
A Nonlinear Impact-Driven Triboelectric Vibration Energy Harvester for Frequency Up-Conversion

Abstract
:1. Introduction
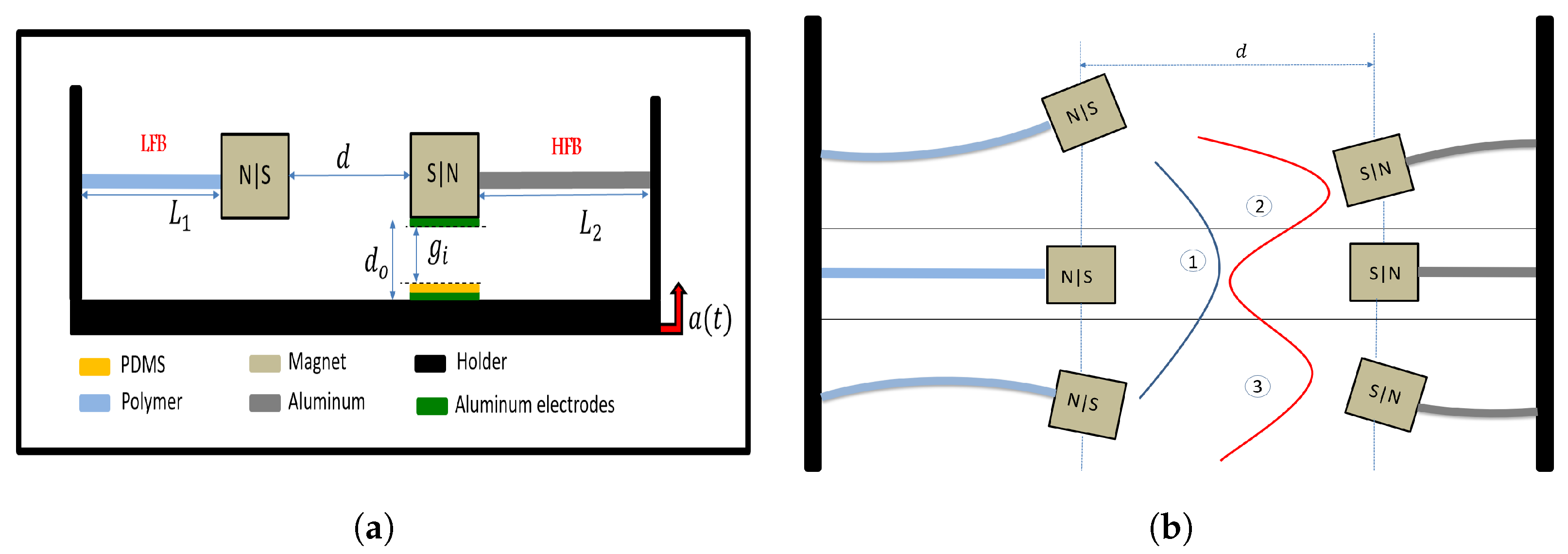
2. Device Configuration and Principle of Operation
