
Research on Pedestrian Indoor Positioning Based on Two-Step Robust Adaptive Cubature Kalman Filter with Smartphone MEMS Sensors
Abstract
:1. Introduction
2. Materials and Methods
2.1. Heading Estimation with the Quaternion
2.2. Cubature Kalman Filter Algorithm
- (1)
- Cubature Rule
- (2)
- Cubature Kalman Filter Algorithm Process
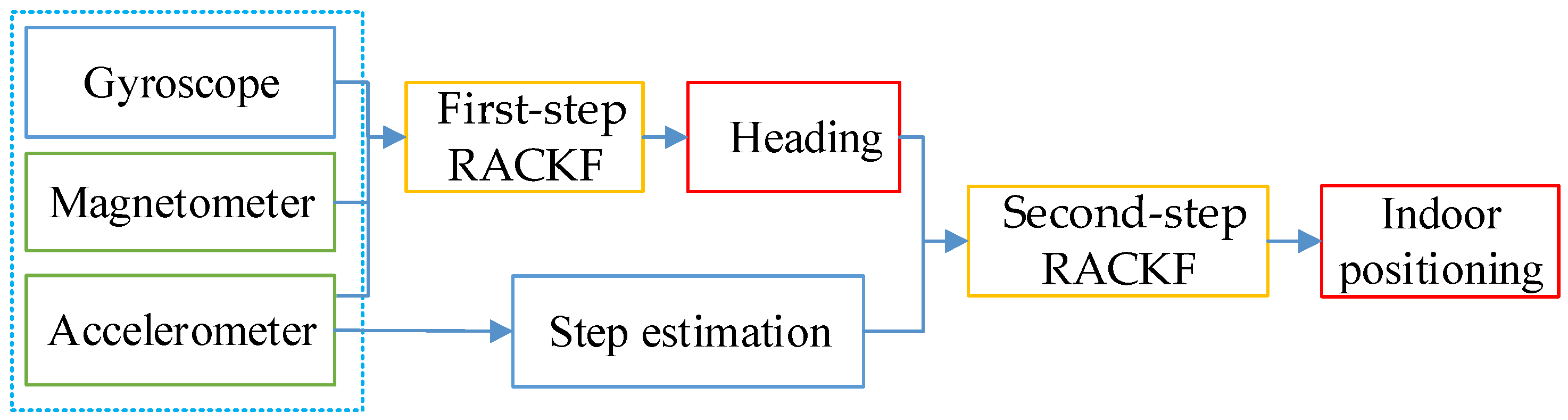
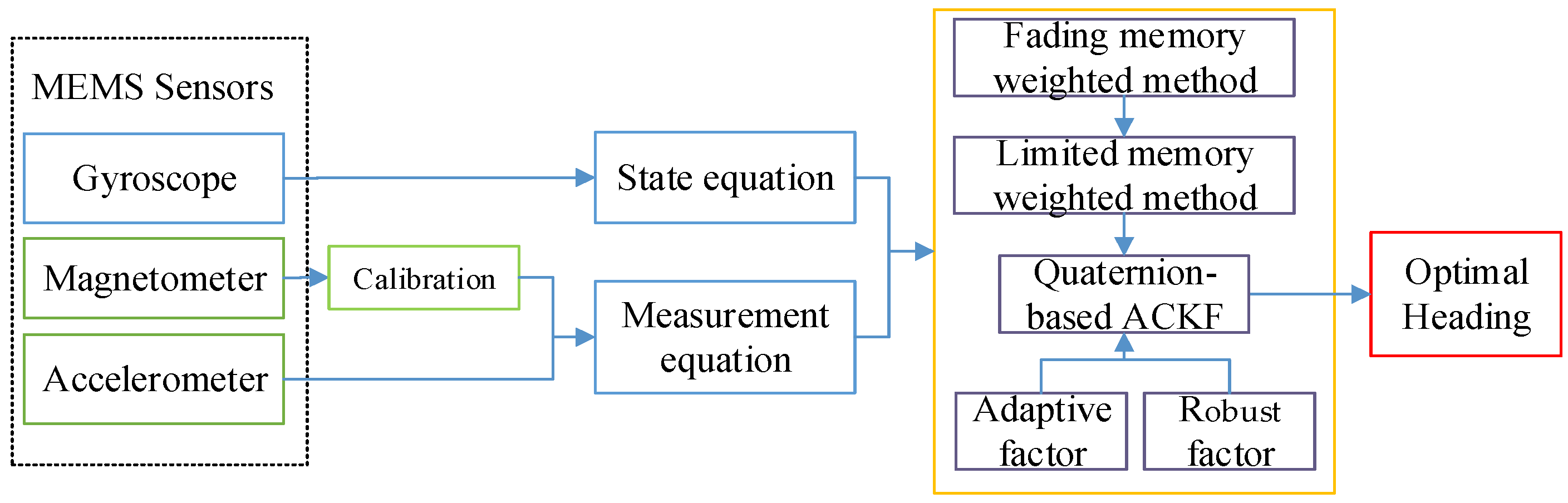
2.3. First Step RACKF Algorithm
