1. Introduction
Due to the short wavelength, narrow beam, and good direction of laser, LiDAR has the advantages of a high resolution and strong anti-interference. LiDAR has been widely used in autonomous vehicles [
1], robotics [
2], aerial mapping [
3], atmospheric measurement [
4], and augmented reality [
5]. Especially with the boom in the autonomous vehicle industry, the research into vehicle LiDAR has received the attention of many research institutions at home and abroad.
LiDAR usually uses beam steering or flash illumination schemes [
6] to map the surrounding environment and realize three-dimensional imaging. However, the requirement of laser power for a flash scheme is very high, which brings a great burden to the power dissipation and heat dissipation of the system. In addition, laser power is limited by human eye safety, so the detection range of flash schemes is usually very limited. Commonly adopted beam steering schemes include the mechanical movement of optics, micro-electromechanical systems (MEMS) mirror scanning, and optical phased array beam steering. At present, most commercial LiDAR systems rely on mechanical movement for beam steering. For example, most of DJI’s products use a dual-prism structure; Hesai and Tudar use polyhedral rotating mirrors. The mechanical scanning technology is mature and can realize large angle steering. However, it has limitations regarding the scanning rate, long-term reliability, and system cost. Therefore, solid-state beam steering has attracted wide attention in recent years [
7]. Optical phased array (OPA) is a type of solid-state beam steering technology which promises agile and precise optical beam steering free of any mechanical movement.
In addition to the flash illumination and beam steering module, another important core of the LiDAR system is the choice of detection schemes. At present, most commercial LiDAR systems use direct time of flight (dTOF) technology for ranging. The LiDAR emits a beam of pulsed light. The distance between the LiDAR and a target can be obtained by directly measuring the time delay of the received pulses. The ranging accuracy of dTOF is limited by the measurement accuracy of the time, the pulse bandwidth, and the response speed of the photodetector. dToF is also known to be susceptible to interference from ambient light and light from another LiDAR operating in the same wavelength. Compared with dTOF, frequency-modulated continuous-wave (FMCW) is a technology promising high accuracy and immunity to ambient or multi-LiDAR interference thanks to the coherent detection nature by mixing the frequency-chirped reflected signal with a local oscillator to extract the beat frequency corresponding to distances. In addition, the local oscillator acts as an optical amplifier which drastically reduces the demand for output optical power, benefiting power consumption and eye safety. In addition, FMCW LiDAR can not only provide distance measurement, but simultaneously obtain velocity information from the Doppler effect. It is believed that constructing such a location-based distance–velocity 4-dimensional field may benefit a perception system in tasks such as object detection and semantic segmentation. FMCW LiDAR generally adopts a coaxial optical system, where the transmitting and receiving systems share the same optical path, which ensures that the propagation wavefront of the received light matches with the local light, so that the transmitted light and the receiving light are completely coherent. Compared with the design of transmitting and receiving separation, this design simplifies the system design, eliminates the short-range blind area, and is more conducive to multi-channel fusion and improves the frequency of the ranging points. Therefore, the coaxial FMCW ranging technology is also considered as an important development direction of LiDAR [
8].
The advancement in integrated photonics provides a predictable implementation path for low-cost on-chip solid-state beam steering LiDAR. In recent years, integrated optical phased array (OPA) has been widely studied because of its solid-state beam control ability [
9]. With the rapid development in silicon photonics, on-chip large-scale OPA becomes possible [
10]. Optical phased array can also achieve a large scanning angle and high scanning speed [
11,
12,
13]. At the same time, combined with FMCW ranging technology, solid-state FMCW LiDAR chips have been realized [
14]. All these research results provide strong support for the development of on-chip solid-state LiDAR.