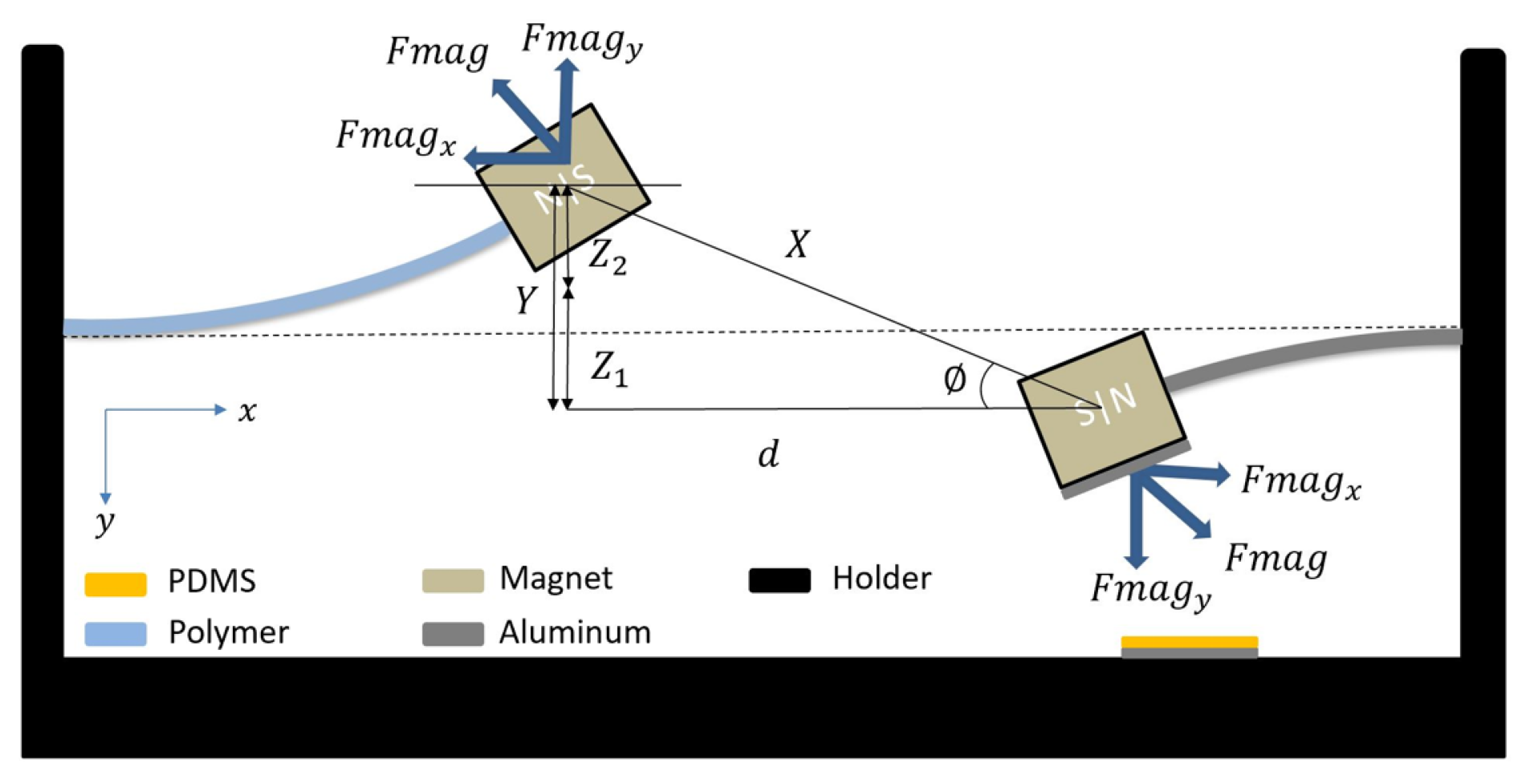
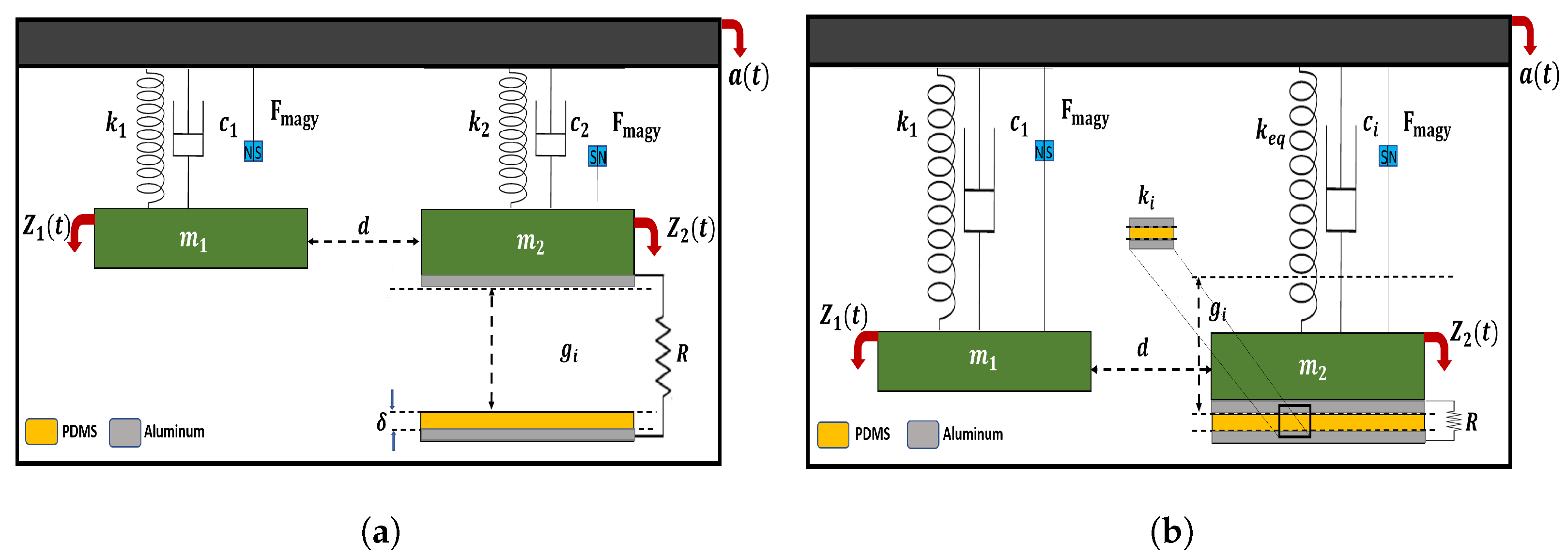
3. Theoretical Model
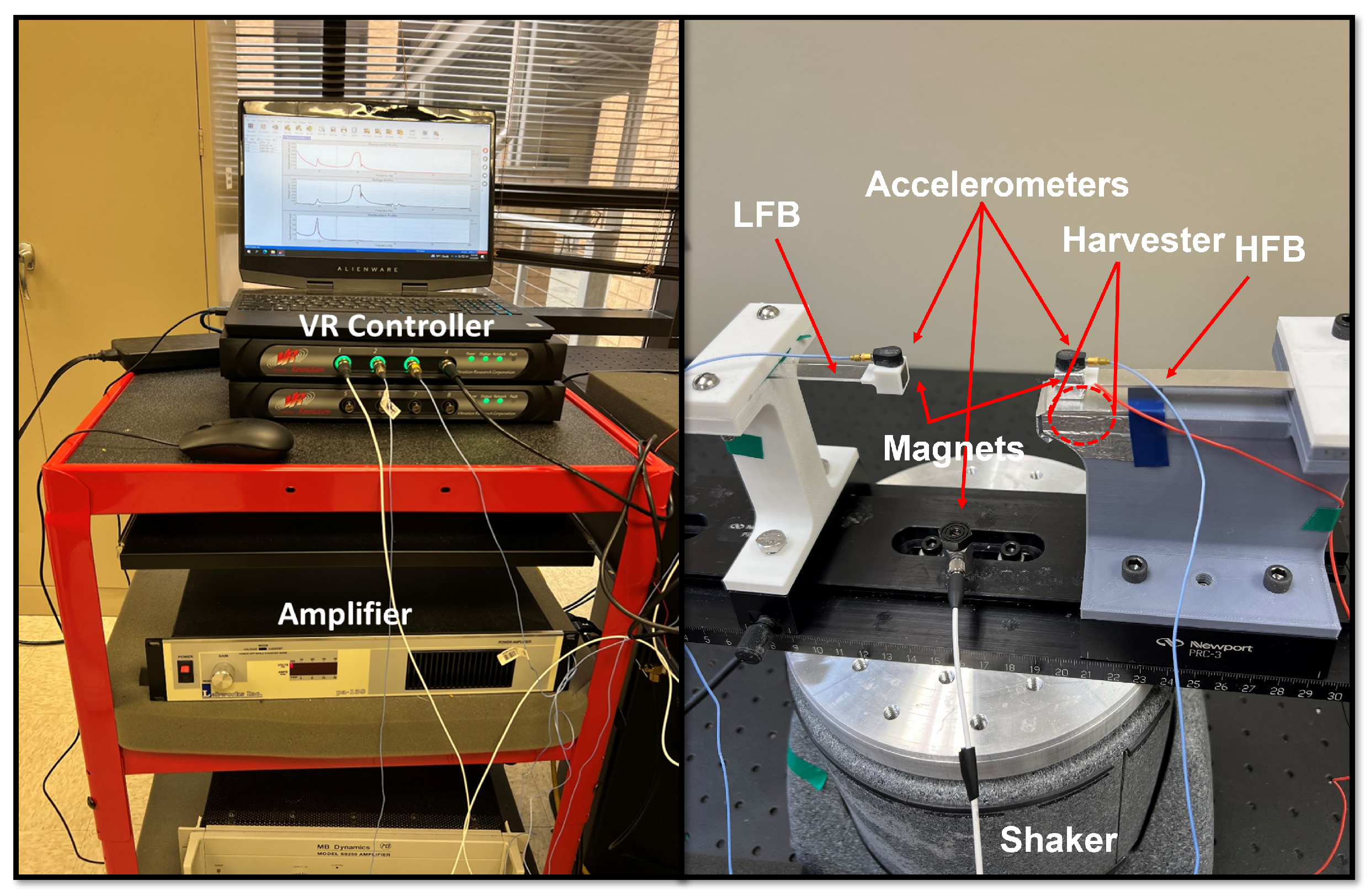
4. Experimental Setup
5. Results and Discussion
