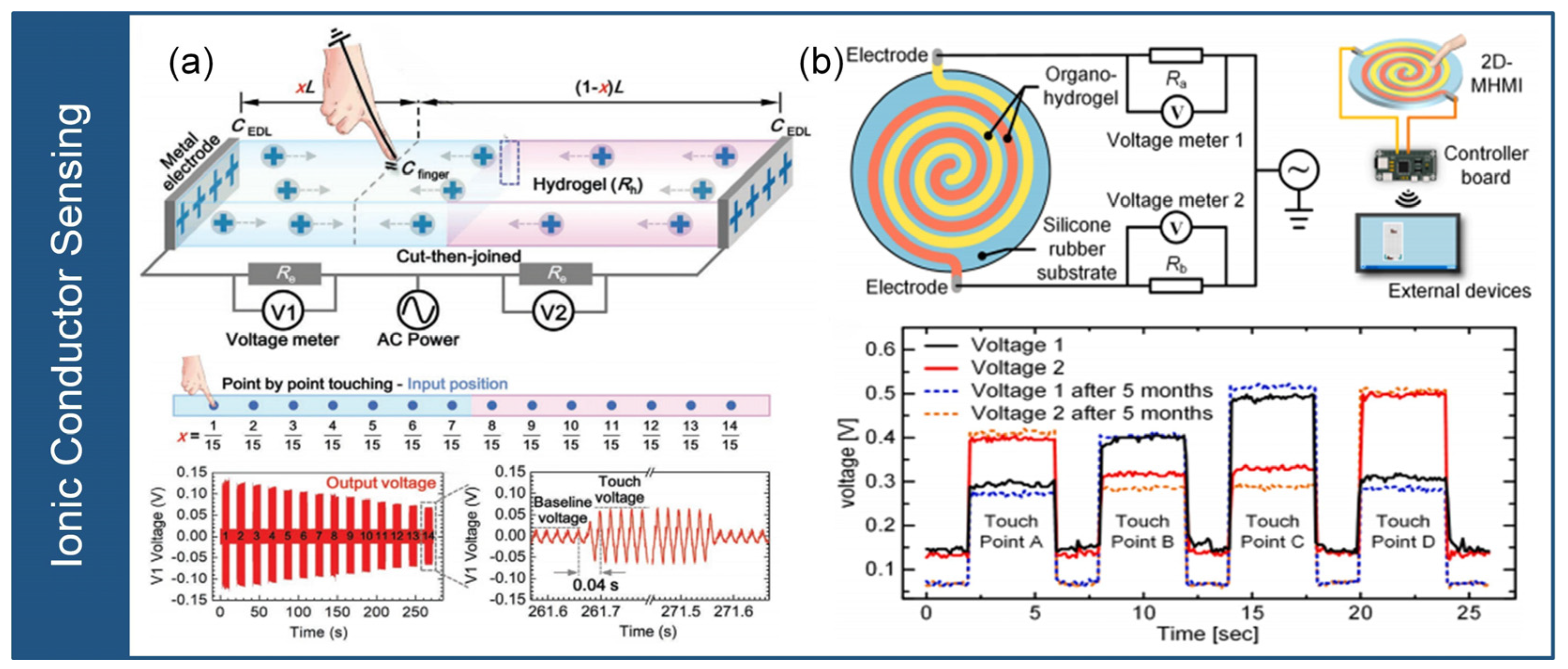
3.3. Ionic Conductor Sensing

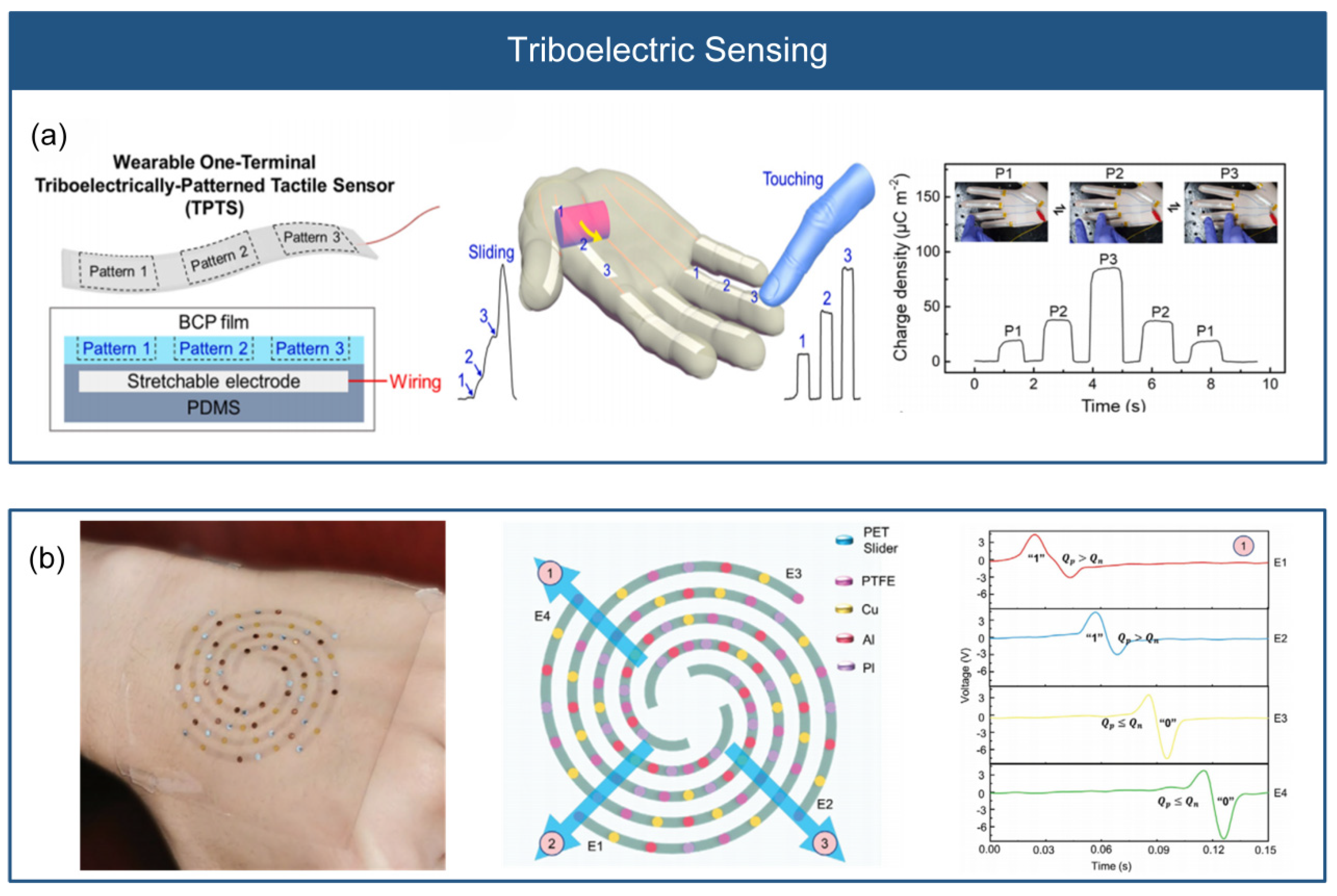
3.4. Triboelectric Sensing

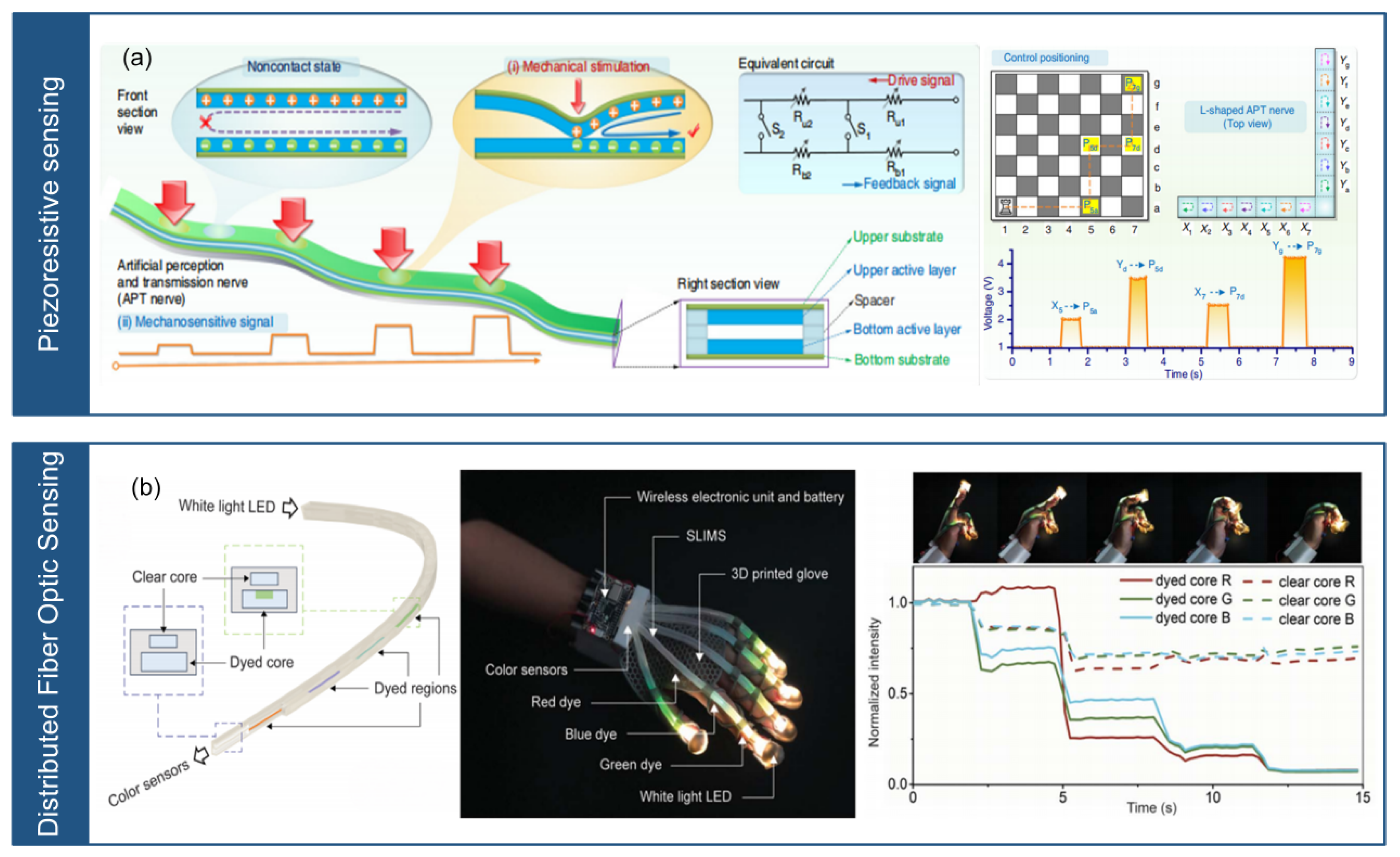
3.5. Piezoresistive Sensing

3.6. Distributed Fiber Optic Sensing
4. Summary and Prospect
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hammock, M.L.; Chortos, A.; Tee, B.C.; Tok, J.B.; Bao, Z. 25th anniversary article: The evolution of electronic skin (e-skin): A brief history, design considerations, and recent progress. Adv. Mater. 2013, 25, 5997–6038. [Google Scholar] [PubMed]
- Yang, R.; Zhang, W.; Tiwari, N.; Yan, H.; Li, T.; Cheng, H. Multimodal Sensors with Decoupled Sensing Mechanisms. Adv. Sci. 2022, 9, e2202470. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.E. Flexible and Stretchable Physical Sensor Integrated Platforms for Wearable Human-Activity Monitoringand Personal Healthcare. Adv. Mater. 2016, 28, 4338–4372. [Google Scholar] [CrossRef] [PubMed]
- Chen, G.; Rastak, R.; Wang, Y.; Yan, H.; Feig, V.; Liu, Y.; Jiang, Y.; Chen, S.; Lian, F.; Molina-Lopez, F.; et al. Strain- and Strain-Rate-Invariant Conductance in a Stretchable and Compressible 3D Conducting Polymer Foam. Matter 2019, 1, 205–218. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.Y.; Tee, B.C.K.; Chortos, A.L.; Schwartz, G.; Tse, V.; Lipomi, D.J.; Wong, H.S.P.; McConnell, M.V.; Bao, Z.A. Continuous wireless pressure monitoring and mapping with ultra-small passive sensors for health monitoring and critical care. Nat. Commun. 2014, 5, 5028. [Google Scholar] [CrossRef] [Green Version]
- O’Neill, S.J.K.; Gong, H.; Matsuhisa, N.; Chen, S.; Moon, H.; Wu, H.C.; Chen, X.; Chen, X.; Bao, Z. A Carbon Flower Based Flexible Pressure Sensor Made from Large-Area Coating. Adv. Mater. Interfaces 2020, 7, 2000875. [Google Scholar] [CrossRef]
- Mannsfeld, S.C.; Tee, B.C.; Stoltenberg, R.M.; Chen, C.V.; Barman, S.; Muir, B.V.; Sokolov, A.N.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Fan, J.A.; Yeo, W.H.; Su, Y.; Hattori, Y.; Lee, W.; Jung, S.Y.; Zhang, Y.; Liu, Z.; Cheng, H.; Falgout, L.; et al. Fractal design concepts for stretchable electronics. Nat. Commun. 2014, 5, 3266. [Google Scholar] [CrossRef] [Green Version]
- Won, S.M.; Wang, H.; Kim, B.H.; Lee, K.; Jang, H.; Kwon, K.; Han, M.; Crawford, K.E.; Li, H.; Lee, Y.; et al. Multimodal Sensing with a Three-Dimensional Piezoresistive Structure. ACS Nano 2019, 13, 10972–10979. [Google Scholar] [CrossRef]
- Yu, X.; Xie, Z.; Yu, Y.; Lee, J.; Vazquez-Guardado, A.; Luan, H.; Ruban, J.; Ning, X.; Akhtar, A.; Li, D.; et al. Skin-integrated wireless haptic interfaces for virtual and augmented reality. Nature 2019, 575, 473–479. [Google Scholar] [CrossRef]
- Oh, Y.S.; Kim, J.H.; Xie, Z.; Cho, S.; Han, H.; Jeon, S.W.; Park, M.; Namkoong, M.; Avila, R.; Song, Z.; et al. Battery-free, wireless soft sensors for continuous multi-site measurements of pressure and temperature from patients at risk for pressure injuries. Nat. Commun. 2021, 12, 5008. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Zhang, Y.; Jia, L.; Mathewson, K.E.; Jang, K.I.; Kim, J.; Fu, H.; Huang, X.; Chava, P.; Wang, R.; et al. Soft microfluidic assemblies of sensors, circuits, and radios for the skin. Science 2014, 344, 70–74. [Google Scholar] [CrossRef] [PubMed]
