
A Low-Noise Interface ASIC for MEMS Disk Resonator Gyroscope

 ,
,
Abstract
:1. Introduction
2. System Overview
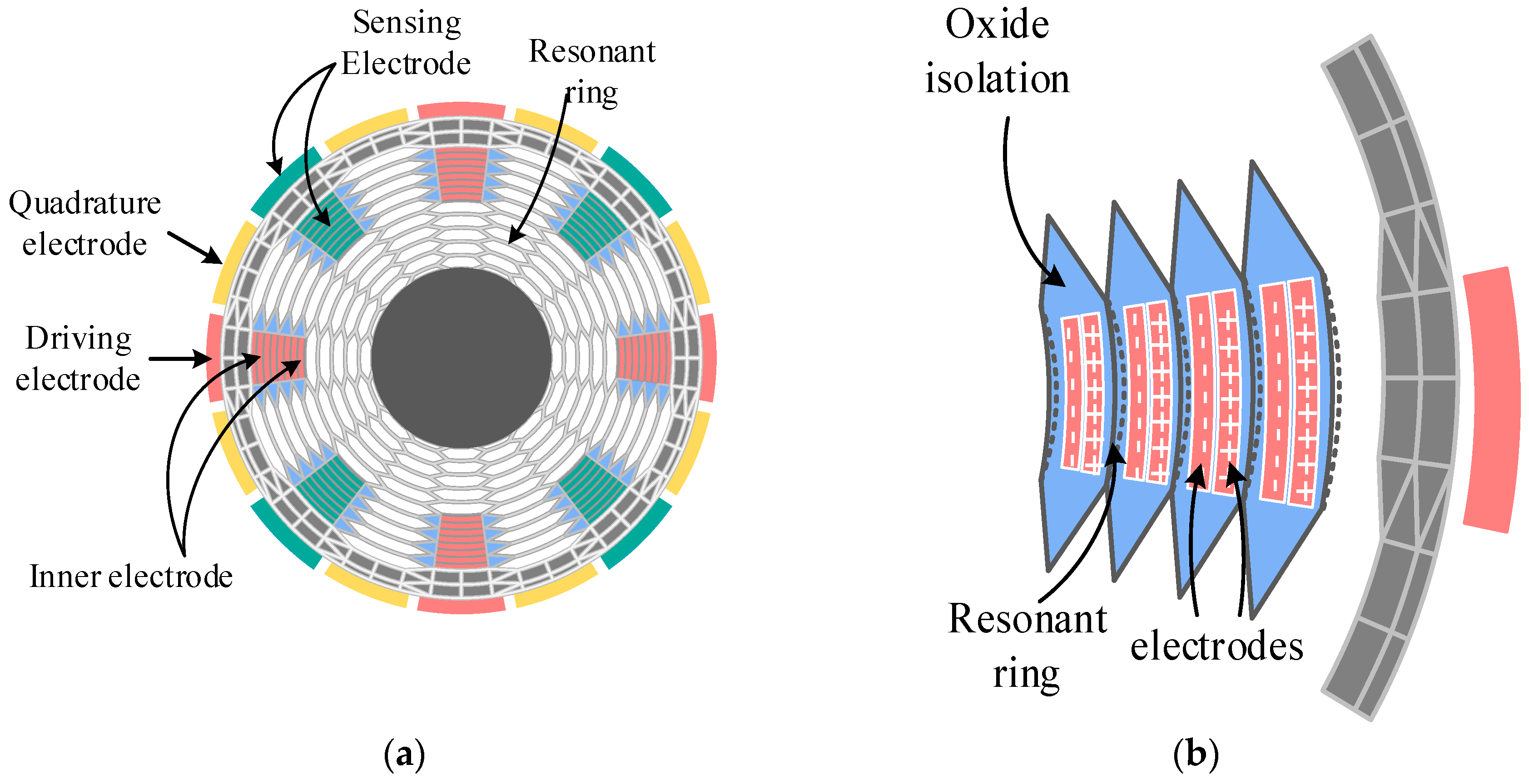
2.1. MEMS DRG Structure
2.1.1. High-Quality Factor (Q)
2.1.2. Large Oscillation Amplitude
2.1.3. Fully Symmetrical Structure
2.1.4. Abundant Electrodes
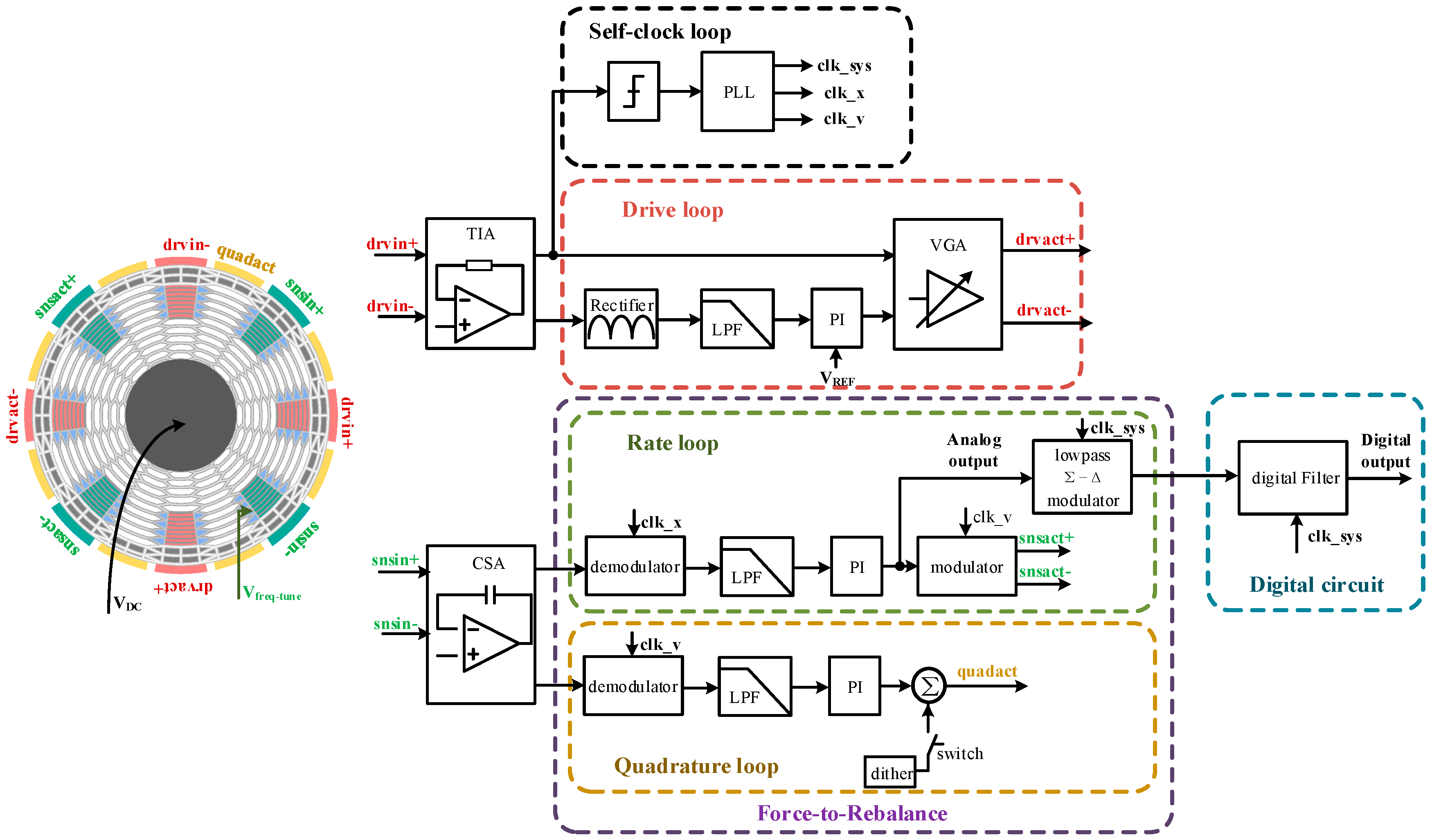
2.2. MEMS DRG System Architecture
3. Noise Analysis of MEMS DRG System
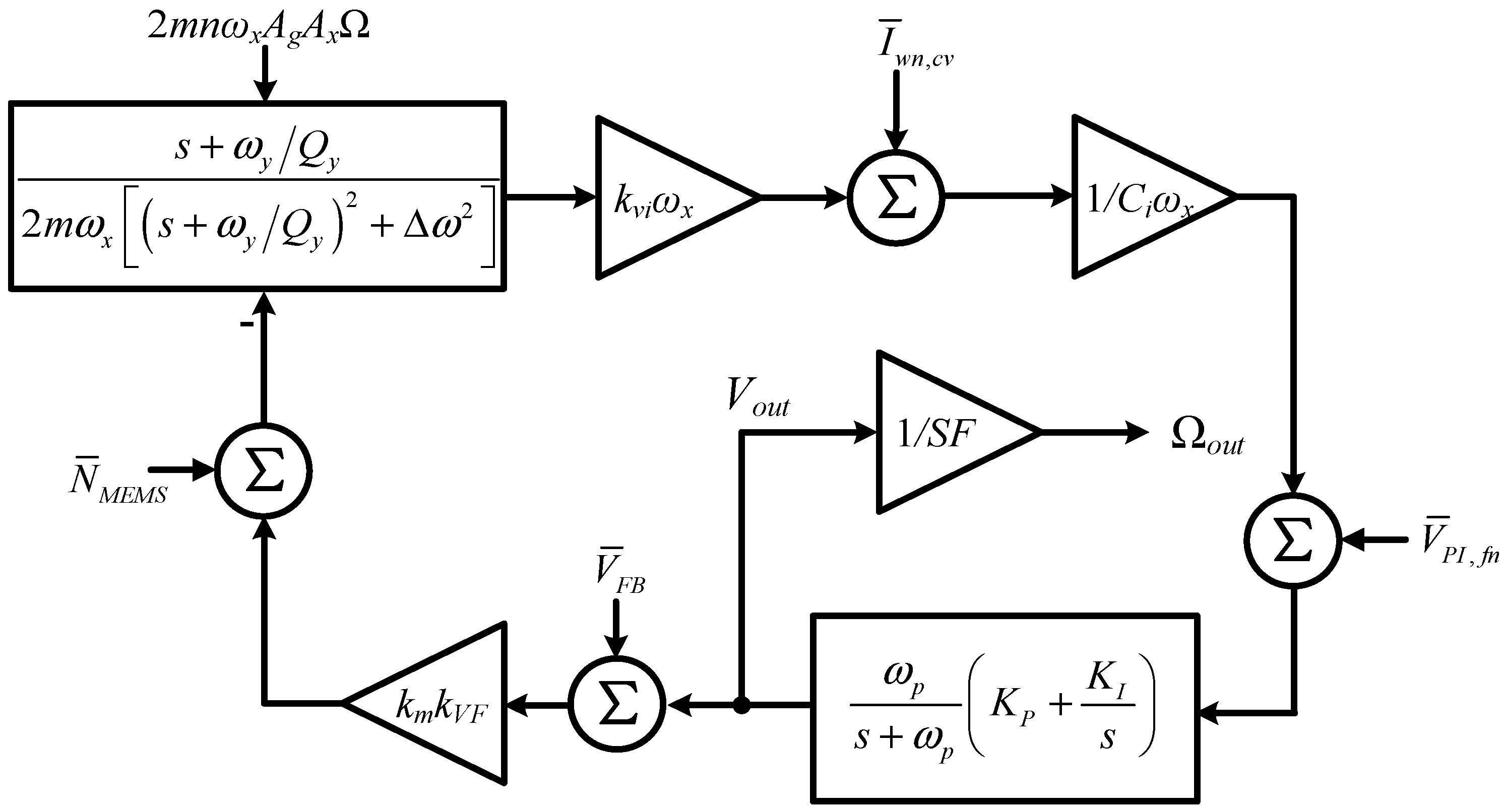
3.1. Slow Signal Equivalence of the DRG Dynamics
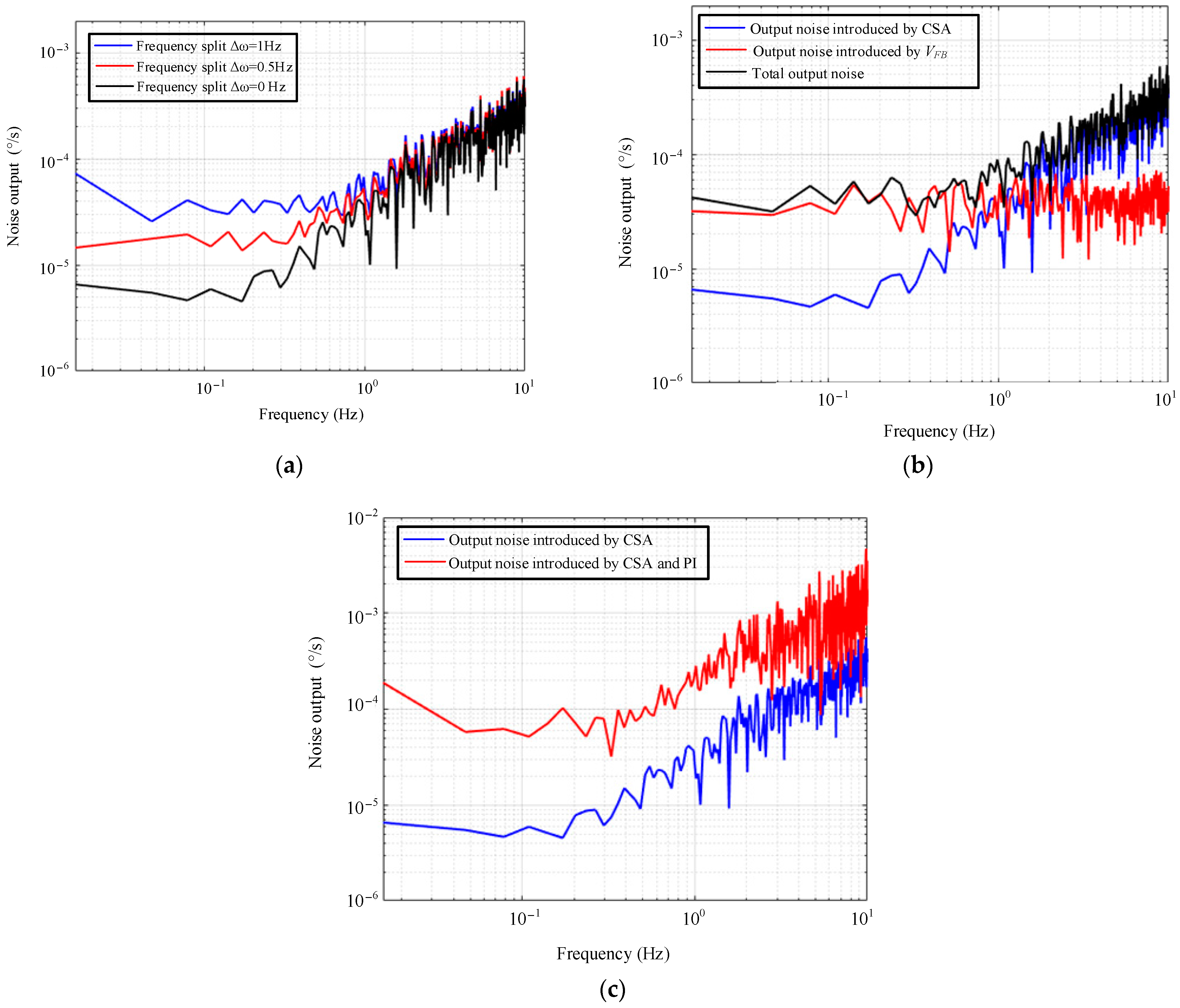
3.2. Noise Analysis in the System
3.3. Angle Random Walk Analysis and Optimization
4. Circuit Implementation Details
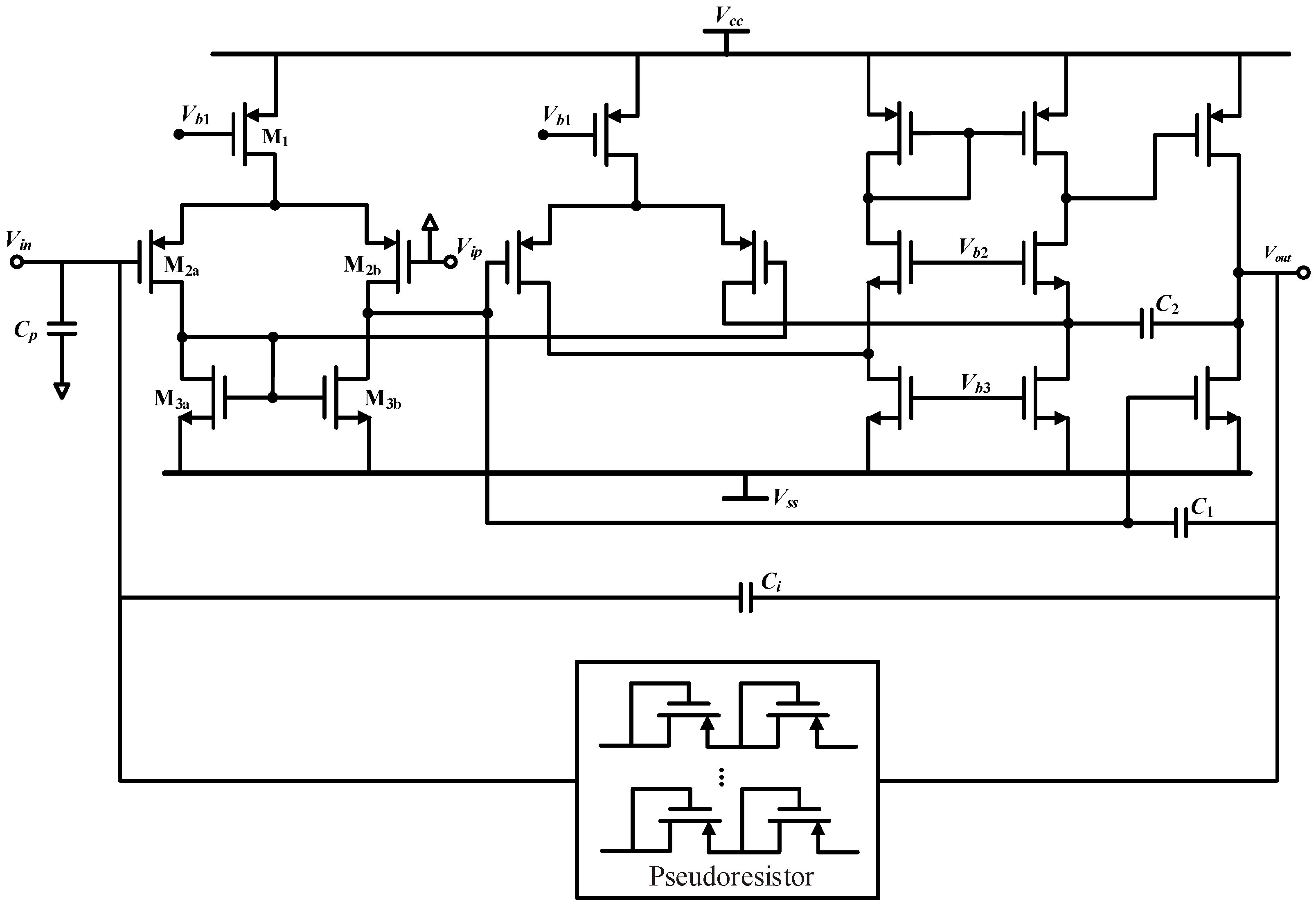
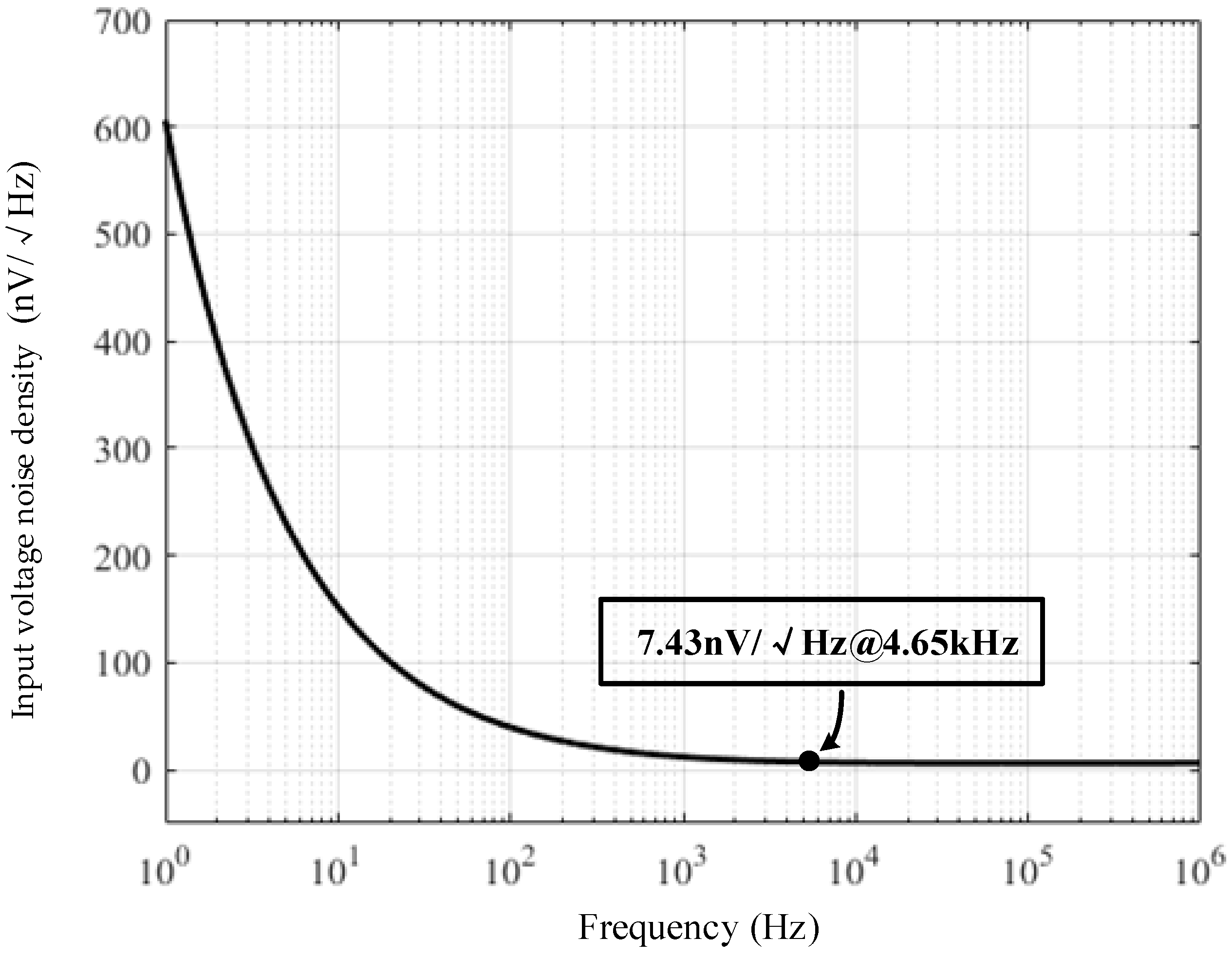
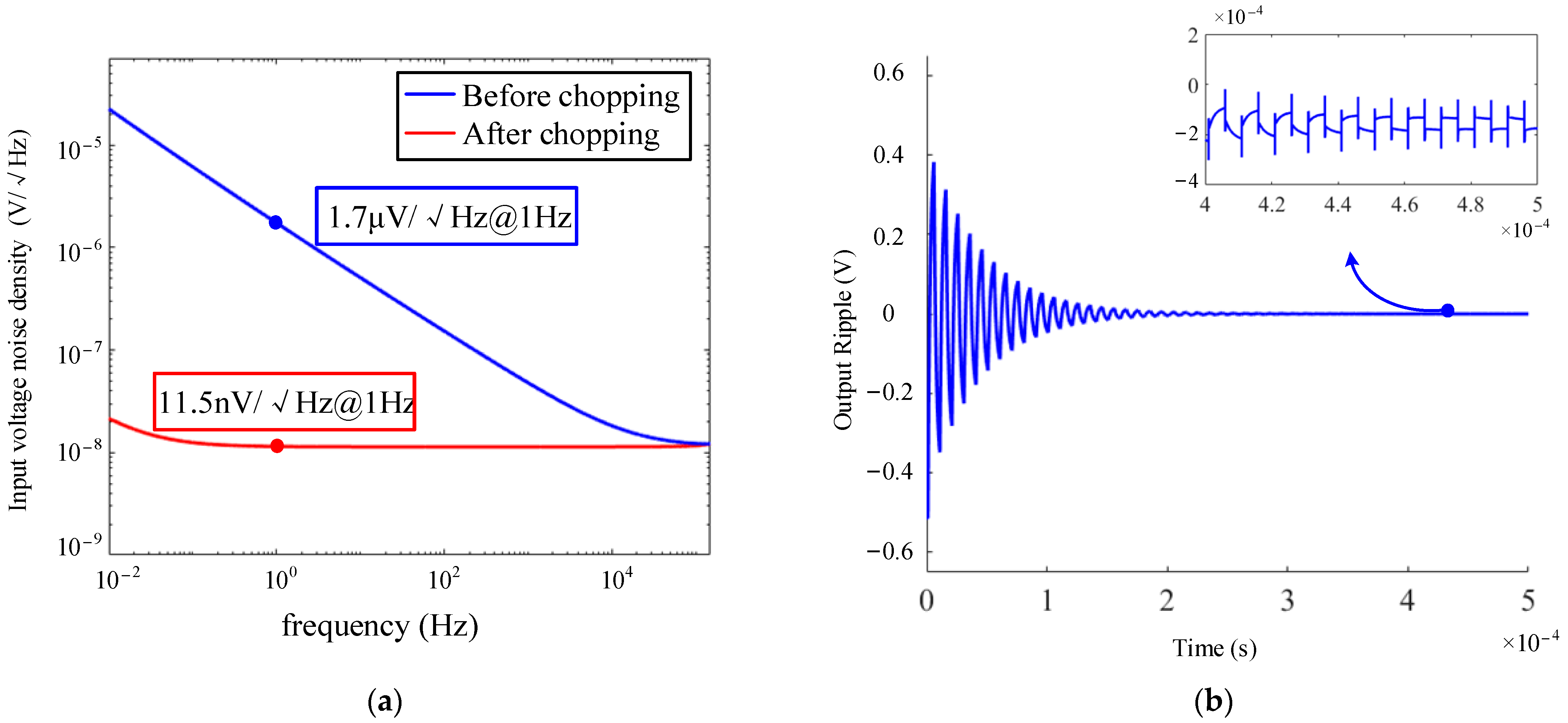
4.1. Current Sensing Amplifier
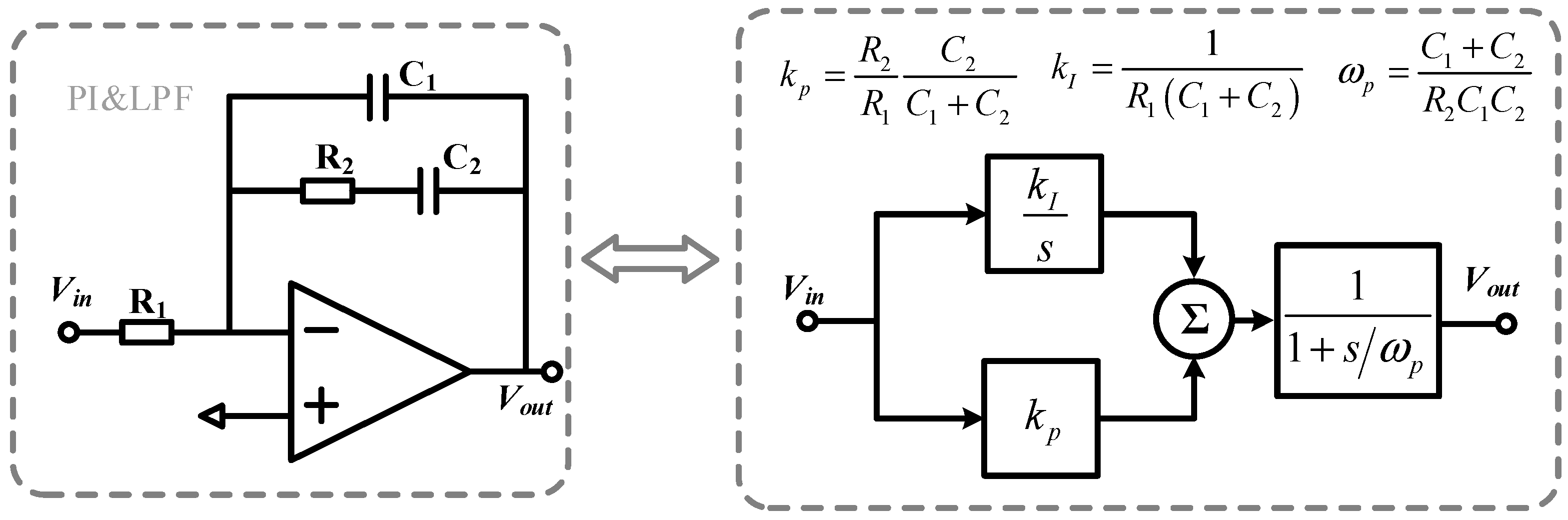
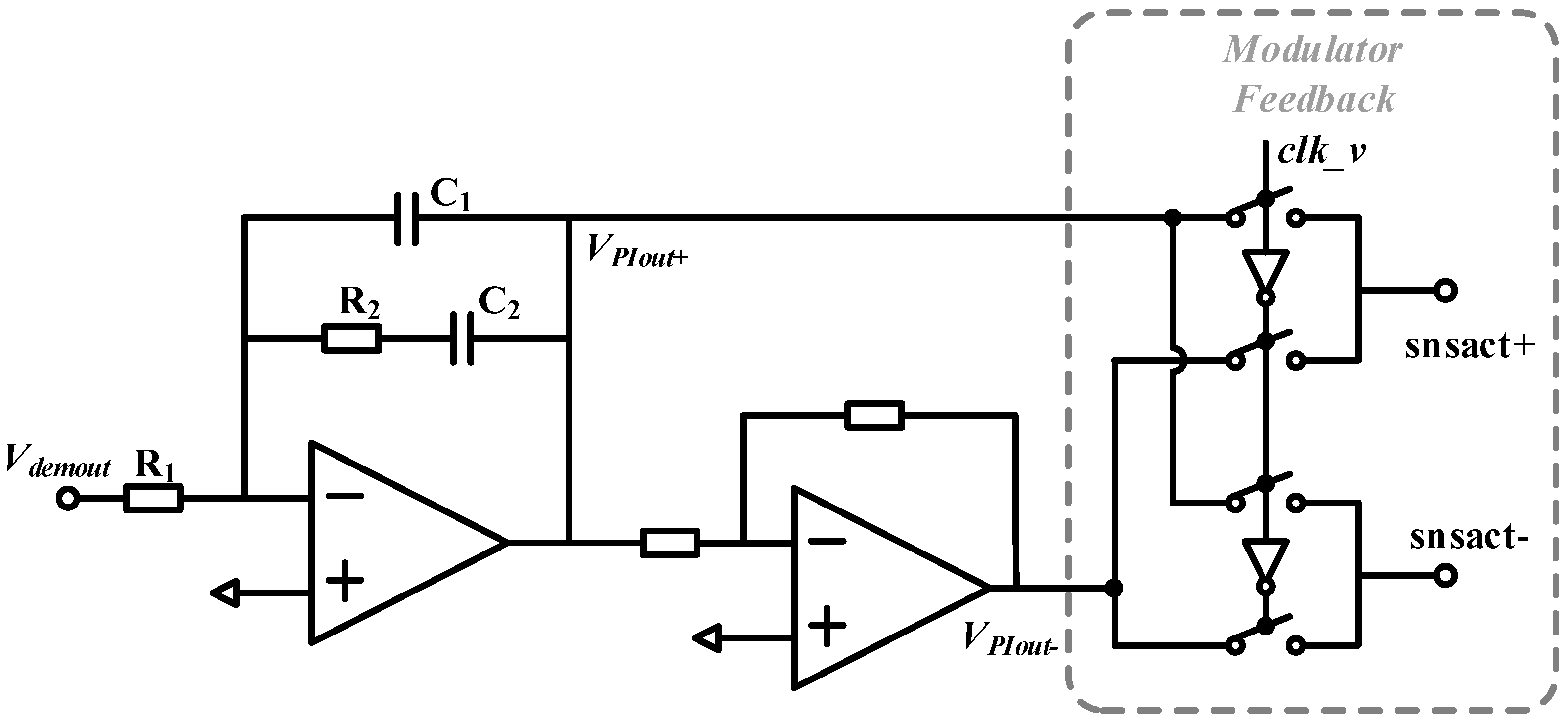
4.2. Amplifier in PI Controller
4.3. Feedback Element
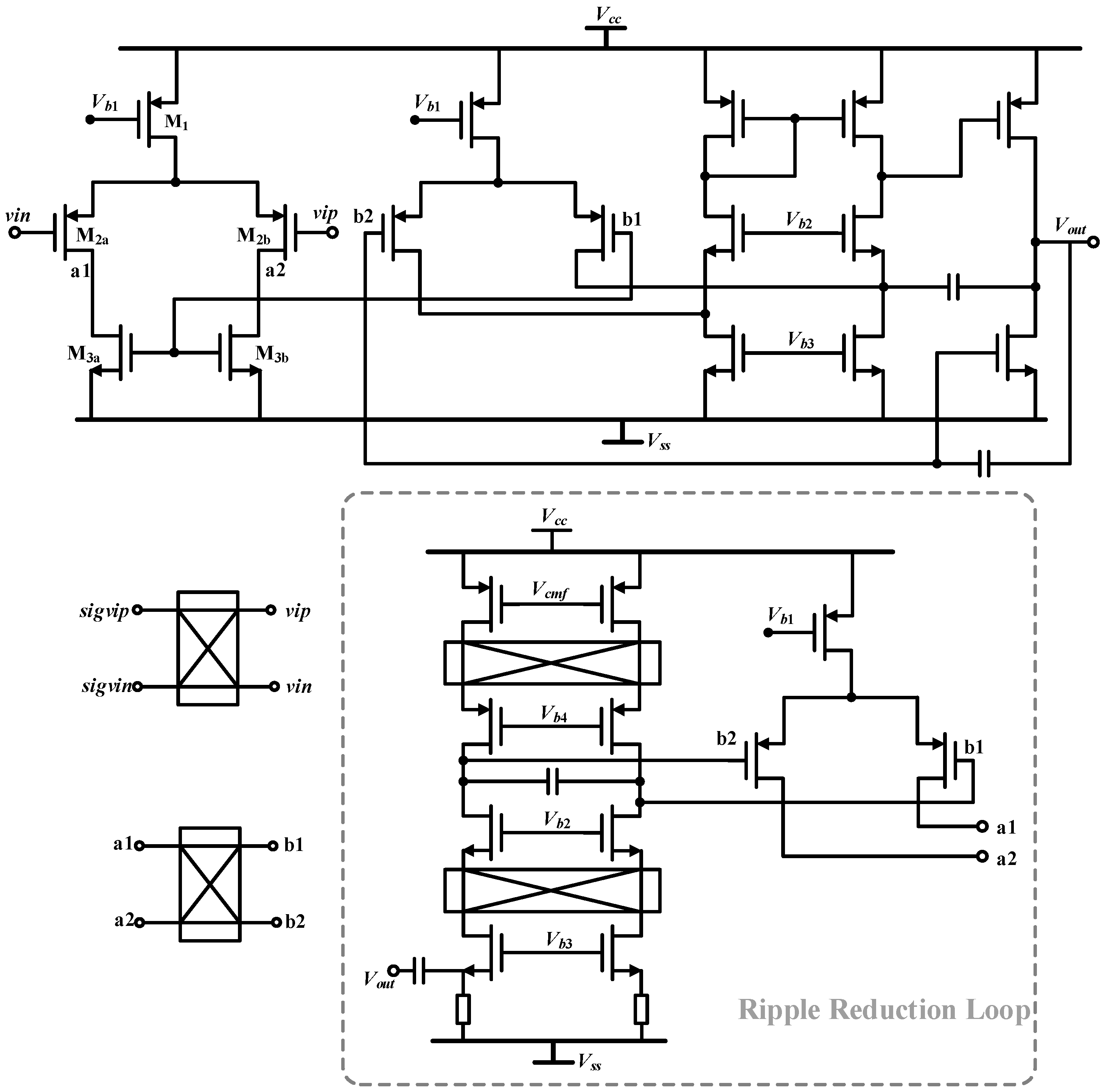
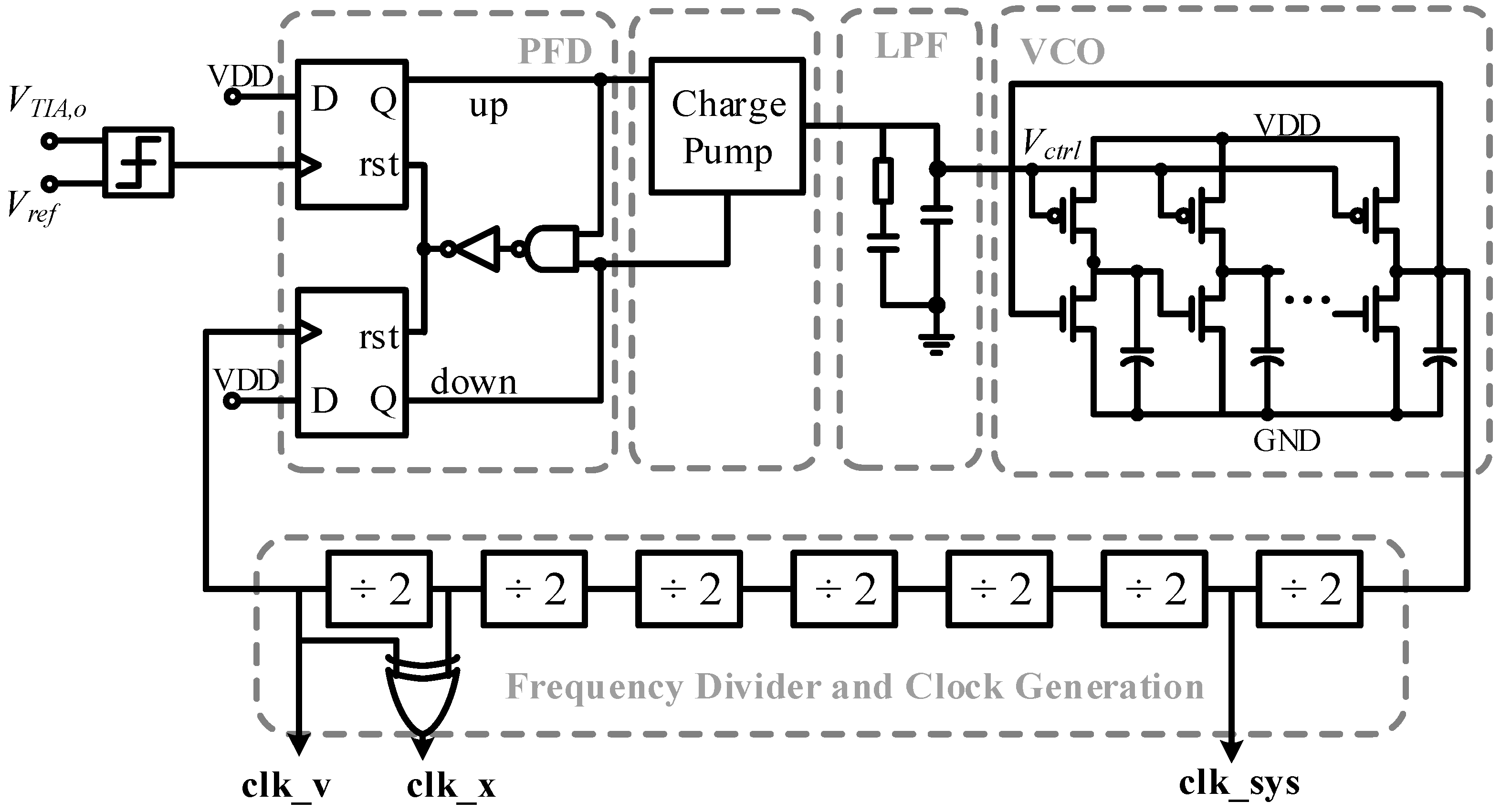
4.4. Other Circuit Elements
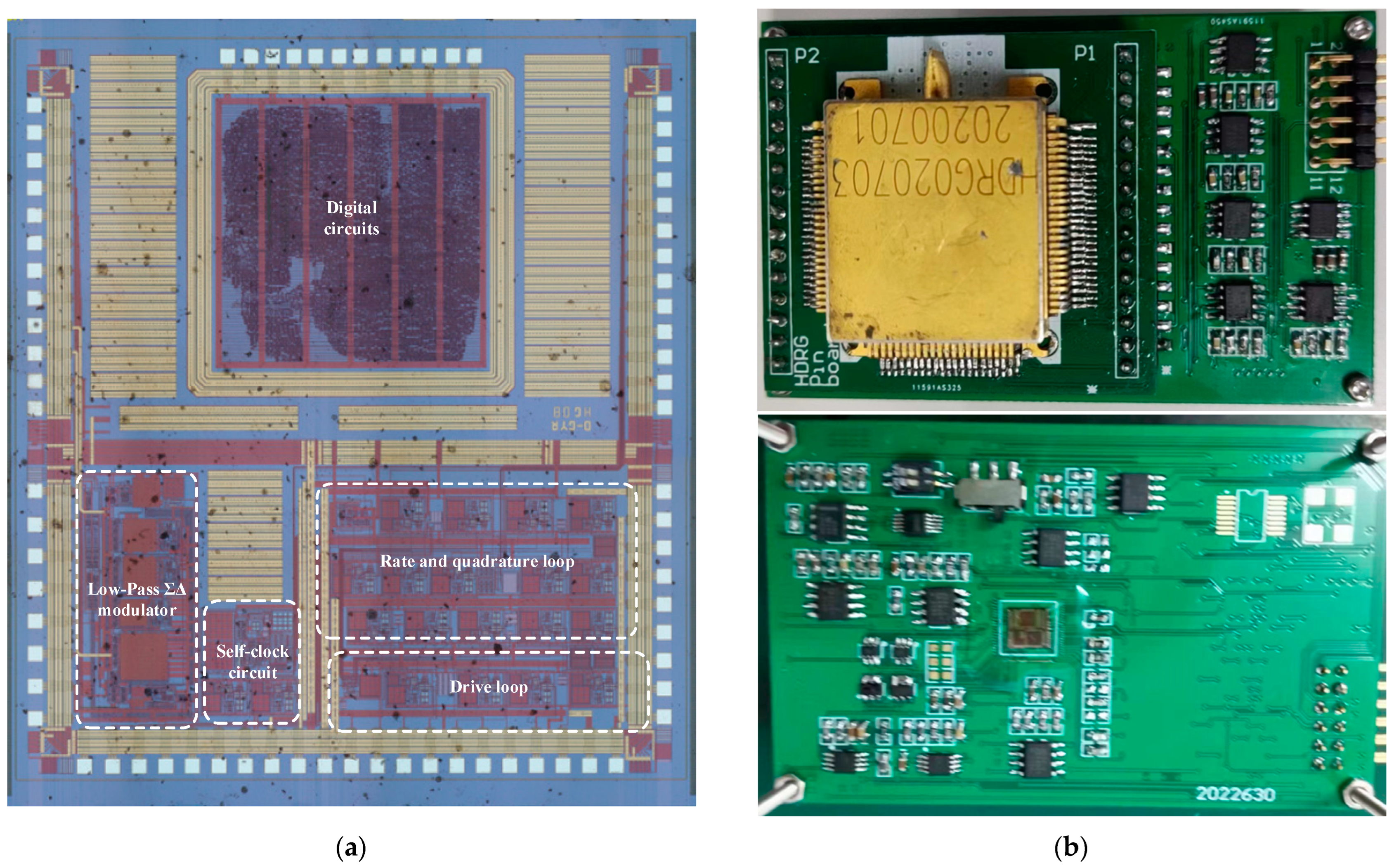