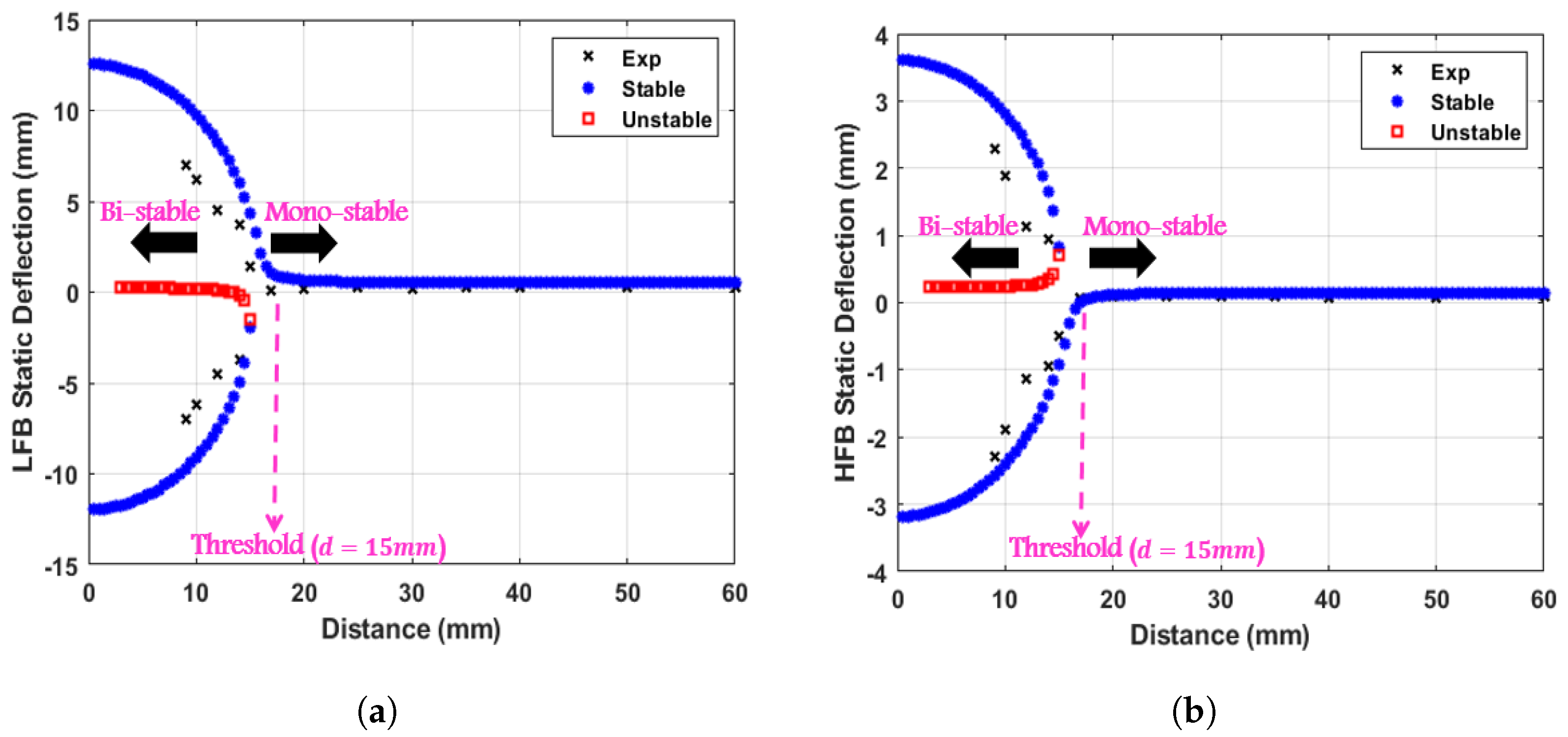
5.1. Static Analysis
5.2. Dynamic Analysis
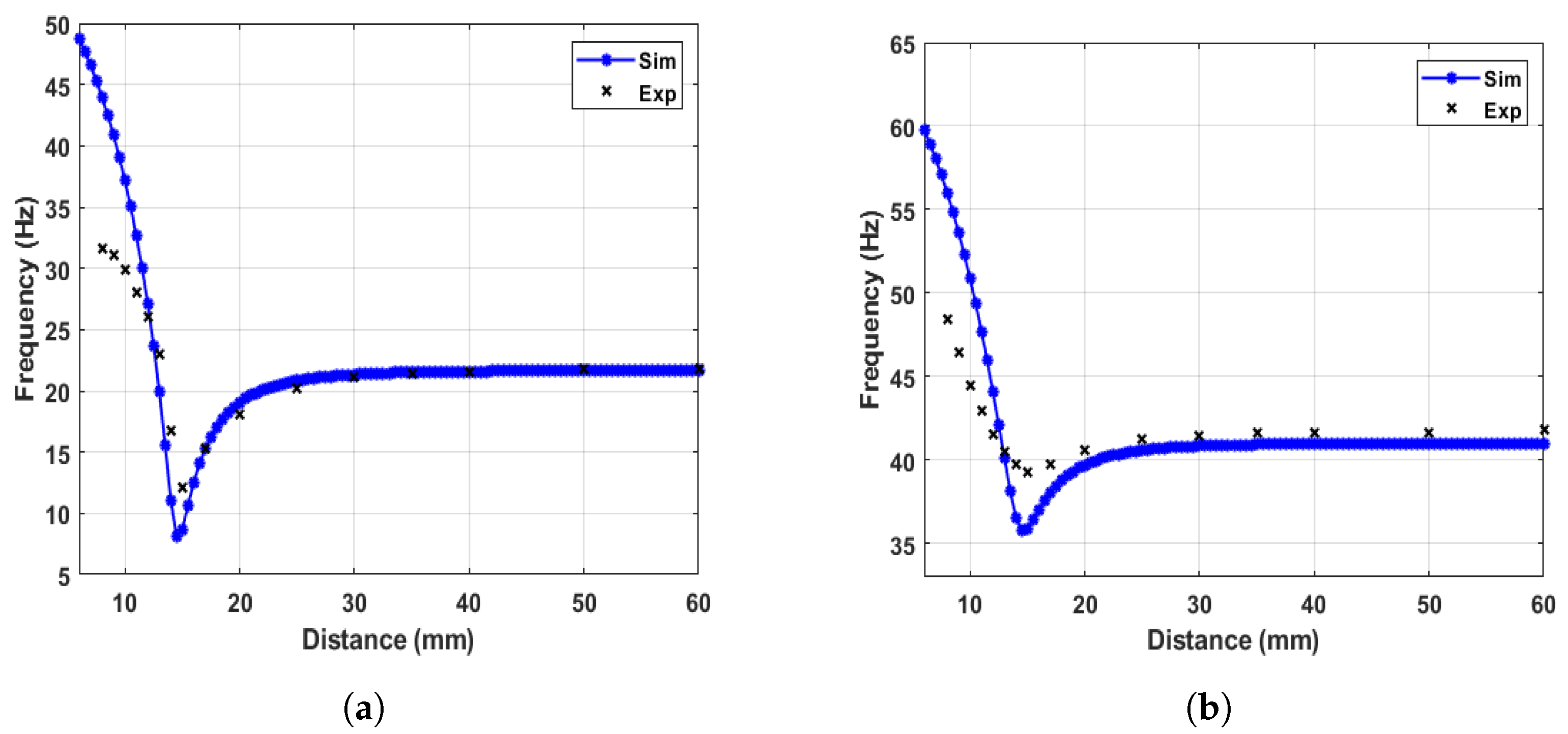
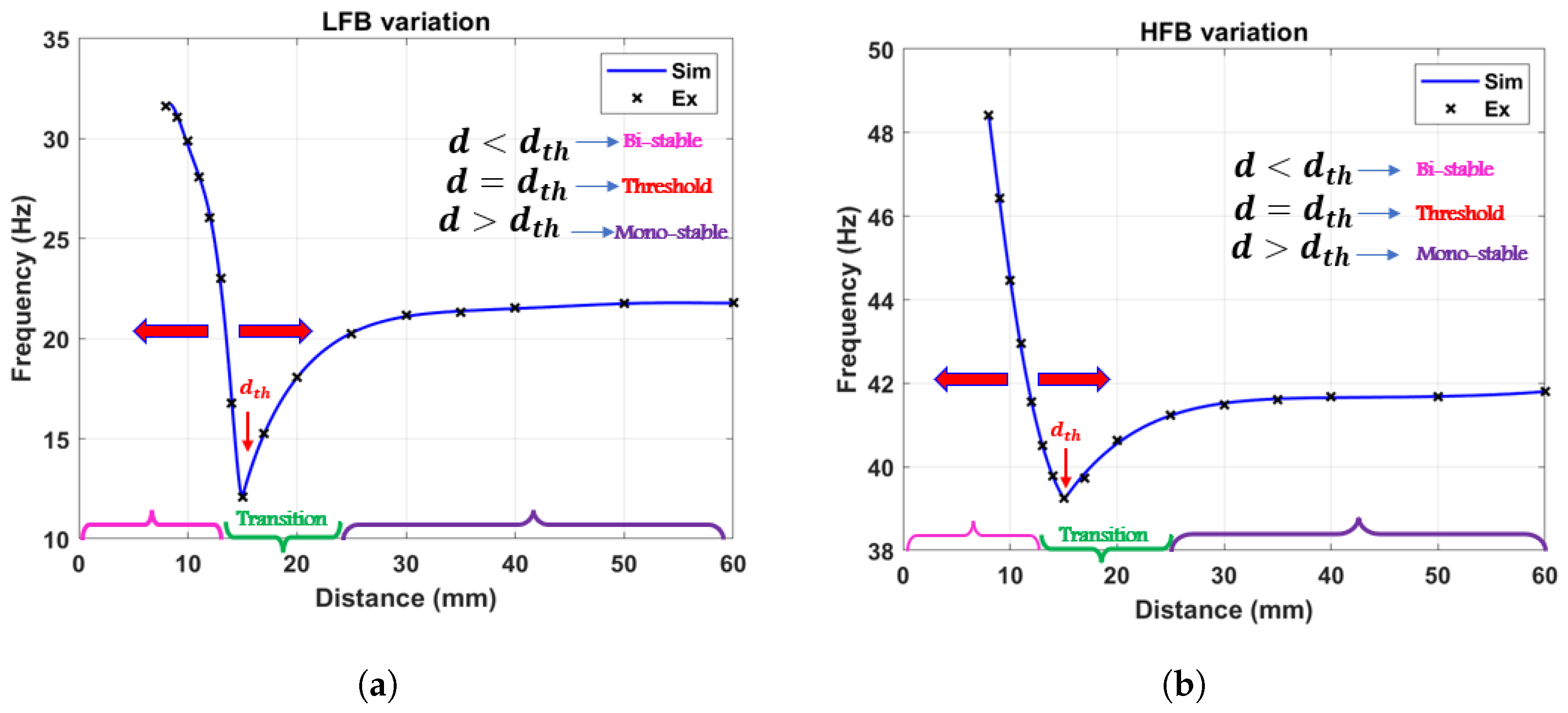
5.2.1. Natural Frequencies