- Xia, Y.; Rogers, J.A.; Paul, K.E.; Whitesides, G.M. Unconventional Methods for Fabricating and Patterning Nanostructures. Chem. Rev. 1999, 99, 1823–1848. [Google Scholar] [CrossRef] [PubMed]
- Pan, L.; Yu, G.; Zhai, D.; Lee, H.R.; Zhao, W.; Liu, N.; Wang, H.; Tee, B.C.; Shi, Y.; Cui, Y.; et al. Hierarchical nanostructured conducting polymer hydrogel with high electrochemical activity. Proc. Natl. Acad. Sci. USA 2012, 109, 9287–9292. [Google Scholar] [CrossRef]
- Wen, H.; Chen, C.; Li, S.; Shi, Y.; Wang, H.; Guo, W.; Liu, X. Array Integration and Far-Field Detection of Biocompatible Wireless LC Pressure Sensors. Small Methods 2021, 5, e2001055. [Google Scholar] [CrossRef]
- Leber, A.; Dong, C.Q.; Chandran, R.; Das Gupta, T.; Bartolomei, N.; Sorin, F. Soft and stretchable liquid metal transmission lines as distributed probes of multimodal deformations. Nat. Electron. 2020, 3, 316–326. [Google Scholar] [CrossRef]
- Aksoy, B.; Hao, Y.; Grasso, G.; Digumarti, K.M.; Cacucciolo, V.; Shea, H. Shielded soft force sensors. Nat. Commun. 2022, 13, 4649. [Google Scholar] [CrossRef]
- Cooper, C.B.; Arutselvan, K.; Liu, Y.; Armstrong, D.; Lin, Y.; Khan, M.R.; Genzer, J.; Dickey, M.D. Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers. Adv. Funct. Mater. 2017, 27, 1605630. [Google Scholar] [CrossRef]
- Ge, G.; Zhang, Y.Z.; Zhang, W.; Yuan, W.; El-Demellawi, J.K.; Zhang, P.; Di Fabrizio, E.; Dong, X.; Alshareef, H.N. Ti(3)C(2)T(x) MXene-Activated Fast Gelation of Stretchable and Self-Healing Hydrogels: A Molecular Approach. ACS Nano 2021, 15, 2698–2706. [Google Scholar] [CrossRef]
- Bae, G.Y.; Han, J.T.; Lee, G.; Lee, S.; Kim, S.W.; Park, S.; Kwon, J.; Jung, S.; Cho, K. Pressure/Temperature Sensing Bimodal Electronic Skin with Stimulus Discriminability and Linear Sensitivity. Adv. Mater. 2018, 30, e1803388. [Google Scholar] [CrossRef]
- Zhao, X.F.; Hang, C.Z.; Wen, X.H.; Liu, M.Y.; Zhang, H.; Yang, F.; Ma, R.G.; Wang, J.C.; Zhang, D.W.; Lu, H.L. Ultrahigh-Sensitive Finlike Double-Sided E-Skin for Force Direction Detection. ACS Appl. Mater. Interfaces 2020, 12, 14136–14144. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.M.; Zhang, Y.X.; Jiang, X.; Bukhari, H.; Zhang, Z.X.; Han, W.H.; Xie, E.Q. Simple and efficient pressure sensor based on PDMS wrapped CNT arrays. Carbon 2019, 155, 71–76. [Google Scholar] [CrossRef]
- Ge, G.; Wang, Q.; Zhang, Y.Z.; Alshareef, H.N.; Dong, X.C. 3D Printing of Hydrogels for Stretchable Ionotronic Devices. Adv. Funct. Mater. 2021, 31, 2107437. [Google Scholar] [CrossRef]
- Ge, G.; Mandal, K.; Haghniaz, R.; Li, M.; Xiao, X.; Carlson, L.; Jucaud, V.; Dokmeci, M.R.; Ho, G.W.; Khademhosseini, A. Deep Eutectic Solvents-based Ionogels with Ultrafast Gelation and High Adhesion in Harsh Environments. Adv. Funct. Mater. 2023, 33, 2207388. [Google Scholar] [CrossRef] [PubMed]
- Ge, G.; Lu, Y.; Qu, X.; Zhao, W.; Ren, Y.; Wang, W.; Wang, Q.; Huang, W.; Dong, X. Muscle-Inspired Self-Healing Hydrogels for Strain and Temperature Sensor. ACS Nano 2020, 14, 218–228. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Luo, Y.; Wang, T.; Wan, C.; Pan, L.; Pan, S.; He, K.; Neo, A.; Chen, X. Artificial Skin Perception. Adv. Mater. 2021, 33, e2003014. [Google Scholar] [CrossRef]