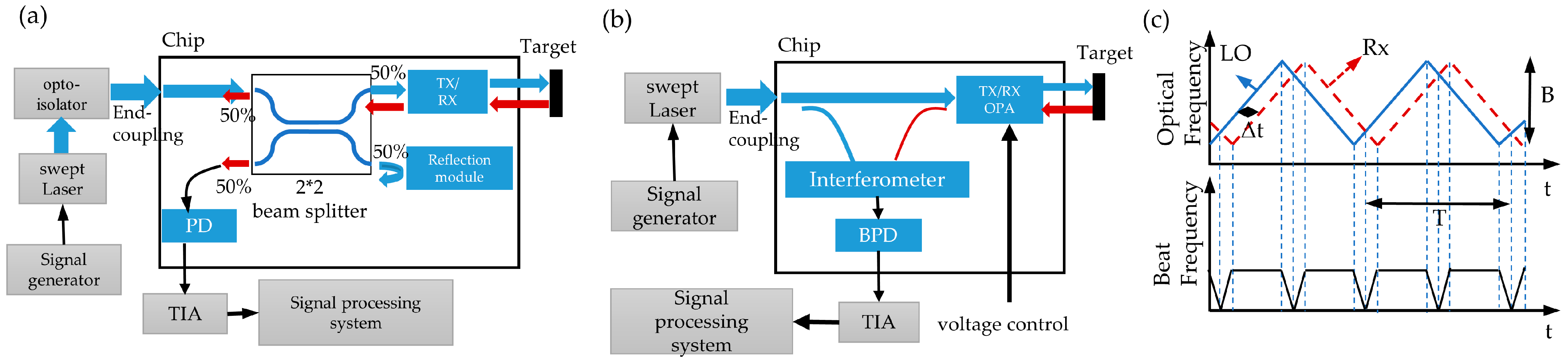
However, since a low loss circulator cannot be integrated on the chip at present, an on-chip coaxial coherent detection system can be built by a 2 × 2 beam splitter, as shown in
Figure 1a. The 2 × 2 beam splitter will cause an inherent loss of 6 dB. The linear frequency-modulated laser enters the 2 × 2 beam splitter along the input light path and is divided into two beams, where one beam is launched into free space along the emission light path, and the other beam is generally consumed or partially used as local light. In addition, the return light reflected by the target in free space is also divided into two beams by the 2 × 2 splitter, where one beam is transmitted along the laser input light path and, finally, lost by the isolator of the laser, and the other beam interferes with the local light to generate a detectable signal. Half of the transmitted and received optical power is divided by the 2 × 2 optical splitter, and the system directly loses 6 dB of optical power. The proposed chip-based LiDAR uses two interleaved optical phased arrays for coaxial transmitting and receiving. The approach saves 50% of the transmitting power compared with a common method using a 2 × 2 beam splitter for such a coaxial configuration as shown in
Figure 1a.
2. Design of on-Chip Solid-State FMCW System
The FMCW LiDAR system in this design, as shown in
Figure 1b, mainly consists of several parts: a signal generator, tunable laser, transmitting and receiving interleaved coaxial optical phased array (Tx/Rx OPA), interference system, balanced photodetector (BPD), transimpedance amplifier (TIA), and signal processor. The interleaved coaxial optical phased array is added to the FMCW ranging system as a transceiver to realize on-chip solid-state beam scanning. This design saves space and eliminates close-range blind areas. In addition, it can solve the alignment problem of noncoaxial systems. In this design, the working wavelength of the all-solid-state FMCW LiDAR on the chip is 1550 nm because wavelengths around 1550 nm are commonly used in telecom devices and the cost of continuous-wave sources is very low. The band also has the advantages of low atmospheric absorption and eye safety at a high power. It is also simple to perform a slight optical frequency chirp of a DFB laser through injection current modulation. In addition, 1550 nm is the transparent window in silicon. The use of silicon is desirable because of its CMOS compatibility. The theoretical basis of using triangular wave frequency modulation to achieve distance measurement is shown in
Figure 1b. The optical path difference between the received signal (Rx) and the local oscillator (LO) is transformed into a low-frequency signal by the method of coherent detection. The relationship between the distance and beat frequency is
where
τ is the delay between the received signal (Rx) and the local oscillator (LO),
B is the laser modulation bandwidth,
T is the laser modulation period, R is the distance to the target, and
c is the speed of light.
The traditional system relies on discrete components; facing the problems of large volume and complex structure, the integrated optical chips can be used to achieve a higher integration, smaller size, and lower-cost LiDAR scheme. The transmitting and receiving system, interference beat system, and photoelectric detection system are integrated on the silicon optical chip. The specific design of the optical chip is shown in
Figure 2a, including the edge-to-input coupler, directional coupler, optical splitter which consists of a cascade 1 × 2 multimode interference beam splitter, phase shifter array, coaxial transmit and receive grating array, interferer (multimode interference beam splitter, with splitter ratio of 2:2 is used, which is represented by M22), and balanced photodetector. The linear frequency modulation light coupled into the chip is divided into 2 beams by a directional coupler, where 90% of the light is divided into 32 channels by a 5-stage 1 × 2 multimode interference beam splitter network. After adjustment by the phase shifter array, the beam is transmitted from the transmitting array to generate a single-direction transmitting beam, which is reflected by the target and received by the receiving array to generate the signal light. In addition, 10% of the light divided by the directional coupler is taken as the local oscillator. The local oscillator interferes with the signal light on M22 and generates the beat signal. A variable optical attenuator is used to adjust the intensity of the local oscillator and increase the signal-to-noise ratio of the beat signal. The beat signal is detected on the balance detector.