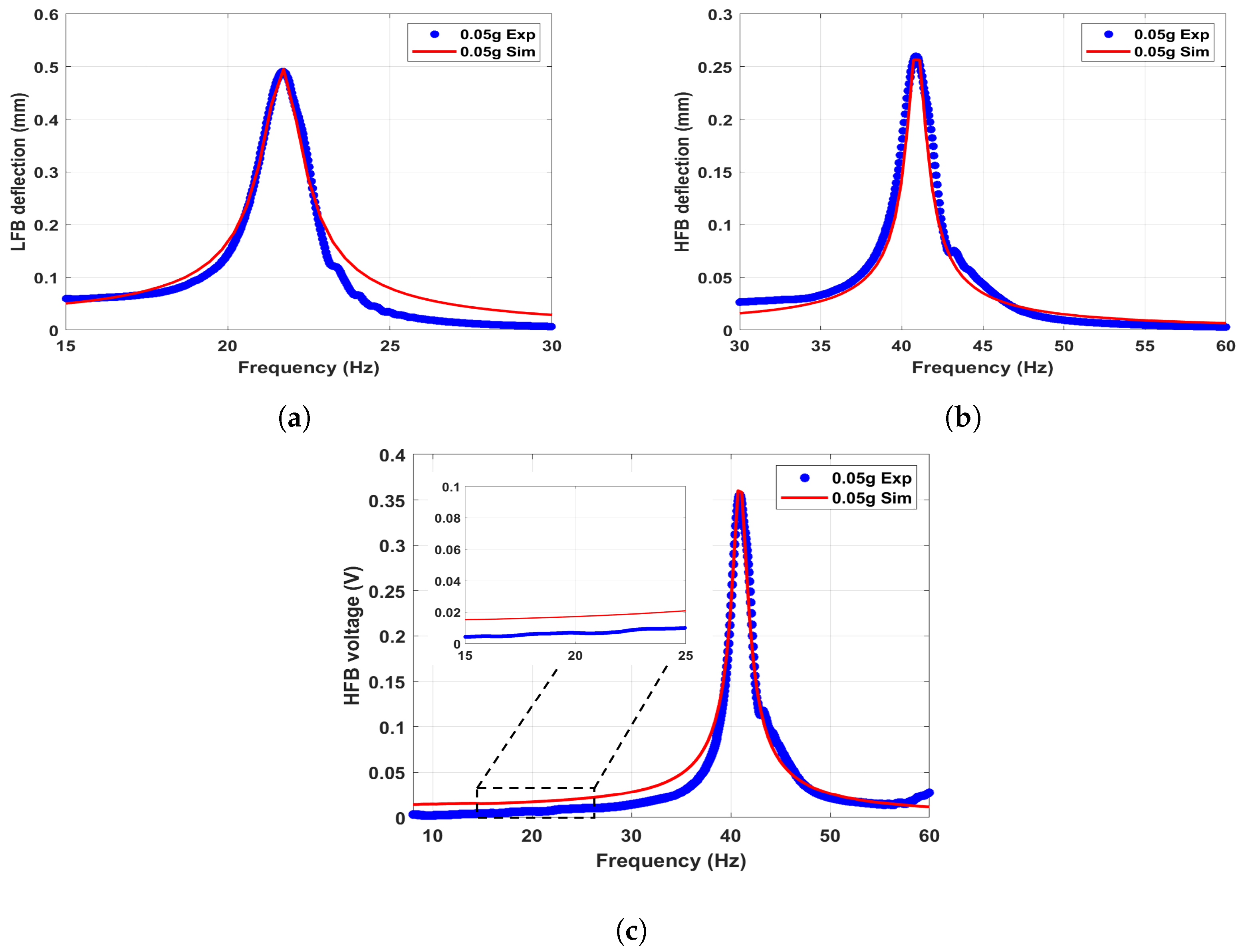
5.2.2. Linear Results
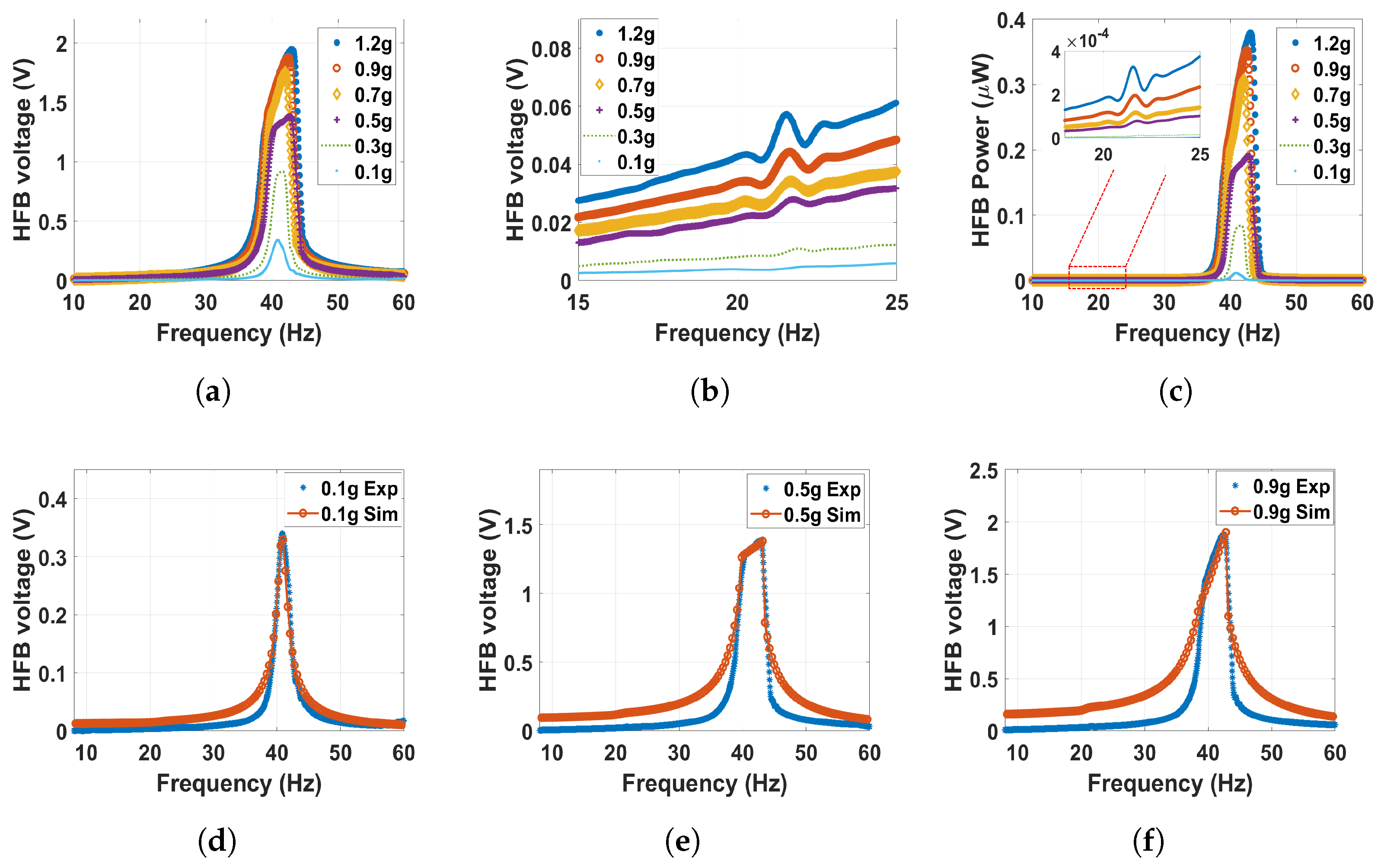
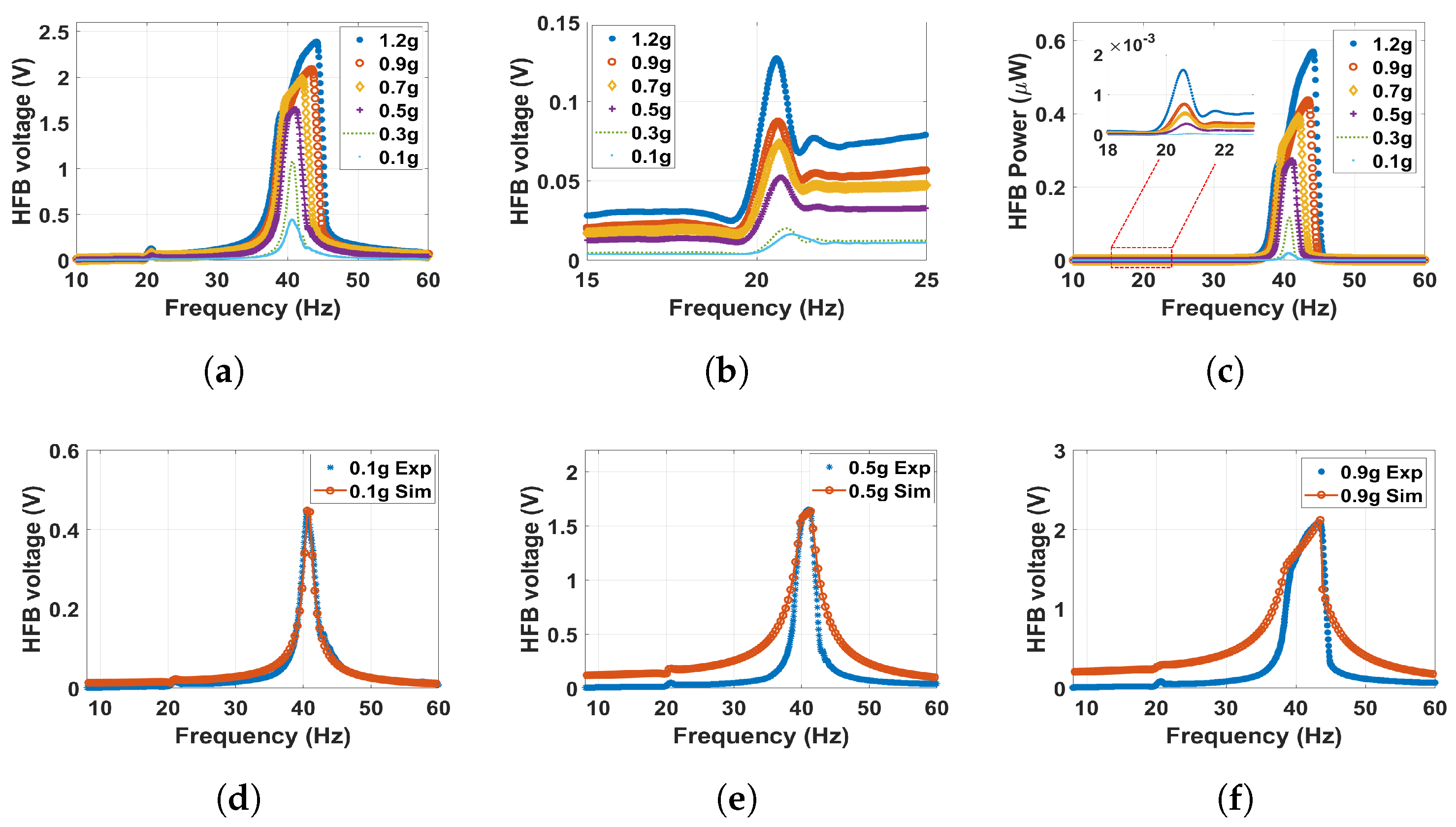
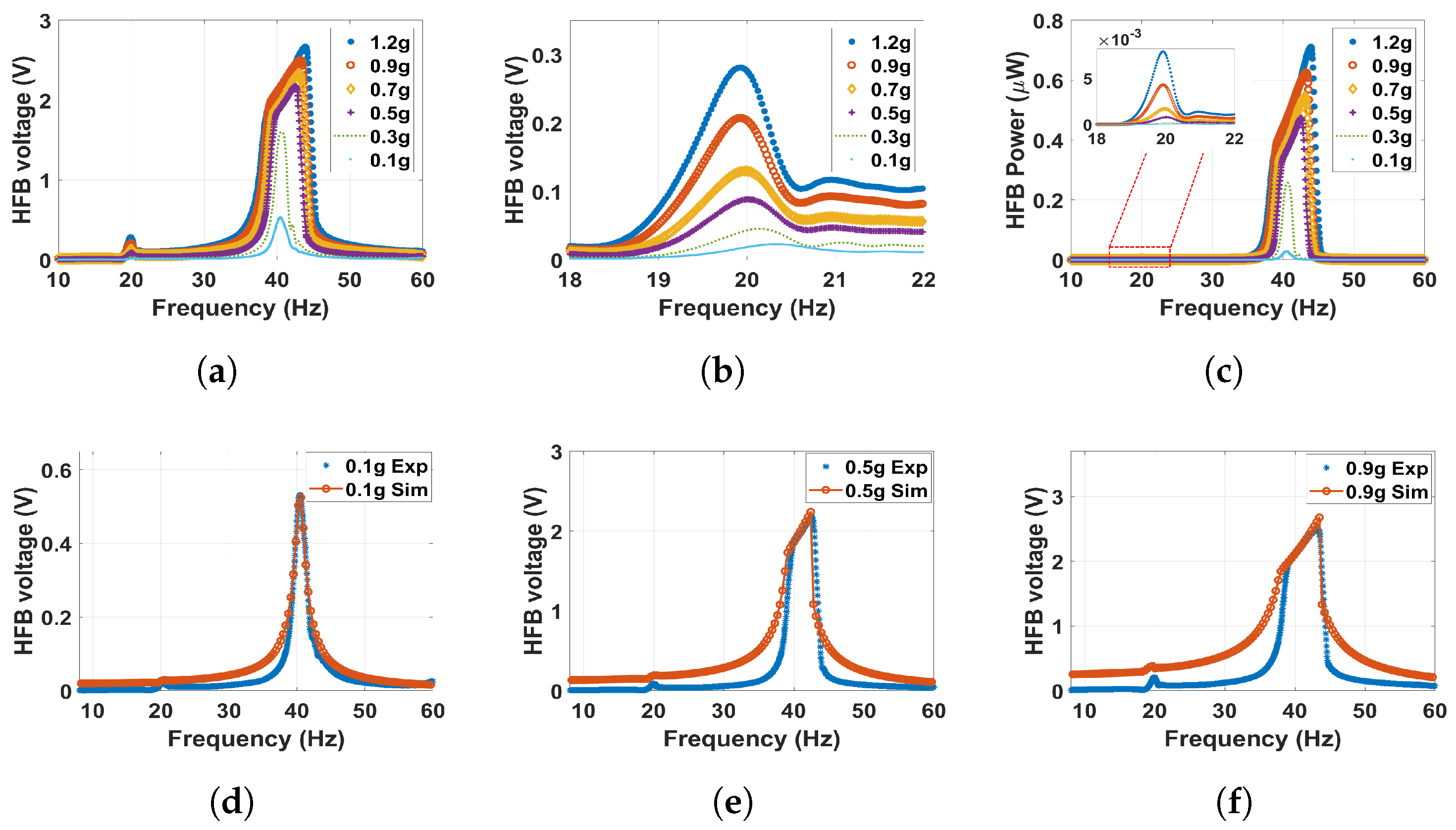
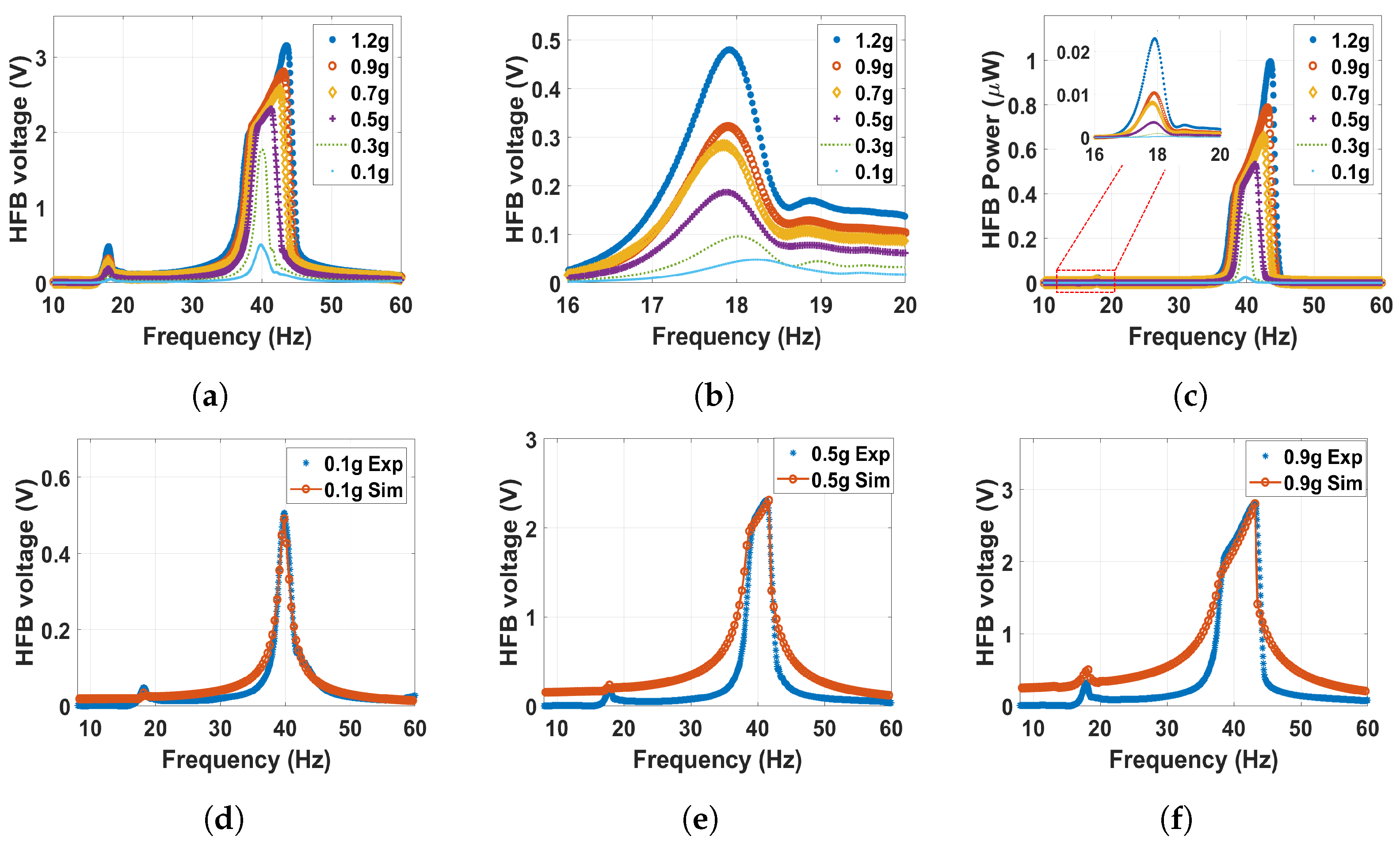
