
Temperature Drift Compensation for Four-Mass Vibration MEMS Gyroscope Based on EMD and Hybrid Filtering Fusion Method


Abstract
:1. Introduction
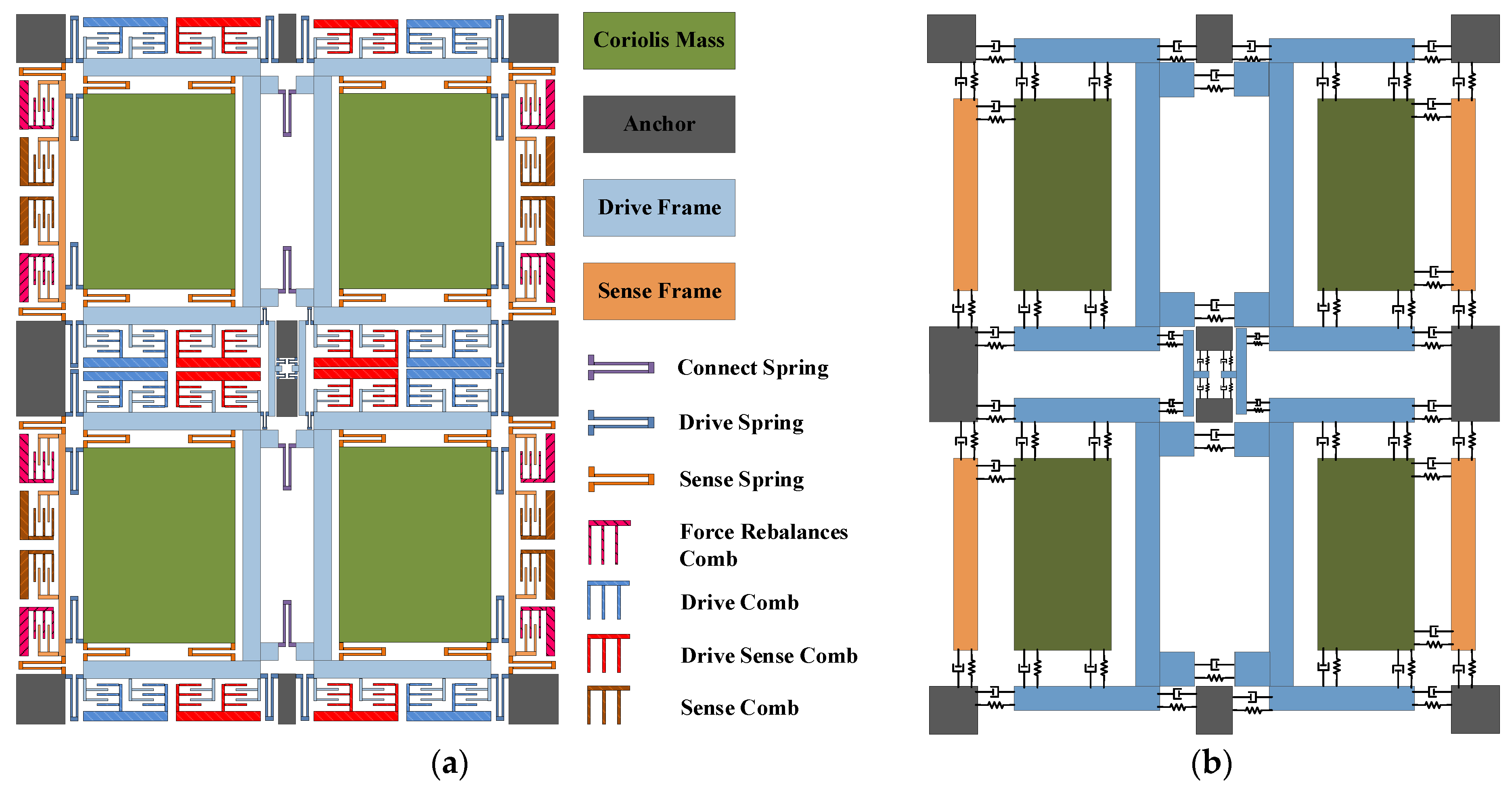
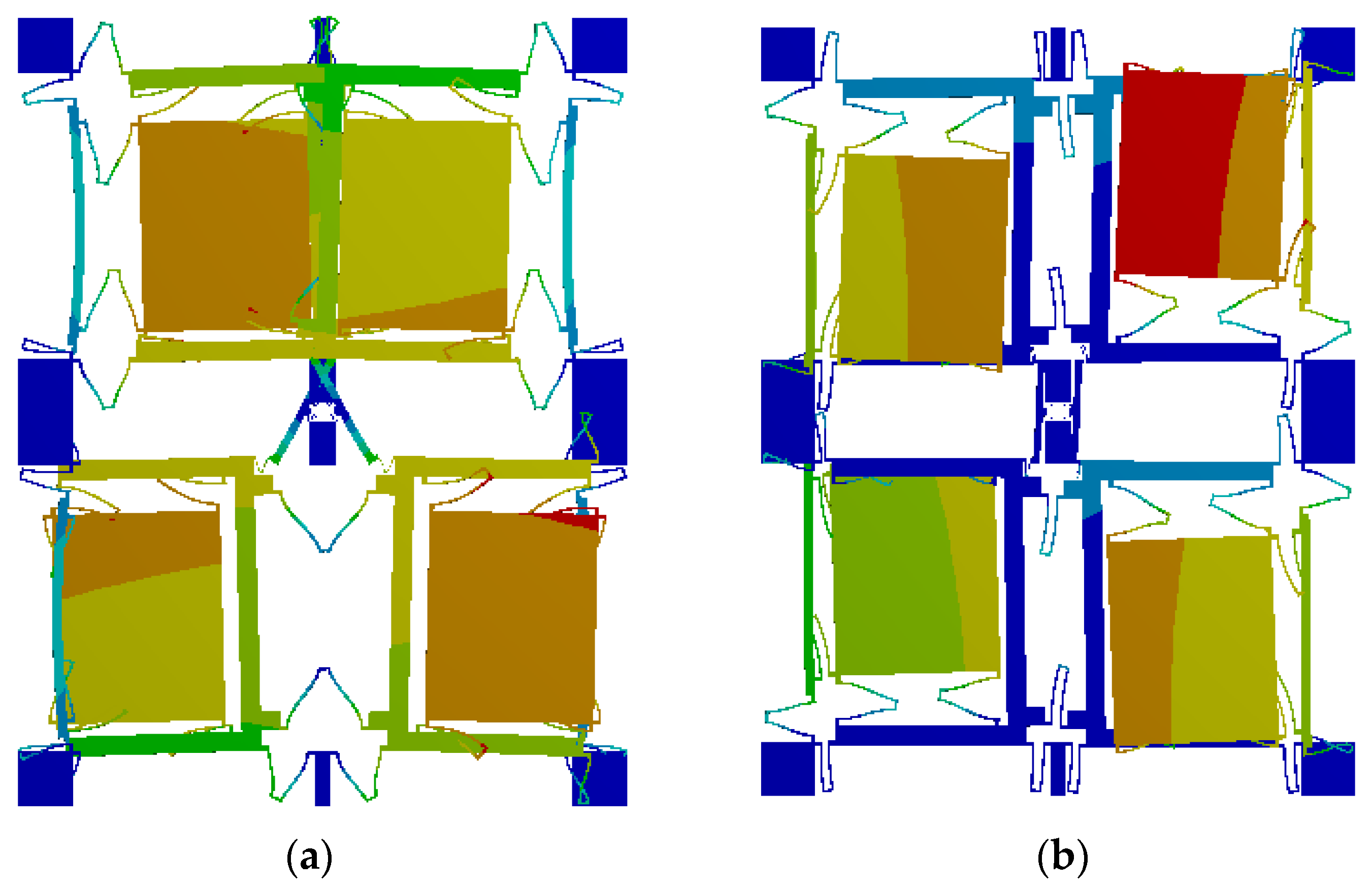
2. Structure of the Four-Mass Vibration MEMS Gyroscope
3. Model and Algorithm
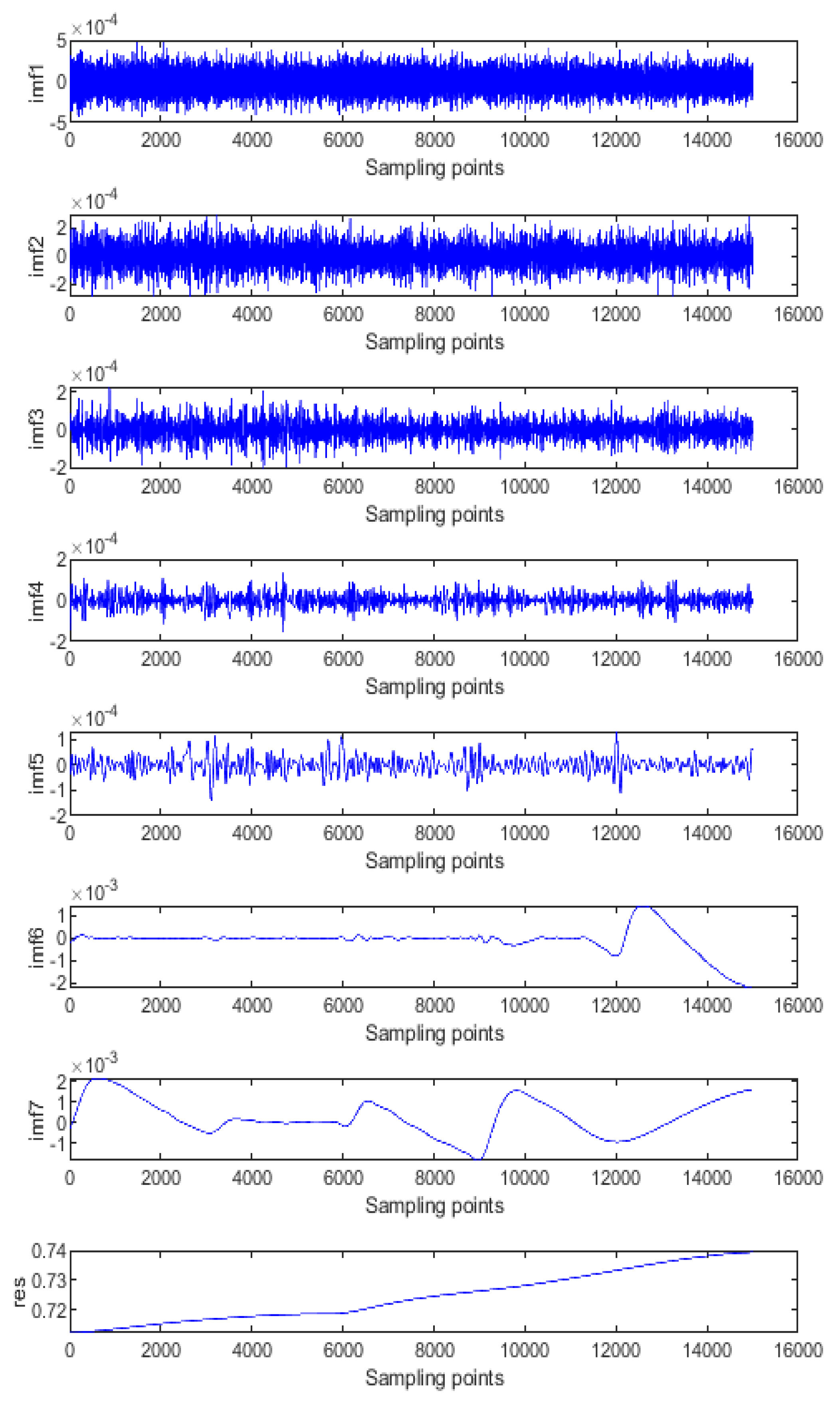
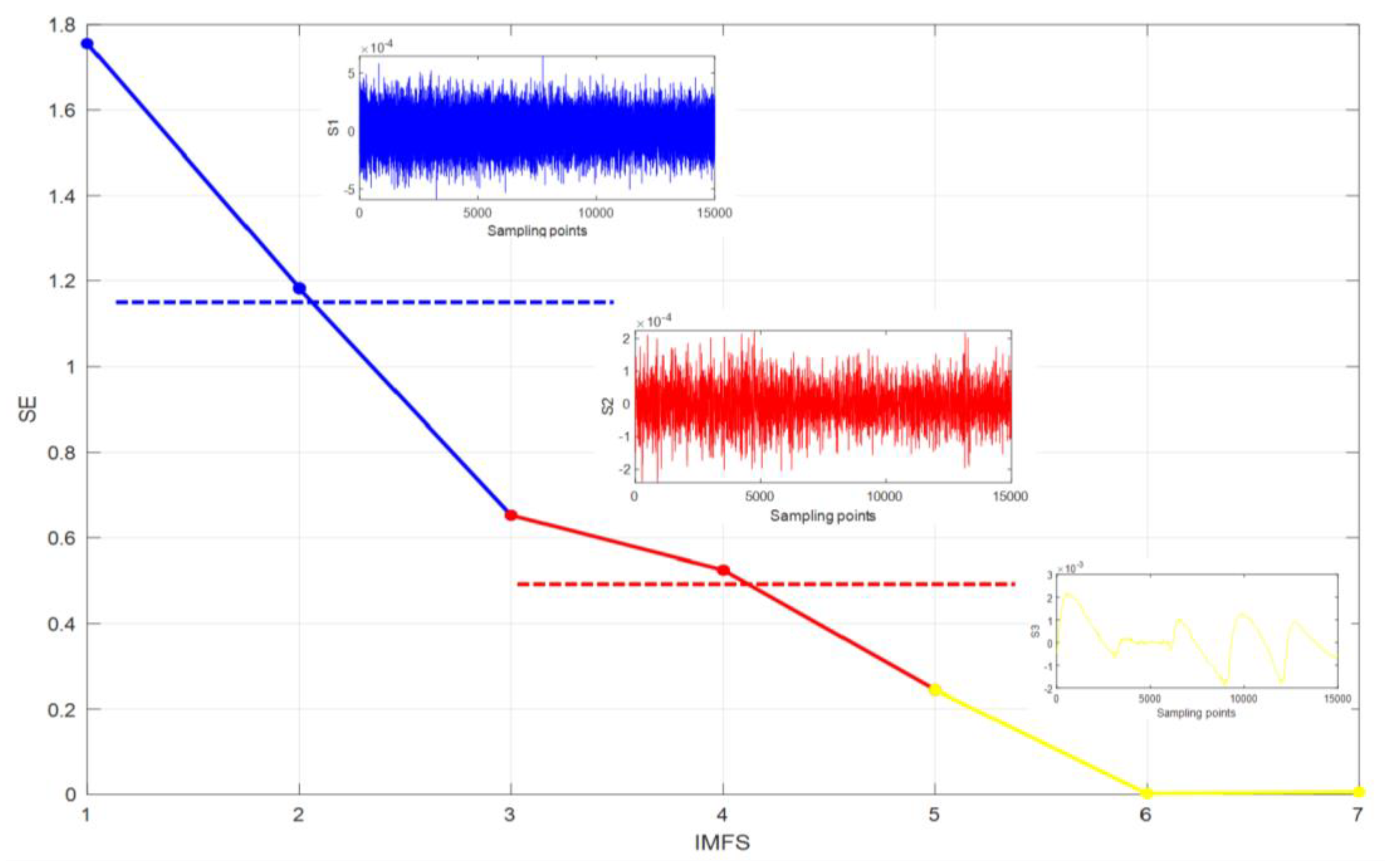
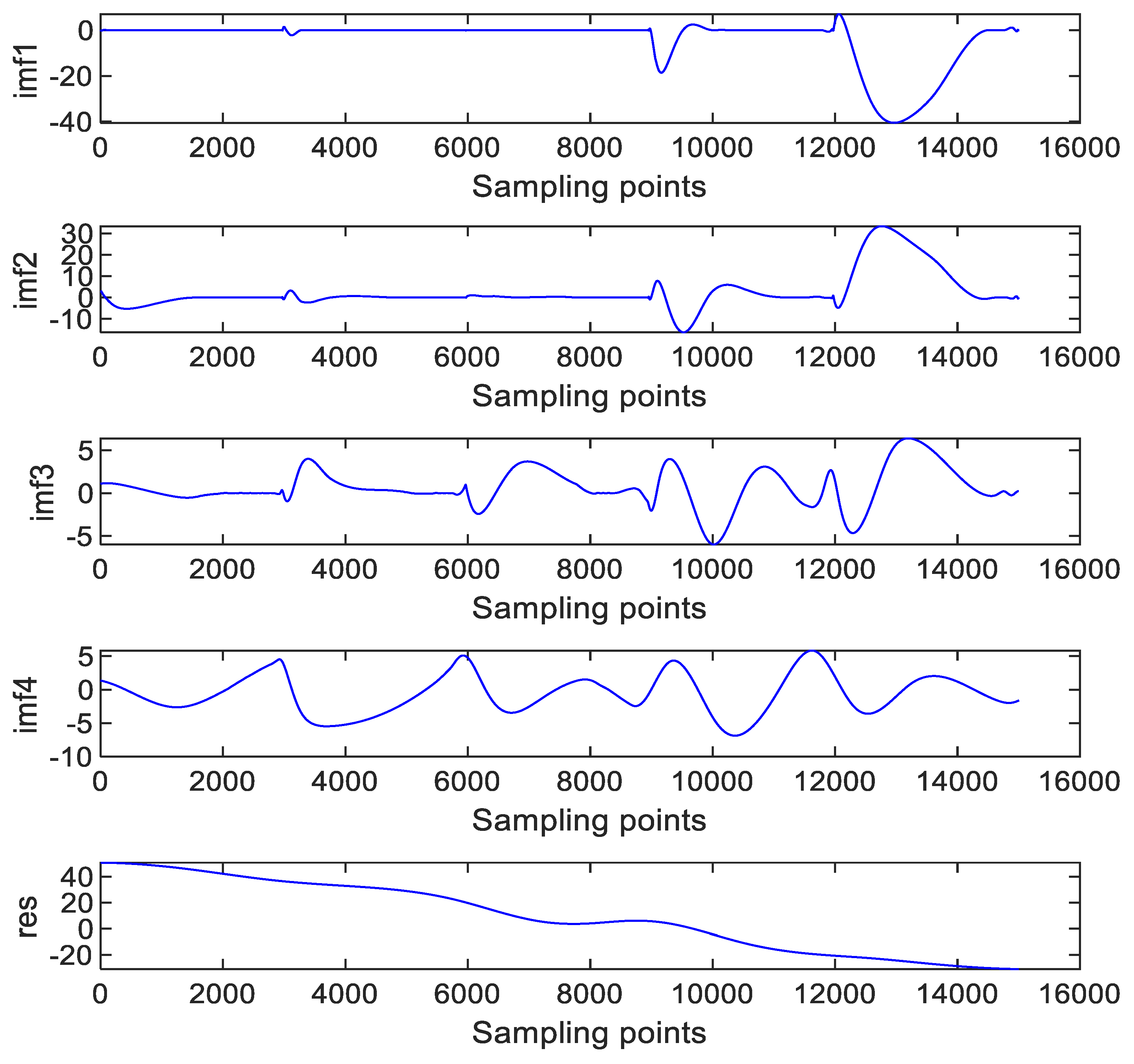
3.1. SE-EMD Algorithm
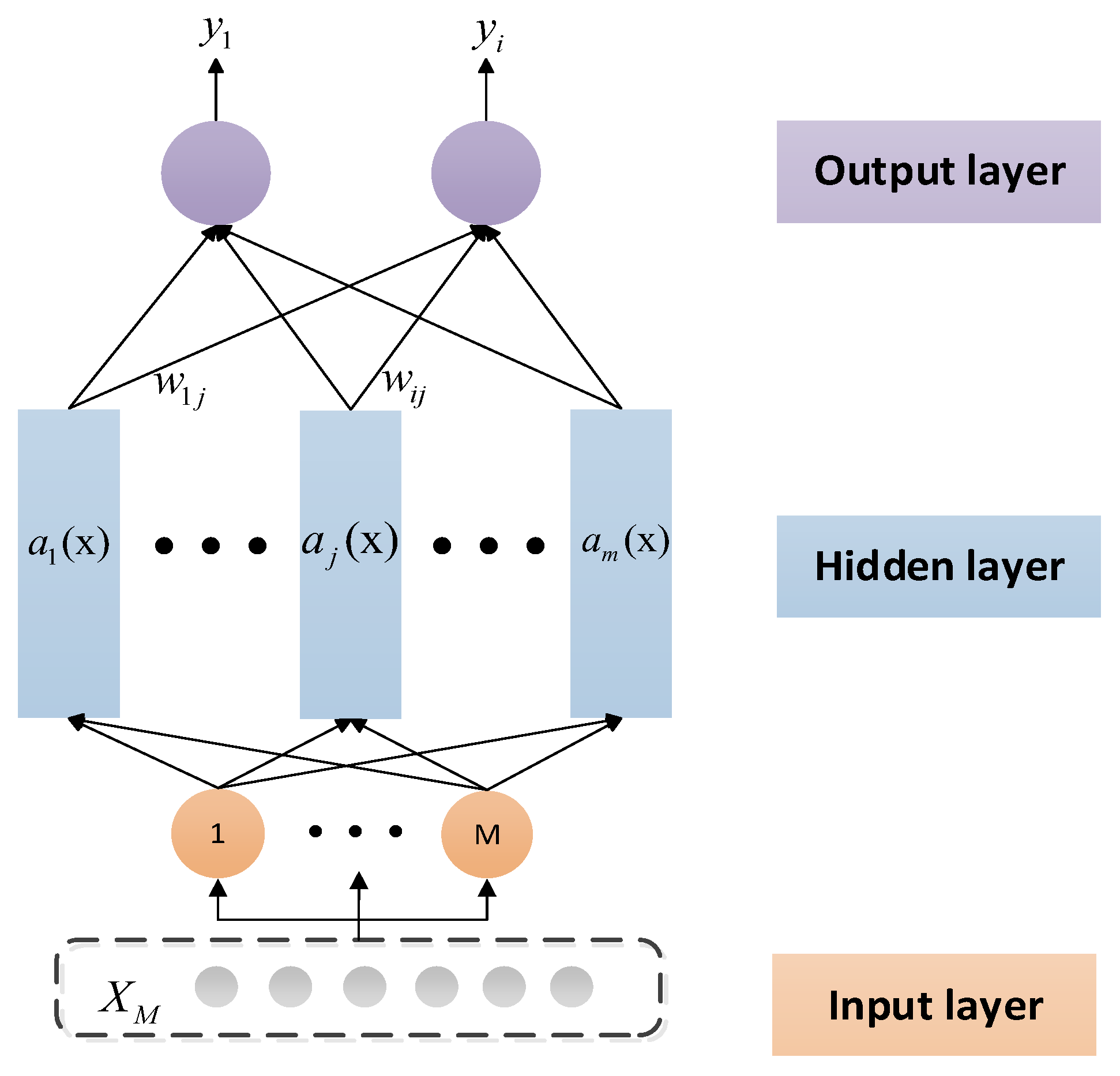
3.2. The Algorithm of RBF NN+GA+KF
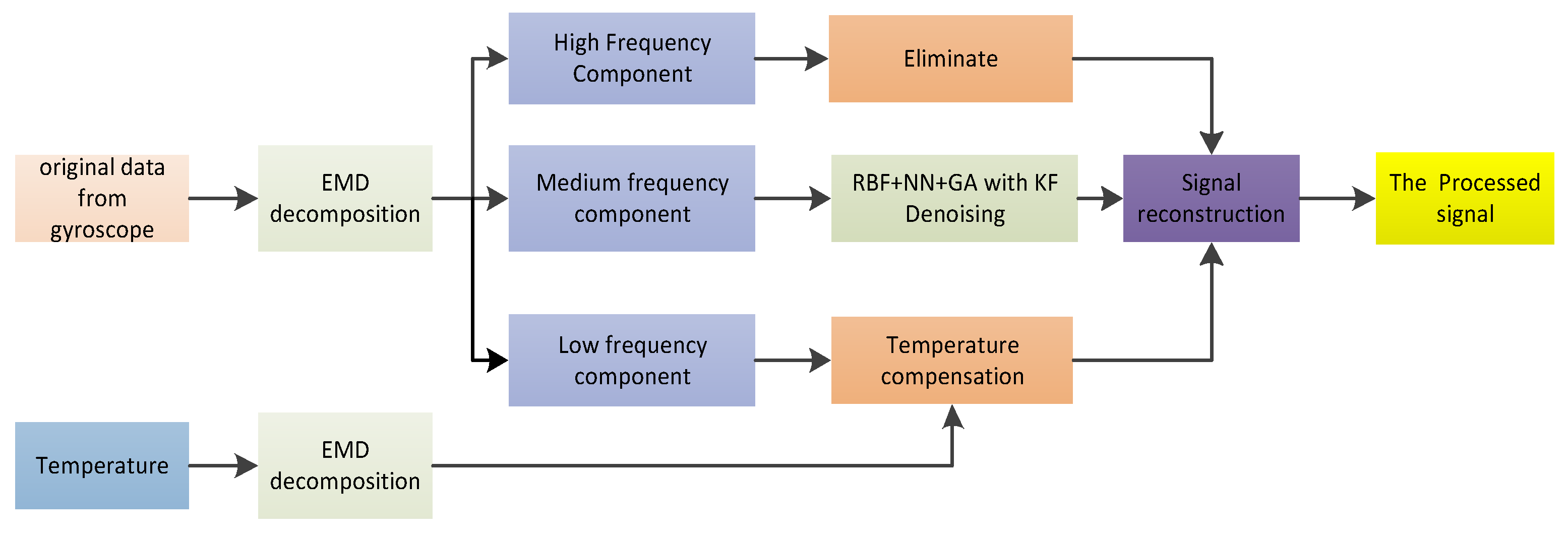
3.3. RBF NN+GA+KF Denoising Based on SE-EMD
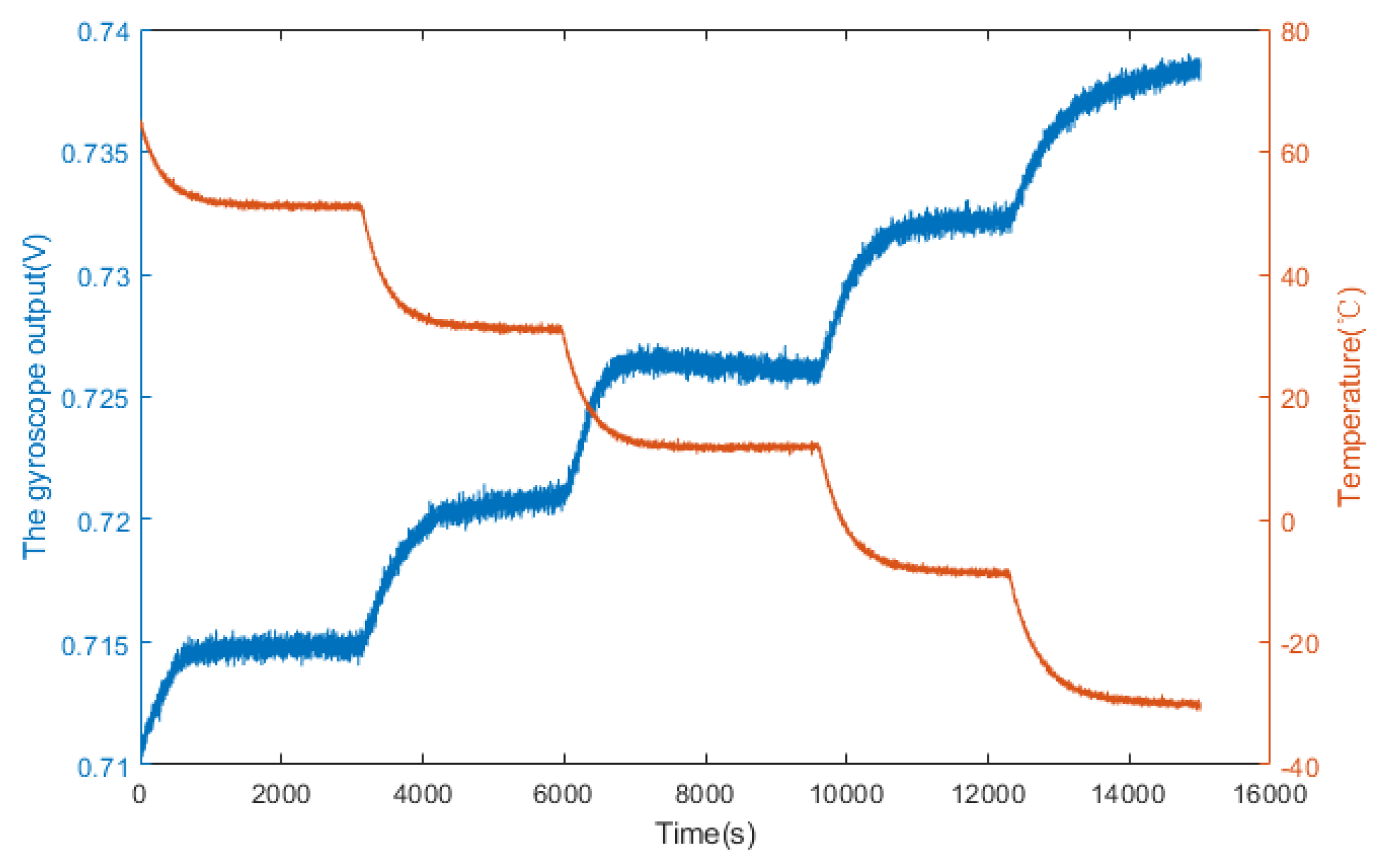
4. Temperature Experiment Proposal
5. Verification and Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Pribanić, T.; Petković, T.; Đonlić, M. 3D registration based on the direction sensor measurements. Pattern Recognit. 2019, 88, 532–546. [Google Scholar] [CrossRef]