5. Experimental Results and Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Langfelder, G.; Bestetti, M.; Gadola, M. Silicon MEMS inertial sensors evolution over a quarter century. J. Micromech. Microeng. 2021, 31, 084002. [Google Scholar] [CrossRef]
- Scalera, G.M.; Ferrarin, M.; Rabuffetti, M. Gait regularity assessed by wearable sensors: Comparison between accelerometer and gyroscope data for different sensor locations and walking speeds in healthy subjects. J. Biomech. 2020, 113, 110115. [Google Scholar] [CrossRef] [PubMed]
- Finkbeiner, S. MEMS for automotive and consumer electronics. In Proceedings of the 2013 European Solid-State Device Research Conference, Bucharest, Romania, 16–20 September 2013. [Google Scholar]
- Challoner, A.D.; Ge, H.H.; Liu, J.Y. Boeing Disc Resonator Gyroscope. In Proceedings of the IEEE/ION Position, Location Navigation Symposium-PLANS, EI Segundo, CA, USA, 5–8 May 2014. [Google Scholar]
- Xu, Y.; Li, Q.S.; Wang, P.; Zhang, Y.M.; Zhou, X.; Yu, L.; Wu, X.Z.; Xiao, D.B. 0.015 Degree-Per-Hour Honeycomb Disk Resonator Gyroscope. IEEE Sens. J. 2021, 21, 7326–7338. [Google Scholar] [CrossRef]
- Endean, D.; Christ, K.; Duffy, P.; Freeman, E.; Glenn, M.; Gnerlich, M.; Johnson, B.; Weinmann, J. Near-navigation grade tuning fork MEMS gyroscope. In Proceedings of the IEEE International Symposium on Inertial Sensors and Systems, Naples, FL, USA, 1 April 2019. [Google Scholar]
