
High-G MEMS Accelerometer Calibration Denoising Method Based on EMD and Time-Frequency Peak Filtering

Abstract
:1. Introduction
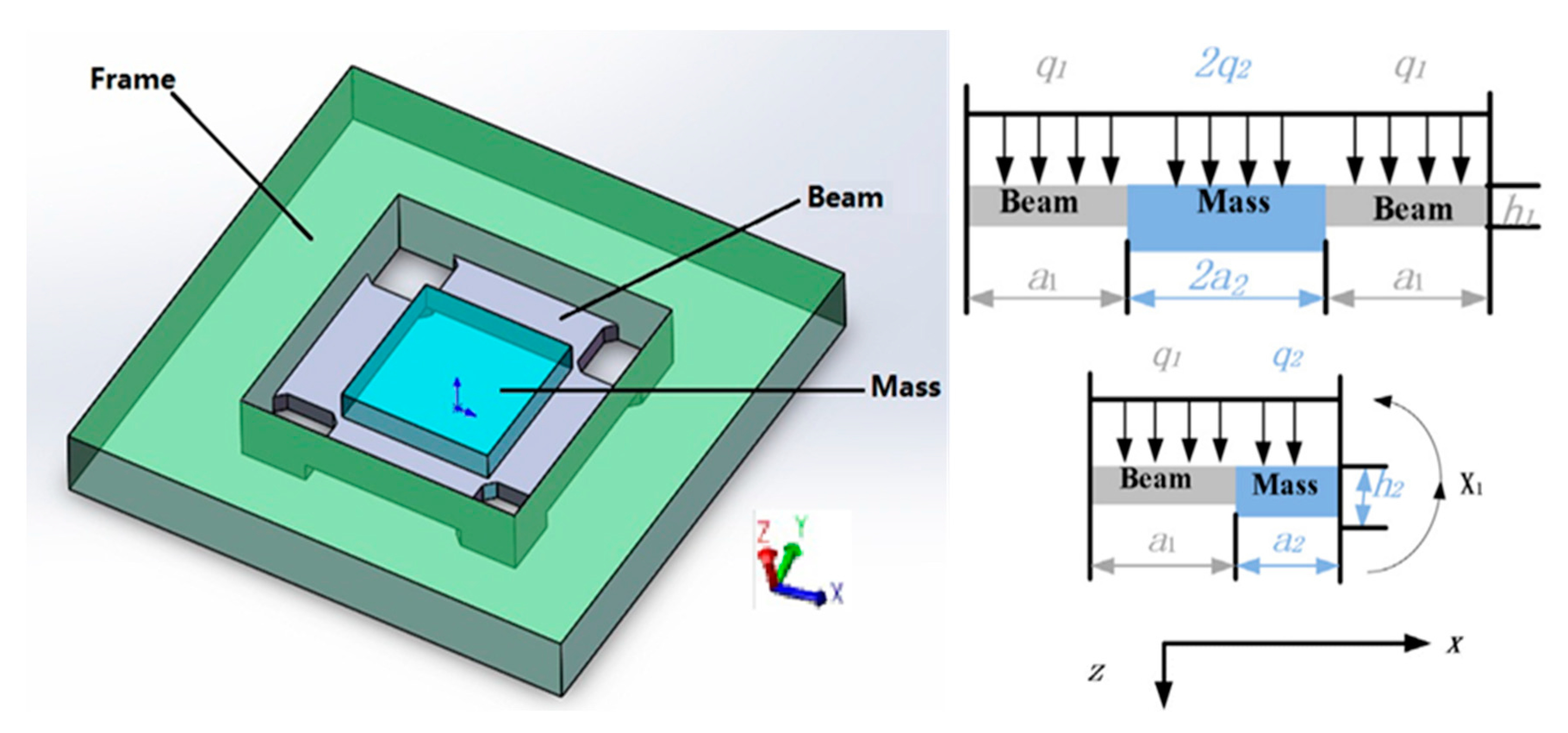
