
Magnetic Bistability for a Wider Bandwidth in Vibro-Impact Triboelectric Energy Harvesters

Abstract
:1. Introduction
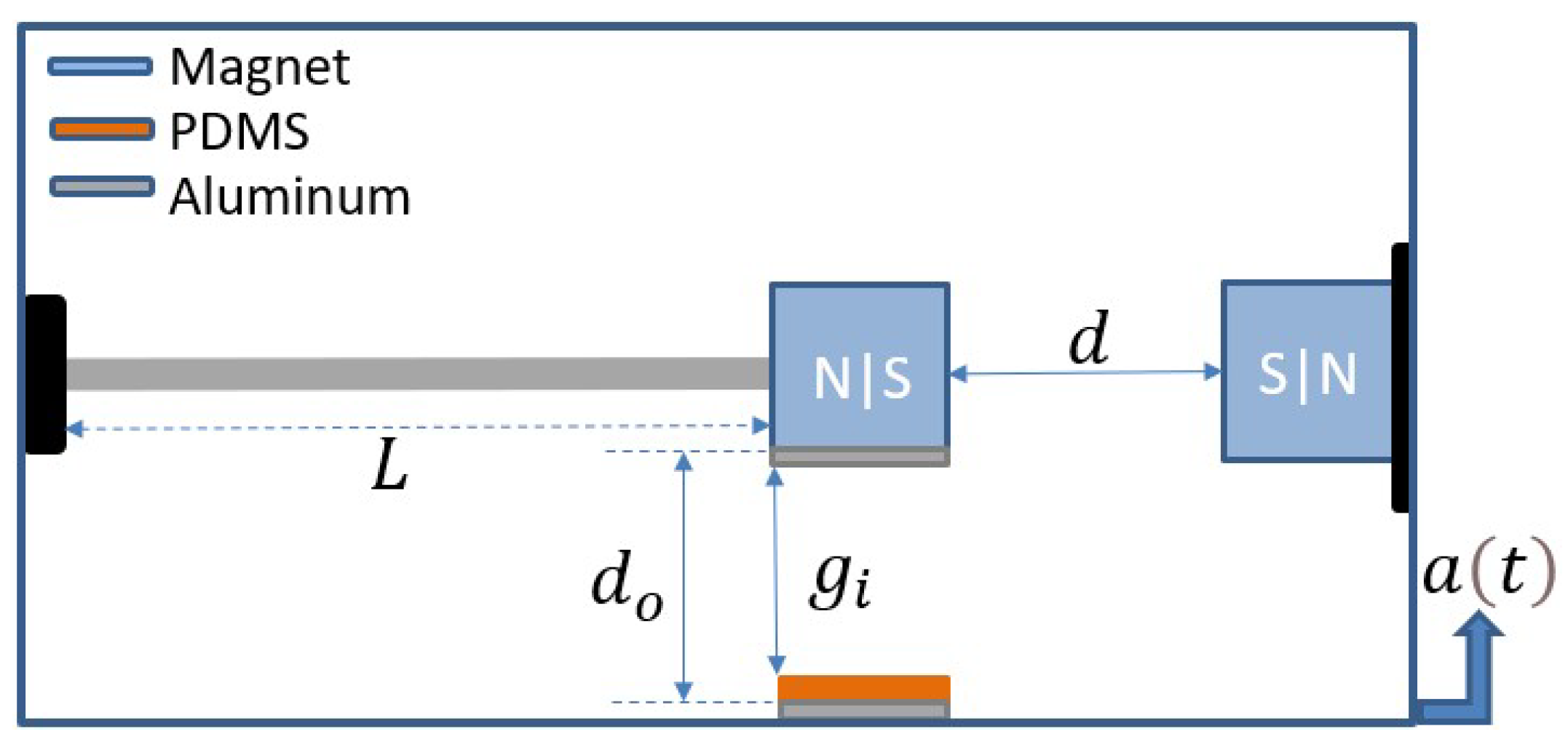
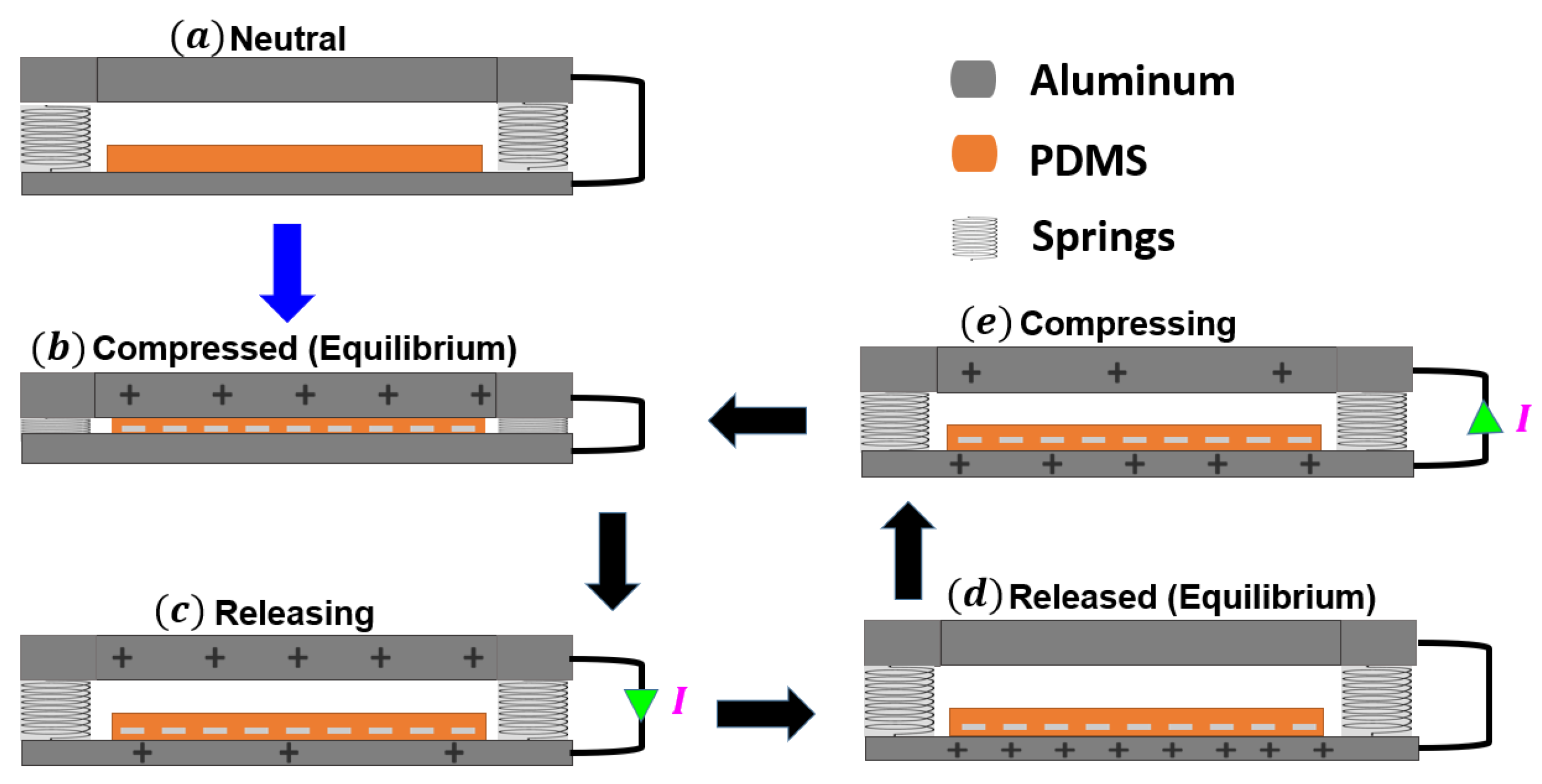
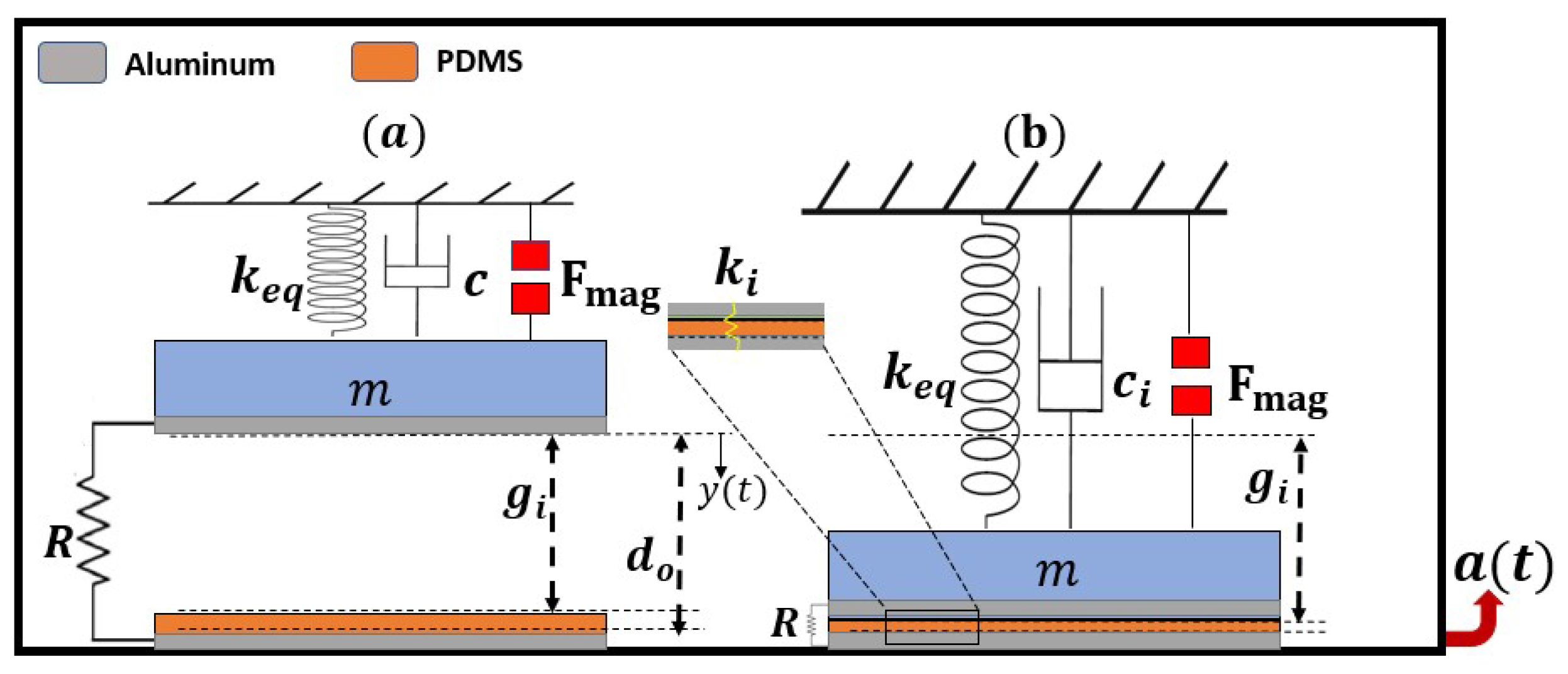
2. Device Configuration and Principle of Operation
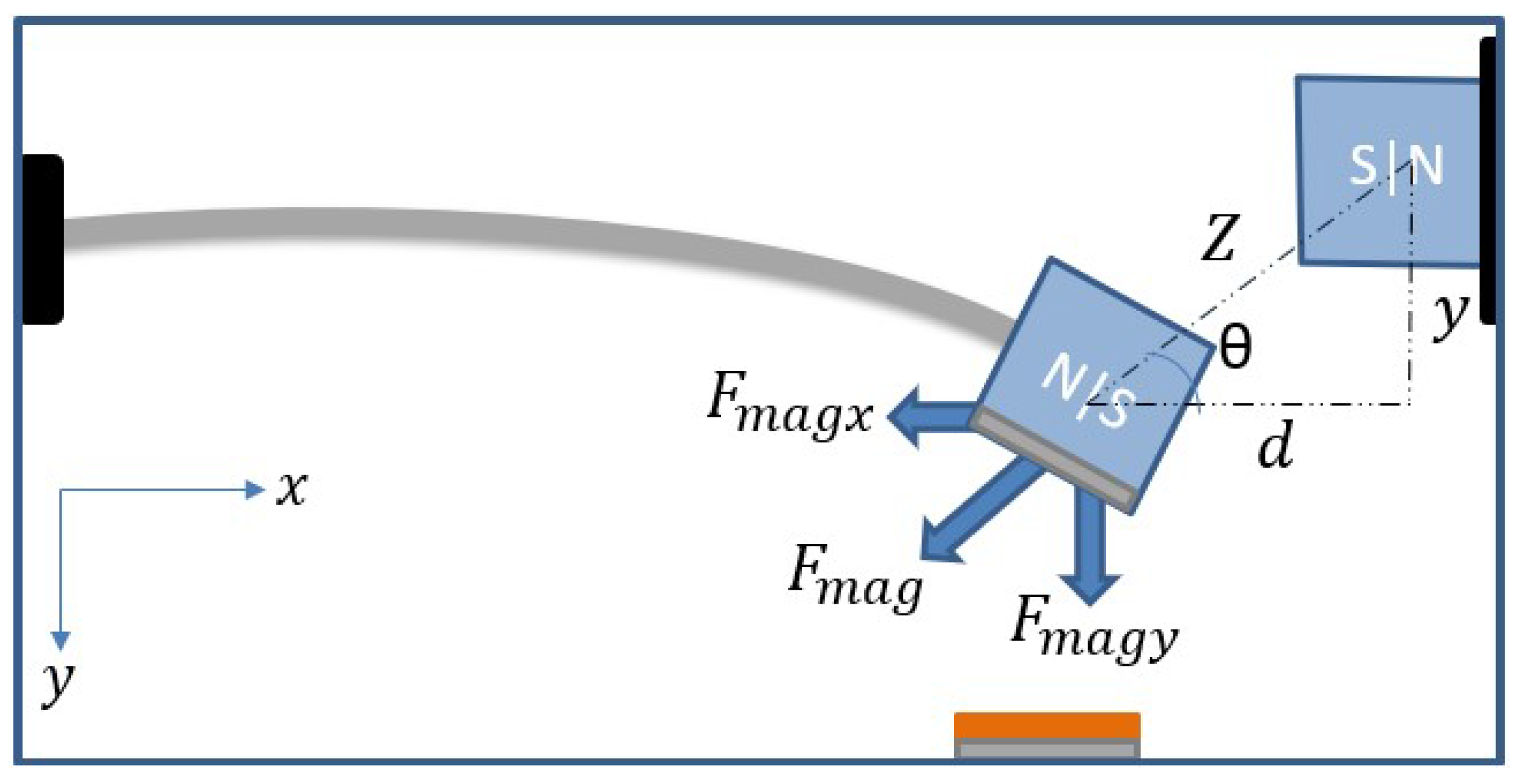
3. Theoretical Model
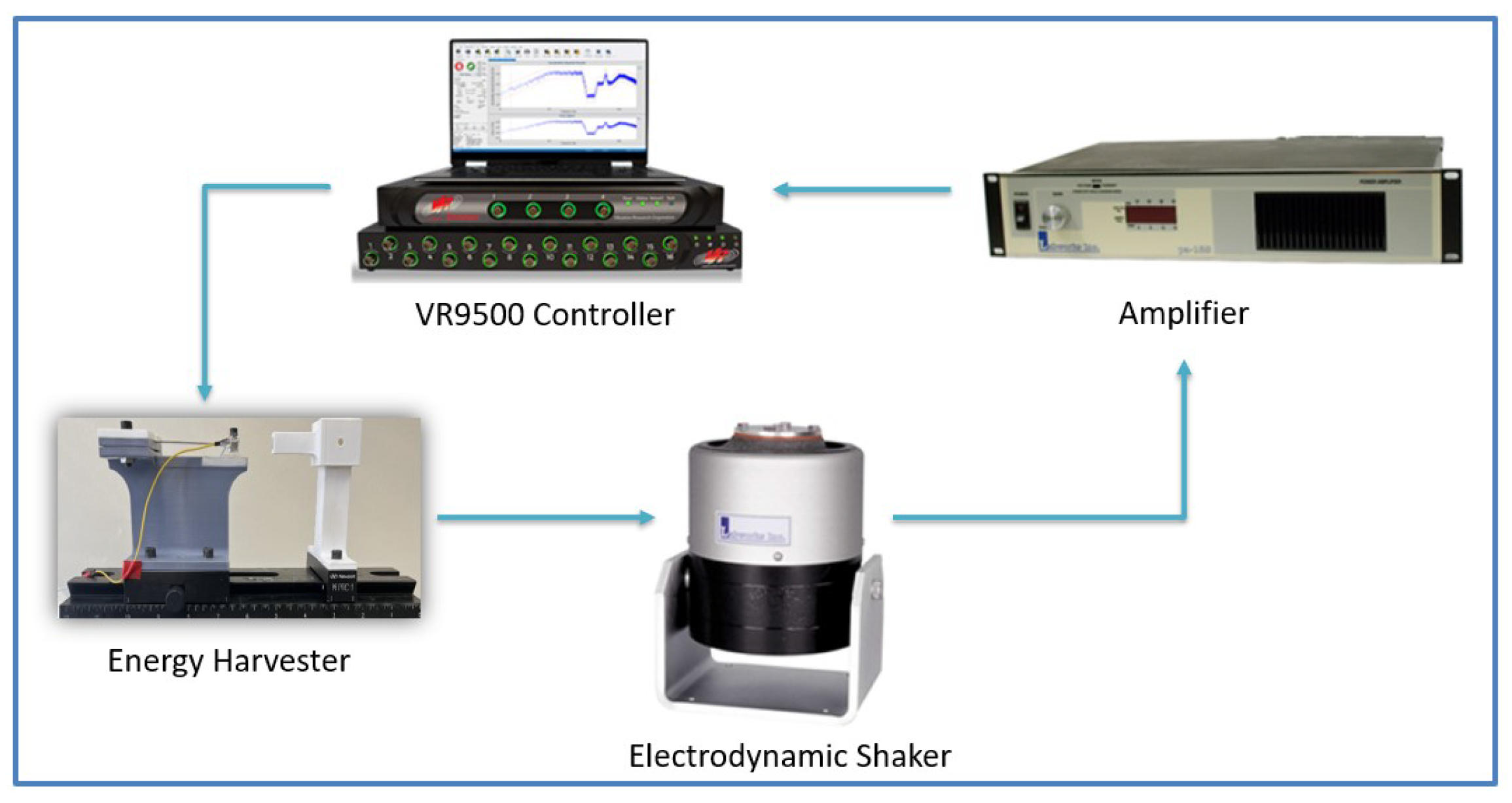
4. Experimental Setup
5. Results and Discussion
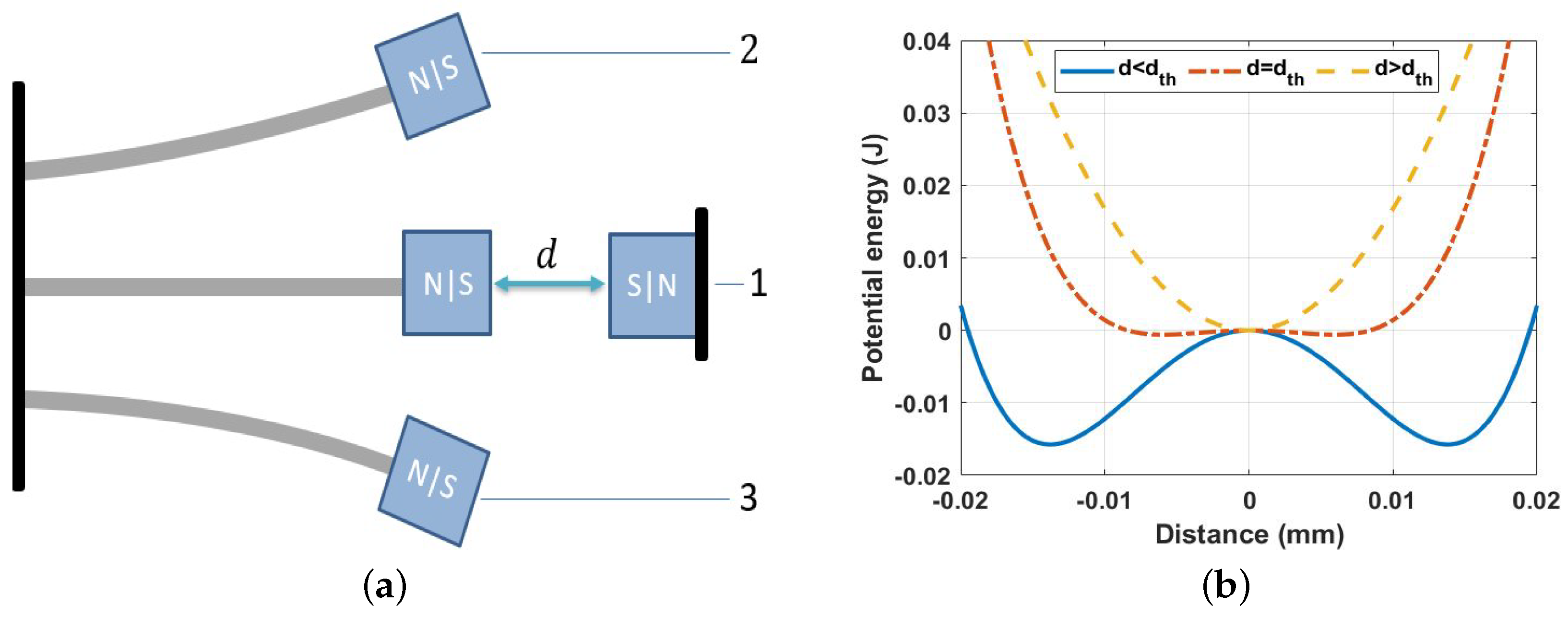
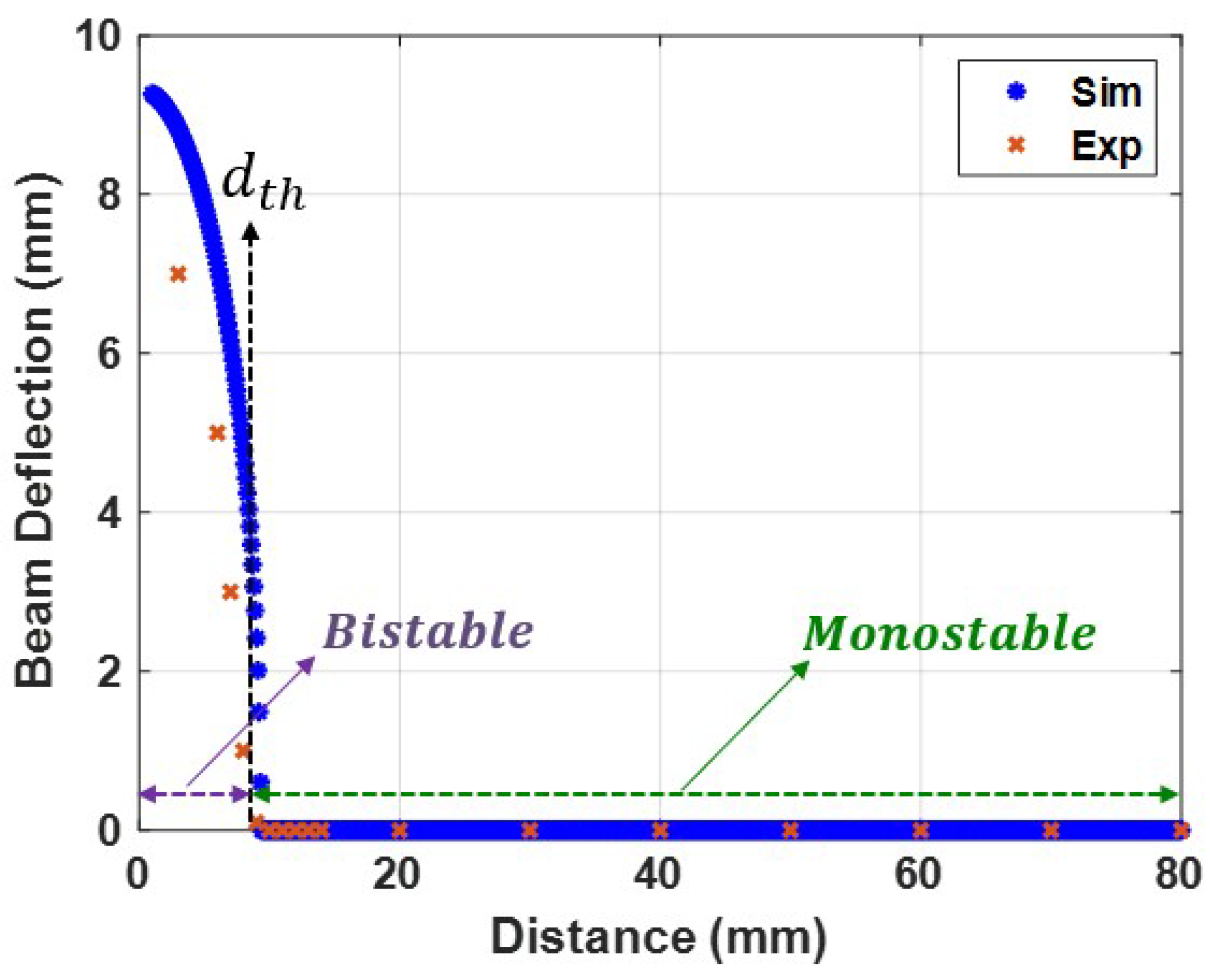
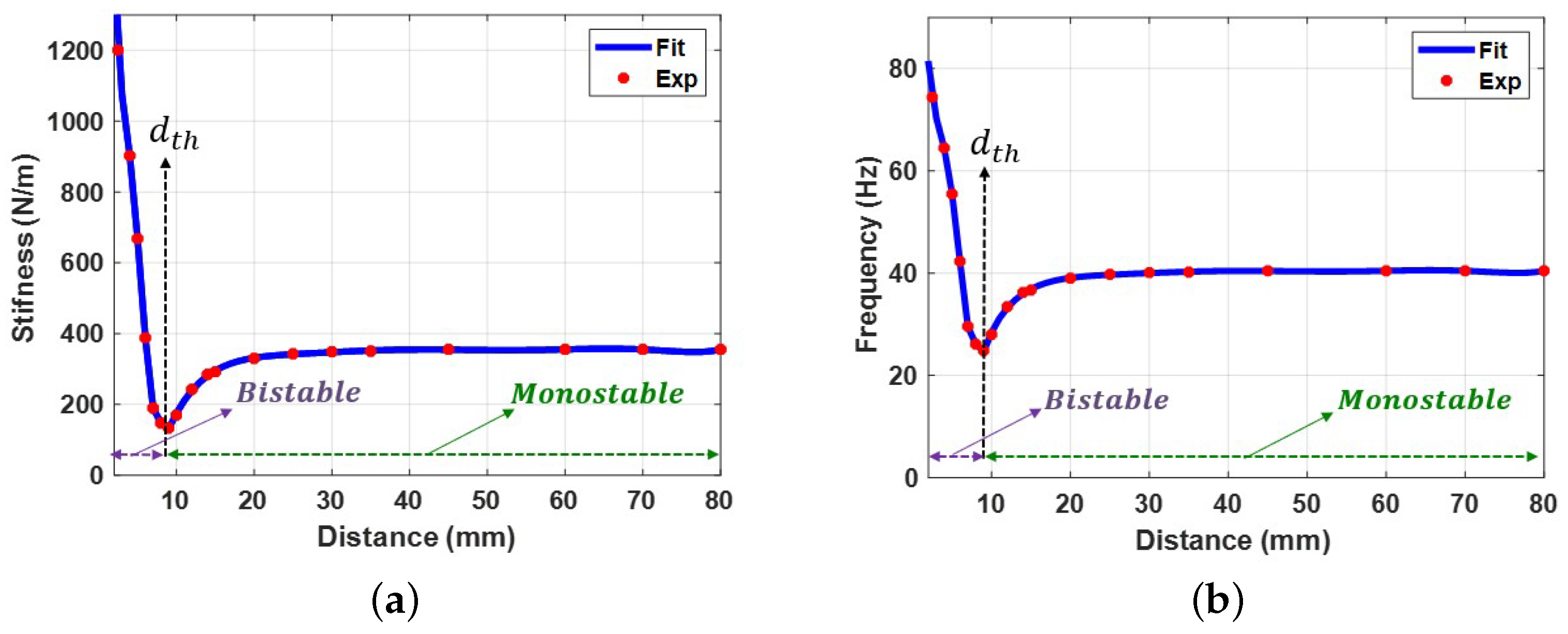
5.1. Static Analysis
5.2. Dynamic Analysis
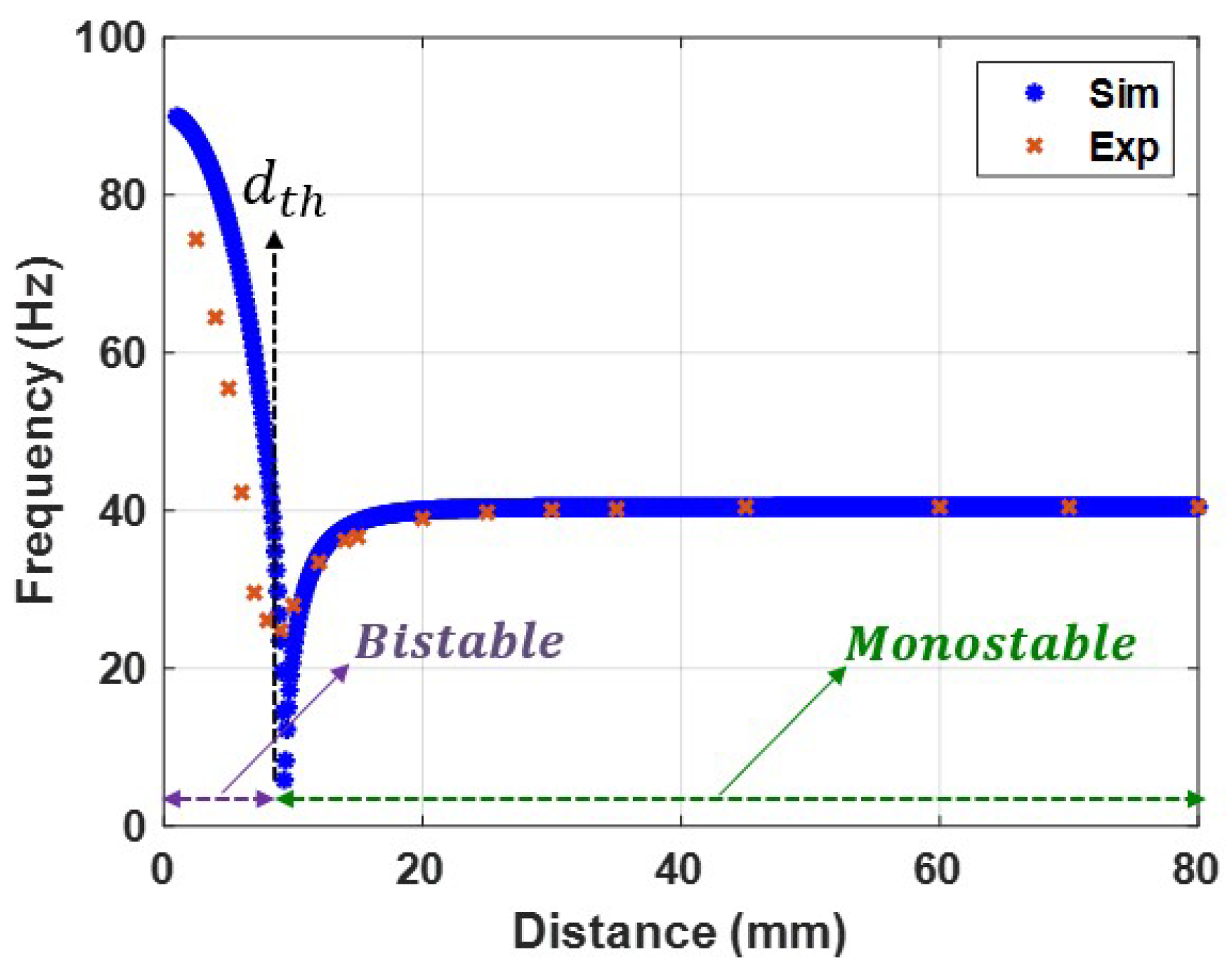
5.2.1. Natural Frequencies
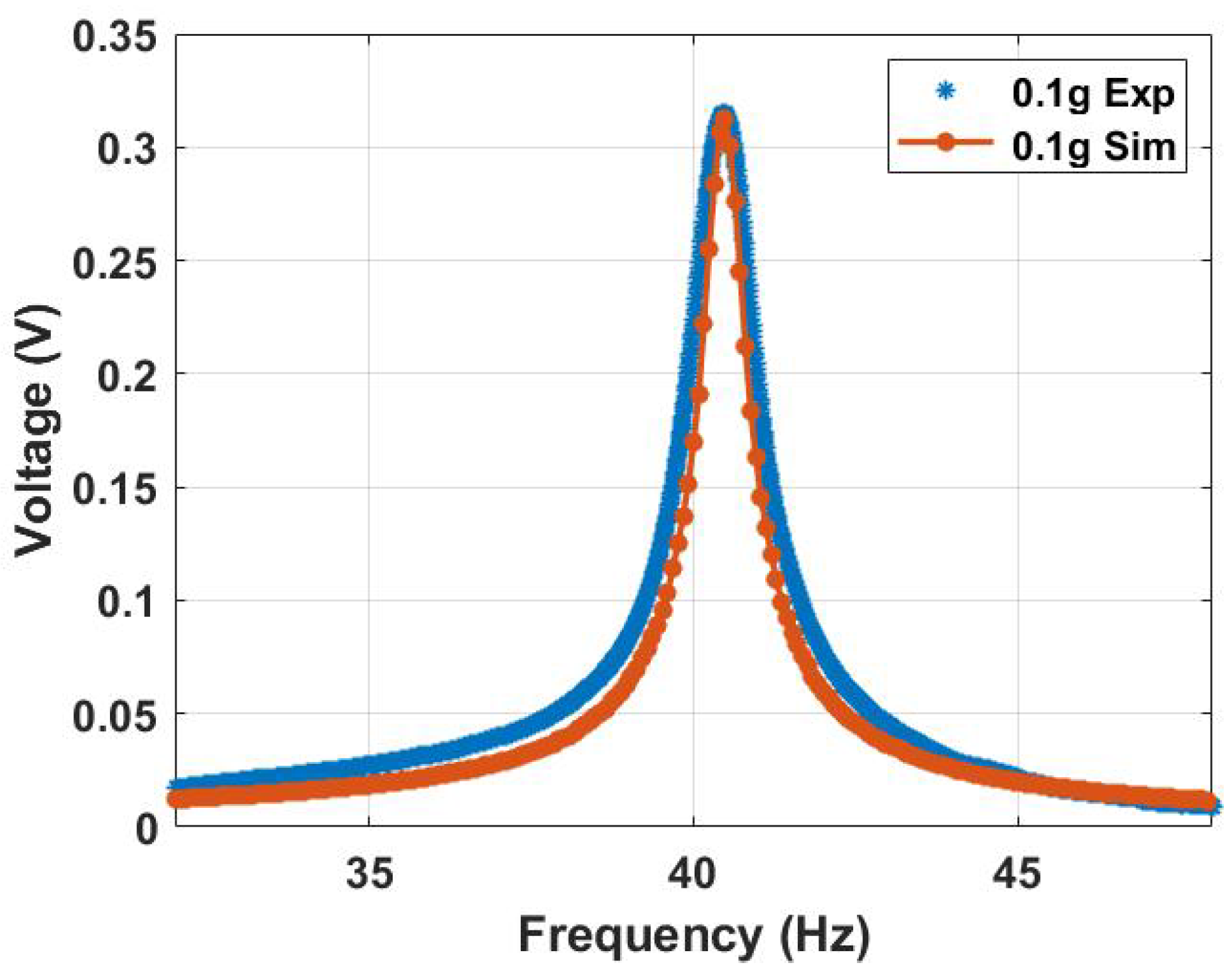
5.2.2. Linear and Conventional Harvester Analysis
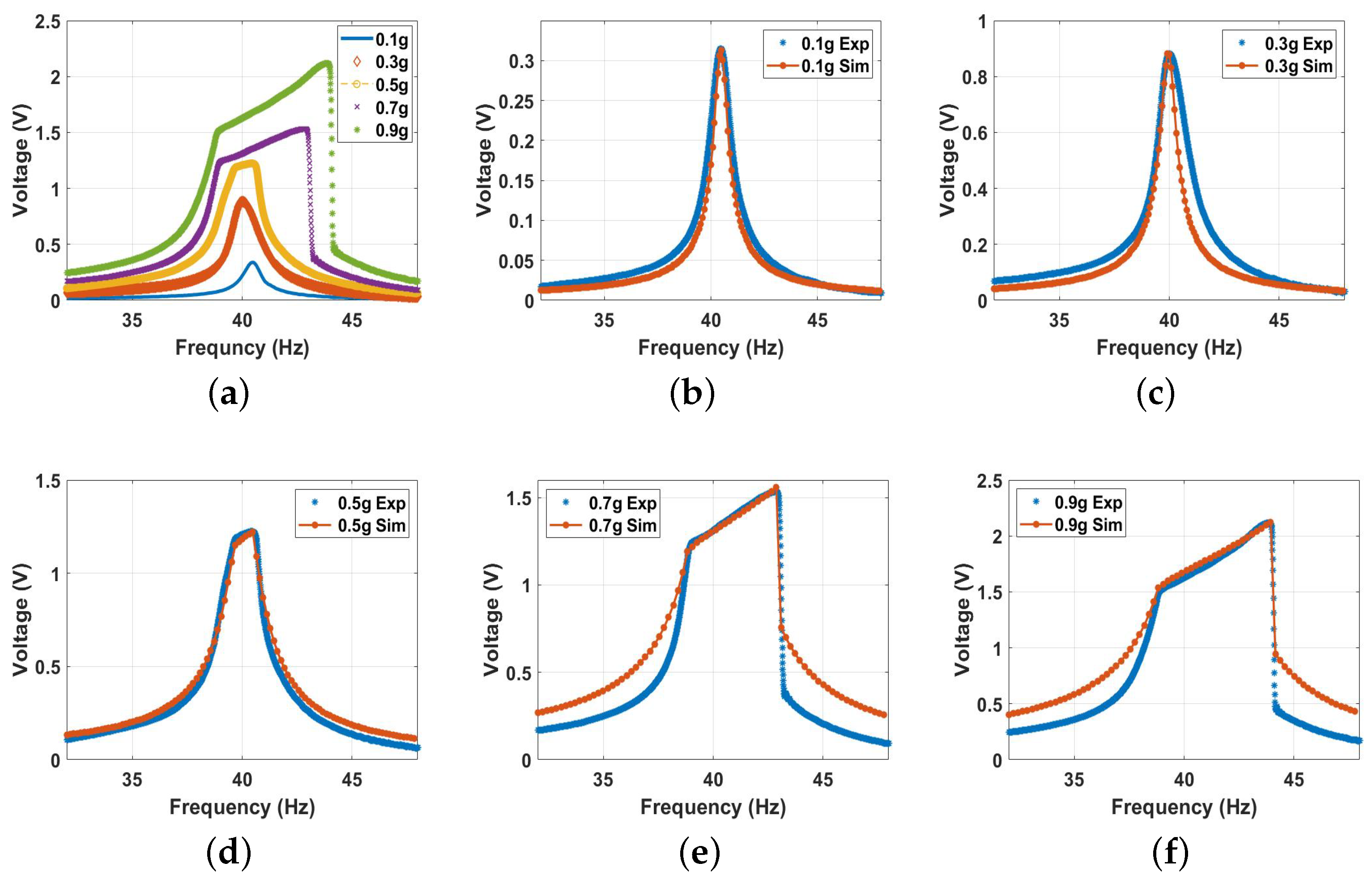
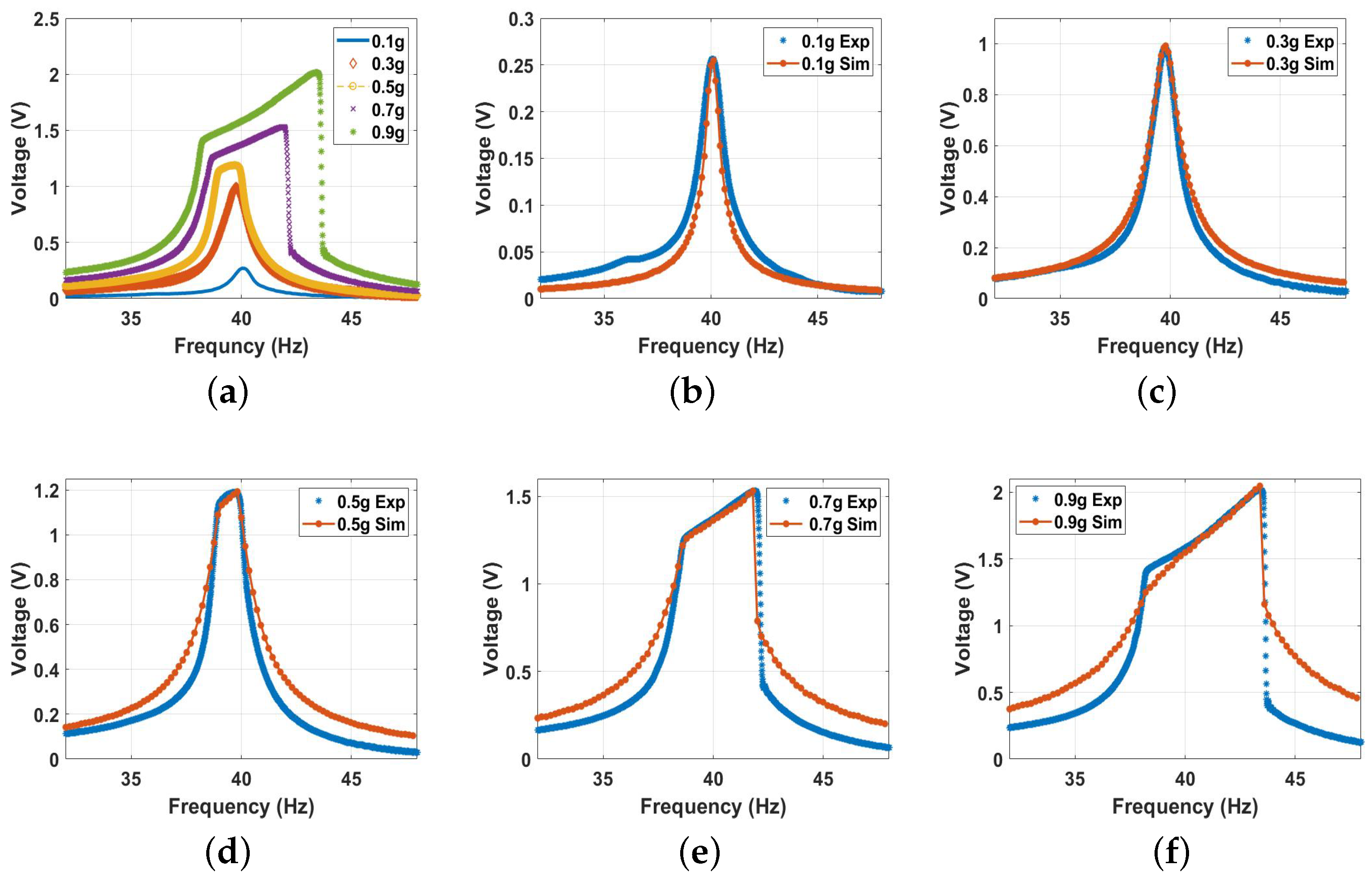
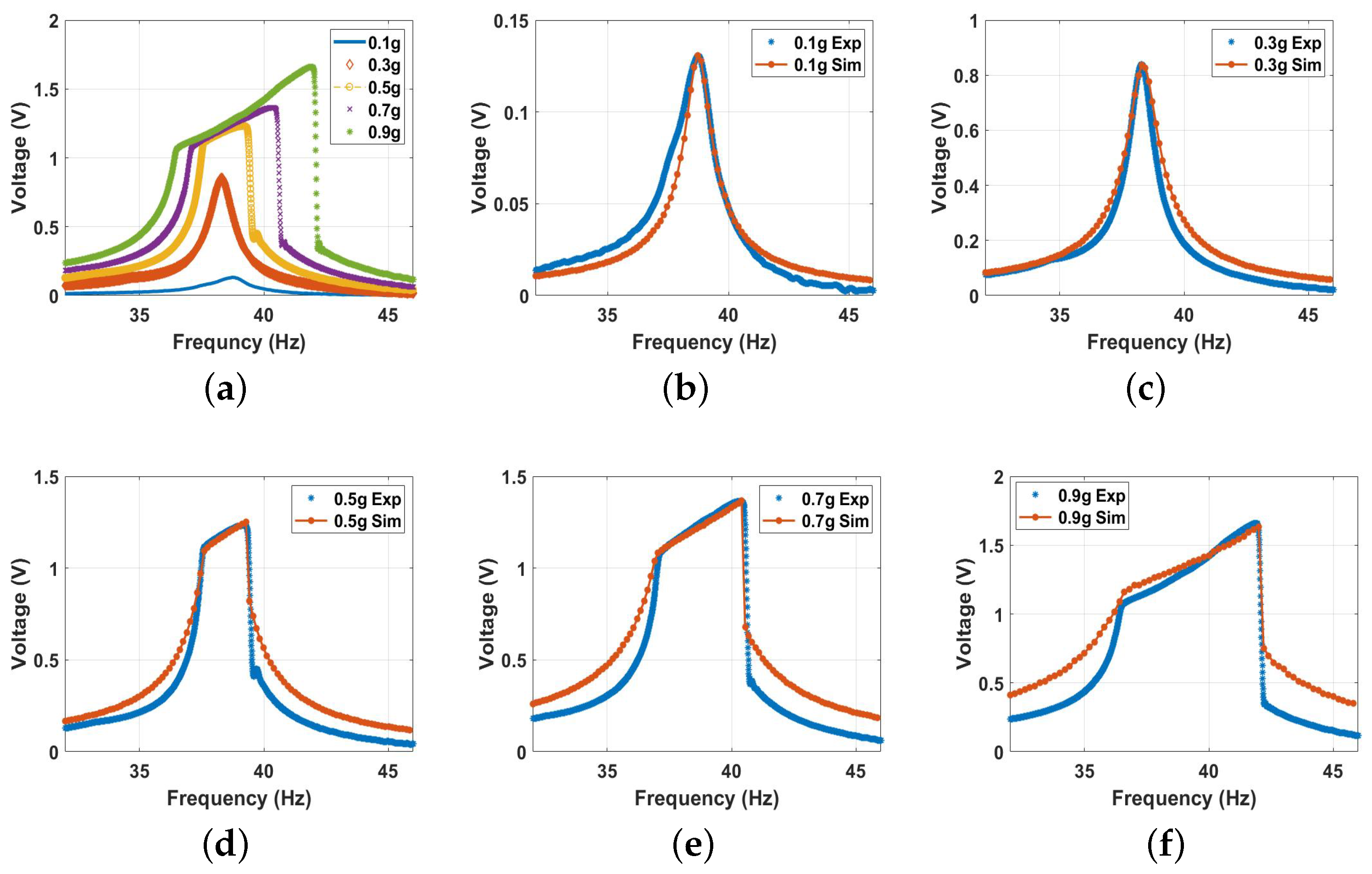
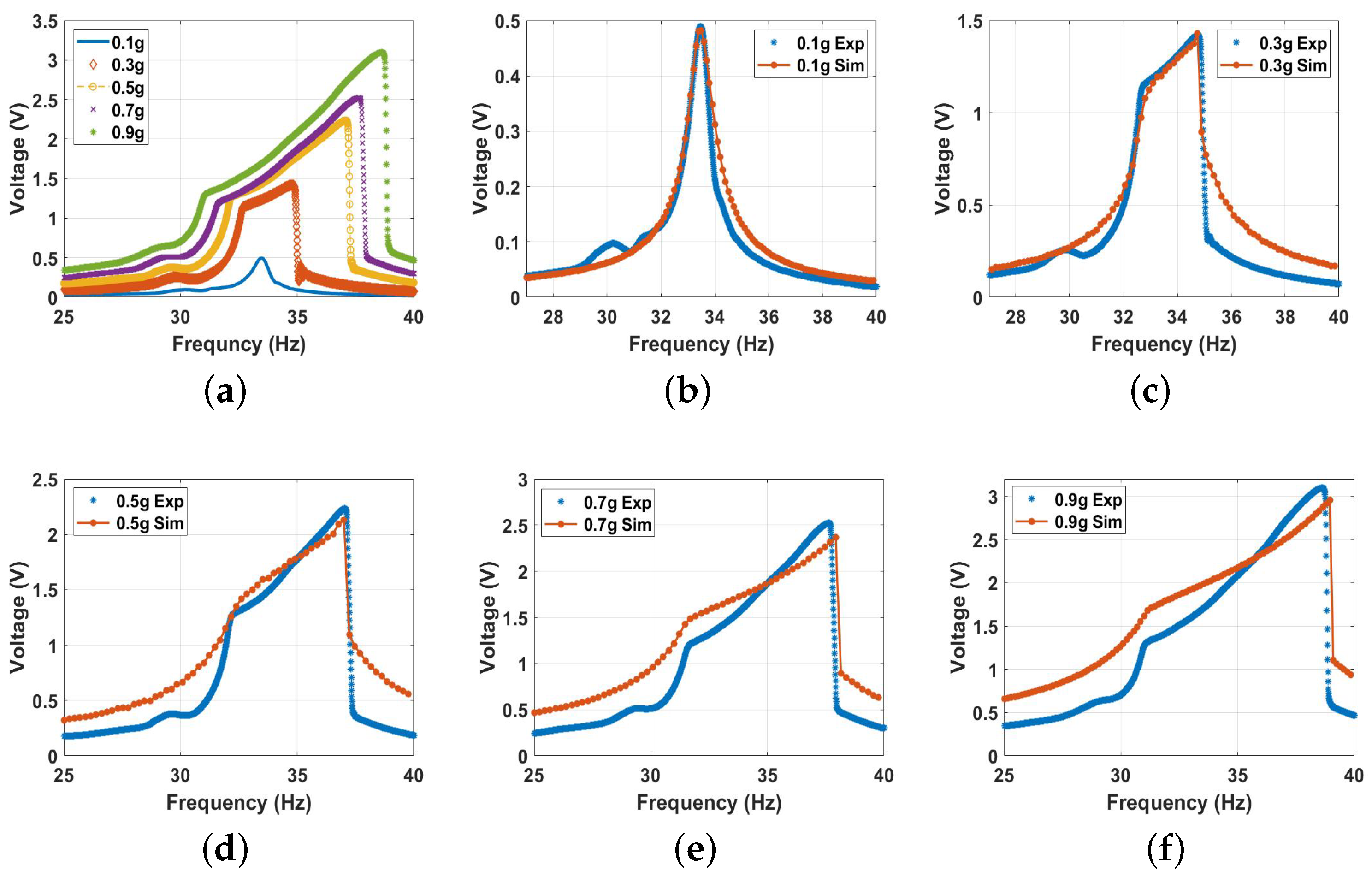
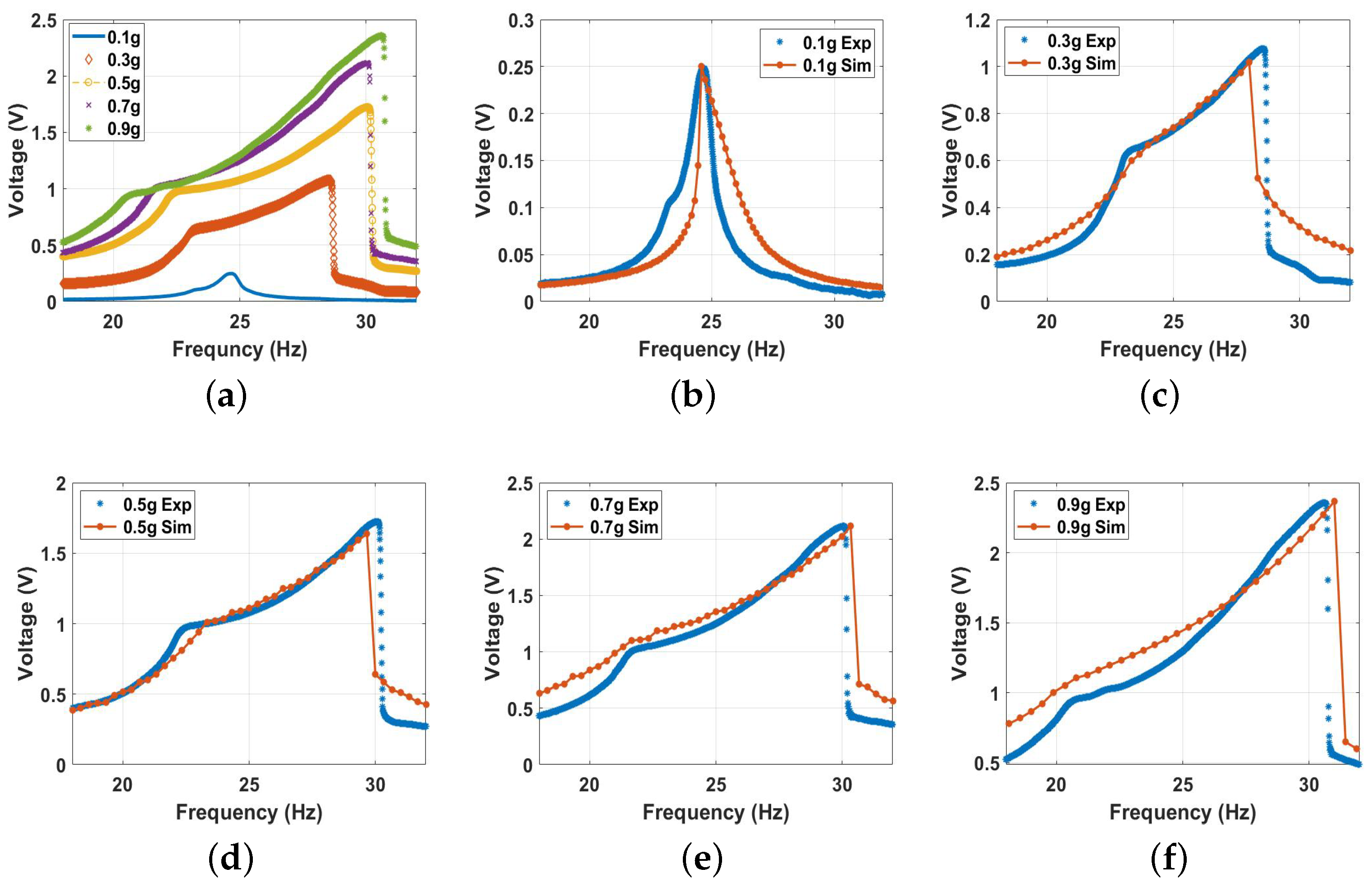
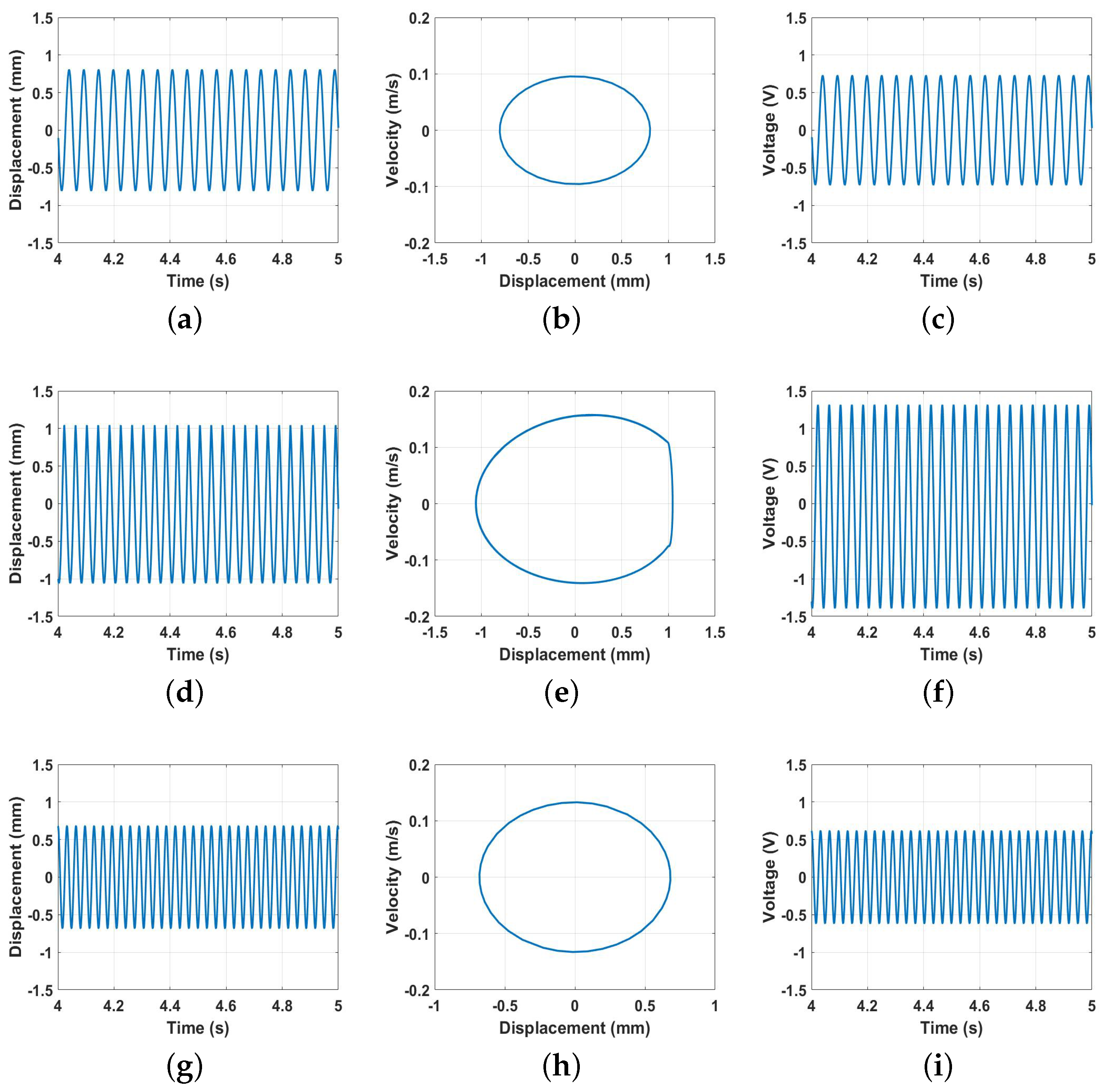
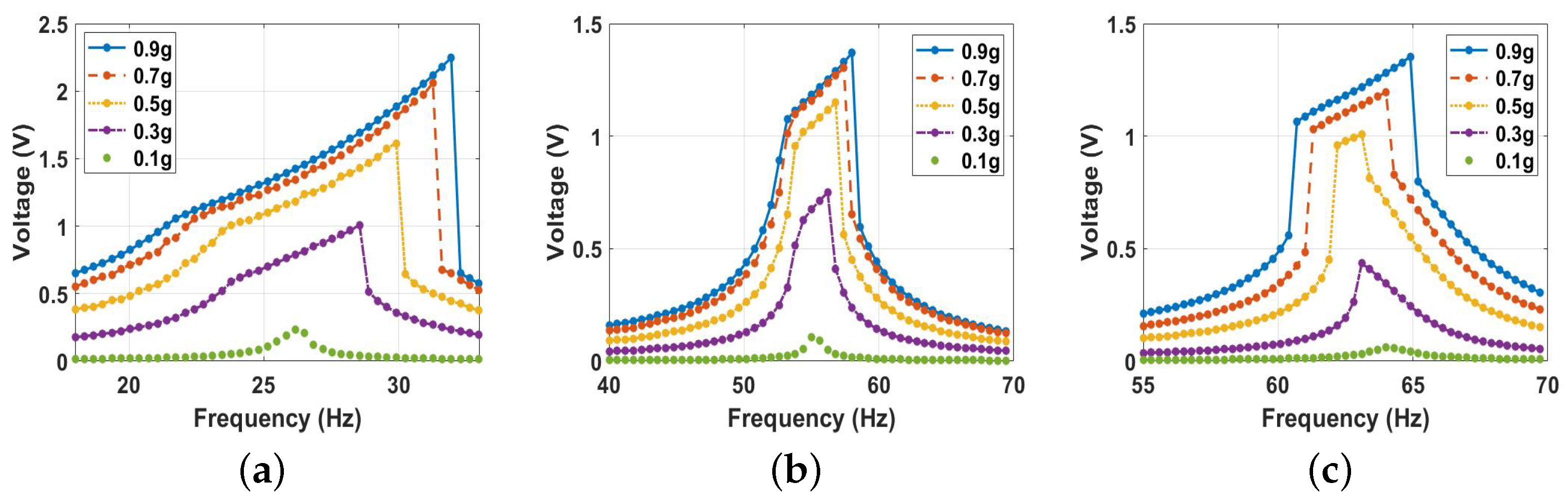
5.2.3. Nonlinear Analysis
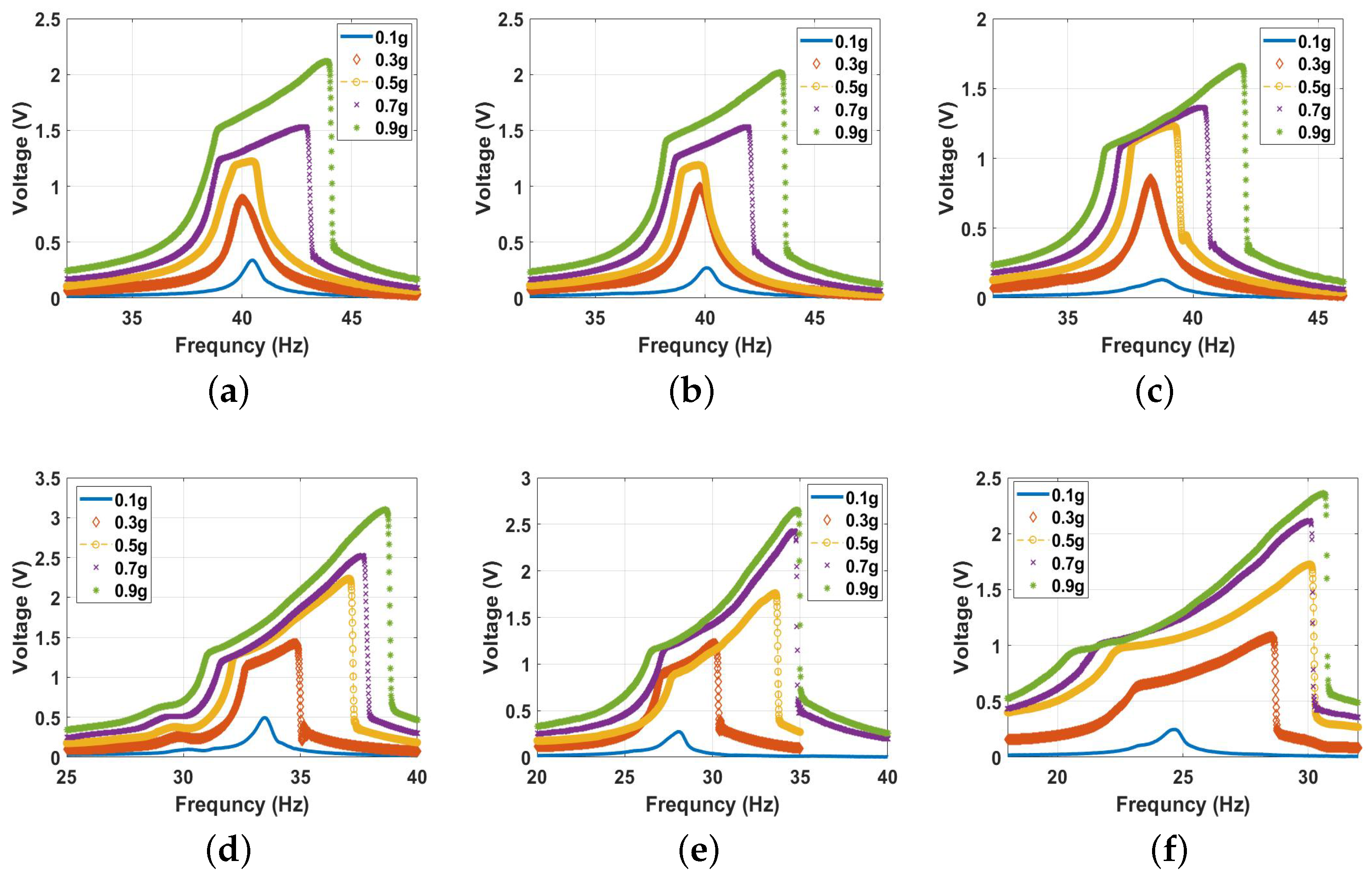
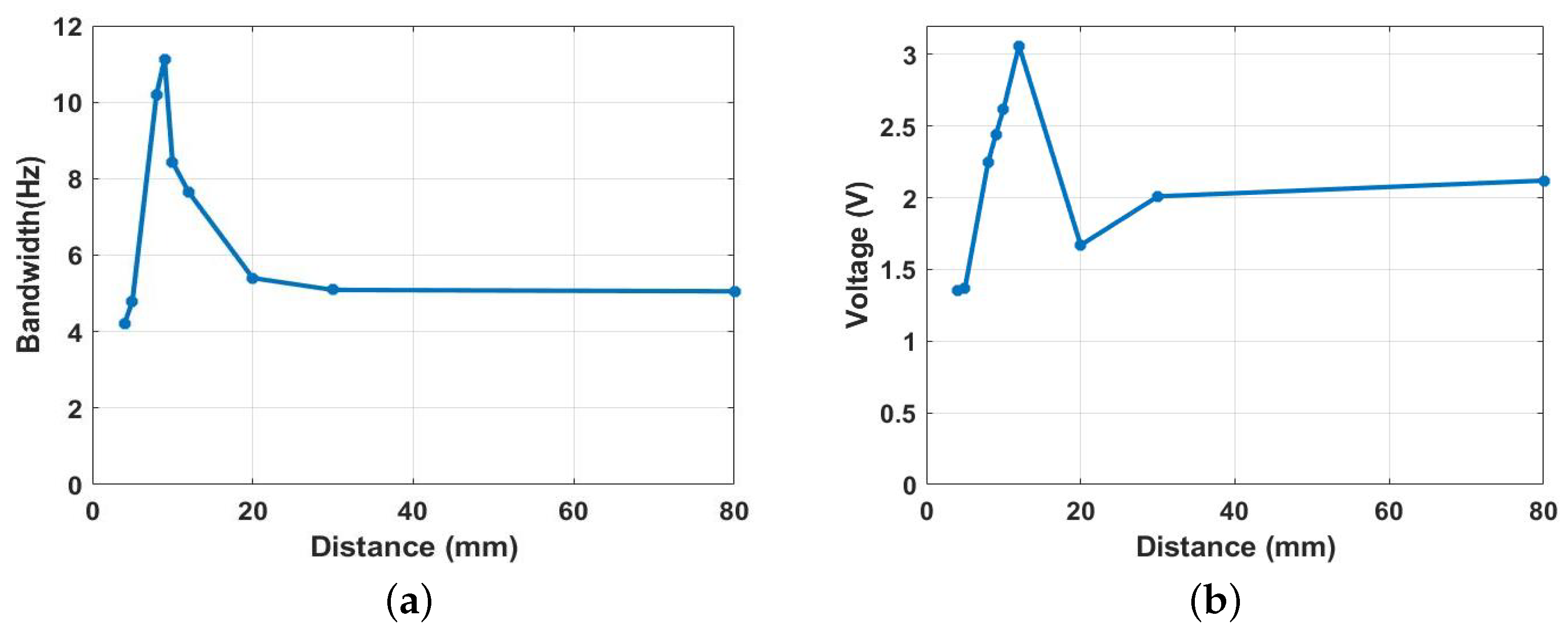
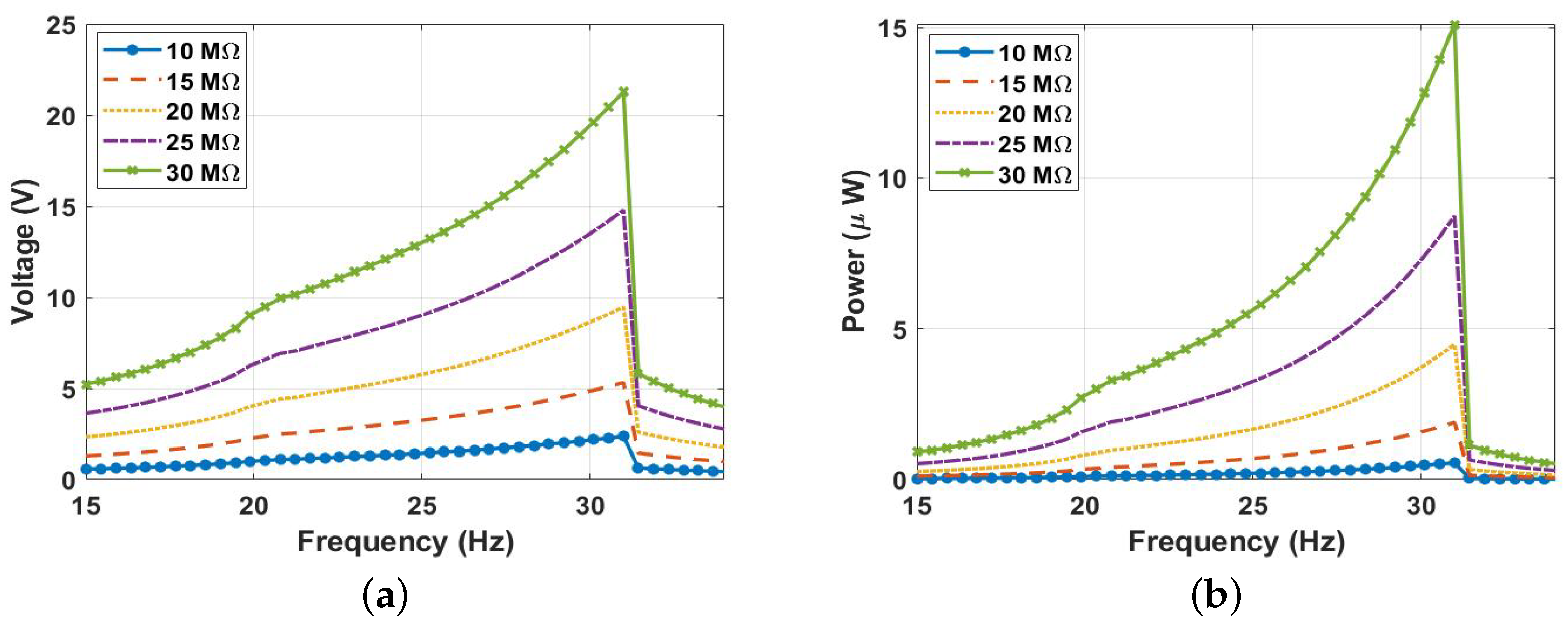
5.2.4. Parametric Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The Coefficients of the Expanded Magnetic Force
References
- Paci, D.; Schipani, M.; Bottarel, V.; Miatton, D. Optimization of a piezoelectric energy harvester for environmental broadband vibrations. In Proceedings of the 2008 15th IEEE International Conference On Electronics, Circuits And Systems, Saint Julian’s, Malta, 31 August–3 September 2008; pp. 177–181. [Google Scholar]
- Vijayan, K. Vibration and Shock Amplification of Drilling Tools. Ph.D. Dissertation, University of Cambridge, Cambridge, UK, 2012. [Google Scholar]
- Du, T.; Zuo, X.; Dong, F.; Li, S.; Mtui, A.; Zou, Y.; Zhang, P.; Zhao, J.; Zhang, Y.; Sun, P.; et al. A self-powered and highly accurate vibration sensor based on bouncing-ball triboelectric nanogenerator for intelligent ship machinery monitoring. Micromachines 2021, 12, 218. [Google Scholar] [CrossRef] [PubMed]
- Fu, Y.; Wang, H.; Zi, Y.; Liang, X. A multifunctional robotic system toward moveable sensing and energy harvesting. Nano Energy 2021, 89, 106368. [Google Scholar] [CrossRef]
- Davis, J.; Atmeh, M.; Barakat, N.; Ibrahim, A. Design and performance simulation of a triboelectric energy harvester for total hip replacement implants. In Proceedings of the Health Monitoring Of Structural And Biological Systems XV, Online, 22–27 March 2021; Volume 11593, pp. 232–244. [Google Scholar]