- Kim, T.; Lee, S.; Hong, T.; Shin, G.; Kim, T.; Park, Y.L. Heterogeneous sensing in a multifunctional soft sensor for human-robot interfaces. Sci. Robot. 2020, 5, eabc6878. [Google Scholar] [CrossRef]
- Lee, G.H.; Park, J.K.; Byun, J.; Yang, J.C.; Kwon, S.Y.; Kim, C.; Jang, C.; Sim, J.Y.; Yook, J.G.; Park, S. Parallel Signal Processing of a Wireless Pressure-Sensing Platform Combined with Machine-Learning-Based Cognition, Inspired by the Human Somatosensory System. Adv. Mater. 2020, 32, e1906269. [Google Scholar] [CrossRef]
- Xu, B.C.; Chen, D.; Wang, Y.; Tang, R.L.; Yang, L.A.; Feng, H.; Liu, Y.J.; Wang, Z.P.; Wang, F.; Zhang, T. Wireless and Flexible Tactile Sensing Array Based on an Adjustable Resonator with Machine-Learning Perception. Adv. Electron. Mater. 2023, 9, 2201334. [Google Scholar] [CrossRef]
- Wu, X.; Ahmed, M.; Khan, Y.; Payne, M.E.; Zhu, J.; Lu, C.; Evans, J.W.; Arias, A.C. A potentiometric mechanotransduction mechanism for novel electronic skins. Sci. Adv. 2020, 6, eaba1062. [Google Scholar] [CrossRef]
- Wu, C.G.; Han, L.; Dong, Y.P.; Guo, M.M.; Wang, R.; Si, J.W. Wireless Battery-Free Flexible Sensing System for Continuous Wearable Health Monitoring. Adv. Mater. Technol. 2023, 8, 2201662. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Park, Y.L. Single-input single-output multi-touch soft sensor systems using band-pass filters. Npj Flex. Electron. 2022, 6, 65. [Google Scholar] [CrossRef]
- Gao, G.; Yang, F.; Zhou, F.; He, J.; Lu, W.; Xiao, P.; Yan, H.; Pan, C.; Chen, T.; Wang, Z.L. Bioinspired Self-Healing Human-Machine Interactive Touch Pad with Pressure-Sensitive Adhesiveness on Targeted Substrates. Adv. Mater. 2020, 32, e2004290. [Google Scholar] [CrossRef]
- Bai, H.; Li, S.; Barreiros, J.; Tu, Y.; Pollock, C.R.; Shepherd, R.F. Stretchable distributed fiber-optic sensors. Science 2020, 370, 848–852. [Google Scholar] [CrossRef]
- Yang, Y.N.; Li, X.; Shen, Y.J. Electrode Array-Free Tactile Sensor for Addressable Force Sensing Assisted by a Neural Network. ACS Appl. Polym. Mater. 2022, 4, 4551–4557. [Google Scholar] [CrossRef]
- Wu, W.; Ren, Y.; Jiang, T.; Hou, L.; Zhou, J.; Jiang, H. Anti-drying, transparent, ion-conducting, and tough organohydrogels for wearable multifunctional human–machine interfaces. Chem. Eng. J. 2022, 430, 132635. [Google Scholar] [CrossRef]
- Wang, P.F.; Liu, P.; Feng, H.; Li, Y.W.; Zhang, Q.; Hu, R.H.; Liu, C.X.; Xing, K.; Song, A.G.; Yang, X.M.; et al. Flexible and Wireless Normal-Tangential Force Sensor Based on Resonant Mechanism for Robotic Gripping Applications. Adv. Mater. Technol. 2022, 7, 2101385. [Google Scholar] [CrossRef]
- Nie, B.; Huang, R.; Yao, T.; Zhang, Y.; Miao, Y.; Liu, C.; Liu, J.; Chen, X. Textile-Based Wireless Pressure Sensor Array for Human-Interactive Sensing. Adv. Funct. Mater. 2019, 29, 1808786. [Google Scholar] [CrossRef]
- Lee, G.H.; Lee, G.S.; Byun, J.; Yang, J.C.; Jang, C.; Kim, S.; Kim, H.; Park, J.K.; Lee, H.J.; Yook, J.G.; et al. Deep-Learning-Based Deconvolution of Mechanical Stimuli with Ti3C2Tx MXene Electromagnetic Shield Architecture via Dual-Mode Wireless Signal Variation Mechanism. ACS Nano 2020, 14, 11962–11972. [Google Scholar] [CrossRef]
