

Spatial Trajectory Tracking of Wall-Climbing Robot on Cylindrical Tank Surface Using Backstepping Sliding-Mode Control

Abstract
:1. Introduction
2. Robot System Design
2.1. Design Considerations
- Adsorption stability: a strong adsorption force is essential to keep the robot moving steadily on inclined or vertical walls without sliding.
- Climbing ability: a sufficient driving force can ensure the moving ability and load capacity of the inspection robot, especially when running on vertical surfaces.
- Load capacity: when carrying different equipment, the robot should overcome gravity and high-altitude resistance. Sufficient driving force and a lighter robot body can increase its load capacity.
- Obstacle-crossing capability: the robot should be able to smoothly pass small obstacles on the walls, e.g., weld seams, solder joints, etc.
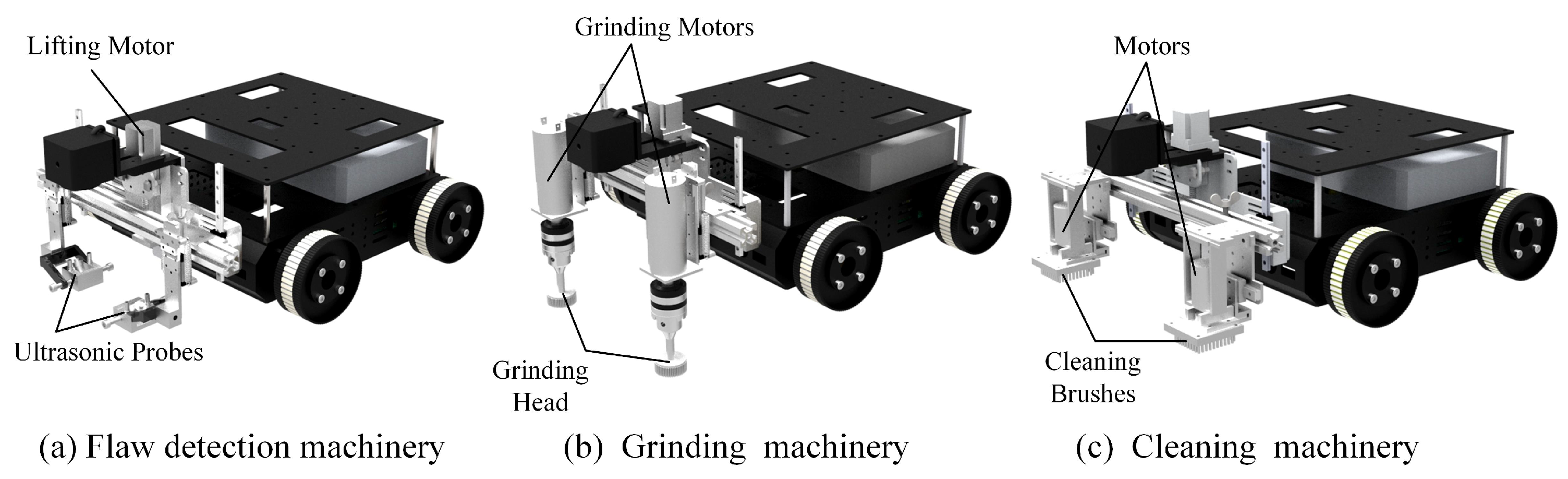
- Inspection and maintenance capabilities: in order to perform automated tasks, the robot should be able to carry different equipment for inspection and maintenance.