- Atmeh, M.; Athey, C.; Ramini, A.; Barakat, N.; Ibrahim, A. Performance analysis of triboelectric energy harvester designs for knee implants. In Proceedings of the Health Monitoring Of Structural And Biological Systems XV, Online, 22–27 March 2021; Volume 11593, pp. 221–231. [Google Scholar]
- Hossain, N.; Yamomo, G.; Willing, R.; Towfighian, S. Characterization of a packaged triboelectric harvester under simulated gait loading for total knee replacement. IEEE/ASME Trans. Mechatron. 2021, 26, 2967–2976. [Google Scholar] [CrossRef] [PubMed]
- Cottone, F.; Vocca, H.; Gammaitoni, L. Nonlinear energy harvesting. Phys. Rev. Lett. 2009, 102, 080601. [Google Scholar] [CrossRef]
- Reilly, E.; Miller, L.; Fain, R.; Wright, P. A study of ambient vibrations for piezoelectric energy conversion. Proc. PowerMEMS 2009, 2009, 312–315. [Google Scholar]
- Zhu, D.; Tudor, M.; Beeby, S. Strategies for increasing the operating frequency range of vibration energy harvesters: A review. Meas. Sci. Technol. 2009, 21, 022001. [Google Scholar] [CrossRef]
- Aldraihem, O.; Baz, A. Energy harvester with a dynamic magnifier. J. Intell. Mater. Syst. Struct. 2011, 22, 521–530. [Google Scholar] [CrossRef]
- Yu, N.; Ma, H.; Wu, C.; Yu, G.; Yan, B. Modeling and experimental investigation of a novel bistable two-degree-of-freedom electromagnetic energy harvester. Mech. Syst. Signal Process. 2021, 156, 107608. [Google Scholar] [CrossRef]
- Miao, G.; Fang, S.; Wang, S.; Zhou, S. A low-frequency rotational electromagnetic energy harvester using a magnetic plucking mechanism. Appl. Energy 2022, 305, 117838. [Google Scholar] [CrossRef]
- Zhao, L.; Zou, H.; Gao, Q.; Yan, G.; Liu, F.; Tan, T.; Wei, K.; Zhang, W. Magnetically modulated orbit for human motion energy harvesting. Appl. Phys. Lett. 2019, 115, 263902. [Google Scholar] [CrossRef]
- Zhou, S.; Cao, J.; Erturk, A.; Lin, J. Enhanced broadband piezoelectric energy harvesting using rotatable magnets. Appl. Phys. Lett. 2013, 102, 173901. [Google Scholar] [CrossRef]
- Panda, S.; Hajra, S.; Mistewicz, K.; In-na, P.; Sahu, M.; Rajaitha, P.; Kim, H. Piezoelectric energy harvesting systems for biomedical applications. Nano Energy 2022, 100, 107514. [Google Scholar] [CrossRef]
- Zhang, Q.; Liu, Z.; Jiang, X.; Peng, Y.; Zhu, C.; Li, Z. Experimental investigation on performance improvement of cantilever piezoelectric energy harvesters via escapement mechanism from extremely Low-Frequency excitations. Sustain. Energy Technol. Assess. 2022, 53, 102591. [Google Scholar] [CrossRef]