- Gadola, M.; Buffoli, A.; Sansa, M.; Berthelot, A.; Robert, P.; Langfelder, G. 1.3 mm (2) Nav-Grade NEMS-Based Gyroscope. J. Microelectromech. Syst. 2016, 30, 513–520. [Google Scholar] [CrossRef]
- Koenig, S.; Rombach, S.; Gutmann, W.; Jaeckle, A.; Weber, C.; Ruf, M.; Grolle, D.; Rende, J. Towards a navigation grade Si-MEMS gyroscope. In Proceedings of the DGON Inertial Sensors Systems (ISS), Braunschweig, Germany, 30 December 2019. [Google Scholar]
- Bowles, S.R.; Gallacher, B.J.; Hu, Z.X.; Fell, C.P.; Townsend, K. Control scheme to reduce the effect of structural imperfections in a rate integrating MEMS gyroscope. IEEE Sens. J. 2015, 15, 552–560. [Google Scholar] [CrossRef]
- Gando, R.; Ono, D.; Kaji, S.; Ota, H.; Itakura, T.; Tomizawa, Y. A compact microcontroller-based MEMS rate integrating gyroscope module with automatic asymmetry calibration. In Proceedings of the 2020 IEEE 33rd International Conference on Micro Electro Mechanical Systems, Vancouver, BC, Canada, 18–22 January 2020. [Google Scholar]
- Hiller, T.; Pentek, Z.; Liewald, J.-T.; Buhmann, A.; Roth, H. Origins and Mechanisms of Bias Instability Noise in a Three-Axis Mode-Matched MEMS Gyroscope. J. Microelectromech. Syst. 2019, 28, 586–596. [Google Scholar] [CrossRef]