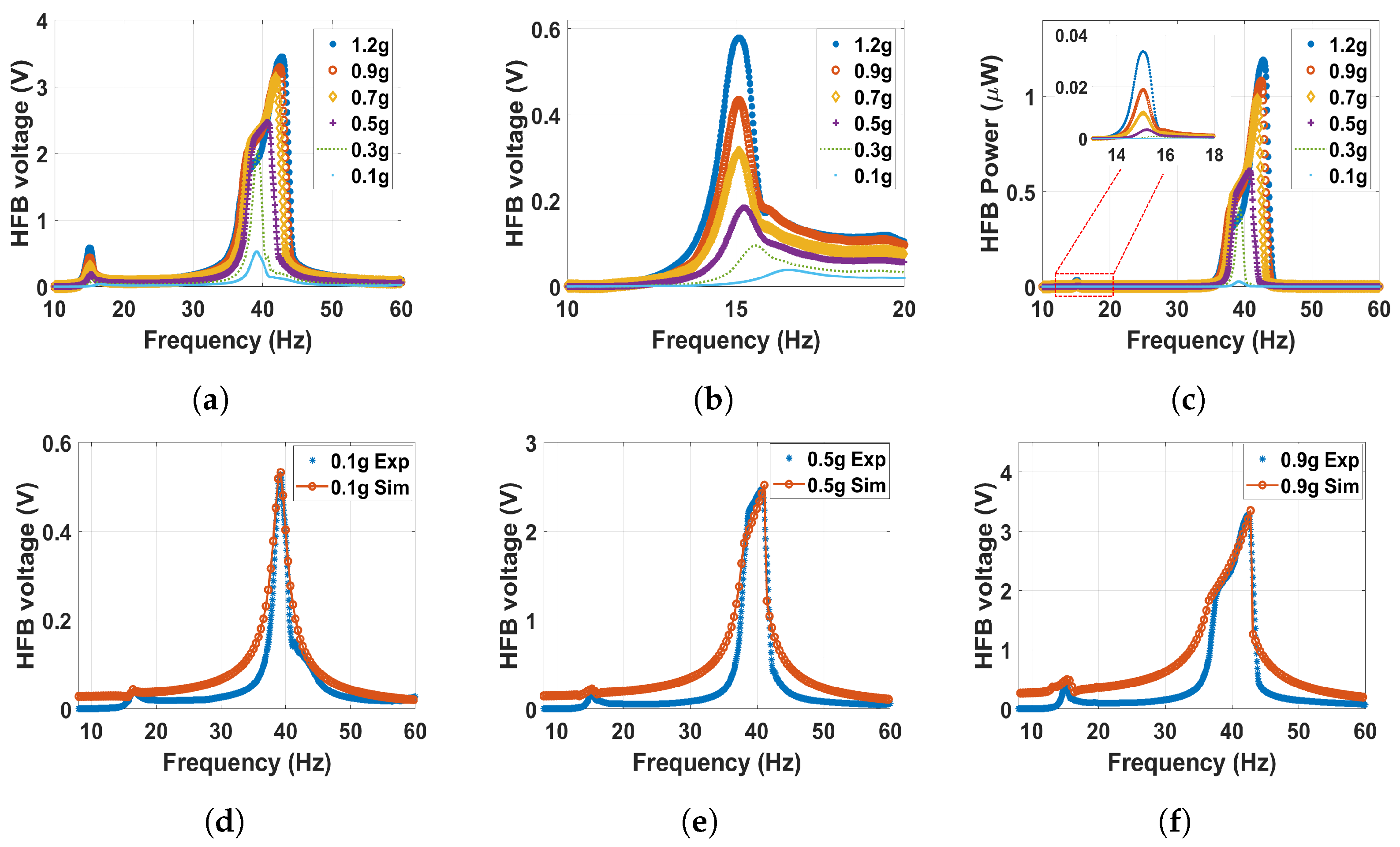
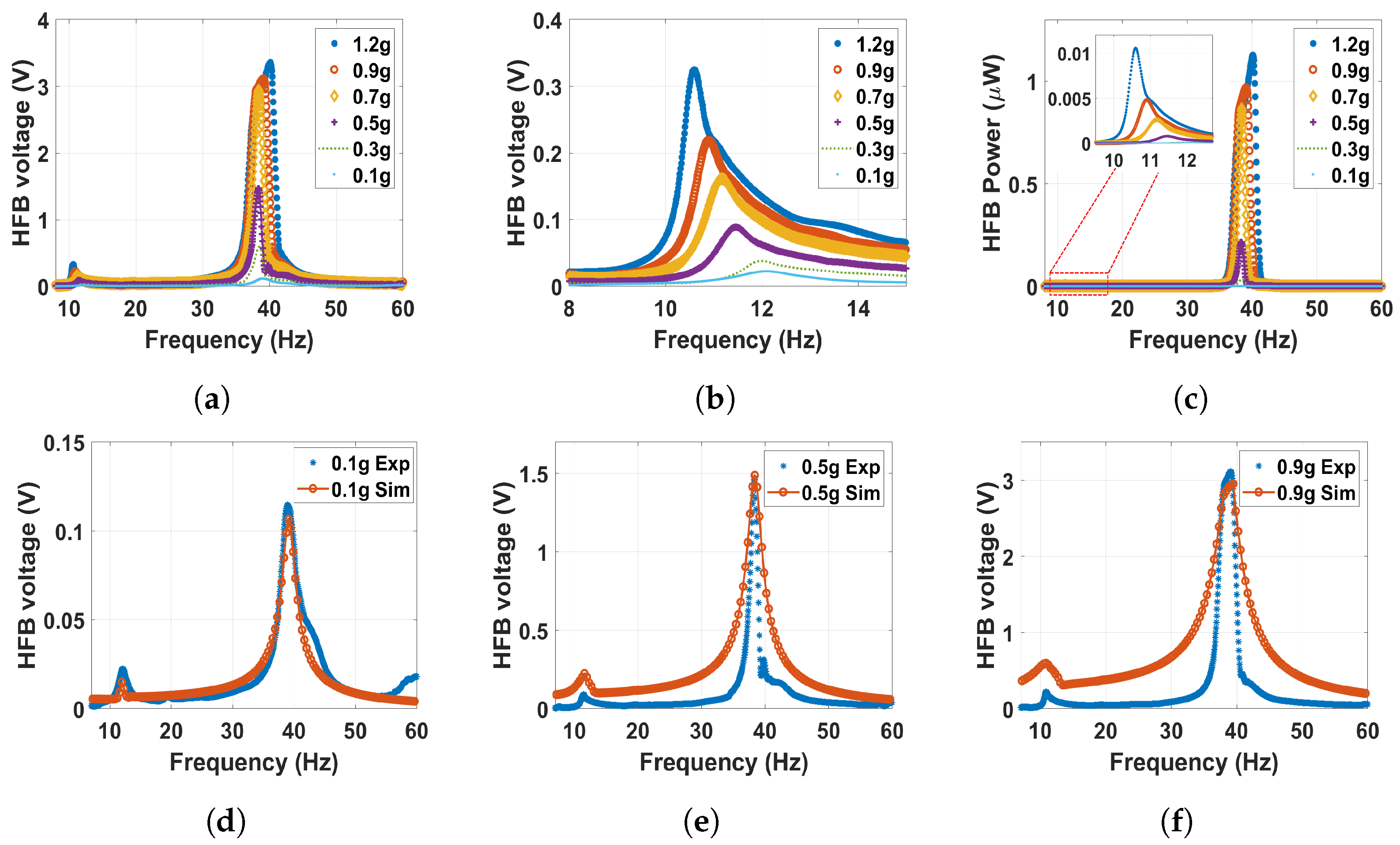
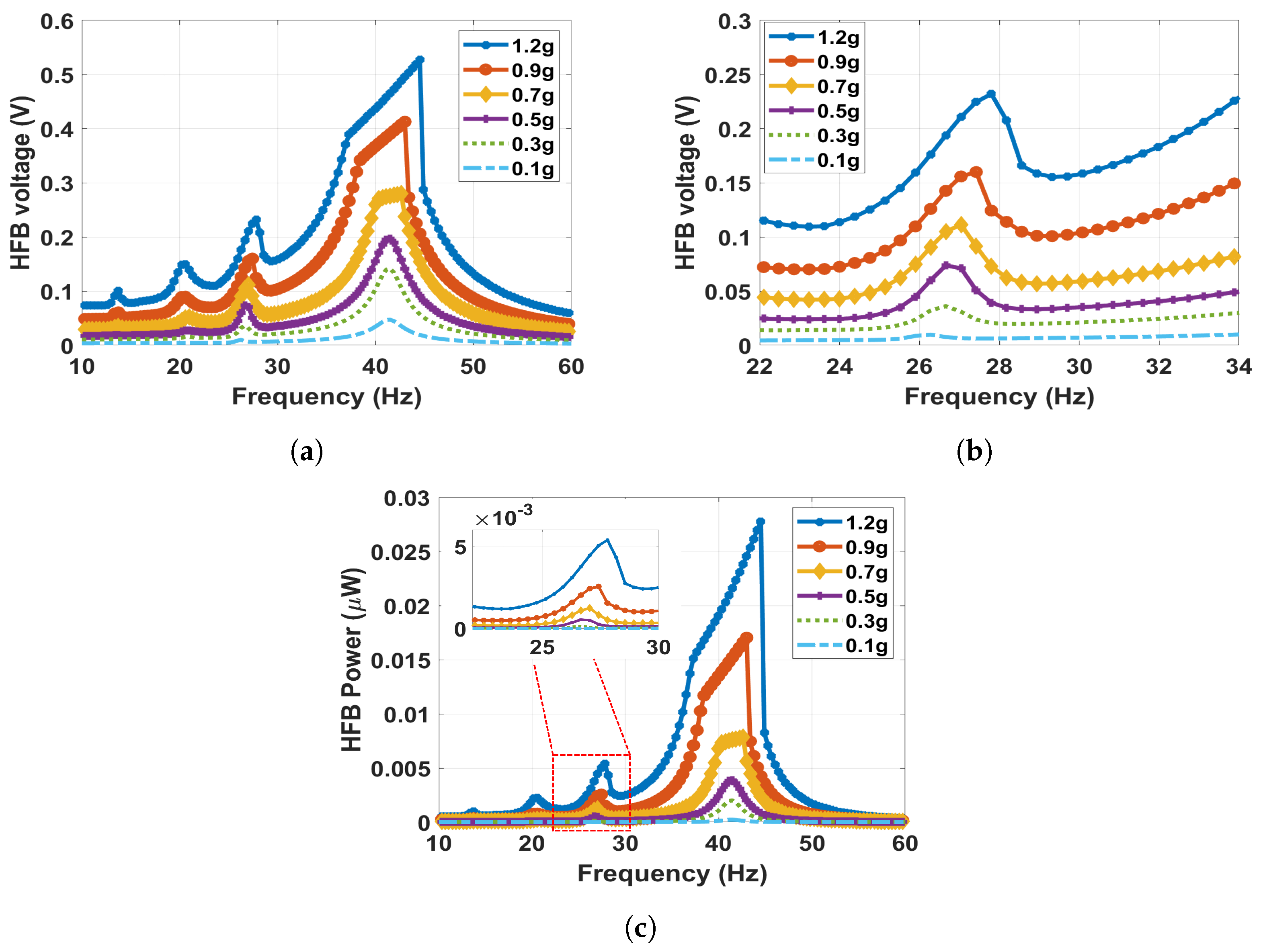
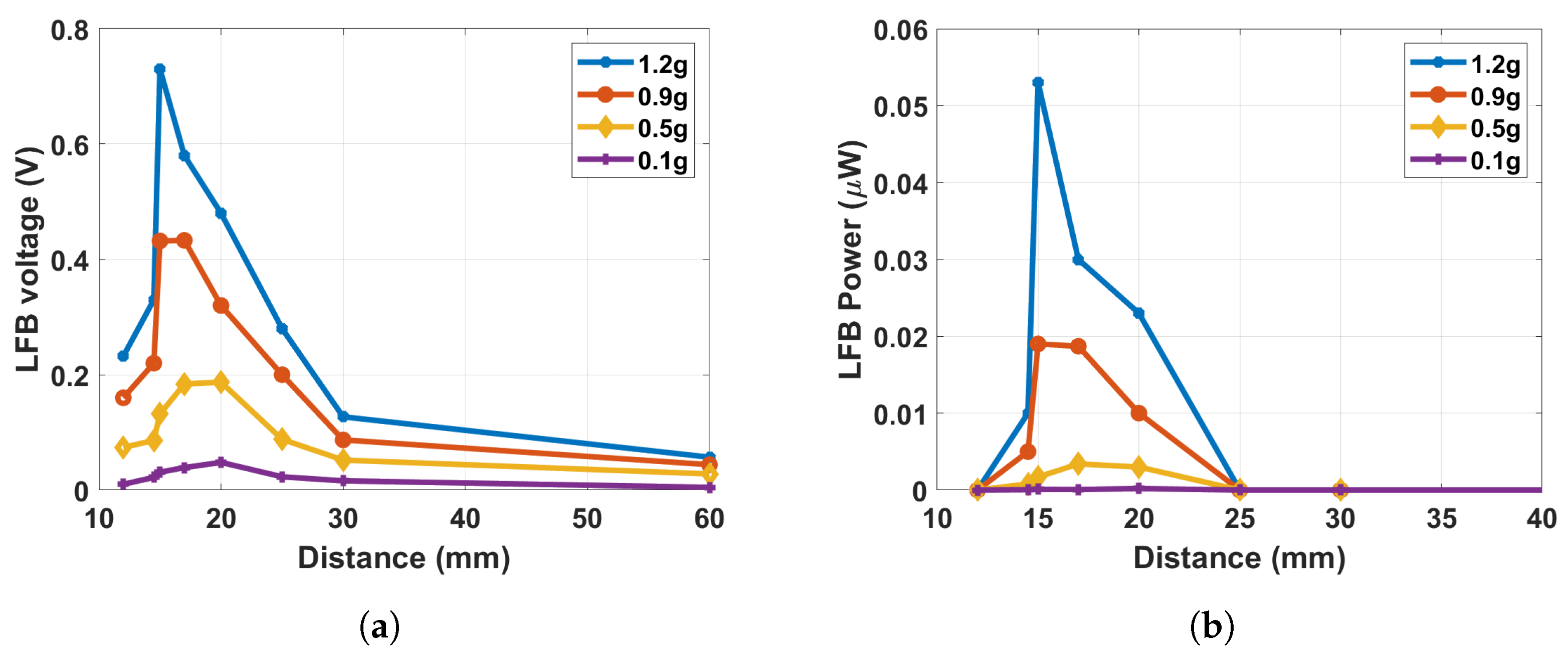
5.2.3. Nonlinear Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sullivan, J.; Gaines, L. A Review of Battery Life-Cycle Analysis: State of Knowledge and Critical Needs; Argonne National Lab. (ANL): Argonne, IL, USA, 2010.