- Su, Y.; Liu, Y.; Li, W.; Xiao, X.; Chen, C.; Lu, H.; Yuan, Z.; Tai, H.; Jiang, Y.; Zou, J. Others Sensing—Transducing coupled piezoelectric textiles for self-powered humidity detection and wearable biomonitoring. Mater. Horiz. 2023, 10, 842–851. [Google Scholar] [CrossRef]
- Yurchenko, D.; Val, D.; Lai, Z.; Gu, G.; Thomson, G. Energy harvesting from a DE-based dynamic vibro-impact system. Smart Mater. Struct. 2017, 26, 105001. [Google Scholar] [CrossRef]
- Liu, M.; Qian, F.; Mi, J.; Zuo, L. Biomechanical energy harvesting for wearable and mobile devices: State-of-the-art and future directions. Appl. Energy 2022, 321, 119379. [Google Scholar] [CrossRef]
- Thomson, G.; Lai, Z.; Val, D.; Yurchenko, D. Advantages of nonlinear energy harvesting with dielectric elastomers. J. Sound Vib. 2019, 442, 167–182. [Google Scholar] [CrossRef]
- Hassan, M.; Baker, K.; Ibrahim, A. Modeling of triboelectric vibration energy harvester under rotational magnetic excitation. In Smart Materials, Adaptive Structures and Intelligent Systems; American Society of Mechanical Engineers: New York, NY, USA, 2021; Volume 85499, p. V001T04A012. [Google Scholar]
- Haroun, A.; Tarek, M.; Mosleh, M.; Ismail, F. Recent Progress on Triboelectric Nanogenerators for Vibration Energy Harvesting and Vibration Sensing. Nanomaterials 2022, 12, 2960. [Google Scholar] [CrossRef]
- Lin, L.; Wang, S.; Niu, S.; Liu, C.; Xie, Y.; Wang, Z. Noncontact free-rotating disk triboelectric nanogenerator as a sustainable energy harvester and self-powered mechanical sensor. ACS Appl. Mater. Interfaces 2014, 6, 3031–3038. [Google Scholar] [CrossRef]
- Khandelwal, G.; Dahiya, R. Self-Powered Active Sensing Based on Triboelectric Generators. Adv. Mater. 2022, 34, 2200724. [Google Scholar] [CrossRef]
- Li, X.; Cao, Y.; Yu, X.; Xu, Y.; Yang, Y.; Liu, S.; Cheng, T.; Wang, Z. Breeze-driven triboelectric nanogenerator for wind energy harvesting and application in smart agriculture. Appl. Energy 2022, 306, 117977. [Google Scholar] [CrossRef]
- Jin, C.; Kia, D.; Jones, M.; Towfighian, S. On the contact behavior of micro-/nano-structured interface used in vertical-contact-mode triboelectric nanogenerators. Nano Energy 2016, 27, 68–77. [Google Scholar] [CrossRef]
- Rahman, M.; Rana, S.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Park, J. Biomechanical energy-driven hybridized generator as a universal portable power source for smart/wearable electronics. Adv. Energy Mater. 2020, 10, 1903663. [Google Scholar] [CrossRef]
- Wang, L.; Fei, Z.; Qi, Y.; Zhang, C.; Zhao, L.; Jiang, Z.; Maeda, R. Overview of Human Kinetic Energy Harvesting and Application. Acs Appl. Energy Mater. 2022, 5, 7091–7114. [Google Scholar] [CrossRef]