2. Structure of MEMS Accelerometer and Working Mode Analysis
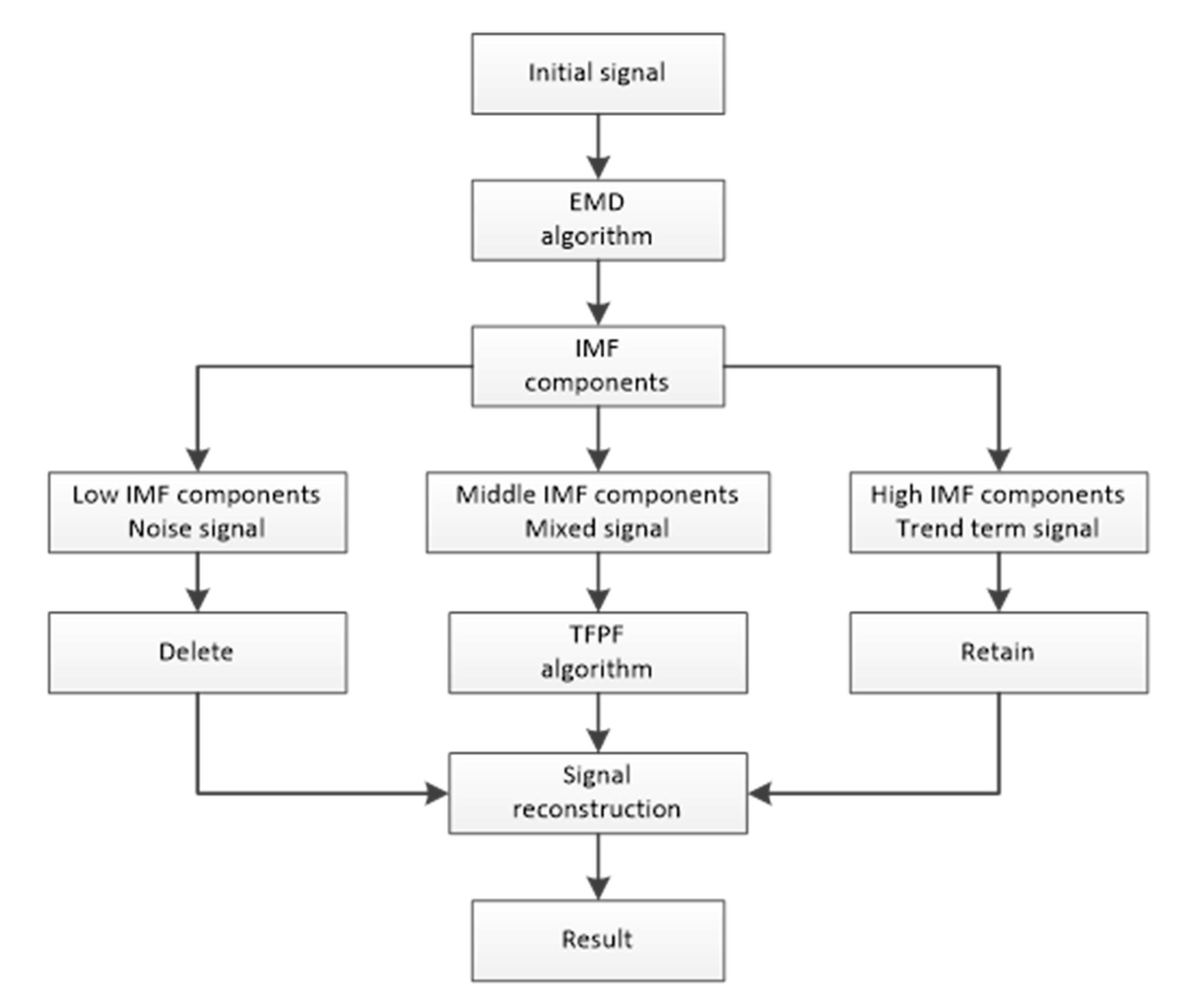
3. Methodology Combining EMD and TFPF
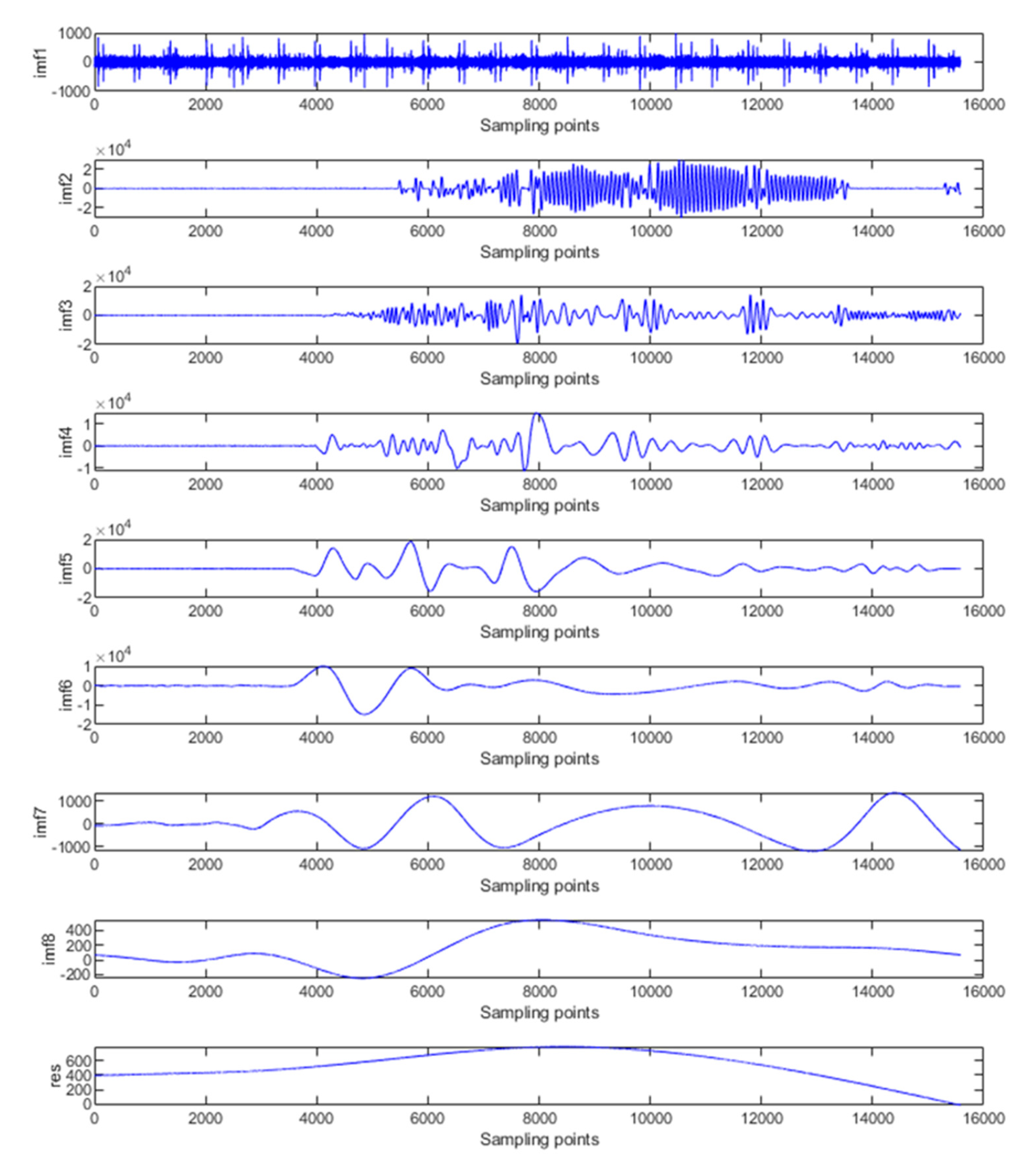
3.1. Empirical Mode Decomposition