2.3.1. State Equation Based on Gyroscope
2.3.2. Measurement Equation Based on Accelerometer and Magnetometer
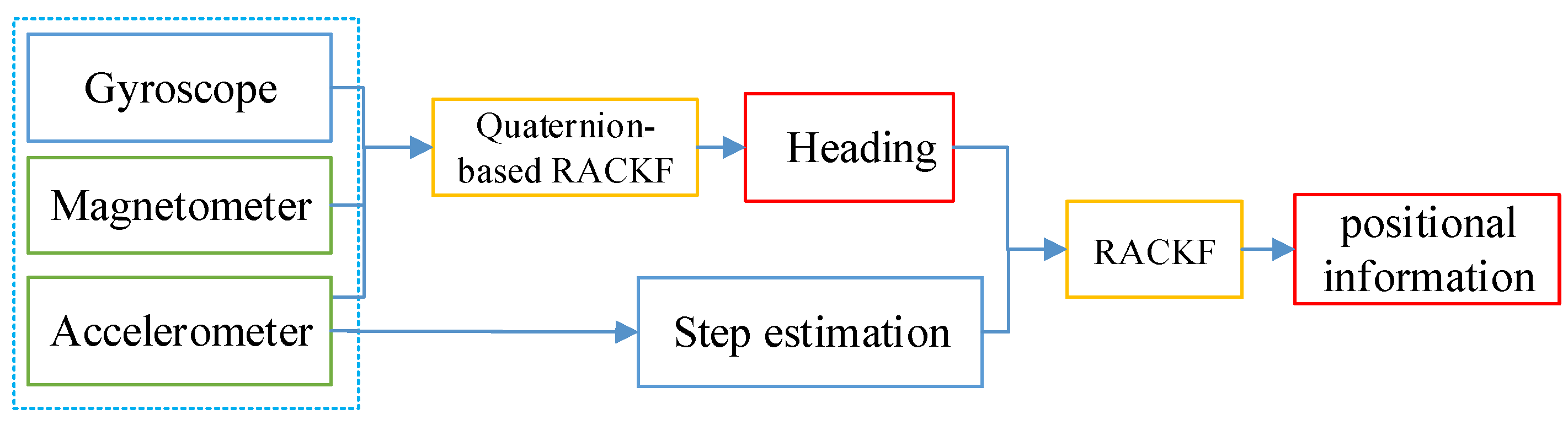
2.4. Second Step RACKF Algorithm
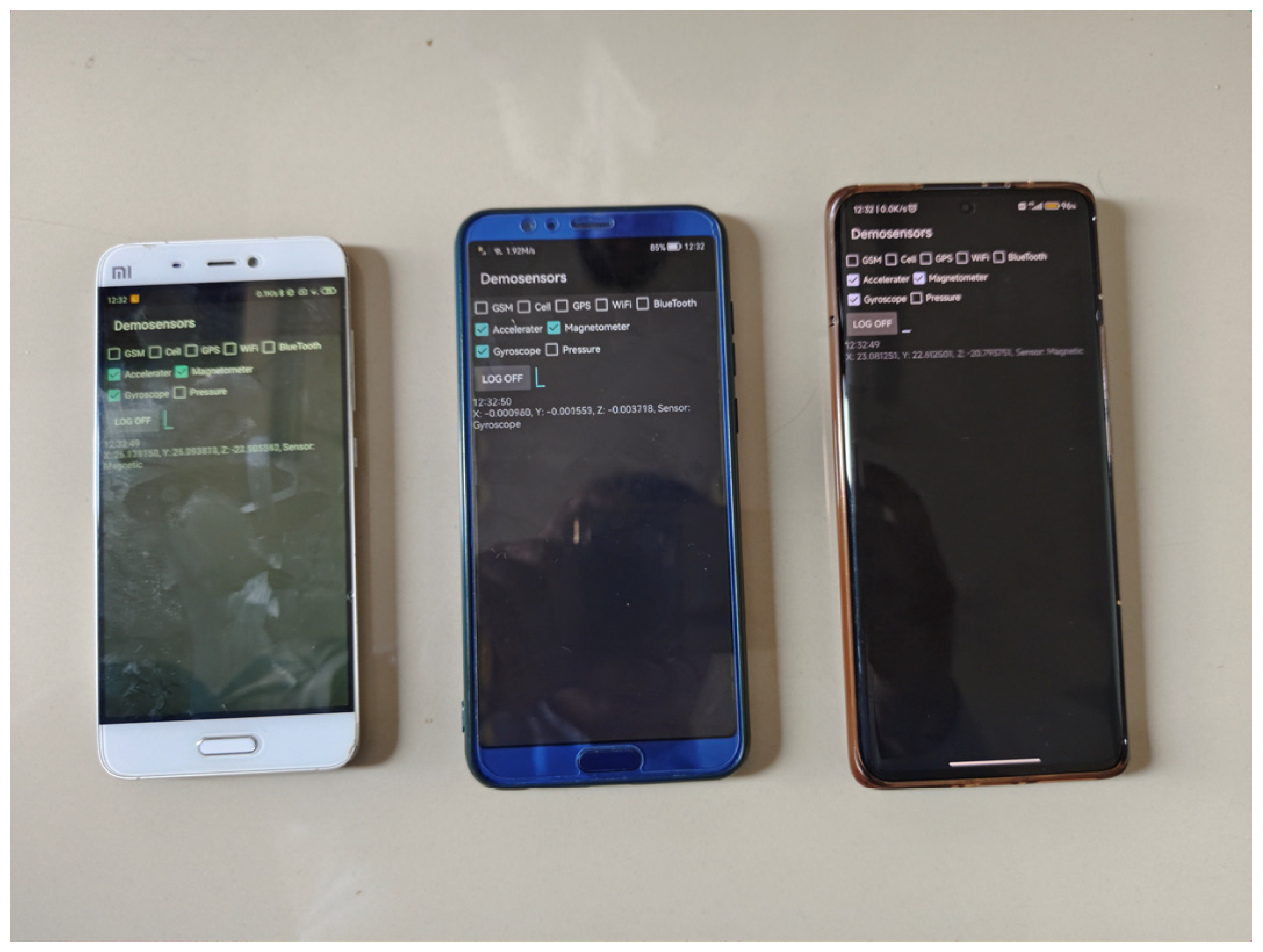
3. Experiments and Results Analysis
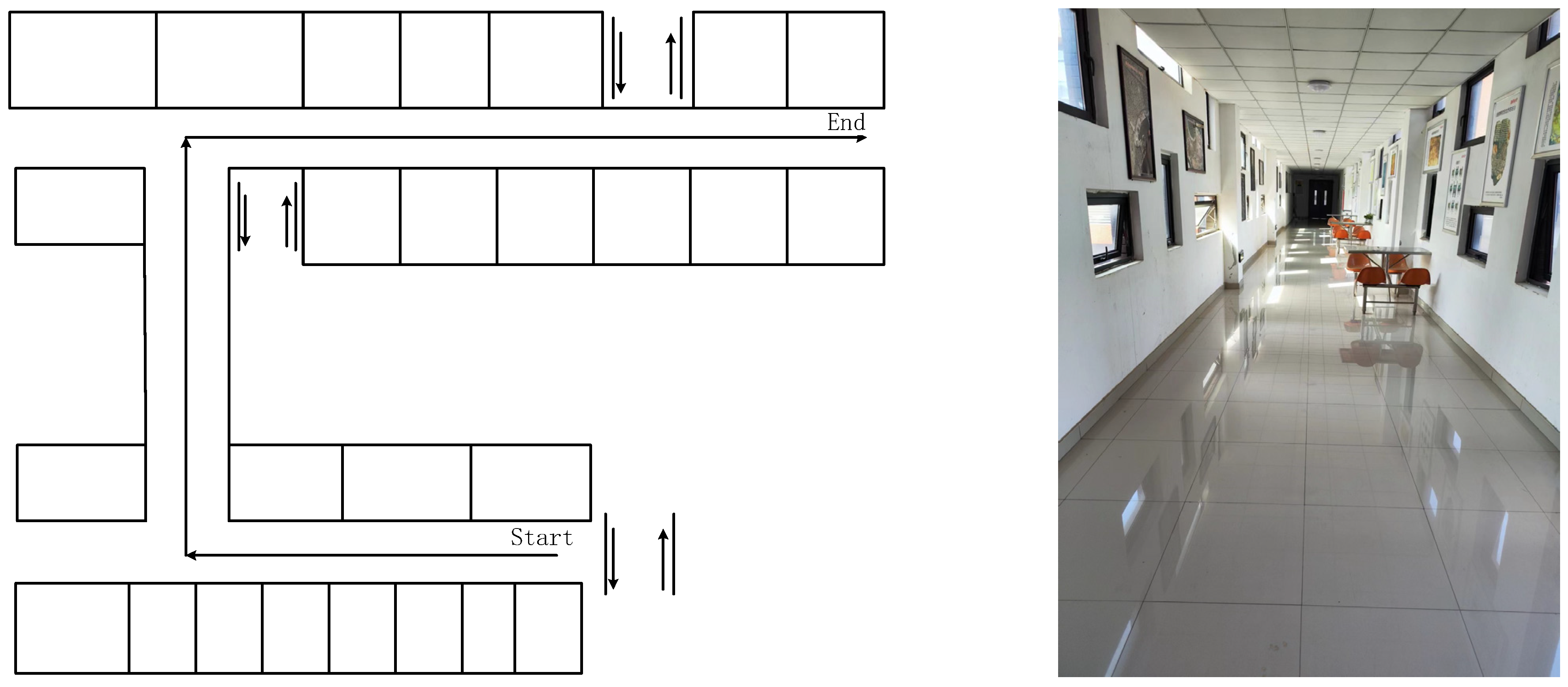
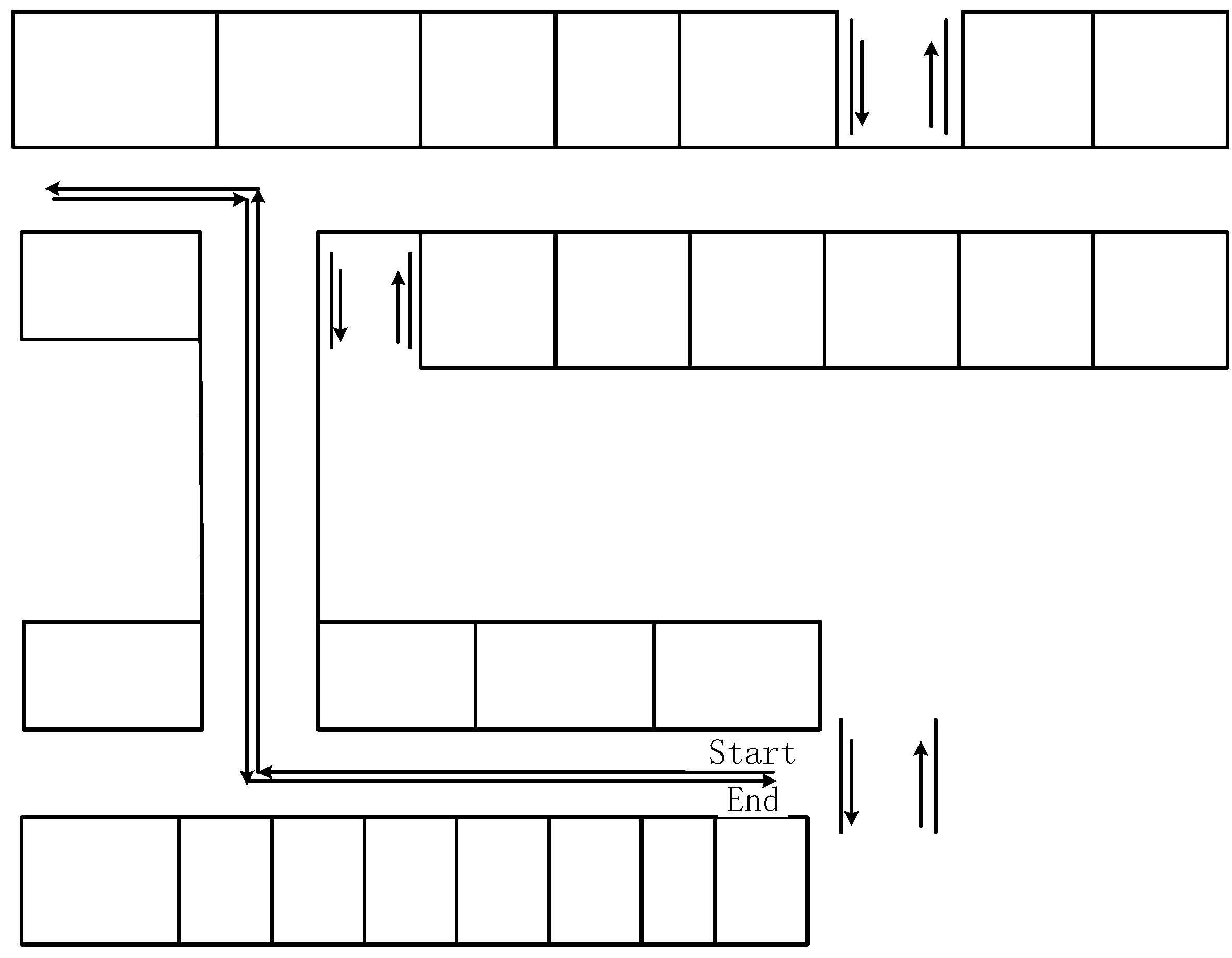
3.1. Experimental-Site Layout
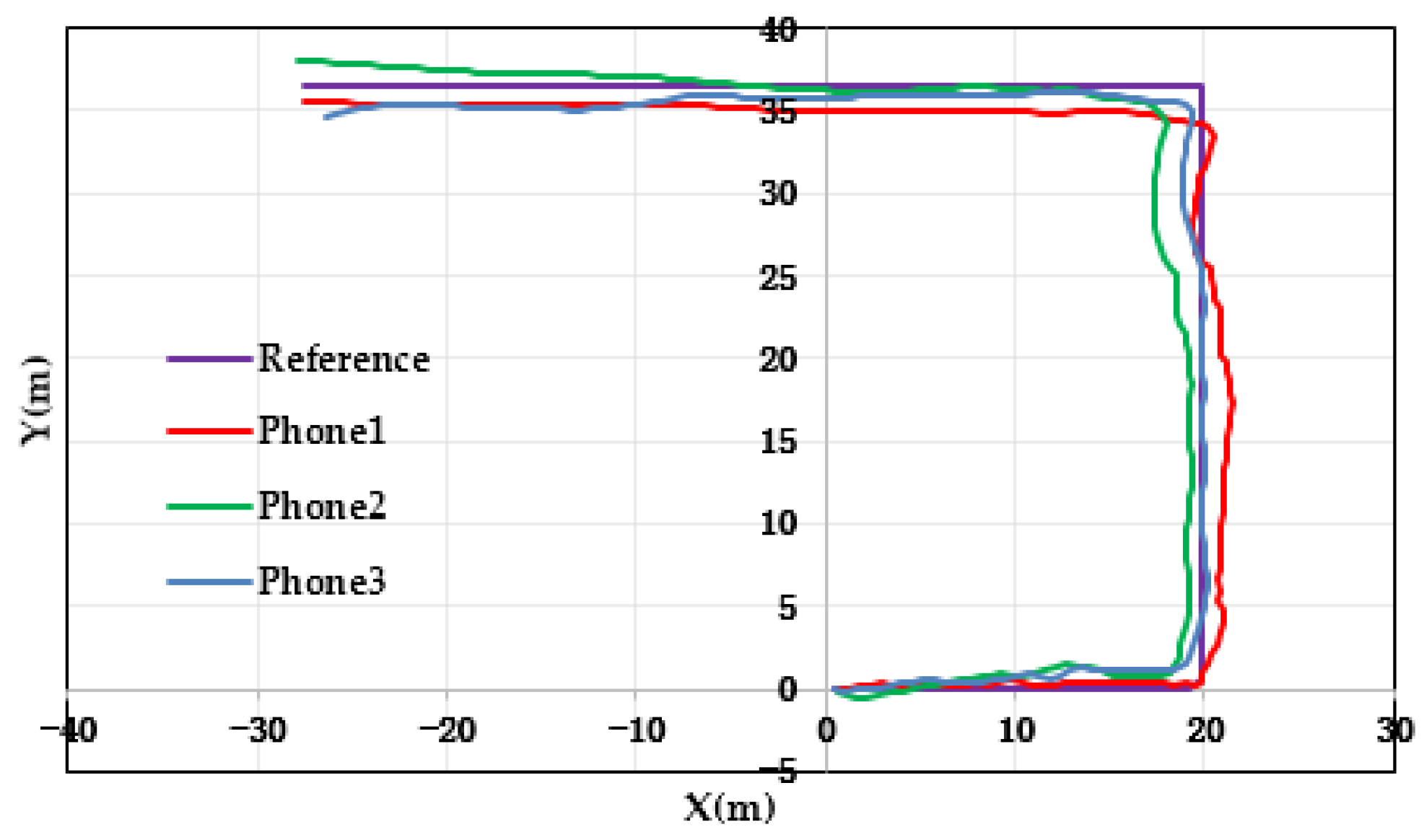
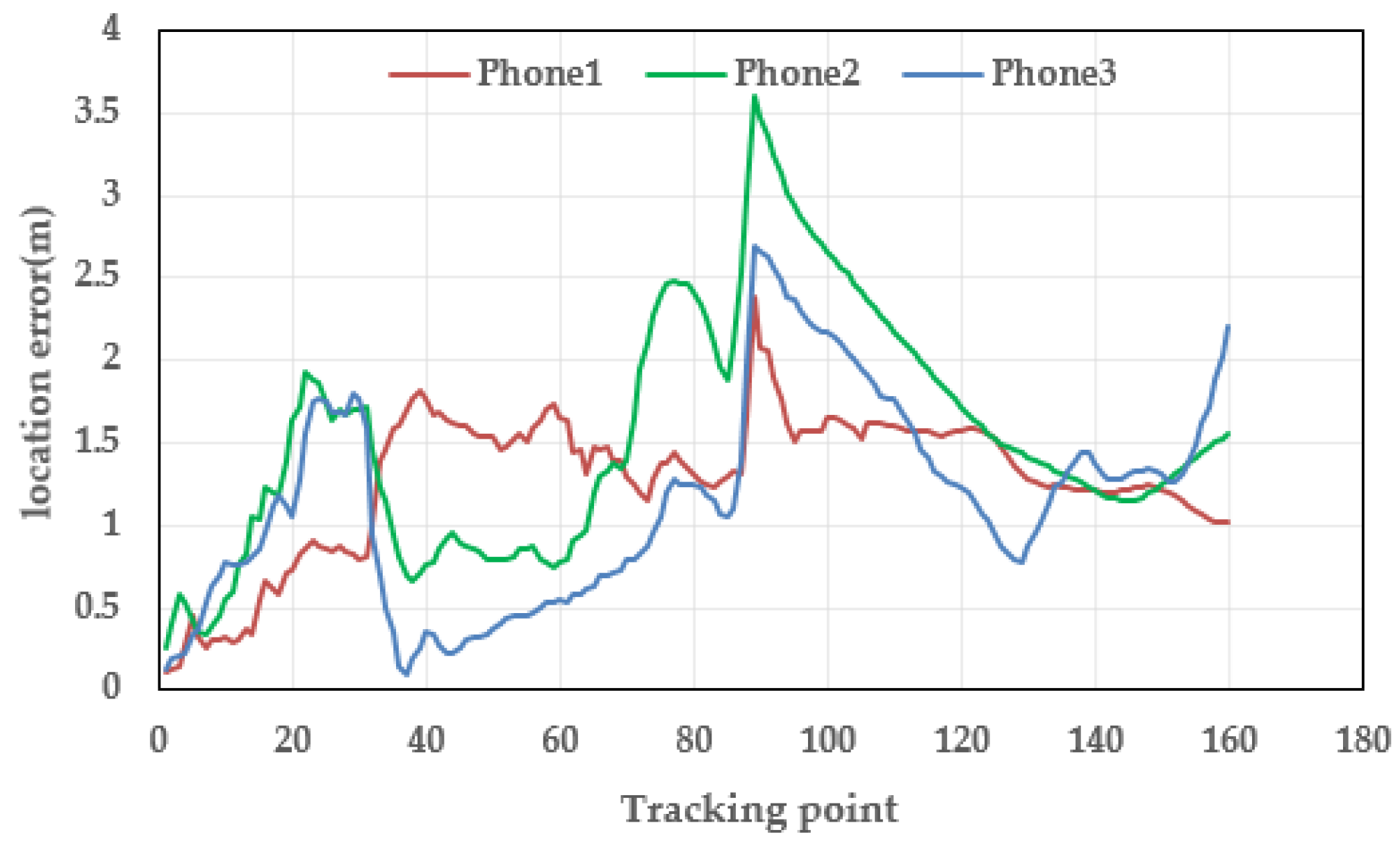