- Yi, J.; Dong, K.; Shen, S.; Jiang, Y.; Peng, X.; Ye, C.; Wang, Z. Fully fabric-based triboelectric nanogenerators as self-powered human–machine interactive keyboards. Nano-Micro Lett. 2021, 13, 103. [Google Scholar] [CrossRef]
- Zhang, L.; Meng, B.; Xia, Y.; Deng, Z.; Dai, H.; Hagedorn, P.; Peng, Z.; Wang, L. Galloping triboelectric nanogenerator for energy harvesting under low wind speed. Nano Energy 2020, 70, 104477. [Google Scholar] [CrossRef]
- Ren, Z.; Wu, L.; Pang, Y.; Zhang, W.; Yang, R. Strategies for effectively harvesting wind energy based on triboelectric nanogenerators. Nano Energy 2022, 100, 107522. [Google Scholar] [CrossRef]
- Xia, Y.; Tian, Y.; Zhang, L.; Ma, Z.; Dai, H.; Meng, B.; Peng, Z. An optimized flutter-driven triboelectric nanogenerator with a low cut-in wind speed. Micromachines 2021, 12, 366. [Google Scholar] [CrossRef]
- Wu, C.; Huang, H.; Li, R.; Fan, C. Research on the potential of spherical triboelectric nanogenerator for collecting vibration energy and measuring vibration. Sensors 2020, 20, 1063. [Google Scholar] [CrossRef]
- Zhao, H.; Ouyang, H. Theoretical investigation and experiment of a disc-shaped triboelectric energy harvester with a magnetic bistable mechanism. Smart Mater. Struct. 2021, 30, 095026. [Google Scholar] [CrossRef]
- Zi, Y.; Wang, J.; Wang, S.; Li, S.; Wen, Z.; Guo, H.; Wang, Z. Effective energy storage from a triboelectric nanogenerator. Nat. Commun. 2016, 7, 10987. [Google Scholar] [CrossRef] [PubMed]
- Yi, F.; Lin, L.; Niu, S.; Yang, P.; Wang, Z.; Chen, J.; Zhou, Y.; Zi, Y.; Wang, J.; Liao, Q. Others Stretchable-rubber-based triboelectric nanogenerator and its application as self-powered body motion sensors. Adv. Funct. Mater. 2015, 25, 3688–3696. [Google Scholar] [CrossRef]
- Zhang, X.; Han, M.; Wang, R.; Meng, B.; Zhu, F.; Sun, X.; Hu, W.; Wang, W.; Li, Z.; Zhang, H. High-performance triboelectric nanogenerator with enhanced energy density based on single-step fluorocarbon plasma treatment. Nano Energy 2014, 4, 123–131. [Google Scholar] [CrossRef]
- Aouali, K.; Kacem, N.; Bouhaddi, N.; Mrabet, E.; Haddar, M. Efficient broadband vibration energy harvesting based on tuned non-linearity and energy localization. Smart Mater. Struct. 2020, 29, 10LT01. [Google Scholar] [CrossRef]
- Gibus, D.; Gasnier, P.; Morel, A.; Formosa, F.; Charleux, L.; Boisseau, S.; Pillonnet, G.; Berlitz, C.; Quelen, A.; Badel, A. Strongly coupled piezoelectric cantilevers for broadband vibration energy harvesting. Appl. Energy 2020, 277, 115518. [Google Scholar] [CrossRef]