- Davidson, P.; Virekunnas, H.; Sharma, D.; Piché, R.; Cronin, N. Continuous Analysis of Running Mechanics by Means of an Integrated INS/GPSDevice. Sensors 2019, 19, 1480. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, P.; Ma, G.; Wang, L. Envelope oriented singularity robust steering law of control moment gyros for spacecraft attitude maneuver. Trans. Inst. Meas. Control 2019, 41, 954. [Google Scholar] [CrossRef]
- Li, Y.; Hu, H.; Zhou, G. Using Data Augmentation in Continuous Authentication on Smartphones. IEEE Internet Things J. 2018, 6, 628–640. [Google Scholar] [CrossRef]
- Jauhiainen, M.; Puustinen, J.; Mehrang, S.; Ruokolainen, J.; Holm, A.; Vehkaoja, A.; Nieminen, H. Identification of Motor Symptoms Related to Parkinson Disease Using Motion-Tracking Sensors at Home (KAVELI): Protocol for an Observational Case-Control Study. JMIR Res. Protoc. 2019, 8, e12808. [Google Scholar] [CrossRef] [PubMed]
- Voicu, R.A.; Dobre, C.; Bajenaru, L.; Ciobanu, R.I. Human Physical Activity Recognition Using Smartphone Sensors. Sensors 2019, 19, 458. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Ma, H.; Jin, Z. Improving thermal stability of a resonator fiber optic gyro employing a polarizing resonator. Opt. Express 2013, 21, 358. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Zhang, Y.; Gao, W. Method to determine the optimal layer number for the quadrupolar fiber coil. Opt. Eng. 2014, 53, 084106. [Google Scholar] [CrossRef]
- Wang, J.; Yu, Y.; Chen, Y.; Luo, H.; Meng, Z. Research of a double fiber Bragg gratings vibration sensor with temperature and cross axis insensitive. Opt.—Int. J. Light Electron Opt. 2015, 126, 749–753. [Google Scholar] [CrossRef]
- Yan, Y.; Ma, H.; Jin, Z. Reducing polarization-fluctuation induced drift in resonant fiber optic gyro by using single-polarization fiber. Opt. Express 2015, 23, 2002–2009. [Google Scholar] [CrossRef]
- Ling, W.; Li, X.; Xu, Z.; Wei, Y. A Dicyclic Method for Suppressing the Thermal-induced Bias Drift of I-FOGs. IEEE Photonics Technol. Lett. 2015, 28, 272–275. [Google Scholar] [CrossRef]
- Qian, G.; Fu, X.C.; Zhang, L.J.; Tang, J.; Liu, Y.R.; Zhang, X.Y.; Zhang, T. Hybrid fiber resonator employing LRSPP waveguide coupler for gyroscope. Sci. Rep. 2017, 7, 41146. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Yu, F. Analysis for the thermal performance of a modified quadrupolar fiber coil. Opt. Eng. 2018, 57, 017109. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Y.; Xu, X.; Xi, X.; Wu, X. Research on the method to improve the vibration stability of vibratory cylinder gyroscopes under temperature variation. Int. J. Precis. Eng. Manuf. 2017, 18, 1813–1819. [Google Scholar] [CrossRef]
- Fontanella, R.; Accardo, D.; Moriello, R.S.L.; Angrisani, L.; Simone, D.D. An Innovative Strategy for Accurate Thermal Compensation of Gyro Bias in Inertial Units by Exploiting a Novel Augmented Kalman Filter. Sensors 2018, 18, 1457. [Google Scholar] [CrossRef] [PubMed]
- Cao, H.; Zhang, Y.; Shen, C.; Liu, Y.; Wang, X. Temperature Energy Influence Compensation for MEMS Vibration Gyroscope Based on RBF NN-GA-KF Method. Shock. Vib. 2018, 2018, 2830686. [Google Scholar] [CrossRef]
- Vahrameev, E.I.; Galyagin, K.S.; Oshivalov, M.A.; Savin, M.A. Method of numerical prediction and correction of thermal drift of the fiber-opticgyro. Izv. Vuzov. Priborostr. 2017, 60, 32–38. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Nayak, J.; Terra, M.H.; Sabat, S.L. ARMA model based adaptive unscented fading Kalman filter for reducing drift of fiber optic gyroscope. Sens. Actuators A Phys. 2016, 251, 42–51. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, L.; Gao, P.; Liu, Z. An Innovative Wavelet Threshold Denoising Method for Environmental Drift of Fiber Optic Gyro. Math. Probl. Eng. 2016, 2016, 9017481. [Google Scholar] [CrossRef]
- Song, R.; Chen, X.; Shen, C.; Zhang, H. Modeling FOG Drift Using Back-Propagation Neural Network Optimized by Artificial Fish Swarm Algorithm. J. Sens. 2014, 2014, 276043. [Google Scholar] [CrossRef]
- Han, X.; Hu, S.M.; Luo, H. A Simplified Model of the Compensation Method for the Thermal Bias of a Ring Laser Gyro. Lasers Eng. 2014, 27, 119–126. [Google Scholar]
- Antonova, M.V.; Matveev, V.A. Model of error of A fiber-opyic gyro exposed to thermal and magnetic fields. Her. Bauman Mosc. State Tech. Univ. Ser. Instrum. Eng. 2014, 3, 73–80. [Google Scholar]