- Ho, D.H.; Roe, D.G.; Choi, Y.Y.; Kim, S.; Choi, Y.J.; Kim, D.H.; Jo, S.B.; Cho, J.H. Non-von Neumann multi-input spike signal processing enabled by an artificial synaptic multiplexer. Sci. Adv. 2022, 8, eabn1838. [Google Scholar] [CrossRef]
- Liao, X.; Song, W.; Zhang, X.; Yan, C.; Li, T.; Ren, H.; Liu, C.; Wang, Y.; Zheng, Y. A bioinspired analogous nerve towards artificial intelligence. Nat. Commun. 2020, 11, 268. [Google Scholar] [CrossRef] [Green Version]
- Jang, J.; Kim, D.W.; Lee, J.H.; Choi, C.; Go, M.; Kim, J.K.; Jeong, U. Triboelectric UV patterning for wearable one-terminal tactile sensor array to perceive dynamic contact motions. Nano Energy 2022, 98, 107320. [Google Scholar] [CrossRef]
- Guo, H.; Wang, H.B.; Xiang, Z.H.; Wu, H.X.; Wan, J.; Xu, C.; Chen, H.T.; Han, M.D.; Zhang, H.X. Soft Human-Machine Interface with Triboelectric Patterns and Archimedes Spiral Electrodes for Enhanced Motion Detection. Adv. Funct. Mater. 2021, 31, 2103075. [Google Scholar] [CrossRef]
- Cheng, G.Y.; Xu, H.T.; Gao, N.F.; Zhang, M.Q.; Gao, H.L.; Sun, B.H.; Gu, M.X.; Yu, L.Y.; Lin, Y.C.; Liu, X.Q.; et al. Carbon nanotubes field-effect transistor pressure sensor based on three-dimensional conformal force-sensitive gate modulation. Carbon 2023, 204, 456–464. [Google Scholar] [CrossRef]
- Lin, Y.C.; Cai, M.X.; Yang, Y.J. A wireless passive pressure sensor using microstructured ferromagnetic films with tunable effective permeability. J. Micromech. Microeng. 2021, 31, 045017. [Google Scholar] [CrossRef]
- Deng, W.-J.; Wang, L.-F.; Dong, L.; Huang, Q.-A. LC Wireless Sensitive Pressure Sensors With Microstructured PDMS Dielectric Layers for Wound Monitoring. IEEE Sens. J. 2018, 18, 4886–4892. [Google Scholar] [CrossRef]
- Banerjee, H.; Leber, A.; Laperrousaz, S.; La Polla, R.; Dong, C.; Mansour, S.; Wan, X.; Sorin, F. Soft Multimaterial Magnetic Fibers and Textiles. Adv. Mater. 2023, e2212202. [Google Scholar] [CrossRef]
- Dong, C.; Leber, A.; Yan, D.; Banerjee, H.; Laperrousaz, S.; Das Gupta, T.; Shadman, S.; Reis, P.M.; Sorin, F. 3D stretchable and self-encapsulated multimaterial triboelectric fibers. Sci. Adv. 2022, 8, eabo0869. [Google Scholar] [CrossRef]
- Zhu, M.L.; He, T.Y.Y.; Lee, C.K. Technologies toward next generation human machine interfaces: From machine learning enhanced tactile sensing to neuromorphic sensory systems. Appl. Phys. Rev. 2020, 7, 031305. [Google Scholar] [CrossRef]
- Duan, L.Y.; D’hooge, D.R.; Cardon, L. Recent progress on flexible and stretchable piezoresistive strain sensors: From design to application. Prog. Mater. Sci. 2020, 114, 100617. [Google Scholar] [CrossRef]
- Xu, J.; Wang, Z.M.; Wang, X.X.; Wu, Y.L.; Xing, R.Z.; Yu, T.T.; Li, Y.; Ao, J.P.; Tao, Y.B.; Bai, B.W.; et al. Breathable Encapsulated Liquid Metal Foam-Based Soft Stress Sensor. Adv. Mater. Technol. 2023, 8, 2201193. [Google Scholar] [CrossRef]
- Yu, T.T.; Zhang, D.G.; Wu, Y.L.; Guo, S.Z.; Lei, F.; Li, Y.; Yang, J.Y. Graphene foam pressure sensor based on fractal electrode with high sensitivity and wide linear range. Carbon 2021, 182, 497–505. [Google Scholar] [CrossRef]