- Yan, B.; Yu, N.; Ma, H.; Wu, C. A theory for bistable vibration isolators. Mech. Syst. Signal Process. 2022, 167, 108507. [Google Scholar] [CrossRef]
- Fang, S.; Chen, K.; Xing, J.; Zhou, S.; Liao, W. Tuned bistable nonlinear energy sink for simultaneously improved vibration suppression and energy harvesting. Int. J. Mech. Sci. 2021, 212, 106838. [Google Scholar] [CrossRef]
- Daqaq, M. Response of uni-modal duffing-type harvesters to random forced excitations. J. Sound Vib. 2010, 329, 3621–3631. [Google Scholar] [CrossRef]
- Rysak, A.; Sedlmayr, M. Damping efficiency of the Duffing system with additional fractional terms. Appl. Math. Model. 2022, 111, 521–533. [Google Scholar] [CrossRef]
- Sebald, G.; Kuwano, H.; Guyomar, D.; Ducharne, B. Experimental Duffing oscillator for broadband piezoelectric energy harvesting. Smart Mater. Struct. 2011, 20, 102001. [Google Scholar] [CrossRef]
- Song, J.; Han, X.; Zou, Y.; Jiang, Y.; Bi, Q. Relaxation oscillation patterns induced by amplitude-modulated excitation in the Duffing system. Chaos Solitons Fractals 2022, 164, 112555. [Google Scholar] [CrossRef]
- Dulin, S.; Lin, K.; Serdukova, L.; Kuske, R.; Yurchenko, D. Improving the performance of a two-sided vibro-impact energy harvester with asymmetric restitution coefficients. Int. J. Mech. Sci. 2022, 217, 106983. [Google Scholar] [CrossRef]
- Jacquelin, E.; Adhikari, S.; Friswell, M. A piezoelectric device for impact energy harvesting. Smart Mater. Struct. 2011, 20, 105008. [Google Scholar] [CrossRef]
- Afsharfard, A.; Shin, H.; Hosseini, S.; Kim, E.; Lee, I.; Kim, K. Design of vibro-impact electromagnetic ocean-wave energy harvesting system; an experimental study. Ocean. Eng. 2022, 263, 112168. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, X.; Qin, Z.; Chu, F. Vibro-impact energy harvester for low frequency vibration enhanced by acoustic black hole. Appl. Phys. Lett. 2022, 121, 013902. [Google Scholar] [CrossRef]
- Ibrahim, A.; Ramini, A.; Towfighian, S. Triboelectric energy harvester with large bandwidth under harmonic and random excitations. Energy Rep. 2020, 6, 2490–2502. [Google Scholar] [CrossRef]
- Ibrahim, A.; Ramini, A.; Towfighian, S. Experimental and theoretical investigation of an impact vibration harvester with triboelectric transduction. J. Sound Vib. 2018, 416, 111–124. [Google Scholar] [CrossRef]
- Rezaei, M.; Talebitooti, R.; Liao, W. Investigations on magnetic bistable PZT-based absorber for concurrent energy harvesting and vibration mitigation: Numerical and analytical approaches. Energy 2022, 239, 122376. [Google Scholar] [CrossRef]