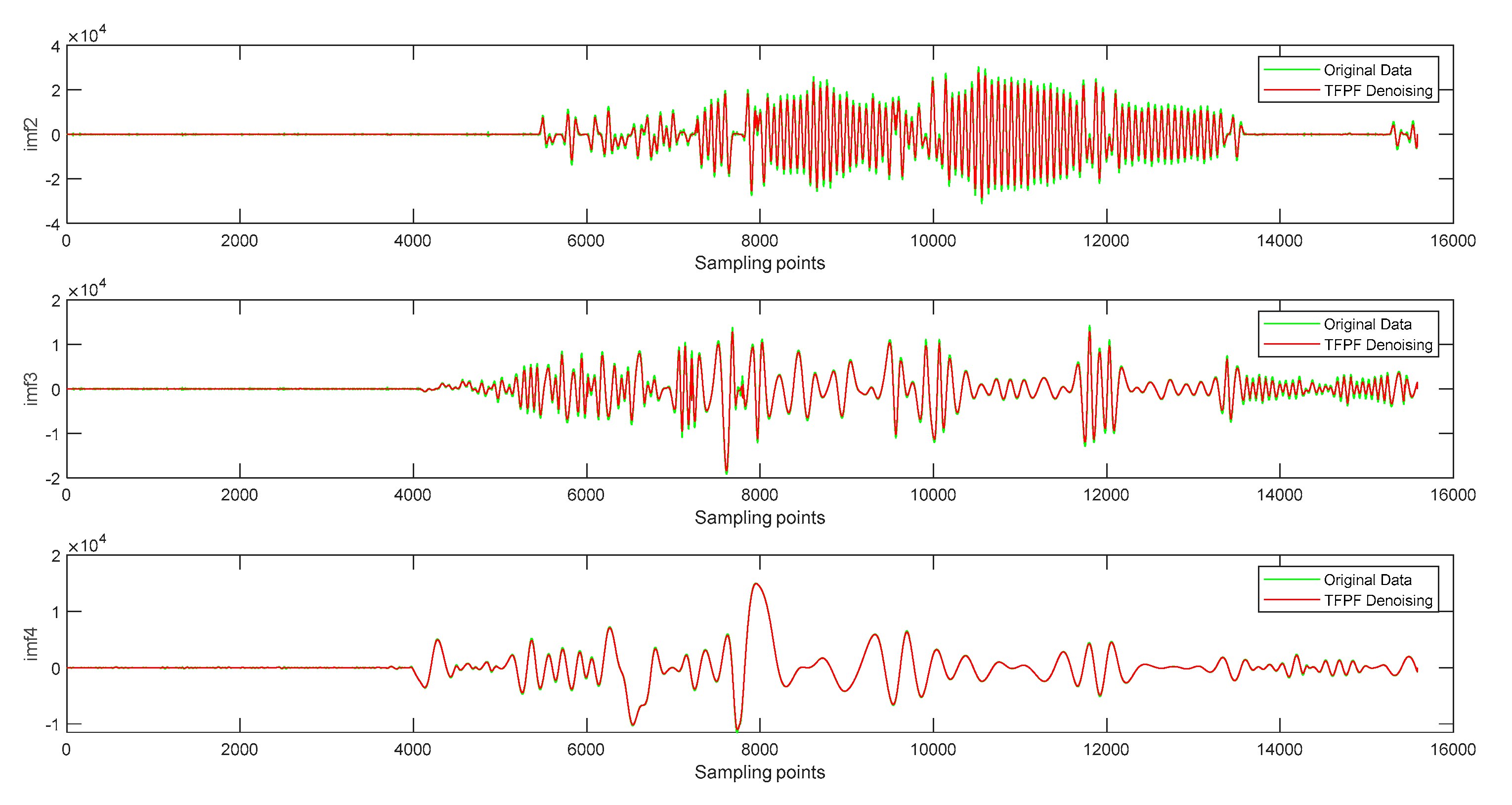
3.2. Time-Frequency Peak Filtering
3.3. The EMD-TFPF Fusion Algorithm
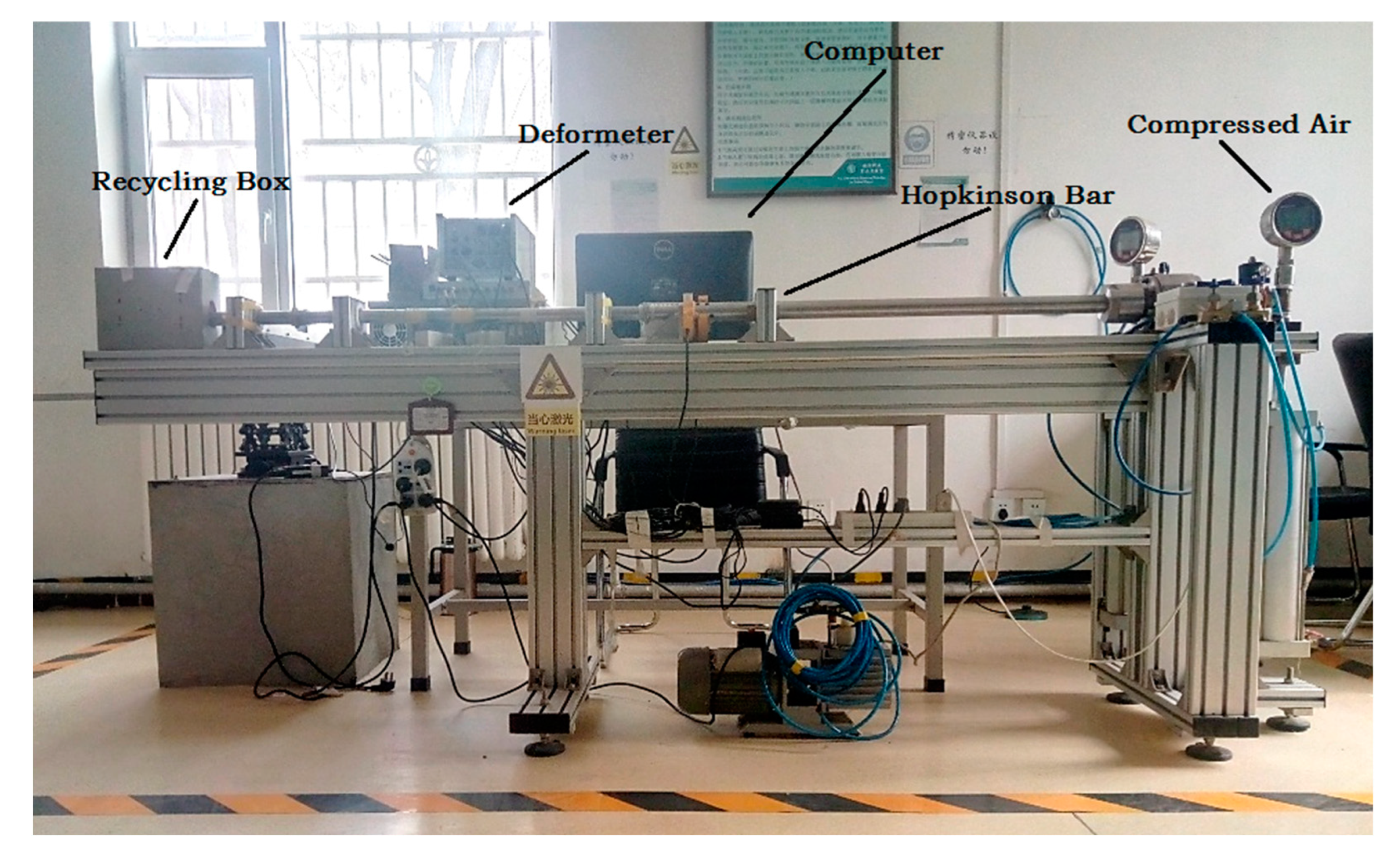
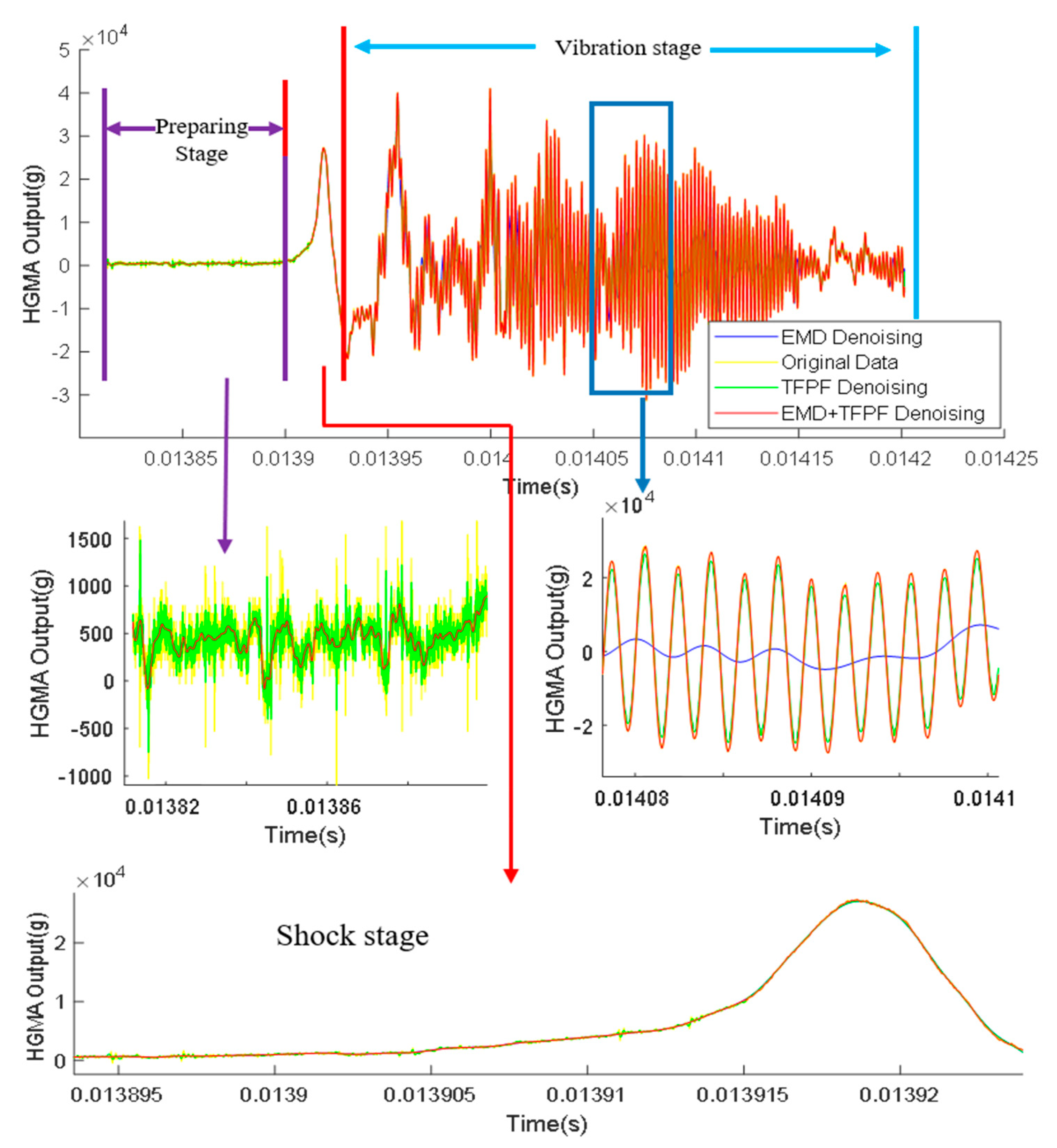