In order to achieve a higher signal intensity, the receiving direction of the receiving array can be adjusted by the phase-shift array, and the intensity of the reference light can be adjusted by the on-chip variable optical attenuator. The system adopts a staggered coaxial transceiver optical phased array design. Compared with a common method using a 2 × 2 beam splitter for such a coaxial configuration, as shown in
Figure 1a, this design eliminates the 3 dB loss of the transmitting and saves 50% of the input optical power, in principle, with the same performance.
Figure 2b shows an optical micrograph of the chip.
Figure 2c shows the actual picture of the chip placed on a one yuan coin, and the corresponding overall size of the chip is 7.1 mm × 2 mm. The photonic chip (
Figure 2c) is fabricated on an SOI (silicon-on-insulator) platform with 2 µm buried oxide and 220 nm top silicon by Advanced Micro Foundry (AMF) (Singapore). As shown in
Figure 2d, the optical fiber block is pasted on the substrate to realize optical packaging. Electrical packaging is carried out at the same time. There are a total of 70 electrical packaging channels, 64 channels of which are used to control the direction of the phased array of transmission and reception, 3 electrical channels are used for the signal, offset, and grounding of the balance detector, 1 channel is used to adjust the adjustable attenuator to achieve the reference light intensity change, 1 electrical channel is used to monitor the coupling efficiency, and 1 electrical channel is grounded.
The transceiver optical phased array adopts an interleaved coaxial design to improve the receiving efficiency, and introduces nonuniformity or aperiodicity in the large spacing antenna array to suppress the grating lobes. As the divergence angle of the light beam is inversely proportional to the dimensions of the optical antennas, the long diffraction grating is designed to implement a small divergence angle. The design of the coaxial array with interleaved receiving and transmitting is shown in
Figure 3a.
The interleaved coaxial antenna is made of silicon waveguide and periodic nano-blocks. Light will form an evanescent field around the waveguide, and the nano-blocks periodically perturb the evanescent fields to form a weak-radiating grating, leading to a long effective radiation length required for highly directive optical phased arrays. The silicon waveguide is designed for a narrow waveguide, which makes the evanescent field larger. A trapezoidal mode size converter is used to connect the ordinary waveguide and the narrow waveguide. The design parameters of the antenna mainly include the period number of the periodic nano-blocks, period length w1, duty cycle w2/w1, the etching depth of the periodic nano-blocks, the gap between the nano-blocks and the waveguide, the width of the nano-blocks L1, the width of the waveguide wg1, the gap between the transmitting waveguide and the receiving waveguide gap1, the bending radius R, etc. The period of the nano-blocks determines the deflection angle of the antenna. The emitter–receiver efficiency is determined by the etching depth, duty cycle, grating width, antenna interval, and antenna period number. In addition, the number of periods of the periodic nano-blocks also determines the antenna size.
The specific design parameters are shown in