- Abdin, Z.; Alim, M.; Saidur, R.; Islam, M.; Rashmi, W.; Mekhilef, S.; Wadi, A. Solar energy harvesting with the application of nanotechnology. Renew. Sustain. Energy Rev. 2013, 26, 837–852. [Google Scholar] [CrossRef]
- Ibrahim, H.; Singh, M.; Al-Bawri, S.; Ibrahim, S.; Islam, M.; Alzamil, A.; Islam, M. Radio frequency energy harvesting technologies: A comprehensive review on designing, methodologies, and potential applications. Sensors 2022, 22, 4144. [Google Scholar] [CrossRef] [PubMed]
- Cuadras, A.; Gasulla, M.; Ferrari, V. Thermal energy harvesting through pyroelectricity. Sens. Actuators Phys. 2010, 158, 132–139. [Google Scholar] [CrossRef]
- Ambrożkiewicz, B.; Litak, G.; Wolszczak, P. Modelling of electromagnetic energy harvester with rotational pendulum using mechanical vibrations to scavenge electrical energy. Appl. Sci. 2020, 10, 671. [Google Scholar] [CrossRef]
- Hassan, M.; Baker, K.; Ibrahim, A. Modeling of triboelectric vibration energy harvester under rotational magnetic excitation. Smart Mater. Adapt. Struct. Intell. Syst. 2021, 85499, V001T04A012. [Google Scholar]
- Zhang, L.; Zhang, B.; Chen, J.; Jin, L.; Deng, W.; Tang, J.; Zhang, H.; Pan, H.; Zhu, M.; Yang, W.; et al. Lawn structured triboelectric nanogenerators for scavenging sweeping wind energy on rooftops. Adv. Mater. 2016, 28, 1650–1656. [Google Scholar] [CrossRef]
- Chen, X.; Gao, L.; Chen, J.; Lu, S.; Zhou, H.; Wang, T.; Wang, A.; Zhang, Z.; Guo, S.; Mu, X.; et al. A chaotic pendulum triboelectric-electromagnetic hybridized nanogenerator for wave energy scavenging and self-powered wireless sensing system. Nano Energy 2020, 69, 104440. [Google Scholar] [CrossRef]
- Roundy, S.; Wright, P.; Rabaey, J. A study of low level vibrations as a power source for wireless sensor nodes. Comput. Commun. 2003, 26, 1131–1144. [Google Scholar] [CrossRef]
- Miller, L.; Halvorsen, E.; Dong, T.; Wright, P. Modeling and experimental verification of low-frequency MEMS energy harvesting from ambient vibrations. J. Micromech. Microeng. 2011, 21, 045029. [Google Scholar] [CrossRef]
- Vidal, J.; Slabov, V.; Kholkin, A.; Dos Santos, M. Hybrid triboelectric-electromagnetic nanogenerators for mechanical energy harvesting: A review. Nano Micro Lett. 2021, 13, 199. [Google Scholar] [CrossRef]
- Dong, L.; Closson, A.; Jin, C.; Trase, I.; Chen, Z.; Zhang, J. Vibration-Energy-Harvesting System: Transduction Mechanisms, Frequency Tuning Techniques, and Biomechanical Applications. Adv. Mater. Technol. 2019, 4, 1900177. [Google Scholar] [CrossRef] [PubMed]
- Hassena, M.; Samaali, H.; Ouakad, H.; Najar, F. Arched Beam Based Energy Harvester Using Electrostatic Transduction for General in-plane Excitations. In Proceedings of the 2021 18th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 22–25 March 2021; pp. 210–215. [Google Scholar]
- Atmeh, M.; Ibrahim, A. Modeling of Piezoelectric Vibration Energy Harvesting From Low-Frequency Using Frequency Up-Conversion. Smart Mater. Adapt. Struct. Intell. Syst. 2021, 85499, V001T04A011. [Google Scholar]
- Miao, G.; Fang, S.; Wang, S.; Zhou, S. A low-frequency rotational electromagnetic energy harvester using a magnetic plucking mechanism. Appl. Energy 2022, 305, 117838. [Google Scholar] [CrossRef]
- Foong, F.; Thein, C.; Yurchenko, D. Structural optimisation through material selections for multi-cantilevered vibration electromagnetic energy harvesters. Mech. Syst. Signal Process. 2002, 162, 08044. [Google Scholar] [CrossRef]
- Ibrahim, A.; Ramini, A.; Towfighian, S. Experimental and theoretical investigation of an impact vibration harvester with triboelectric transduction. J. Sound Vib. 2018, 416, 111–124. [Google Scholar] [CrossRef]
- Zargari, S.; Koozehkanani, Z.; Veladi, H.; Sobhi, J.; Rezania, A. A new Mylar-based triboelectric energy harvester with an innovative design for mechanical energy harvesting applications. Energy Convers. Manag. 2021, 244, 114489. [Google Scholar] [CrossRef]
- Ibrahim, A.; Hassan, M. Extended bandwidth of 2DOF double impact triboelectric energy harvesting: Theoretical and experimental verification. Appl. Energy. 2023, 333, 120593. [Google Scholar] [CrossRef]
- Fan, F.; Tian, Z.; Wang, Z. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Bertacchini, A.; Larcher, L.; Lasagni, M.; Pavan, P. Ultra Low Cost Triboelectric Energy Harvesting Solutions for Embedded Sensor Systems. In Proceedings of the 2015 IEEE 15th International Conference on Nanotechnology (IEEE-NANO), Rome, Italy, 27–30 July 2015; pp. 1151–1154. [Google Scholar]
- He, W.; Fu, X.; Zhang, D.; Zhang, Q.; Zhuo, K.; Yuan, Z.; Ma, R. Recent progress of flexible/wearable self-charging power units based on triboelectric nanogenerators. Nano Energy 2021, 84, 105880. [Google Scholar] [CrossRef]
- Rahman, M.; Rana, S.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Park, J. Biomechanical energy-driven hybridized generator as a universal portable power source for smart/wearable electronics. Adv. Energy Mater. 2020, 10, 1903663. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, L.; Bao, B.; Ouyang, W.; Chen, W.; Li, Q.; Li, D. Customizing Triboelectric Nanogenerator on Everyday Clothes by Screen-Printing Technology for Biomechanical Energy Harvesting and Human-Interactive Applications. Adv. Mater. Technol. 2023, 8, 2201138. [Google Scholar] [CrossRef]
- Zhao, H.; Ouyang, H. Theoretical investigation and experiment of a disc-shaped triboelectric energy harvester with a magnetic bistable mechanism. Smart Mater. Struct. 2021, 30, 095026. [Google Scholar] [CrossRef]
- Rana, S.; Rahman, M.; Salauddin, M.; Sharma, S.; Maharjan, P.; Bhatta, T.; Cho, H.; Park, C.; Park, J. Electrospun PVDF-TrFE/MXene nanofiber mat-based triboelectric nanogenerator for smart home appliances. ACS Appl. Mater. Interfaces 2021, 13, 4955–4967. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Sengupta, D.; Pei, Y.; Kottapalli, A. Wearable Nanofiber-Based Triboelectric Nanogenerator for Body Motion Energy Harvesting. In Proceedings of the 2021 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Manchester, UK, 20–23 June 2021; pp. 1–4. [Google Scholar]
- Zu, G.; Wei, Y.; Sun, C.; Yang, X. Humidity-resistant, durable, wearable single-electrode triboelectric nanogenerator for mechanical energy harvesting. J. Mater. Sci. 2022, 57, 2813–2824. [Google Scholar] [CrossRef]
- Han, X.; Jiang, D.; Qu, X.; Bai, Y.; Cao, Y.; Luo, R.; Li, Z. A stretchable, self-healable triboelectric nanogenerator as electronic skin for energy harvesting and tactile sensing. Materials 2021, 14, 1689. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Hou, X.; He, J.; Cui, M.; Wang, C.; Geng, W.; Mu, J.; Han, B.; Chou, X. Ultra-flexible and high-sensitive triboelectric nanogenerator as electronic skin for self-powered human physiological signal monitoring. Nano Energy 2020, 69, 104437. [Google Scholar] [CrossRef]
- Hossain, N.; Yamomo, G.; Willing, R.; Towfighian, S. Characterization of a packaged triboelectric harvester under simulated gait loading for total knee replacement. IEEE/ASME Trans. Mechatron. 2021, 26, 2967–2976. [Google Scholar] [CrossRef]
- Atmeh, M.; Athey, C.; Ramini, A.; Barakat, N.; Ibrahim, A. Performance analysis of triboelectric energy harvester designs for knee implants. Health Monit. Struct. Biol. Syst. XV 2021, 11593, 221–231. [Google Scholar]
- Davis, J.; Atmeh, M.; Barakat, N.; Ibrahim, A. Design and performance simulation of a triboelectric energy harvester for total hip replacement implants. Health Monit. Struct. Biol. Syst. XV 2021, 11593, 232–244. [Google Scholar]