- Yang, J.Y.; Tang, D.; Ao, J.P.; Ghosh, T.; Neumann, T.V.; Zhang, D.G.; Piskarev, Y.; Yu, T.T.; Truong, V.K.; Xie, K.; et al. Ultrasoft Liquid Metal Elastomer Foams with Positive and Negative Piezopermittivity for Tactile Sensing. Adv. Funct. Mater. 2020, 30, 2002611. [Google Scholar] [CrossRef]
- Liang, C.Y.; Wu, Y.L.; Zhang, D.G.; Tao, Y.B.; Yu, T.T.; Xing, R.Z.; Yang, J.Y. Biomimetic Liquid Metal Elastomer Foam With Stress Sensing. IEEE Sens. J. 2023, 23, 5841–5848. [Google Scholar] [CrossRef]
- Xue, X.T.; Zhang, D.G.; Wu, Y.L.; Xing, R.Z.; Li, H.; Yu, T.T.; Bai, B.W.; Tao, Y.B.; Dickey, M.D.; Yang, J.Y. Segregated and Non-Settling Liquid Metal Elastomer via Jamming of Elastomeric Particles. Adv. Funct. Mater. 2023, 33, 2210553. [Google Scholar] [CrossRef]
- Zhou, Z.H.; Chen, K.; Li, X.S.; Zhang, S.L.; Wu, Y.F.; Zhou, Y.H.; Meng, K.Y.; Sun, C.C.; He, Q.; Fan, W.J.; et al. Sign-to-speech translation using machine-learning-assisted stretchable sensor arrays. Nat. Electron. 2020, 3, 571–578. [Google Scholar] [CrossRef]
- Lai, Y.C.; Lu, H.W.; Wu, H.M.; Zhang, D.G.; Yang, J.Y.; Ma, J.; Shamsi, M.; Vallem, V.; Dickey, M.D. Elastic Multifunctional Liquid-Metal Fibers for Harvesting Mechanical and Electromagnetic Energy and as Self-Powered Sensors. Adv. Energy Mater. 2021, 11, 2100411. [Google Scholar] [CrossRef]
- Zhong, J.; Ma, Y.; Song, Y.; Zhong, Q.; Chu, Y.; Karakurt, I.; Bogy, D.B.; Lin, L. A Flexible Piezoelectret Actuator/Sensor Patch for Mechanical Human-Machine Interfaces. ACS Nano 2019, 13, 7107–7116. [Google Scholar] [CrossRef]
- Wu, Y.; Li, S.; Zhao, Z.; Zhang, D.; Xiong, X.; Yu, T.; Dickey, M.D.; Yang, J. Convex Microarrays-Based Liquid Metal Soft Piezoresistive Stress Sensor With High Sensitivity and Large Measurement Range. IEEE Sens. J. 2023, 23, 9176–9182. [Google Scholar] [CrossRef]
- Park, Y.L.; Majidi, C.; Kramer, R.; Berard, P.; Wood, R.J. Hyperelastic pressure sensing with a liquid-embedded elastomer. J. Micromech. Microeng. 2010, 20, 125029. [Google Scholar] [CrossRef] [Green Version]
- Yeo, J.C.; Kenry; Yu, J.; Loh, K.P.; Wang, Z.; Lim, C.T. Triple-State Liquid-Based Microfluidic Tactile Sensor with High Flexibility, Durability, and Sensitivity. ACS Sens. 2016, 1, 543–551. [Google Scholar] [CrossRef]
- Shi, L.; Li, Z.; Chen, M.; Qin, Y.; Jiang, Y.; Wu, L. Quantum effect-based flexible and transparent pressure sensors with ultrahigh sensitivity and sensing density. Nat. Commun. 2020, 11, 3529. [Google Scholar] [CrossRef]
- Yun, G.; Tang, S.Y.; Sun, S.; Yuan, D.; Zhao, Q.; Deng, L.; Yan, S.; Du, H.; Dickey, M.D.; Li, W. Liquid metal-filled magnetorheological elastomer with positive piezoconductivity. Nat. Commun. 2019, 10, 1300. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chu, Y.; Zhong, J.W.; Liu, H.L.; Ma, Y.; Liu, N.; Song, Y.; Liang, J.M.; Shao, Z.C.; Sun, Y.; Dong, Y.; et al. Human Pulse Diagnosis for Medical Assessments Using a Wearable Piezoelectret Sensing System. Adv. Funct. Mater. 2018, 28, 1803413. [Google Scholar] [CrossRef]
- Li, W.; Liu, G.; Jiang, D.; Wang, C.; Li, W.; Guo, T.; Zhao, J.; Xi, F.; Liu, W.; Zhang, C. Interdigitated Electrode-Based Triboelectric Sliding Sensor for Security Monitoring. Adv. Mater. Technol. 2018, 3, 1800189. [Google Scholar] [CrossRef]