Figure 3c (red is the silicon structure, white is the silicon dioxide), where the narrowed waveguide width wg1 is 0.4 μm, the ordinary waveguide width wg is 0.5 μm, and the length of the mode size converter is 4 μm. The period length w1 is 1 μm, the duty ratio is 0.5, the etching depth of the periodic nano-blocks is 220 nm, the gap between the nano-blocks and the waveguide is 0.2 μm, the width of the nano-blocks L1 is 2 μm, the gap between the receiving and transmitting waveguides gap1 is 2.4 μm, the bending radius R is 2 μm, the number of periods N is 350, and the corresponding grating length L is 350 μm. With the increase in the number of periods N, the forward efficiency T of the antenna gradually decreases, and the relationship between T and N is an exponential function with base e, where N is the independent variable and the dissipation coefficient is α. Because the grating is too long to simulate, in order to quantitatively analyze the relationship between the forward efficiency T and the number of periods N at λ0 = 1.55 μm, the value of α is calculated according to the simulation results of FDTD. The average dissipation coefficient α ≈ −0.0093 is obtained by calculating the forward efficiency T of the grating from the 5th to the 40th period, and it is extended to the calculation formula of the forward efficiency T of any period gratings. Then, it is calculated that the forward efficiency of the grating tail is 0.93% when the number of periods is N = 350, and a trapezoidal waveguide is designed to dissipate the transmittance of the tail. The simulated far field of the grating (N = 50) is shown in
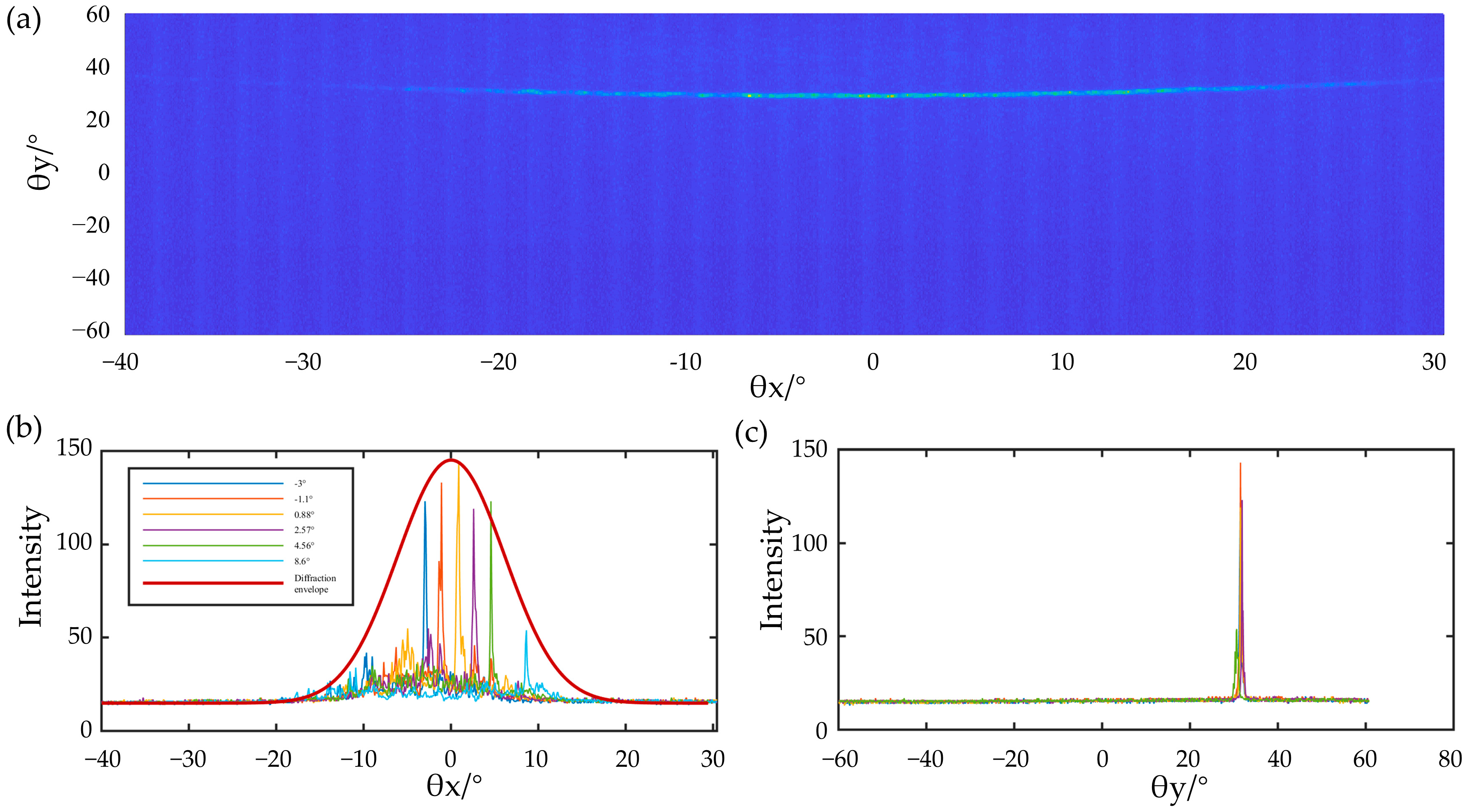
Figure 4a. The far-field deflection angle corresponding to the grating is 27°, and the diffraction envelope defined as the full width at half maximum (FWHM) of the far field is estimated to be 20°. The beam scanning within the antenna diffraction envelope can be realized by adjusting the phase of the phased array.
Within the diffraction envelope, the steering capability of the OPA is further limited by grating lobes resulting from the high order interference of an array of antennas. A nonuniform OPA has been successfully introduced to suppress the grating lobes. To achieve a higher grating lobe rejection ratio, we used a deep learning-based genetic optimization, as reported in our previous work [
15], to simultaneously optimize the antenna locations while meeting the required minimal spacing constraints. The key to the above algorithm is using a deep neutral networks (DNN) model to replace the crossover and mutation operations of the genetic algorithm while the DNN’s weights parameter is also updated in each evolution cycle. In this paper, the optimization problem is represented by two sets of parameters. One represents the locations of all the antennas, and the other represents the far-field optical performance. We use the peak-to-sidelobe suppressing ratio as the figure of merit (FoM). A 1 × 32 1D optical phased array is used in this design, where the minimum antenna spacing is 12 μm and the average antenna spacing is 16μm. The simulated one-dimensional far-field distribution obtained after the optimization of 1 × 32 OPA is shown in
Figure 4b. The far field is free of high order grating lobes with a peak-to-sidelobes suppressing ratio of 8 dB, defined as the ratio of the peak to the maximum of any sidelobes in the entire far-field space. In addition, the beam width is 0.6°, defined as null-to-null of the main lobe.


 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