- Real, F.; Batou, A.; Ritto, T.; Desceliers, C. Stochastic modeling for hysteretic bit–rock interaction of a drill string under torsional vibrations. J. Vib. Control. 2019, 25, 1663–1672. [Google Scholar] [CrossRef]
- Chen, M.; Wang, Z.; Zheng, Y.; Zhang, Q.; He, B.; Yang, J.; Qi, M.; Wei, L. Flexible tactile sensor based on patterned Ag-nanofiber electrodes through electrospinning. Sensors 2021, 21, 2413. [Google Scholar] [CrossRef] [PubMed]
- Min, G.; Dahiya, A.; Mulvihill, D.; Dahiya, R. A Wide Range Self-Powered Flexible Pressure Sensor Based on Triboelectric Nanogenerator. In Proceedings of the 2021 IEEE International Conference on Flexible and Printable Sensors and Systems (FLEPS), Machester, UK, 20–23 June 2021; pp. 1–4. [Google Scholar]
- Du, T.; Zuo, X.; Dong, F.; Li, S.; Mtui, A.; Zou, Y.; Zhang, P.; Zhao, J.; Zhang, Y.; Sun, P.; et al. A self-powered and highly accurate vibration sensor based on bouncing-ball triboelectric nanogenerator for intelligent ship machinery monitoring. Micromachines 2021, 12, 218. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Lin, L.; Xie, Y.; Jing, Q.; Niu, S.; Wang, Z. Sliding-triboelectric nanogenerators based on in-plane charge-separation mechanism. Nano Lett. 2013, 13, 2226–2233. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Wang, S.; Lin, L.; Zhou, Y.; Hu, Y.; Wang, Z. Theory of sliding-mode triboelectric nanogenerators. Adv. Mater. 2013, 25, 6184–6193. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Zhang, H.; Chen, J.; Jing, Q.; Zhou, Y.; Wen, X.; Wang, Z. Single-electrode-based sliding triboelectric nanogenerator for self-powered displacement vector sensor system. Acs Nano 2013, 7, 7342–7351. [Google Scholar] [CrossRef]
- Meng, B.; Tang, W.; Too, Z.; Zhang, X.; Han, M.; Liu, W.; Zhang, H. A transparent single-friction-surface triboelectric generator and self-powered touch sensor. Energy Environ. Sci. 2013, 6, 3235–3240. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Chen, X.; Wang, S.; Zhou, Y.; Lin, L.; Xie, Y.; Wang, Z. Theory of freestanding triboelectric-layer-based nanogenerators. Nano Energy 2015, 12, 760–774. [Google Scholar] [CrossRef]
- Jiang, T.; Chen, X.; Han, C.; Tang, W.; Wang, Z. Theoretical study of rotary freestanding triboelectric nanogenerators. Adv. Funct. Mater. 2015, 25, 2928–2938. [Google Scholar] [CrossRef]
- Yang, B.; Zeng, W.; Peng, Z.; Liu, S.; Chen, K.; Tao, X. A fully verified theoretical analysis of contact-mode triboelectric nanogenerators as a wearable power source. Adv. Energy Mater. 2016, 6, 1600505. [Google Scholar] [CrossRef]
- Zhao, C.; Yang, Y.; Upadrashta, D.; Zhao, L. Design, modeling and experimental validation of a low-frequency cantilever triboelectric energy harvester. Energy 2021, 214, 118885. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D. Broadband piezoelectric power generation on high-energy orbits of the bistable Duffing oscillator with electromechanical coupling. J. Sound Vib. 2011, 330, 2339–2353. [Google Scholar] [CrossRef]
- Sari, I.; Balkan, T.; Kulah, H. A Wideband Electromagnetic Micro Power Generator for Wireless Microsystems. In Proceedings of the TRANSDUCERS 2007—2007 International Solid-State Sensors, Actuators and Microsystems Conference, Lyon, France, 10–14 June 2017; pp. 275–278. [Google Scholar]
- Zou, H.; Zhao, L.; Gao, Q.; Zuo, L.; Liu, F.; Tan, T.; Wei, K.; Zhang, W. Mechanical modulations for enhancing energy harvesting: Principles, methods and applications. Appl. Energy 2019, 255, 113871. [Google Scholar] [CrossRef]
- Brennan, M.; Gatti, G. Harvesting energy from time-limited harmonic vibrations: Mechanical considerations. J. Vib. Acoust. 2017, 139, 051019. [Google Scholar] [CrossRef]
- Yang, G.; Stark, B.; Hollis, S.; Burrow, S. Challenges for energy harvesting systems under intermittent excitation. IEEE J. Emerg. Sel. Top. Circuits Syst. 2014, 4, 364–374. [Google Scholar] [CrossRef]
- Li, X.; Hu, G.; Guo, Z.; Wang, J.; Yang, Y.; Liang, J. Frequency up-conversion for vibration energy harvesting: A review. Symmetry 2022, 14, 631. [Google Scholar] [CrossRef]
- Fakeih, E. Harvesting Mechanical Vibrations Using a Frequency Up-Converter. Ph.D. Thesis, King Abdullah University of Science and Technology, Thuwal, Saudi Arabia, 2020. [Google Scholar]
- Fakeih, E.; Almansouri, A.; Kosel, J.; Younis, M.; Salama, K. A Wideband Magnetic Frequency Up-Converter Energy Harvester. Adv. Eng. Mater. 2021, 2001364. [Google Scholar] [CrossRef]
- Gu, L.; Livermore, C. Impact-driven, frequency up-converting coupled vibration energy harvesting device for low frequency operation. Smart Mater. Struct. 2011, 20, 045004. [Google Scholar] [CrossRef]
- Pozzi, M.; Zhu, M. Plucked piezoelectric bimorphs for energy harvesting. Adv. Energy Harvest. Methods 2013, 2013, 119–140. [Google Scholar]
- Jung, S.; Yun, K. Energy-harvesting device with mechanical frequency-up conversion mechanism for increased power efficiency and wideband operation. Appl. Phys. Lett. 2010, 96, 111906. [Google Scholar] [CrossRef]
- Cottone, F.; Gammaitoni, L.; Vocca, H.; Ferrari, M.; Ferrari, V. Piezoelectric buckled beams for random vibration energy harvesting. Smart Mater. Struct. 2012, 21, 035021. [Google Scholar] [CrossRef]
- Yin, Z.; Gao, S.; Jin, L.; Guo, S.; Wu, Q.; Li, Z. A shoe-mounted frequency up-converted piezoelectric energy harvester. Sens. Actuators Phys. 2021, 318, 112530. [Google Scholar] [CrossRef]
- Atmeh, M.; Ibrahim, A.; Ramini, A. Static and Dynamic Analysis of a Bistable Frequency Up-Converter Piezoelectric Energy Harvester. Micromachines 2023, 14, 261. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z. Triboelectric nanogenerators as new energy technology for self-powered systems and as active mechanical and chemical sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef] [PubMed]
- Younis, M. MEMS Linear and Nonlinear Statics and Dynamics; Springer Science & Business Media: Berlin, Germany, 2011. [Google Scholar]
- Henniker, J. Triboelectricity in polymers. Nature 1962, 196, 474. [Google Scholar]
- Dhakar, L.; Tay, F.; Lee, C. Development of a broadband triboelectric energy harvester with SU-8 micropillars. J. Microelectromechanical Syst. 2014, 24, 91–99. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| LFB (length × width × thickness) | () mm | |
| LFB Young’s modulus | Gpa | |
| LFB Density | 1220 kg/m | |
| LFB Damping coefficient | 0.1 N.s/m | |
| HFB (length × width × thickness) | (75 × 10 × 1) mm | |
| HFB Young’s modulus | 69.0 Gpa | |
| HFB Density | 2700 kg/m | |
| HFB Damping coefficient | 0.1 N.s/m | |
| Impact damping coefficient | 3.4 N.s/m | |
| Impact stiffness coefficient | 3.4 N/m | |
| Gap between Upper electrode and PDMS layer | 0.001 m | |
| Dimensions of PDMS layer (length × width × thickness) | (10 × 10 × 0.04) mm | |
| PDMS dielectric constant | ||
| Magnets side length | 8 mm | |
| Magnetic moment | 0.5 A/m | |
| Resistance | R | 10 M |
| Permeability of free space | 8.854 × 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abumarar, H.; Ibrahim, A. A Nonlinear Impact-Driven Triboelectric Vibration Energy Harvester for Frequency Up-Conversion. Micromachines 2023, 14, 1082. https://doi.org/10.3390/mi14051082
Abumarar H, Ibrahim A. A Nonlinear Impact-Driven Triboelectric Vibration Energy Harvester for Frequency Up-Conversion. Micromachines. 2023; 14(5):1082. https://doi.org/10.3390/mi14051082
Chicago/Turabian StyleAbumarar, Hadeel, and Alwathiqbellah Ibrahim. 2023. "A Nonlinear Impact-Driven Triboelectric Vibration Energy Harvester for Frequency Up-Conversion" Micromachines 14, no. 5: 1082. https://doi.org/10.3390/mi14051082