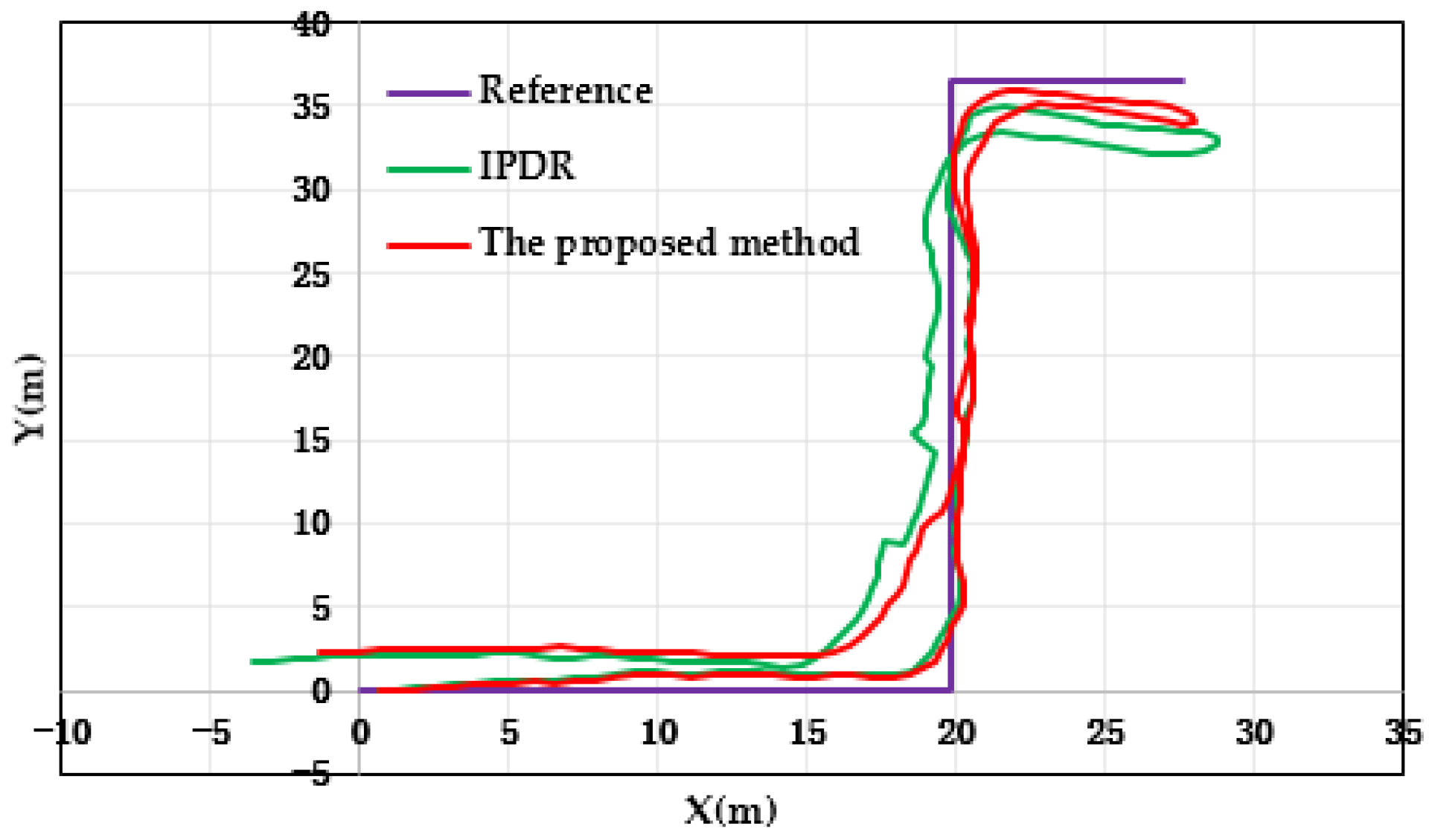
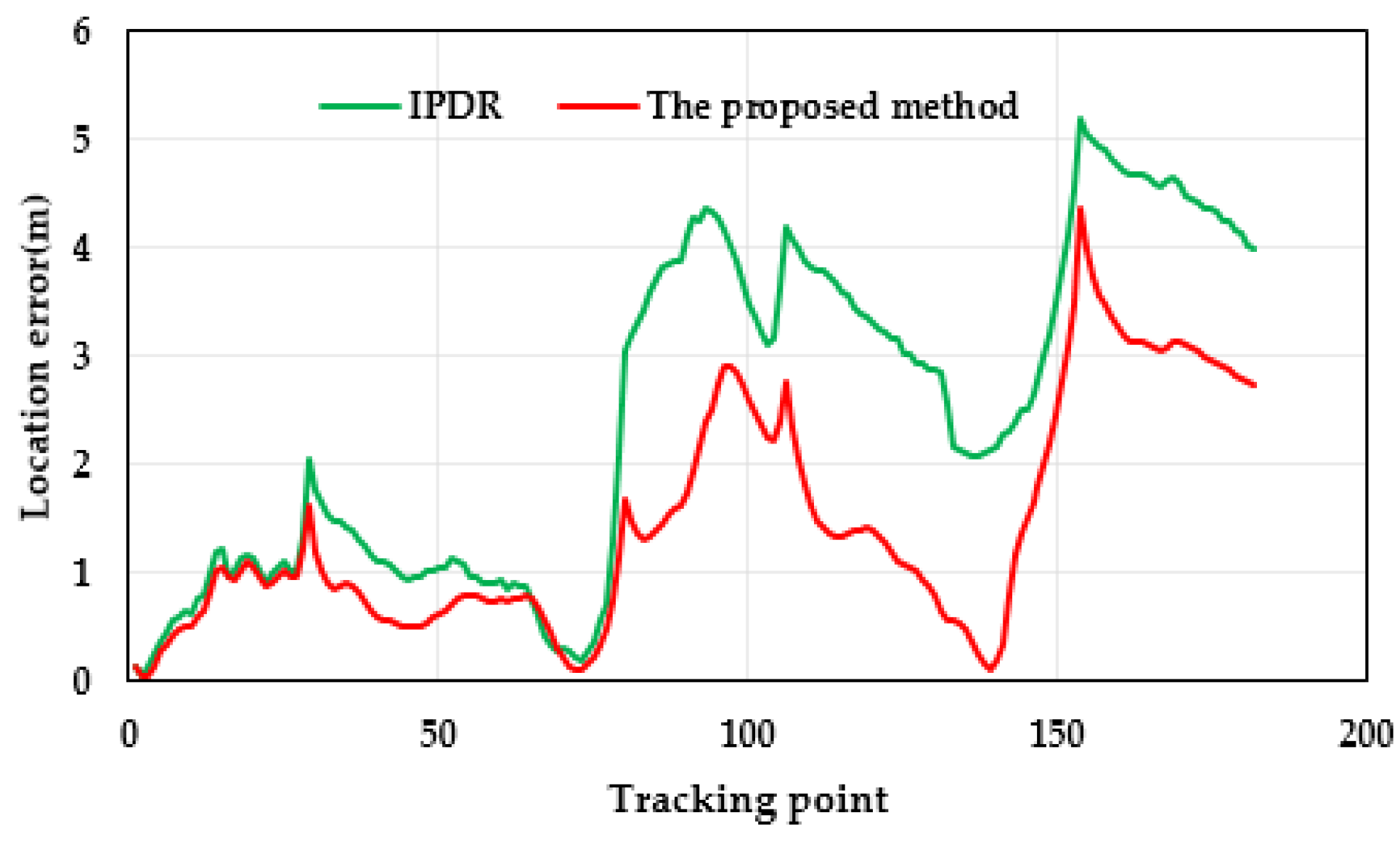
3.2. Results Analysis
3.3. The Second Experiment and Results Analysis
4. Discussion
- (1)
- Different from most pedestrian-indoor-positioning methods, the method proposed in this paper is based on smartphone MEMS sensors to determine indoor positioning. Considering the adaptability and robustness of the filter, a two-step RACKF algorithm is proposed to estimate the pedestrian position to improve the positioning accuracy and weaken the error accumulation of the PDR method. However, the proposed method only applies to pedestrians holding a smartphone with their hands and maintaining it level. It does not apply to pocket and swing modes of the phone, which will be the subject of future research work. Based on these limitations, our future work will focus on a more comprehensive positioning model. In addition, because the two-step RACKF algorithm comprehensively considers robustness and adaptability, the complexity of the algorithm is increased.
- (2)
- Due to the complex and changeable indoor environment, the influencing factors of pedestrian positioning are uncertain. Although the proposed two-step robust-adaptive-cubature Kalman filter indoor-positioning method can reduce the positioning-accumulation error of PDR to a certain extent, pedestrian-indoor-positioning error may still accumulate. Therefore, it is necessary to further improve the performance of the algorithm and reduce error accumulation.
- (3)
- It can be inferred from the experimental results that the method proposed in this paper can meet the needs of most ordinary pedestrians. However, the error is relatively large in the place of turning. How to further improve the positioning accuracy of pedestrian turning is a future research direction.