- Ibrahim, A.; Towfighian, S.; Younis, M.; Su, Q. Magnetoelastic beam with extended polymer for low frequency vibration energy harvesting. In Proceedings of the Smart Materials And Nondestructive Evaluation For Energy Systems 2016, Las Vegas, NV, USA, 20–24 March 2016; Volume 9806, pp. 71–85. [Google Scholar]
- Ibrahim, A.; Towfighian, S.; Younis, M. Dynamics of transition regime in bistable vibration energy harvesters. J. Vib. Acoust. 2017, 139, 051008. [Google Scholar] [CrossRef]
- Wang, Z.; Li, T.; Du, Y.; Yan, Z.; Tan, T. Nonlinear broadband piezoelectric vibration energy harvesting enhanced by inter-well modulation. Energy Convers. Manag. 2021, 246, 114661. [Google Scholar] [CrossRef]
- Su, X.; Leng, Y.; Sun, S.; Chen, X.; Xu, J. Theoretical and experimental investigation of a quad-stable piezoelectric energy harvester using a locally demagnetized multi-pole magnet. Energy Convers. Manag. 2022, 271, 116291. [Google Scholar] [CrossRef]
- Fu, Y.; Ouyang, H.; Benjamin Davis, R. Nonlinear structural dynamics of a new sliding-mode triboelectric energy harvester with multistability. Nonlinear Dyn. 2020, 100, 1941–1962. [Google Scholar] [CrossRef]
- Ibrahim, R. Recent advances in vibro-impact dynamics and collision of ocean vessels. J. Sound Vib. 2014, 333, 5900–5916. [Google Scholar] [CrossRef]
- Cao, D.; Xia, W.; Guo, X.; Lai, S. Modeling and experiment of vibro-impact vibration energy harvester based on a partial interlayer-separated piezoelectric beam. J. Intell. Mater. Syst. Struct. 2021, 32, 817–831. [Google Scholar] [CrossRef]
- Ibrahim, A.; Hassan, M. Extended bandwidth of 2DOF double impact triboelectric energy harvesting: Theoretical and experimental verification. Appl. Energy 2023, 333, 120593. [Google Scholar] [CrossRef]
- Zhao, C.; Hu, G.; Yang, Y. A cantilever-type vibro-impact triboelectric energy harvester for wind energy harvesting. Mech. Syst. Signal Process. 2022, 177, 109185. [Google Scholar] [CrossRef]
- Fu, Y.; Ouyang, H.; Davis, R. Triboelectric energy harvesting from the vibro-impact of three cantilevered beams. Mech. Syst. Signal Process. 2019, 121, 509–531. [Google Scholar] [CrossRef]
- Tan, D.; Zhou, J.; Wang, K.; Cai, C.; Xu, D. Modeling and analysis of the friction in a non-linear sliding-mode triboelectric energy harvester. Acta Mech. Sin. 2022, 38, 521330. [Google Scholar] [CrossRef]
- Zhang, J.; Qin, L. A tunable frequency up-conversion wideband piezoelectric vibration energy harvester for low-frequency variable environment using a novel impact-and rope-driven hybrid mechanism. Appl. Energy 2019, 240, 26–34. [Google Scholar] [CrossRef]