- Hiller, T.; Kuhlmann, B.; Buhmann, A.; Roth, H. Noise contributions in a closed-loop MEMS gyroscope for automotive applications. In Proceedings of the 2017 IEEE International Symposium on Inertial Sensors and Systems, Kauai, HI, USA, 27–30 March 2017. [Google Scholar]
- Leland, R.P. Mechanical-thermal noise in MEMS gyroscopes. IEEE Sens. J. 2005, 5, 493–500. [Google Scholar] [CrossRef]
- Li, Q.S.; Xiao, D.B.; Zhou, X.; Xu, Y.; Zhuo, M.; Hou, Z.G.; He, K.X.; Zhang, Y.M.; Wu, X.Z. 0.04 degree-per-hour MEMS disk resonator gyroscope with high-quality factor (510 k) and long decaying time constant (74.9 s). Microsyst. Nanoeng. 2018, 4, 32. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.S.; Xiao, D.B.; Xu, Y.; Zhuo, M.; Zhou, X.; Zhang, Y.M.; Yu, L.; Wu, X.Z. Nonlinearity Reduction in Disk Resonator Gyroscopes Based on the Vibration Amplification Effect. IEEE T Ind. Electron. 2020, 67, 6946–6954. [Google Scholar] [CrossRef]
- Xiao, D.B.; Xin, Z.; Li, Q.S.; Hou, Z.Q.; Wu, Y.L.; Wang, X.H.; Zhang, J.Y.; Wu, X.Z. Honeycomb-like disk resonator with high immunity to fabrication error for gyroscopic application. In Proceedings of the 2017 IEEE 30th International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, USA, 22–26 January 2017. [Google Scholar]