- (4)
- Pedestrian-behavior patterns in complex environments are complex and changeable. In actual scenes, pedestrian-walking patterns are changeable during walking, which may affect the accuracy of pedestrian positioning. It is necessary to conduct an in-depth analysis of multi-sensor data characteristics of smartphones and use recognition algorithms to intelligently identify pedestrian-behavior characteristics.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| LBS | location-based services |
| MEMS | micro-electro-mechanical systems |
| PDR | pedestrian dead reckoning |
| RACKF | Robust-adaptive-cubature Kalman filter |
| RMSE | root mean square error |
| GNSS | Global Navigation Satellite System |
| CF | complementary filter |
| KF | Kalman filter |
| EKF | extended Kalman filter |
| UKF | unscented Kalman filter |
| CKF | cubature Kalman filter |
References
- Zhang, R.; Mi, J.; Li, J.; Wang, Q. A Continuous PDR and GNSS Fusing Algorithm for Smartphone Positioning. Remote Sens. 2022, 14, 5171. [Google Scholar] [CrossRef]
- Xu, L.; Xiong, Z.; Liu, J.; Wang, Z.; Ding, Y. A Novel Pedestrian Dead Reckoning Algorithm for Multi-Mode Recognition Based on Smartphones. Remote Sens. 2019, 11, 294. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Xia, L.; Xia, J.; Li, Q.; Zhu, H.; Cai, Y. Smartphone-Based Pedestrian Dead Reckoning for 3D Indoor Positioning. Sensors 2021, 21, 8180. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, T.; Zhu, S. Adaptive Multi-Pedestrian Tracking by Multi-Sensor: Track-to-Track Fusion Using Monocular 3D Detection and MMW Radar. Remote Sens. 2022, 14, 1837. [Google Scholar] [CrossRef]
- Bastos, L.; Buist, P.; Cefalo, R.; Goncalves, J.A.; Ivan, A.; Magalhaes, A.; Pandele, A.; Porretta, M.; Radutu, A.; Sluga, T.; et al. Kinematic Galileo and GPS Performances in Aerial, Terrestrial, and Maritime Environments. Remote Sens. 2022, 14, 3414. [Google Scholar] [CrossRef]
- Zhuang, Y.; Sun, X.; Li, Y.; Huai, J.; Hua, L.; Yang, X.; Cao, X.; Zhang, P.; Cao, Y.; Qi, L.; et al. Multi-sensor integrated navigation/positioning systems using data fusion: From analytics-based to learning-based approaches. Inf. Fusion. 2023, 95, 62–90. [Google Scholar] [CrossRef]
- Lee, J.; Park, K.E.; Kim, Y. A Study on Indoor Positioning based on Pedestrian Dead Reckoning Using Inertial Measurement Unit. J. Soc. Disaster Inf. 2021, 17, 521–534. [Google Scholar] [CrossRef]
- Jeong, S.; Min, J.; Park, Y. Indoor Positioning Using Deep-Learning-Based Pedestrian Dead Reckoning and Optical Camera Communication. IEEE Access 2021, 9, 133725–133734. [Google Scholar] [CrossRef]
- Geng, J.; Xia, L.; Wu, D. Attitude and Heading Estimation for Indoor Positioning Based on the Adaptive Cubature Kalman Filter. Micromachines 2021, 12, 79. [Google Scholar] [CrossRef]
- Lamoureux, C.; Chelouah, R. Fusion particle and fingerprint recognition for indoor positioning system on mobile. Eng. Appl. Artif. Intell. 2021, 98, 104082. [Google Scholar] [CrossRef]
- Kang, W.; Han, Y. SmartPDR: Smartphone-based pedestrian dead reckoning for indoor localization. IEEE Sens. J. 2014, 15, 2906–2916. [Google Scholar] [CrossRef]
- Shi, L.F.; Feng, B.L.; Dai, Y.F.; Liu, G.X.; Shi, Y. Pedestrian Indoor Localization Method Based on Integrated Particle Filter. IEEE Instrum. Meas. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Guo, G.; Yan, K.; Liu, Z.; Chen, L.; Chen, R. Virtual Wireless Device Constrained Robust Extended Kalman Filters for Smartphone Positioning in Indoor Corridor Environment. IEEE Sens. J. 2023, 23, 2815–2822. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef] [Green Version]
- Yu, F.; Sun, Q.; Lv, C.; Ben, Y.; Fu, Y. A SLAM algorithm based on adaptive cubature kalman filter. Math. Probl. Eng. 2014, 2014, 171958. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Lai, J.; Li, Z.; Liu, J. An adaptive cubature Kalman filter algorithm for inertial and land-based navigation system. Aerosp. Sci. Technol. 2016, 51, 52–60. [Google Scholar] [CrossRef]
- Wu, D.; Xia, L.; Geng, J. Heading Estimation for Pedestrian Dead Reckoning Based on Robust Adaptive Kalman Filtering. Sensors 2018, 18, 1970. [Google Scholar] [CrossRef] [Green Version]