- Cao, D.; Ding, X.; Guo, X.; Yao, M. Design, simulation and experiment for a vortex-induced vibration energy harvester for low-velocity water flow. Int. J. Precis. Eng.-Manuf.-Green Technol. 2021, 8, 1239–1252. [Google Scholar] [CrossRef]
- Halim, M.; Park, J. Piezoceramic based wideband energy harvester using impact-enhanced dynamic magnifier for low frequency vibration. Ceram. Int. 2015, 41, S702–S707. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, Y. An impact-based broadband aeroelastic energy harvester for concurrent wind and base vibration energy harvesting. Appl. Energy 2018, 212, 233–243. [Google Scholar] [CrossRef]
- Lai, Z.; Wang, J.; Zhang, C.; Zhang, G.; Yurchenko, D. Harvest wind energy from a vibro-impact DEG embedded into a bluff body. Energy Convers. Manag. 2019, 199, 111993. [Google Scholar] [CrossRef]
- Qi, N.; Dai, K.; Wang, X.; You, Z. Optimization for piezoelectric energy harvesters with self-coupled structure: A double kill in bandwidth and power. Nano Energy 2022, 102, 107602. [Google Scholar] [CrossRef]
- Atmeh, M.; Ibrahim, A.; Ramini, A. Static and Dynamic Analysis of a Bistable Frequency Up-Converter Piezoelectric Energy Harvester. Micromachines 2023, 14, 261. [Google Scholar] [CrossRef] [PubMed]
- Yao, M.; Liu, P.; Ma, L.; Wang, H.; Zhang, W. Experimental study on broadband bistable energy harvester with L-shaped piezoelectric cantilever beam. Acta Mech. Sin. 2020, 36, 557–577. [Google Scholar] [CrossRef]
- Li, H.; Li, A. Potential of a vibro-impact nonlinear energy sink for energy harvesting. Mech. Syst. Signal Process. 2021, 159, 107827. [Google Scholar] [CrossRef]
- Zhou, J.; Zhao, X.; Wang, K.; Chang, Y.; Xu, D.; Wen, G. Bio-inspired bistable piezoelectric vibration energy harvester: Design and experimental investigation. Energy 2021, 228, 120595. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, Y.; Wu, M. Theory and experiment of nonlinear vibrations and dynamic snap-through phenomena for bi-stable asymmetric laminated composite square panels under foundation excitation. Compos. Struct. 2019, 225, 111140. [Google Scholar] [CrossRef]
- Atmeh, M.; Ibrahim, A. Modeling of Piezoelectric Vibration Energy Harvesting From Low-Frequency Using Frequency Up-Conversion. In Smart Materials, Adaptive Structures And Intelligent Systems; American Society of Mechanical Engineers: New York, NY, USA, 2021; Volume 85499, p. V001T04A011. [Google Scholar]
- Naseer, R.; Dai, H.; Abdelkefi, A.; Wang, L. Piezomagnetoelastic energy harvesting from vortex-induced vibrations using monostable characteristics. Appl. Energy 2017, 203, 142–153. [Google Scholar] [CrossRef]