- Omar, A.; Elshennawy, A.; Ismail, A. Analysis and Simulation of Phase Errors in Quadrature Cancellation Techniques for MEMS Capacitive Gyroscopes. In Proceedings of the 2018 DGON Inertial Sensors and Systems, Braunschweig, Germany, 11–12 September 2018. [Google Scholar]
- Roberts, J.B.; Spanos, P.D. Stochastic averaging: An approximate method of solving random vibration problems. Int. J. Non-Linear Mech. 1986, 21, 111–134. [Google Scholar] [CrossRef]
- Wang, Q.Y.; Chen, W.P.; Yin, L.; Liu, X.W.; Zhou, Z.P. Equivalent electrical model for quartz vibrating gyroscope. In Proceedings of the 2012 International Conference on Optoelectronics and Microelectronics, Changchun, China, 23–25 August 2012. [Google Scholar]
- Keshner, M.S. 1/f noise. Proc. IEEE 1982, 70, 212–218. [Google Scholar] [CrossRef]
- IEEE Std 952-2020 (Revision of IEEE Std 952-1997); IEEE Standard for Specifying and Testing Single-Axis Interferometric Fiber Optic Gyros. IEEE: Piscataway, NJ, USA, 2021; pp. 1–93. [CrossRef]
- Prikhodko, I.P.; Gregory, J.A.; Clark, W.A.; Geen, J.A.; Judy, M.W.; Ahn, C.H.; Kenny, T.W. Mode-Matched MEMS Coriolis Vibratory Gyroscopes: Myth or Reality? In Proceedings of the 2016 IEEE/Ion Position, Location and Navigation Symposium, Savannah, GA, USA, 11–14 April 2016. [Google Scholar]
- Peng, X.H.; Sansen, W. Transconductance with capacitances feedback compensation for multistage amplifiers. IEEE J. Solid-State Circuits 2005, 40, 1514–1520. [Google Scholar] [CrossRef]
- Wu, R.; Makinwa, K.A.A.; Huijsing, J.H. A Chopper Current-Feedback Instrumentation Amplifier With a 1 mHz 1/f Noise Corner and an AC-Coupled Ripple Reduction Loop. IEEE J. Solid-State Circuits 2009, 44, 3232–3243. [Google Scholar] [CrossRef] [Green Version]
- Han, G.; Sanchez-Sinencio, E. CMOS transconductance multipliers: A tutorial. IEEE Trans. Circuits-II 1998, 45, 1550–1563. [Google Scholar]
- Taherinejad, N.; Shah-Hosseini, H.S. A new digital multiplier/divider architecture, via hybrid analog-digital processing. In Proceedings of the 2008 15th International Conference on Mixed Design of Integrated Circuits and Systems, Poznan, Poland, 19–21 June 2008. [Google Scholar]