- Zha, F.; Xu, J.; Li, J.; He, H. IUKF neural network modeling for FOG temperature drift. J. Syst. Eng. Electron. 2013, 24, 838–844. [Google Scholar] [CrossRef]
- Prikhodko, I.; Trusov, A.; Shkel, A.M. Compensation of drifts in high-Q MEMS gyroscopes using temperature self-sensing. Sens. Actuators A: Phys. 2013, 201, 517–524. [Google Scholar] [CrossRef]
- Chen, X.; Shen, C. Study on error calibration of fiber optic gyroscope under intense ambient temperature variation. Appl. Opt. 2012, 51, 3755. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wu, W.; Fang, Z.; Luo, B.; Li, Y.; Jiang, Q. Temperature Drift Compensation for Hemispherical Resonator Gyro Based on Natural Frequency. Sensors 2012, 12, 6434–6446. [Google Scholar] [CrossRef] [PubMed]
- Cai, Q.; Zhao, F.; Kang, Q.; Luo, Z.; Hu, D.; Liu, J.; Cao, H. A Novel Parallel Processing Model for Noise Reduction and Temperature Compensation of MEMS Gyroscope. Micromachines 2021, 12, 1285. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Cao, H.; Guo, T. A Hybrid Algorithm for Noise Suppression of MEMS Accelerometer Based on the Improved VMD and TFPF. Micromachines 2022, 13, 891. [Google Scholar] [CrossRef]