4. Experiment and Signal Processing
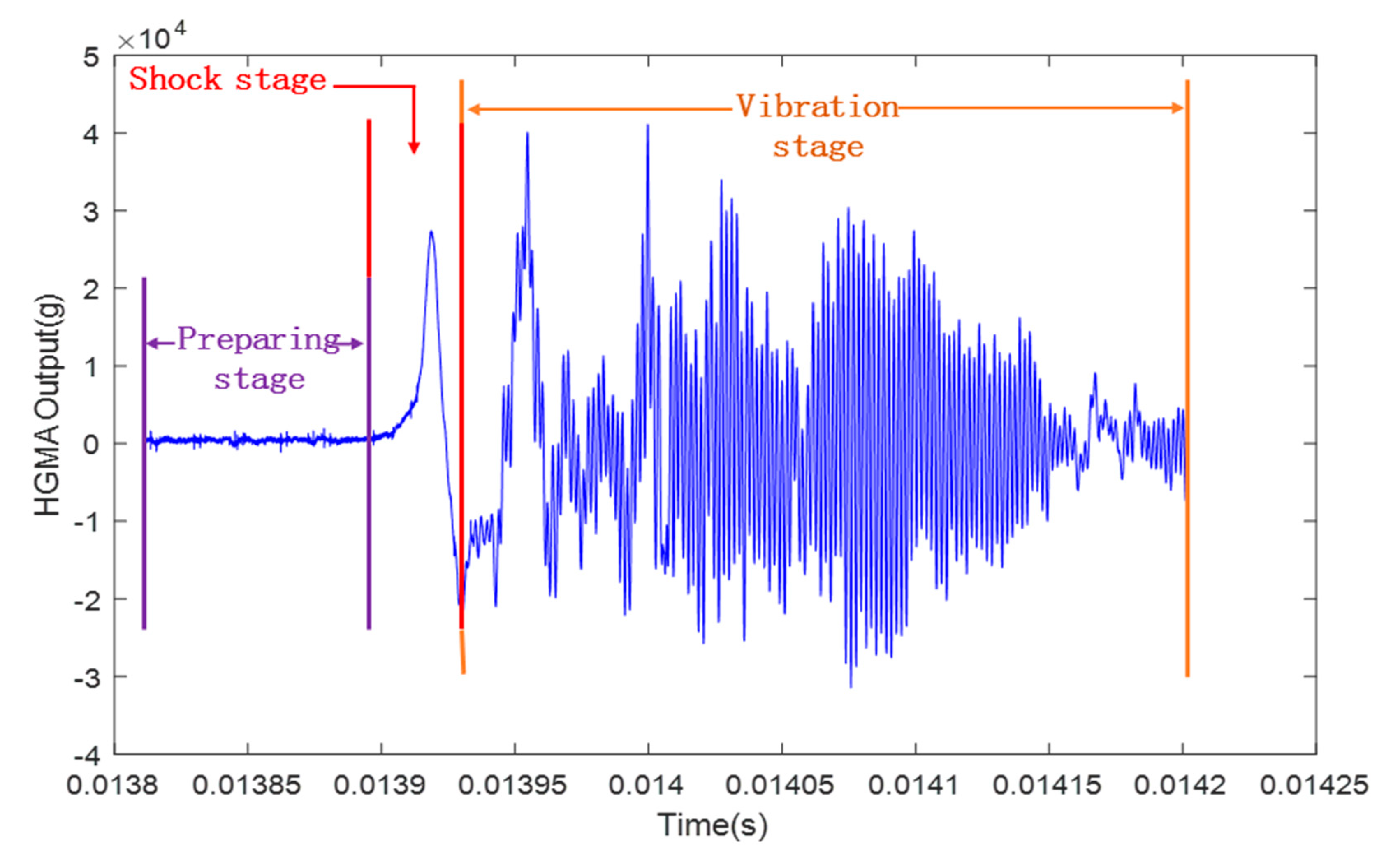
- Preparation stage: this part mainly includes the bias characteristics of the HGMA. The noise signal is included. The maximum peak noise is approximately 1000 g.
- Shock stage: this stage is the main part of the accelerometer calibration experiment; the output peak value is about 28,030 g and the pulse width is about 10 μs.