- Wu, X.D.; Khan, Y.; Ting, J.; Zhu, J.; Ono, S.; Zhang, X.X.; Du, S.X.; Evans, J.W.; Lu, C.H.; Arias, A.C. Large-Area Fabrication of High-Performance Flexible and Wearable Pressure Sensors. Adv. Electron. Mater. 2020, 6, 1901310. [Google Scholar] [CrossRef]
- Yu, Z.; Ying, W.B.; Pravarthana, D.; Li, Y.Y.; Mao, G.Y.; Liu, Y.W.; Hu, C.; Zhang, W.X.; He, P.X.; Zhong, Z.C.; et al. Stretchable tactile sensor with high sensitivity and dynamic stability based on vertically aligned urchin-shaped nanoparticles. Mater. Today Phys. 2020, 14, 100219. [Google Scholar] [CrossRef]
- Lee, H.; Kwon, D.; Cho, H.; Park, I.; Kim, J. Soft Nanocomposite Based Multi-point, Multi-directional Strain Mapping Sensor Using Anisotropic Electrical Impedance Tomography. Sci. Rep. 2017, 7, 39837. [Google Scholar] [CrossRef] [Green Version]
- Duan, X.; Taurand, S.; Soleimani, M. Artificial skin through super-sensing method and electrical impedance data from conductive fabric with aid of deep learning. Sci. Rep. 2019, 9, 8831. [Google Scholar] [CrossRef] [Green Version]
- Ning, C.; Dong, K.; Cheng, R.W.; Yi, J.; Ye, C.Y.; Peng, X.; Sheng, F.F.; Jiang, Y.; Wang, Z.L. Flexible and Stretchable Fiber-Shaped Triboelectric Nanogenerators for Biomechanical Monitoring and Human-Interactive Sensing. Adv. Funct. Mater. 2021, 31, 2006679. [Google Scholar] [CrossRef]
- Zhang, D.G.; Zhong, Y.Q.; Wu, Y.L.; Zhang, X.F.; Dickey, M.D.; Yang, J.Y. Liquid metal elastomer with flytrap-inspired pillar structure for stress sensing. Compos. Sci. Technol. 2021, 216, 109066. [Google Scholar] [CrossRef]
- Zhang, D.G.; Zhang, J.; Wu, Y.L.; Xiong, X.Y.; Yang, J.Y.; Dickey, M.D. Liquid Metal Interdigitated Capacitive Strain Sensor with Normal Stress Insensitivity. Adv. Intell. Syst. 2022, 4, 2100201. [Google Scholar] [CrossRef]
- Zhang, D.G.; Wang, X.X.; Wu, Y.L.; Song, H.L.; Ma, Z.; Zhang, X.Y.; Yang, X.F.; Xing, R.Z.; Li, Y.; Yang, J.Y. Passive Particle Jamming Variable Stiffness Material-Based Flexible Capacitive Stress Sensor with High Sensitivity and Large Measurement Limit. Adv. Mater. Technol. 2021, 6, 2100106. [Google Scholar] [CrossRef]
- Yang, J.Y.; Kwon, K.Y.; Kanetkar, S.; Xing, R.Z.; Nithyanandam, P.; Li, Y.; Jung, W.; Gong, W.; Tuman, M.; Shen, Q.C.; et al. Skin-Inspired Capacitive Stress Sensor with Large Dynamic Range via Bilayer Liquid Metal Elastomers. Adv. Mater. Technol. 2022, 7, 2101074. [Google Scholar] [CrossRef]
- Zhao, K.; Han, J.; Ma, Y.; Tong, Z.; Suhr, J.; Wang, M.; Xiao, L.; Jia, S.; Chen, X. Highly Sensitive and Flexible Capacitive Pressure Sensors Based on Vertical Graphene and Micro-Pyramidal Dielectric Layer. Nanomaterials 2023, 13, 701. [Google Scholar] [CrossRef] [PubMed]
- Hesam Mahmoudinezhad, M.; Anderson, I.; Rosset, S. Interdigitated Sensor Based on a Silicone Foam for Subtle Robotic Manipulation. Macromol. Rapid Commun. 2021, 42, e2000560. [Google Scholar] [CrossRef]
- Ha, K.H.; Zhang, W.; Jang, H.; Kang, S.; Wang, L.; Tan, P.; Hwang, H.; Lu, N. Highly Sensitive Capacitive Pressure Sensors over a Wide Pressure Range Enabled by the Hybrid Responses of a Highly Porous Nanocomposite. Adv. Mater. 2021, 33, e2103320. [Google Scholar] [CrossRef]
- Kim, S.; Jung, Y.; Oh, S.; Moon, H.; Lim, H. Parasitic Capacitance-Free Flexible Tactile Sensor with a Real-Contact Trigger. Soft Robot. 2022, 9, 119–127. [Google Scholar] [CrossRef]