- Lv, R.S.; Fu, Q.; Yin, L.; Gao, Y.; Bai, W.; Zhang, W.B.; Zhang, Y.F.; Chen, W.P.; Liu, X.W. An Interface ASIC for MEMS Vibratory Gyroscopes with Nonlinear Driving Control. Micromachines 2019, 10, 270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lv, R.S.; Chen, W.P.; Yin, L.; Fu, Q.; Liu, X.W.; Yan, J.M. A closed-loop Sigma Delta modulator for micromechanical capacitive sensors. IEICE Electron. Express 2018, 15, 20171112. [Google Scholar] [CrossRef] [Green Version]
- Su, T.-H.; Nitzan, S.H.; Taheri-Tehrani, P.; Kline, M.H.; Boser, B.E.; Horsley, D.A. Silicon MEMS Disk Resonator Gyroscope With an Integrated CMOS Analog Front-End. IEEE Sens. J. 2014, 14, 3426–3432. [Google Scholar] [CrossRef]
- Wang, H.; Quan, H.Y.; Zhou, J.Q.; Zhang, L.; Xie, J.B.; Chang, H.L. A wafer-level vacuum packaged mems disk resonator gyroscope with 0.42°/h bias instability within ±300°/s full scale. IEEE Trans. Ind. Electron. 2022, 69, 5304–5313. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Unit |
|---|---|---|
| Resonator diameter | 8 | mm |
| Beam width | 12 | μm |
| Gap width (d) | 11 | μm |
| Effective mass (m) | 2.54 × 10−6 | kg |
| Stiffness coefficient (k) | 2168.2 | N/m |
| Damping coefficient (D) | 1.769 × 10−7 | N/(m/s) |
| Resonant frequency (f) | 4650 | Hz |
| Quality factor (Q) | 5.1 × 105 | - |
| Mechanical bandwidth (ωm) | 0.0349 | rad/s |