- Xia, L.; Geng, J.; Wu, D.; Peng, Q. Attitude heading estimation of indoor moving object based on extended Kalman filter algorithm. In 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS); IEEE: Piscataway, NJ, USA, 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Zhao, H.; Cheng, W.; Yang, N.; Qiu, S.; Wang, Z.; Wang, J. Smartphone-Based 3D Indoor Pedestrian Positioning through Multi-Modal Data Fusion. Sensors 2019, 19, 4554. [Google Scholar] [CrossRef] [Green Version]
- Cui, Y.; Zhang, Y.; Huang, Y.; Wang, Z.; Fu, H. Novel WiFi/MEMS Integrated Indoor Navigation System Based on Two-Stage EKF. Micromachines 2019, 10, 198. [Google Scholar] [CrossRef] [Green Version]
- Hasan, M.A.; Rahman, M.H. Smart Phone Based Sensor Fusion by Using Madgwick Filter for 3D Indoor Navigation. Wirel. Pers. Commun. 2020, 113, 2499–2517. [Google Scholar] [CrossRef]
- Huang, L.; Yu, B.; Du, S.; Li, J.; Jia, H.; Bi, J. Multi-Level Fusion Indoor Positioning Technology Considering Credible Evaluation Analysis. Remote Sens. 2023, 15, 353. [Google Scholar] [CrossRef]
- Pušnik, M.; Galun, M.; Šumak, B. Improved Bluetooth Low Energy Sensor Detection for Indoor Localization Services. Sensors 2020, 20, 2336. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Wang, Y.; Khoshelham, K. Comparative analysis of robust extended Kalman filter and incremental smoothing for UWB/PDR fusion positioning in NLOS environments. Acta Geod. Geophys. 2019, 54, 157–179. [Google Scholar] [CrossRef]
- Xu, S.; Wang, Y.; Sun, M.; Si, M.; Cao, H. A Real-Time BLE/PDR Integrated System by Using an Improved Robust Filter for Indoor Position. Appl. Sci. 2021, 11, 8170. [Google Scholar] [CrossRef]
- Meng, Y.; Zhao, L.; Guo, S.; Zhang, L. Pedestrian Navigation Method based on PDR/INS KF fusion and Height Update for Three-Dimensional Positioning. J. Phys. Conf. Ser. 2021, 1903, 012064. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, C.; Wang, C. Indoor multi-floor 3D target tracking based on the multi-sensor fusion. IEEE Access 2020, 8, 36836–36846. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, H.; Ge, B. Adaptive Unscented Kalman Filter for Target Tacking with Time-Varying Noise Covariance Based on Multi-Sensor Information Fusion. Sensors 2021, 21, 5808. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Chen, L.; Pan, Y.; Liu, M.; Cao, Z. A Pose Awareness Solution for Estimating Pedestrian Walking Speed. Remote Sens. 2019, 11, 55. [Google Scholar] [CrossRef] [Green Version]
- Feng, K.; Li, J.; Zhang, X.; Shen, C.; Bi, Y.; Zheng, T.; Liu, J. A new quaternion-based Kalman filter for real-time attitude estimation using the two-step geometrically-intuitive correction algorithm. Sensors 2017, 17, 2146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, F.; Zhang, X. Adaptive robust Kalman filtering for precise point positioning. Meas. Sci. Technol. 2014, 25, 105011. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
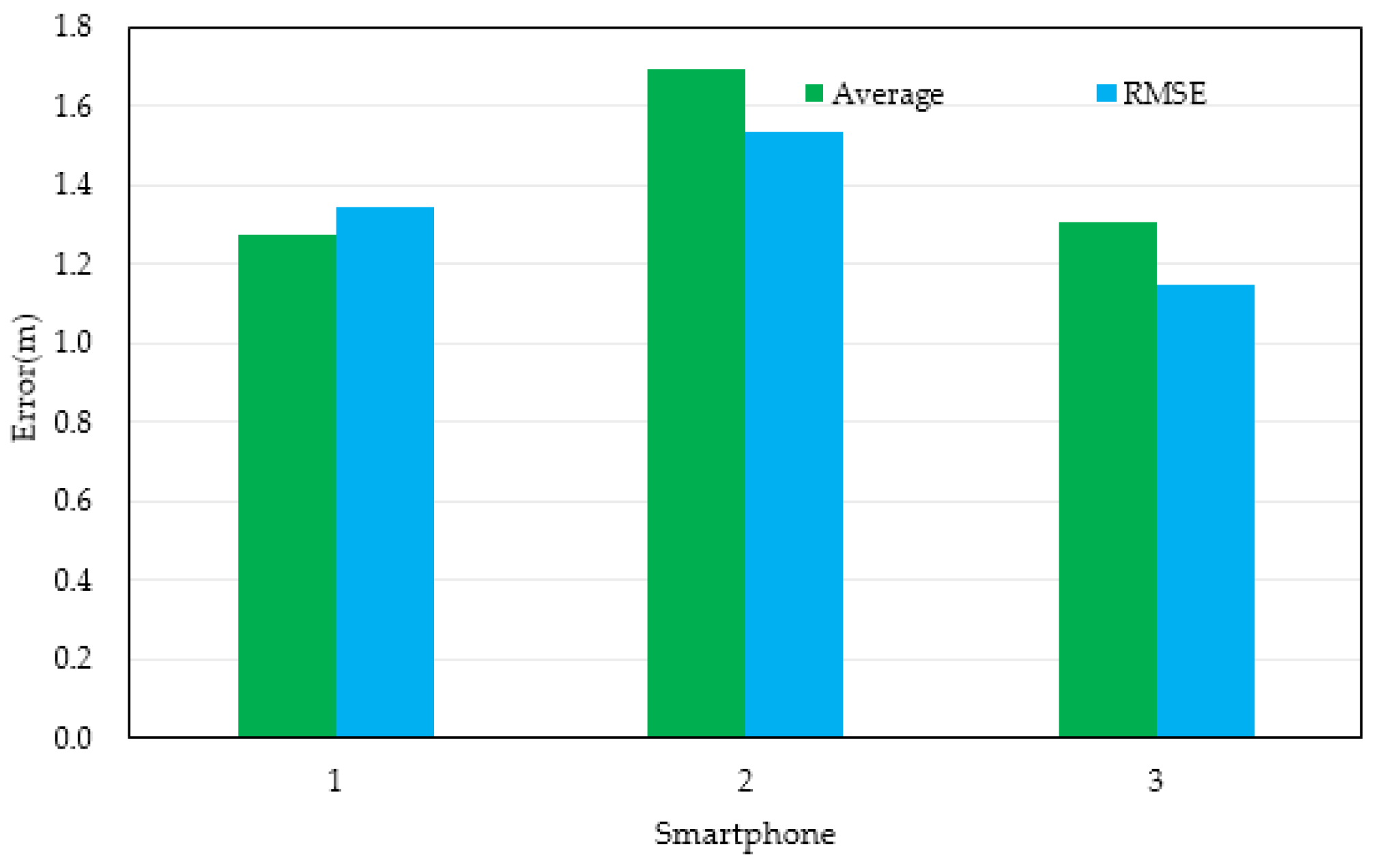
| Experimental Devices | Average | RMSE |
|---|---|---|
| Mi 5 | 1.2756 | 1.3452 |
| HONOR V10 | 1.6969 | 1.5372 |
| Mi 12 Pro | 1.3086 | 1.1508 |
| Experimental Devices | Average | RMSE |
|---|---|---|
| IPDR | 2.4726 | 2.9017 |
| The proposed method | 1.4456 | 1.7721 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Geng, J.; Yu, X.; Wu, C.; Zhang, G. Research on Pedestrian Indoor Positioning Based on Two-Step Robust Adaptive Cubature Kalman Filter with Smartphone MEMS Sensors. Micromachines 2023, 14, 1252. https://doi.org/10.3390/mi14061252
Geng J, Yu X, Wu C, Zhang G. Research on Pedestrian Indoor Positioning Based on Two-Step Robust Adaptive Cubature Kalman Filter with Smartphone MEMS Sensors. Micromachines. 2023; 14(6):1252. https://doi.org/10.3390/mi14061252
Chicago/Turabian StyleGeng, Jijun, Xuexiang Yu, Congcong Wu, and Guoqing Zhang. 2023. "Research on Pedestrian Indoor Positioning Based on Two-Step Robust Adaptive Cubature Kalman Filter with Smartphone MEMS Sensors" Micromachines 14, no. 6: 1252. https://doi.org/10.3390/mi14061252