- Zhou, B.; Zhang, T.; Yin, P.; Chen, Z.; Song, M.; Zhang, R. Innovation of flat gyro: Center Support Quadruple Mass Gyroscope. In Proceedings of the 2016 IEEE International Symposium on Inertial Sensors and Systems, Laguna Beach, CA, USA, 22–25 February 2016. [Google Scholar]
- Trusov, A.A.; Schofield, A.R.; Shkel, A.M. Gyroscope architecture with structurally forced anti-phase drive-mode and linearly coupled anti-phase sense-mode. In Proceedings of the TRANSDUCERS 2009-2009 International Solid-State Sensors, Actuators and Microsystems Conference, Denver, CO, USA, 21–25 June 2009. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Elastic modulus (E) | 169 GPa |
| Poisson’s ratio (µ) | 0.27 |
| Density (ρ) | 2328.3 kg/m³ |
| Prototype length | 3015 μm |
| Prototype width | 2331 μm |
| Prototype height | 60 μm |
| Denoising | Temperature Compensation | ||||||
|---|---|---|---|---|---|---|---|
| Original Data | RBF NN | RBF NN+GA | RBF NN+GA+KF | ||||
| B(°/h) | N(°/h/Hz1/2) | B(°/h) | N(°/h/Hz1/2) | B(°/h) | N(°/h/Hz1/2) | B(°/h) | N(°/h/Hz1/2) |
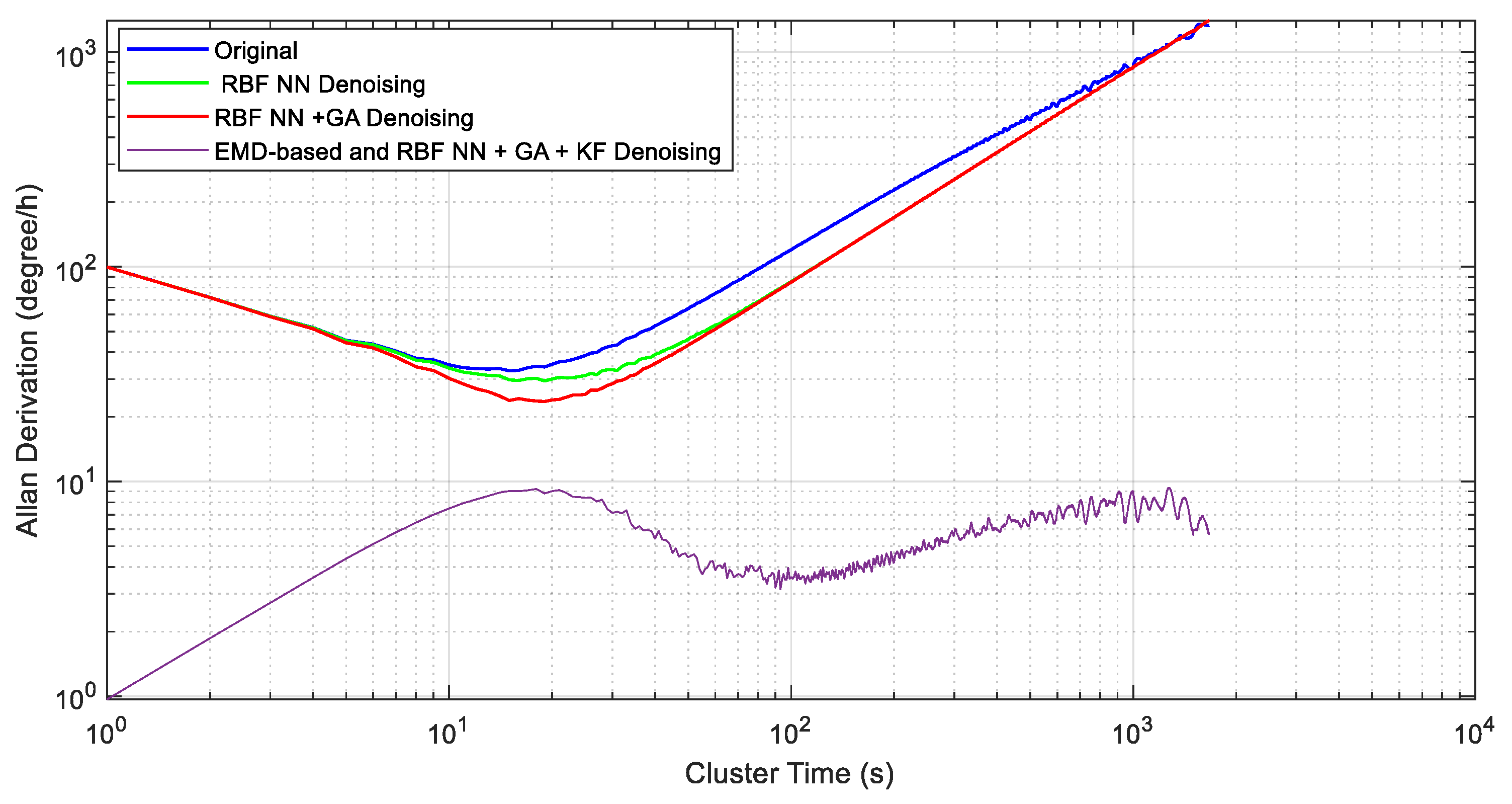
| 34.66 | 99.608 | 28.42 | 99.6037 | 23.65 | 99.6011 | 3.589 | 0.967814 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Cui, Y.; Gu, Y.; Wang, G.; Yang, J.; Chen, K.; Cao, H. Temperature Drift Compensation for Four-Mass Vibration MEMS Gyroscope Based on EMD and Hybrid Filtering Fusion Method. Micromachines 2023, 14, 971. https://doi.org/10.3390/mi14050971
Li Z, Cui Y, Gu Y, Wang G, Yang J, Chen K, Cao H. Temperature Drift Compensation for Four-Mass Vibration MEMS Gyroscope Based on EMD and Hybrid Filtering Fusion Method. Micromachines. 2023; 14(5):971. https://doi.org/10.3390/mi14050971
Chicago/Turabian StyleLi, Zhong, Yuchen Cui, Yikuan Gu, Guodong Wang, Jian Yang, Kai Chen, and Huiliang Cao. 2023. "Temperature Drift Compensation for Four-Mass Vibration MEMS Gyroscope Based on EMD and Hybrid Filtering Fusion Method" Micromachines 14, no. 5: 971. https://doi.org/10.3390/mi14050971