| Oscillation amplitude (Ax) | 4 | μm |
| Year | Ref | Circuit Type | ARW °/√h | BI (°/h) | Full Scale (°/s) |
|---|---|---|---|---|---|
| 2014 | [4] | dSPACE platform | 0.003 | 0.01 | - |
| 2014 | [27] | PCB and CMOS front-end | 0.48 | 20 | - |
| 2016 | [20] | HF2LI | - | 4 | - |
| 2018 | [14] | Analog discrete circuit | 0.01 | 0.04 | ±100 |
| 2020 | [15] | HF2LI | 0.018 | 0.23 | ±20 |
| 2022 | [28] | PCB front-end and digital ASIC | 0.05 | 0.42 | ±300 |
| 2023 | This paper | ASIC | 0.0075 | 0.038 | ±50 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Yin, L.; Wang, Y.; Lv, R.; Zhang, H.; Chen, W.; Liu, X.; Fu, Q. A Low-Noise Interface ASIC for MEMS Disk Resonator Gyroscope. Micromachines 2023, 14, 1256. https://doi.org/10.3390/mi14061256
Zhang W, Yin L, Wang Y, Lv R, Zhang H, Chen W, Liu X, Fu Q. A Low-Noise Interface ASIC for MEMS Disk Resonator Gyroscope. Micromachines. 2023; 14(6):1256. https://doi.org/10.3390/mi14061256
Chicago/Turabian StyleZhang, Wenbo, Liang Yin, Yihang Wang, Risheng Lv, Haifeng Zhang, Weiping Chen, Xiaowei Liu, and Qiang Fu. 2023. "A Low-Noise Interface ASIC for MEMS Disk Resonator Gyroscope" Micromachines 14, no. 6: 1256. https://doi.org/10.3390/mi14061256