- Vibration stage: this part mainly captures the vibration information for the HGMA, reflecting the dynamic characteristics of the HGMA.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, H.; Shi, R.; Zhou, J.; Yang, Y.; Song, R.; Chen, J.; Wu, G.; Zhang, J. Attitude Determination Method Integrating Square-Root Cubature Kalman Filter with Expectation-Maximization for Inertial Navigation System Applied to Underwater Glider. Rev. Sci. Instrum. 2019, 90, 095001. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Liu, X.; Cao, H.; Zhou, Y.; Liu, J.; Tang, J.; Guo, X.; Huang, H.; Chen, X. Brain-like Navigation Scheme Based on MEMS-INS and Place Recognition. Appl. Sci. 2019, 9, 1708. [Google Scholar] [CrossRef]
- Shen, C.; Zhang, Y.; Tang, J.; Cao, H.; Liu, J. Dual-Optimization for a MEMS-INS/GPS System during GPS Outages Based on the Cubature Kalman Filter and Neural Networks. Mech. Syst. Signal Proc. 2019, 133, 106222. [Google Scholar] [CrossRef]
- Wang, Q.; Vogt, H. With PECVD Deposited Poly-SiGe and Poly-Ge Forming Contacts Between MEMS and Electronics. J. Electon. Mater. 2019, 48, 7360–7365. [Google Scholar] [CrossRef]
- Cao, H.; Xue, R.; Cai, Q.; Gao, J.; Zhao, R.; Shi, Y.; Huang, K.; Shao, X.; Shen, C. Design and Experiment for Dual-Mass MEMS Gyroscope Sensing Closed-Loop System. IEEE Access 2020, 8, 48074–48087. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Shen, C.; Liu, Y.; Wang, X. Temperature Energy Influence Compensation for MEMS Vibration Gyroscope Based on RBF NN-GA-KF Method. Shock Vib. 2018, 2018, 2830686. [Google Scholar] [CrossRef]
- Shi, Y.; Wen, X.; Zhao, Y.; Zhao, R.; Cao, H.; Liu, J. Investigation and Experiment of High Shock Packaging Technology for High-G MEMS Accelerometer. IEEE Sens. J. 2020, 20, 9029–9037. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, Y.; Feng, H.; Zhao, R.; Cao, H.; Liu, J. Design, Fabrication and Test of a Low Range Capacitive Accelerometer with Anti-Overload Characteristics. IEEE Access 2020, 8, 26085–26093. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, X.; Ding, Y.; Jiang, Z.; Ren, J. A Low Noise Capacitive MEMS Accelerometer with Anti-Spring Structure. Sens. Actuators A Phys. 2019, 296, 79–86. [Google Scholar] [CrossRef]
- Rao, K.; Wei, X.; Zhang, S.; Zhang, M.; Hu, C.; Liu, H.; Tu, L.-C. A MEMS Micro-g Capacitive Accelerometer Based on through-Silicon-Wafer-Etching Process. Micromachines 2019, 10, 380. [Google Scholar] [CrossRef]
- Kamada, Y.; Isobe, A.; Oshima, T.; Furubayashi, Y.; Ido, T.; Sekiguchi, T. Capacitive MEMS Accelerometer with Perforated and Electrically Separated Mass Structure for Low Noise and Low Power. J. Microelectromech. Syst. 2019, 28, 401–408. [Google Scholar] [CrossRef]
- Yeh, C.Y.; Huang, J.T.; Tseng, S.-H.; Wu, P.-C.; Tsai, H.-H.; Jualng, Y.-Z. A Low-Power Monolithic Three-Axis Accelerometer with Automatically Sensor Offset Compensated and Interface Circuit. Microelectron. J. 2019, 86, 150–160. [Google Scholar] [CrossRef]
- Utz, A.; Walk, C.; Stanitzki, A.; Mokhtari, M.; Kraft, M.; Kokozinski, R. A High-Precision and High-Bandwidth MEMS-Based Capacitive Accelerometer. IEEE Sens. J. 2018, 18, 6533–6539. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, L.; Wang, B. A Low Power Accelerometer System with Hybrid Signal Output. IEICE Electron. Express 2018, 15, 20171091. [Google Scholar] [CrossRef]
- Najafi, A.; Keighobadi, J. Full-State-Feedback, Fuzzy Type I and Fuzzy Type II Control of MEMS Accelerometer. J. Mech. Sci. Technol. 2018, 32, 793–798. [Google Scholar] [CrossRef]
- Edalafar, F.; Azimi, S.; Qureshi, A.Q.A.; Yaghootkar, B.; Keast, A.; Friedrich, W.; Leung, A.M.; Bahreyni, B. A Wideband, Low-Noise Accelerometer for Sonar Wave Detection. IEEE Sens. J. 2018, 18, 508–516. [Google Scholar] [CrossRef]
- Yan, Z.; Hou, B.; Zhang, J.; Shen, C.; Shi, Y.; Tang, J.; Cao, H.; Liu, J. MEMS Accelerometer Calibration Denoising Method for Hopkinson Bar System Based on LMD-SE-TFPF. IEEE Access 2019, 7, 113901–113915. [Google Scholar] [CrossRef]