- Wang, Y.C.; Xi, K.L.; Liang, G.H.; Mei, M.G.; Chen, Z.C. A Flexible Capacitive Tactile Sensor Array for Prosthetic Hand Real-Time Contact Force Measurement. In Proceedings of the 2014 IEEE International Conference on Information and Automation (ICIA), Hailar, China, 28–30 July 2014; pp. 937–942. [Google Scholar]
- Zhou, Q.; Ji, B.; Wei, Y.Z.; Hu, B.; Gao, Y.B.; Xu, Q.S.; Zhou, J.; Zhou, B.P. A bio-inspired cilia array as the dielectric layer for flexible capacitive pressure sensors with high sensitivity and a broad detection range. J. Mater. Chem. A 2019, 7, 27334–27346. [Google Scholar] [CrossRef]
- Tang, Y.F.; Zheng, Q.F.; Chen, B.; Ma, Z.Q.; Gong, S.Q. A new class of flexible nanogenerators consisting of porous aerogel films driven by mechanoradicals. Nano Energy 2017, 38, 401–411. [Google Scholar] [CrossRef]
- Xie, Y.N.; Wang, S.H.; Niu, S.M.; Lin, L.; Jing, Q.S.; Yang, J.; Wu, Z.Y.; Wang, Z.L. Grating-Structured Freestanding Triboelectric-Layer Nanogenerator for Harvesting Mechanical Energy at 85% Total Conversion Efficiency. Adv. Mater. 2014, 26, 6599–6607. [Google Scholar] [CrossRef] [PubMed]
- Zhu, G.; Chen, J.; Zhang, T.; Jing, Q.; Wang, Z.L. Radial-arrayed rotary electrification for high performance triboelectric generator. Nat. Commun. 2014, 5, 3426. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, K.K.; Zhao, Y.; Sun, X.P.; Yuan, Z.Q.; Zheng, G.Q.; Dai, K.; Mi, L.W.; Pan, C.F.; Liu, C.T.; Shen, C.Y. Ultra-stretchable triboelectric nanogenerator as high-sensitive and self-powered electronic skins for energy harvesting and tactile sensing. Nano Energy 2020, 70, 104546. [Google Scholar] [CrossRef]
- Lin, W.; Wang, B.; Peng, G.; Shan, Y.; Hu, H.; Yang, Z. Skin-Inspired Piezoelectric Tactile Sensor Array with Crosstalk-Free Row+Column Electrodes for Spatiotemporally Distinguishing Diverse Stimuli. Adv. Sci. 2021, 8, 2002817. [Google Scholar] [CrossRef]
- Liu, Q.; Jin, L.; Zhang, P.; Zhang, B.; Li, Y.; Xie, S.; Li, X. Nanofibrous Grids Assembled Orthogonally from Direct-Written Piezoelectric Fibers as Self-Powered Tactile Sensors. ACS Appl. Mater. Interfaces 2021, 13, 10623–10631. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.T.; Yu, P.; Gu, C.X.; Cheng, X.Y.; Fu, X. Fingertip Piezoelectric Tactile Sensor Array for Roughness Encoding Under Varying Scanning Velocity. IEEE Sens. J. 2017, 17, 6867–6879. [Google Scholar] [CrossRef]
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible Piezoelectric Tactile Sensor Array for Dynamic Three-Axis Force Measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef] [Green Version]
- Li, L.Q.; He, R.J.; Soares, M.S.; Savovic, S.; Hu, X.H.; Marques, C.; Min, R.; Li, X.L. Embedded FBG-Based Sensor for Joint Movement Monitoring. IEEE Sens. J. 2021, 21, 26793–26798. [Google Scholar] [CrossRef]
- Min, R.; Hu, X.; Pereira, L.; Simone Soares, M.; Silva, L.C.B.; Wang, G.; Martins, L.; Qu, H.; Antunes, P.; Marques, C.; et al. Polymer optical fiber for monitoring human physiological and body function: A comprehensive review on mechanisms, materials, and applications. Opt. Laser Technol. 2022, 147, 107626. [Google Scholar] [CrossRef]