- Harne, R.; Wang, K. A review of the recent research on vibration energy harvesting via bistable systems. Smart Mater. Struct. 2013, 22, 023001. [Google Scholar] [CrossRef]
- Drezet, C.; Kacem, N.; Bouhaddi, N. Design of a nonlinear energy harvester based on high static low dynamic stiffness for low frequency random vibrations. Sens. Actuators A Phys. 2018, 283, 54–64. [Google Scholar] [CrossRef]
- Costa, L.; Monteiro, L.; Pacheco, P.; Savi, M. A parametric analysis of the nonlinear dynamics of bistable vibration-based piezoelectric energy harvesters. J. Intell. Mater. Syst. Struct. 2021, 32, 699–723. [Google Scholar] [CrossRef]
- Zhu, D.; Beeby, S. A broadband electromagnetic energy harvester with a coupled bistable structure. J. Phys. Conf. Ser. 2013, 476, 012070. [Google Scholar] [CrossRef]
- Arab Hassani, F.; Mogan, R.; Gammad, G.; Wang, H.; Yen, S.; Thakor, N.; Lee, C. Toward self-control systems for neurogenic underactive bladder: A triboelectric nanogenerator sensor integrated with a bistable micro-actuator. ACS Nano 2018, 12, 3487–3501. [Google Scholar] [CrossRef] [PubMed]
- Deng, H.; Ye, J.; Du, Y.; Zhang, J.; Ma, M.; Zhong, X. Bistable broadband hybrid generator for ultralow-frequency rectilinear motion. Nano Energy 2019, 65, 103973. [Google Scholar] [CrossRef]
- Zhao, H.; Ouyang, H. Structural and electrical dynamics of a grating-patterned triboelectric energy harvester with stick–slip oscillation and magnetic bistability. Nonlinear Dyn. 2022, 109, 479–506. [Google Scholar] [CrossRef]
- Younis, M. MEMS Linear and Nonlinear Statics and Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Beam (length × width × thickness) | () mm | |
| Beam Young’s modulus | E | 69 Gpa |
| Beam density | 2700 kg/m | |
| Impact damping coefficient | N.s/m | |
| Impact stiffness coefficient | N/M | |
| PDMS layer thickness | T | m |
| Resistance | R | 10 M |
| Magnets side length | mm | |
| Magnetic moment | A/m | |
| PDMS (length × width × thickness) | () mm | |
| PDMS vacuum permittivity |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qaseem, Q.; Ibrahim, A. Magnetic Bistability for a Wider Bandwidth in Vibro-Impact Triboelectric Energy Harvesters. Micromachines 2023, 14, 1008. https://doi.org/10.3390/mi14051008
Qaseem Q, Ibrahim A. Magnetic Bistability for a Wider Bandwidth in Vibro-Impact Triboelectric Energy Harvesters. Micromachines. 2023; 14(5):1008. https://doi.org/10.3390/mi14051008
Chicago/Turabian StyleQaseem, Qais, and Alwathiqbellah Ibrahim. 2023. "Magnetic Bistability for a Wider Bandwidth in Vibro-Impact Triboelectric Energy Harvesters" Micromachines 14, no. 5: 1008. https://doi.org/10.3390/mi14051008