- Guo, H.; Hong, H. Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion. Sensors 2019, 19, 3552. [Google Scholar] [CrossRef]
- Zou, Y.; Chen, Y.; Liu, P. Refactoring and Optimization of Bridge Dynamic Displacement Based on Ensemble Empirical Mode Decomposition. Sensors 2019, 19, 3125. [Google Scholar] [CrossRef]
- Ding, H.; Wang, Y.; Yang, Z.; Pfeiffer, O. Nonlinear Blind Source Separation and Fault Feature Extraction Method for Mining Machine Diagnosis. Appl. Sci. 2019, 9, 1852. [Google Scholar] [CrossRef]
- Shen, C.; Song, R.; Li, J.; Zhang, X.; Tang, J.; Shi, Y.; Liu, J.; Cao, H. Temperature Drift Modeling of MEMS Gyroscope Based on Genetic-Elman Neural Network. Mech. Syst. Signal Proc. 2016, 72–73, 897–905. [Google Scholar] [CrossRef]
- Jiang, C.; Chen, S.; Chen, Y.; Zhang, B.; Feng, Z.; Zhou, H.; Bo, Y. A MEMS IMU De-Noising Method Using Long Short Term Memory Recurrent Neural Networks (LSTM-RNN). Sensors 2018, 18, 3470. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.; Pang, L.; Huang, H.; Shen, C.; Cao, H.; Shi, Y.; Liu, J. High-G Calibration Denoising Method for High-G MEMS Accelerometer Based on EMD and Wavelet Threshold. Micromachines 2019, 10, 134. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Pang, L.; Xiao, Z.; Shen, C.; Cao, H.; Shi, Y.; Liu, J. Temperature Drift Compensation for High-G MEMS Accelerometer Based on RBF NN Improved Method. Appl. Sci. 2019, 9, 695. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, H.; Feng, L.; Wang, X.; Zhang, Y. Noise Suppression of a Micro-Grating Accelerometer Based on the Dual Modulation Method. Appl. Opt. 2017, 56, 10003–10008. [Google Scholar] [CrossRef]
- Mokhtari, E.; Elhabiby, M.; Sideris, M.G. Wavelet Spectral Techniques for Error Mitigation in the Superconductive Angular Accelerometer Output of a Gravity Gradiometer System. IEEE Sens. J. 2017, 17, 3782–3793. [Google Scholar] [CrossRef]
- He, J.; Bai, S.; Wang, X. An Unobtrusive Fall Detection and Alerting System Based on Kalman Filter and Bayes Network Classifier. Sensors 2017, 17, 1393. [Google Scholar] [CrossRef]
- Abbasi-Kesbi, R.; Nikfarjam, A. Denoising MEMS Accelerometer Sensors Based on L2-Norm Total Variation Algorithm. Electron. Lett. 2017, 53, 322–323. [Google Scholar] [CrossRef]
- Kou, Y.; Kou, Z.; Yang, J. Hybrid De-Noising Algorithm Based on FLP, Grey AGO and LWT. J. Grey Syst. 2017, 29, 125. [Google Scholar]
- Shen, C.; Yang, J.; Tang, J.; Liu, J.; Cao, H. Note: Parallel Processing Algorithm of Temperature and Noise Error for Micro-Electro-Mechanical System Gyroscope Based on Variational Mode Decomposition and Augmented Nonlinear Differentiator. Rev. Sci. Instrum. 2018, 89, 076107. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J.; Cai, W.; Zhou, J.; Du, W.; Wang, J.; He, G.; He, H. Application of an Improved Ensemble Local Mean Decomposition Method for Gearbox Composite Fault Diagnosis. Complexity 2019, 2019, 1564243. [Google Scholar] [CrossRef]
- Cao, H.; Li, H.; Liu, J.; Shi, Y.; Tang, J.; Shen, C. An Improved Interface and Noise Analysis of a Turning Fork Microgyroscope Structure. Mech. Syst. Signal Proc. 2016, 70–71, 1209–1220. [Google Scholar] [CrossRef]
- Wang, Z.; Du, W.; Wang, J.; Zhou, J.; Han, X.; Zhang, Z.; Huang, L. Research and Application of Improved Adaptive MOMEDA Fault Diagnosis Method. Measurement 2019, 140, 63–75. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Zhang, Y.; Shao, X.; Gao, J.; Huang, K.; Shi, Y.; Tang, J.; Shen, C.; Liu, J. Design and Experiment of Dual-Mass MEMS Gyroscope Sense Closed System Based on Bipole Compensation Method. IEEE Access 2019, 7, 49111–49124. [Google Scholar] [CrossRef]
- Cai, Q.; Zhao, F.; Kang, Q.; Luo, Z.; Hu, D.; Liu, J.; Cao, H. A Novel Parallel Processing Model for Noise Reduction and Temperature Compensation of MEMS Gyroscope. Micromachines 2021, 12, 1285. [Google Scholar] [CrossRef]