- Liu, S.; Shah, D.S.; Kramer-Bottiglio, R. Highly stretchable multilayer electronic circuits using biphasic gallium-indium. Nat. Mater. 2021, 20, 851–858. [Google Scholar] [CrossRef]
- Wang, M.; Wang, K.; Ma, C.; Uzabakiriho, P.C.; Chen, X.; Zhao, G. Mechanical Gradients Enable Highly Stretchable Electronics Based on Nanofiber Substrates. ACS Appl. Mater. Interfaces 2022, 14, 35997–36006. [Google Scholar] [CrossRef] [PubMed]
- Tang, L.; Shang, J.; Jiang, X. Multilayered electronic transfer tattoo that can enable the crease amplification effect. Sci. Adv. 2021, 7, eabe3778. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.Y.; Nithyanandam, P.; Kanetkar, S.; Kwon, K.Y.; Ma, J.W.; Im, S.; Oh, J.H.; Shamsi, M.; Wilkins, M.; Daniele, M.; et al. Liquid Metal Coated Textiles with Autonomous Electrical Healing and Antibacterial Properties. Adv. Mater. Technol. 2023, 8, 2202183. [Google Scholar] [CrossRef]
- Song, J.; Tan, Y.; Chu, Z.; Xiao, M.; Li, G.; Jiang, Z.; Wang, J.; Hu, T. Hierarchical Reduced Graphene Oxide Ridges for Stretchable, Wearable, and Washable Strain Sensors. ACS Appl. Mater. Interfaces 2019, 11, 1283–1293. [Google Scholar] [CrossRef] [PubMed]
- Suh, D.; Faseela, K.P.; Kim, W.; Park, C.; Lim, J.G.; Seo, S.; Kim, M.K.; Moon, H.; Baik, S. Electron tunneling of hierarchically structured silver nanosatellite particles for highly conductive healable nanocomposites. Nat. Commun. 2020, 11, 2252. [Google Scholar] [CrossRef]
- Luo, Y.; Li, Y.; Sharma, P.; Shou, W.; Wu, K.; Foshey, M.; Li, B.; Palacios, T.; Torralba, A.; Matusik, W. Learning human–environment interactions using conformal tactile textiles. Nat. Electron. 2021, 4, 193–201. [Google Scholar] [CrossRef]
- Liu, C.; Sun, Y.; Liu, P.; Ma, F.; Wu, S.; Li, J.; Li, S.; Hu, R.; Wang, Z.; Wang, Y.; et al. Fabrication and characterization of highly sensitive flexible strain sensor based on biodegradable gelatin nanocomposites and double strain layered structures with crack for gesture recognition. Int. J. Biol. Macromol. 2023, 231, 123568. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Advantages | Limitations |
|---|---|---|
| RLC Resonant Sensing |
|
|
| Transmission Line Sensing |
|
|
| Ionic Conductor Sensing |
|
|
| Triboelectric Sensing |
|
|
| Piezoresistive Sensing |
|
|
| Distributed Fiber Optic Sensing |
|
|
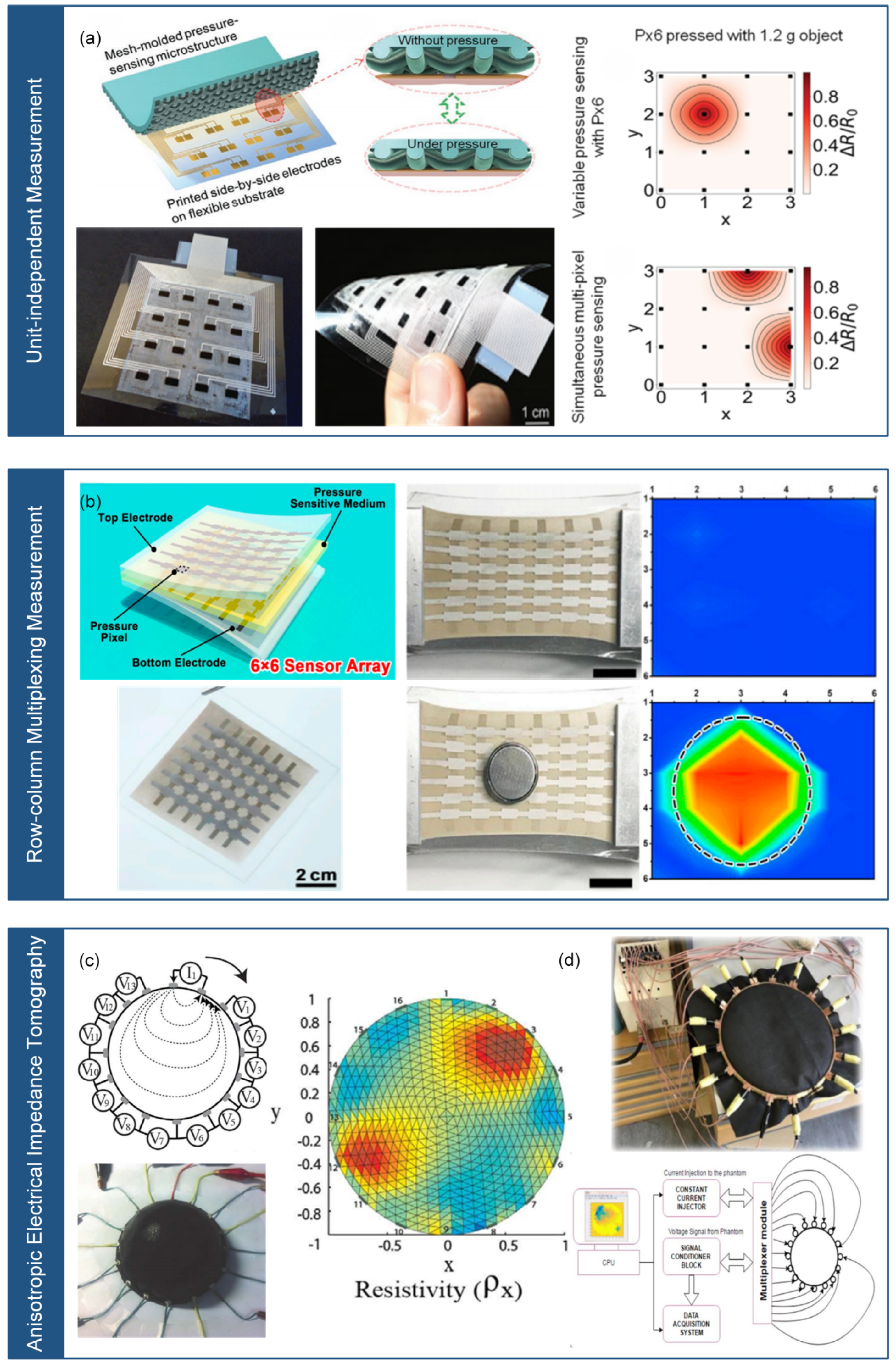
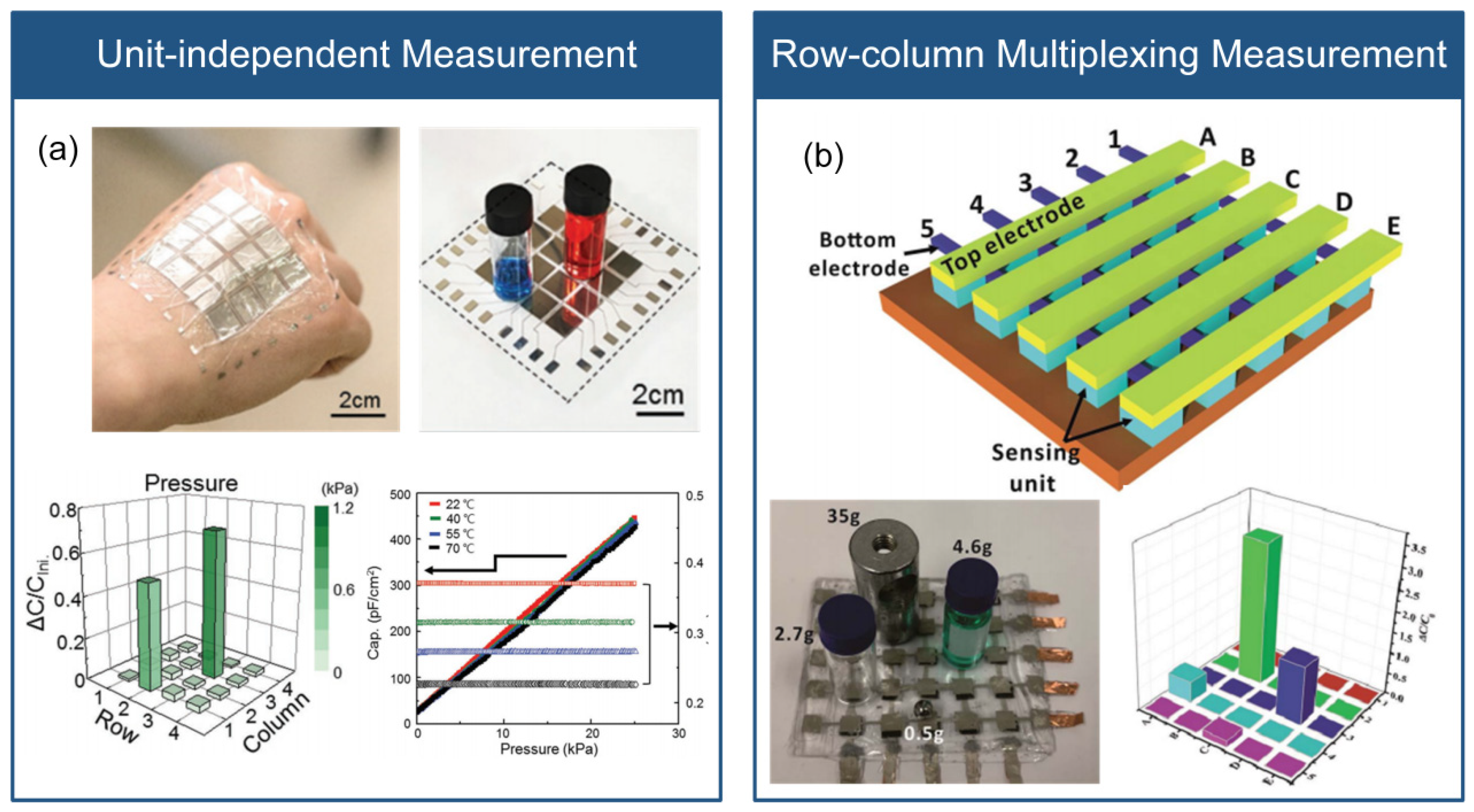
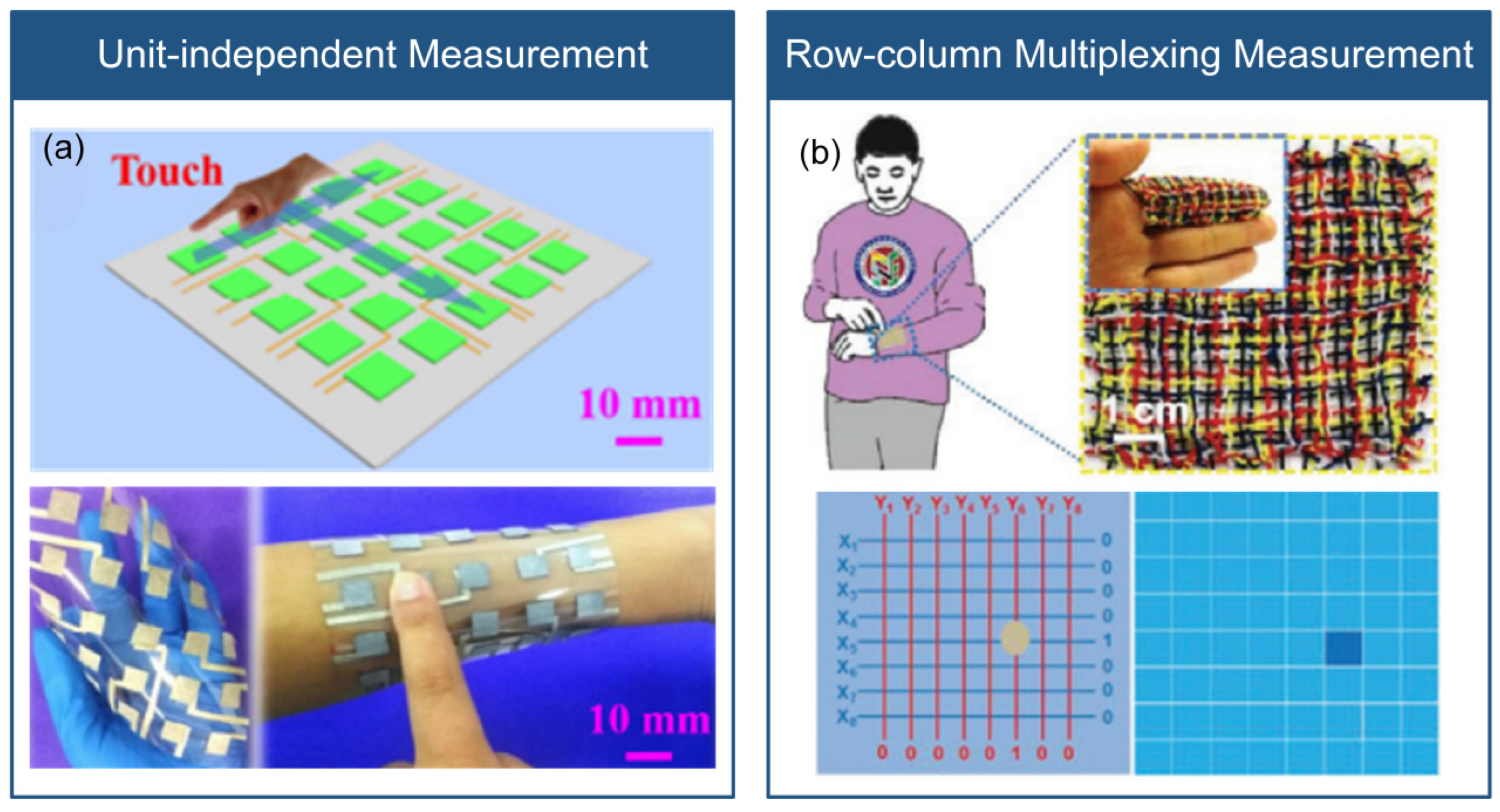
| Unit-Independent Measurement |
|
|
| Row–Column Multiplexed Measurement |
|
|
| Anisotropic Electrical Impedance Tomography |
|
|
| Shared Electrode Measurement |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, J.; Chen, Y.; Liu, S.; Liu, C.; Ma, T.; Luo, Z.; Ge, G. Single-Line Multi-Channel Flexible Stress Sensor Arrays. Micromachines 2023, 14, 1554. https://doi.org/10.3390/mi14081554
Yang J, Chen Y, Liu S, Liu C, Ma T, Luo Z, Ge G. Single-Line Multi-Channel Flexible Stress Sensor Arrays. Micromachines. 2023; 14(8):1554. https://doi.org/10.3390/mi14081554
Chicago/Turabian StyleYang, Jiayi, Yuanyuan Chen, Shuoyan Liu, Chang Liu, Tian Ma, Zhenmin Luo, and Gang Ge. 2023. "Single-Line Multi-Channel Flexible Stress Sensor Arrays" Micromachines 14, no. 8: 1554. https://doi.org/10.3390/mi14081554