- Shen, C.; Cao, H.; Li, J.; Tang, J.; Zhang, X.; Shi, Y.; Yang, W.; Liu, J. Hybrid De-Noising Approach for Fiber Optic Gyroscopes Combining Improved Empirical Mode Decomposition and Forward Linear Prediction Algorithms. Rev. Sci. Instrum. 2016, 87, 033305. [Google Scholar] [CrossRef]
- Cao, H.; Liu, Y.; Liu, L.; Wang, X. Humidity Drift Modeling and Compensation of MEMS Gyroscope Based on IAWTD-CSVM-EEMD Algorithms. IEEE Access 2021, 9, 95686–95701. [Google Scholar] [CrossRef]
- Ma, T.; Cao, H.; Shen, C. A Temperature Error Parallel Processing Model for MEMS Gyroscope Based on a Novel Fusion Algorithm. Electronics 2020, 9, 499. [Google Scholar] [CrossRef]
- Cao, H.; Wei, W.; Liu, L.; Ma, T.; Zhang, Z.; Zhang, W.; Shen, C.; Duan, X. A Temperature Compensation Approach for Dual-Mass MEMS Gyroscope Based on PE-LCD and ANFIS. IEEE Access 2021, 9, 95180–95193. [Google Scholar] [CrossRef]
- Ma, T.; Li, Z.; Cao, H.; Shen, C.; Wang, Z. A Parallel Denoising Model for Dual-Mass MEMS Gyroscope Based on PE-ITD and SA-ELM. IEEE Access 2019, 7, 169979–169991. [Google Scholar] [CrossRef]
- Shi, Y.; Yang, Z.; Ma, Z.; Cao, H.; Kou, Z.; Zhi, D.; Chen, Y.; Feng, H.; Liu, J. The Development of a Dual-Warhead Impact System for Dynamic Linearity Measurement of a High-g Micro-Electro-Mechanical-Systems (MEMS) Accelerometer. Sensors 2016, 16, 840. [Google Scholar] [CrossRef] [PubMed]
- Shi, Y.; Zhao, Y.; Feng, H.; Cao, H.; Tang, J.; Li, J.; Zhao, R.; Liu, J. Design, Fabrication and Calibration of a High-G MEMS Accelerometer. Sens. Actuator A Phys. 2018, 279, 733–742. [Google Scholar] [CrossRef]
- Liao, M.; Guo, Y.; Qin, Y.; Wang, Y. The Application of EMD in Activity Recognition Based on a Single Triaxial Accelerometer. Bio-Med. Mater. Eng. 2015, 26, S1533–S1539. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Li, J.; Zhang, X.; Shi, Y.; Tang, J.; Cao, H.; Liu, J. A Noise Reduction Method for Dual-Mass Micro-Electromechanical Gyroscopes Based on Sample Entropy Empirical Mode Decomposition and Time-Frequency Peak Filtering. Sensors 2016, 16, 796. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yue, L.; Lin, H.; Ma, H. An Amplitude-Preserved Time–Frequency Peak Filtering Based on Empirical Mode Decomposition for Seismic Random Noise Reduction. IEEE Geosci. Remote Sens. Letters 2013, 11, 896–900. [Google Scholar] [CrossRef]
- Lin, T.; Zhang, Y.; Muller-Petke, M. Random Noise Suppression of Magnetic Resonance Sounding Oscillating Signal by Combining Empirical Mode Decomposition and Time-Frequency Peak Filtering. IEEE Access 2019, 7, 79917–79926. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Signals and Systems, 2nd ed.; Liu, S., Ed.; Electronic Industry Press: Beijing, China, 2015. [Google Scholar]
- Xiong, M.; Li, Y.; Wu, N. Random-Noise Attenuation for Seismic Data by Local Parallel Radial-Trace TFPF. IEEE Trans. Geosci. Remote Sens. 2013, 52, 4025–4031. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam | Mass | |||||
|---|---|---|---|---|---|---|
| Parameters | length (a1) | width (b1) | height (c1) | length (a2) | width (b2) | height (c1) |
| size/μm | 350 | 800 | 80 | 800 | 800 | 200 |
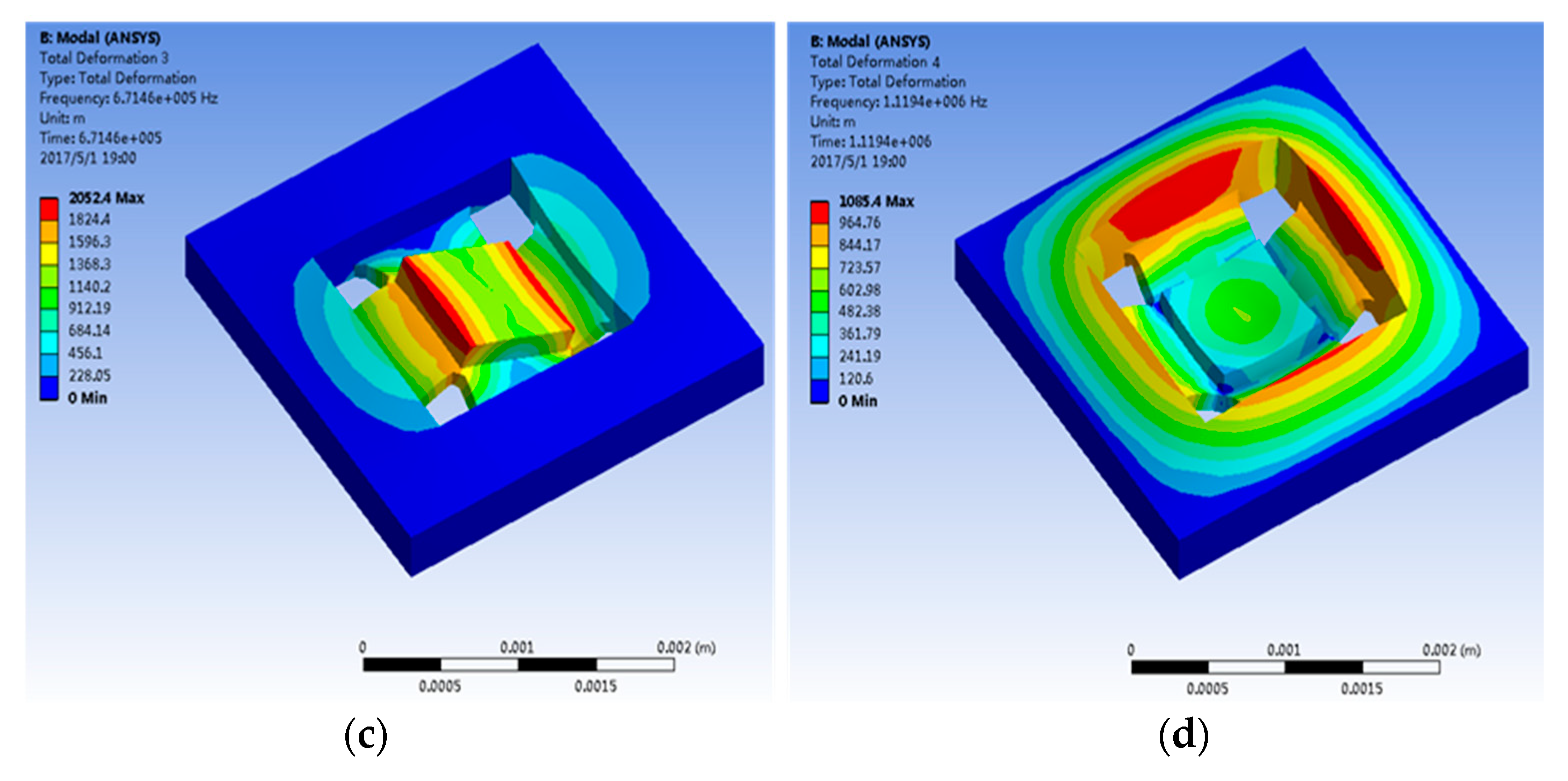
| Mode Shapes | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Resonant Frequency /kHz | 408 | 667 | 671 | 1119 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Cui, Y.; Liu, Y.; Li, K.; Shen, C. High-G MEMS Accelerometer Calibration Denoising Method Based on EMD and Time-Frequency Peak Filtering. Micromachines 2023, 14, 970. https://doi.org/10.3390/mi14050970
Wang C, Cui Y, Liu Y, Li K, Shen C. High-G MEMS Accelerometer Calibration Denoising Method Based on EMD and Time-Frequency Peak Filtering. Micromachines. 2023; 14(5):970. https://doi.org/10.3390/mi14050970
Chicago/Turabian StyleWang, Chenguang, Yuchen Cui, Yang Liu, Ke Li, and Chong Shen. 2023. "High-G MEMS Accelerometer Calibration Denoising Method Based on EMD and Time-Frequency Peak Filtering" Micromachines 14, no. 5: 970. https://doi.org/10.3390/mi14050970