2.2. Mechanical Design
3. Three-Dimensional Positioning of the Wall-Climbing Robot
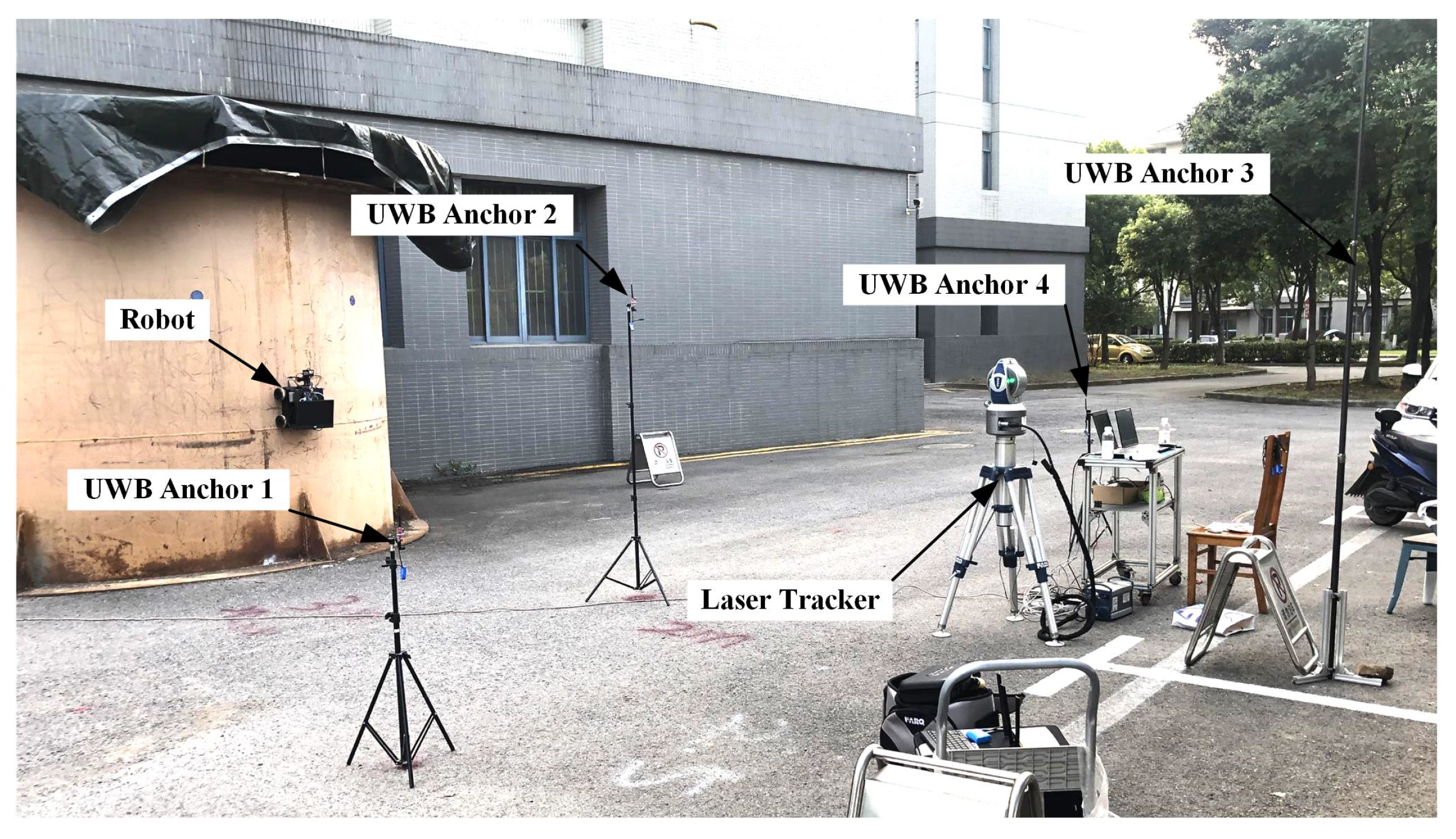
3.1. Spatial Coordinate Measurement by UWB
| Algorithm 1 Solve robot cylindrical coordinates. |
|
3.2. Multisensor Positioning Data Fusion
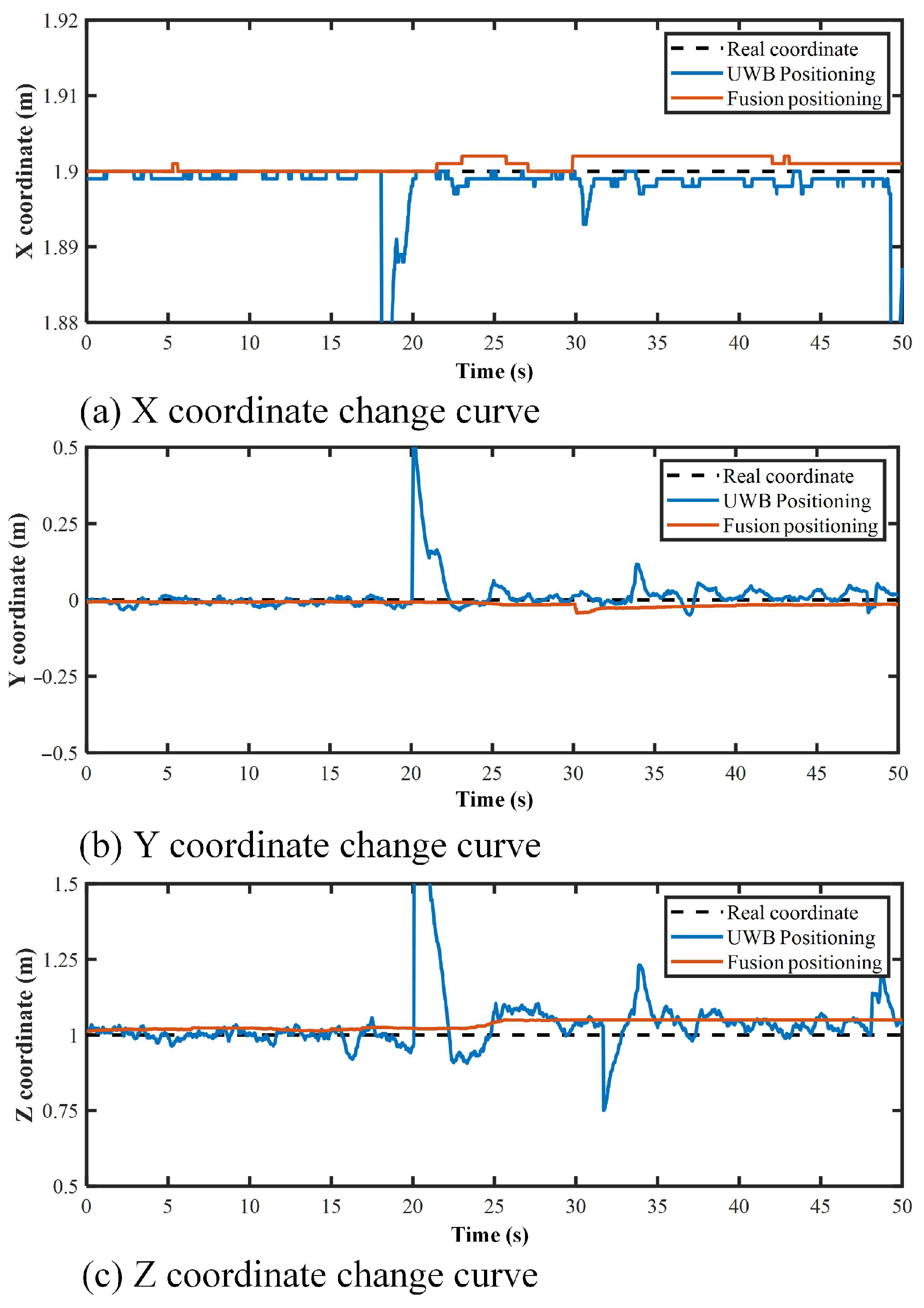
3.3. Robot-Positioning Accuracy Analysis
4. Backstepping Sliding-Mode Control
4.1. Kinematic Analysis
4.2. Tracking Error Analysis
4.3. Backstepping Sliding-Mode Control
- If converges to zero, decreases to zero exponentially with a time constant determined by ;
- If converges zero, . Based on Lyapunov function , error differential equation Equation (22) and Lemma 1, we can obtain that when and , converges to zero, which means converges to zero as well.
4.4. Stability Analysis
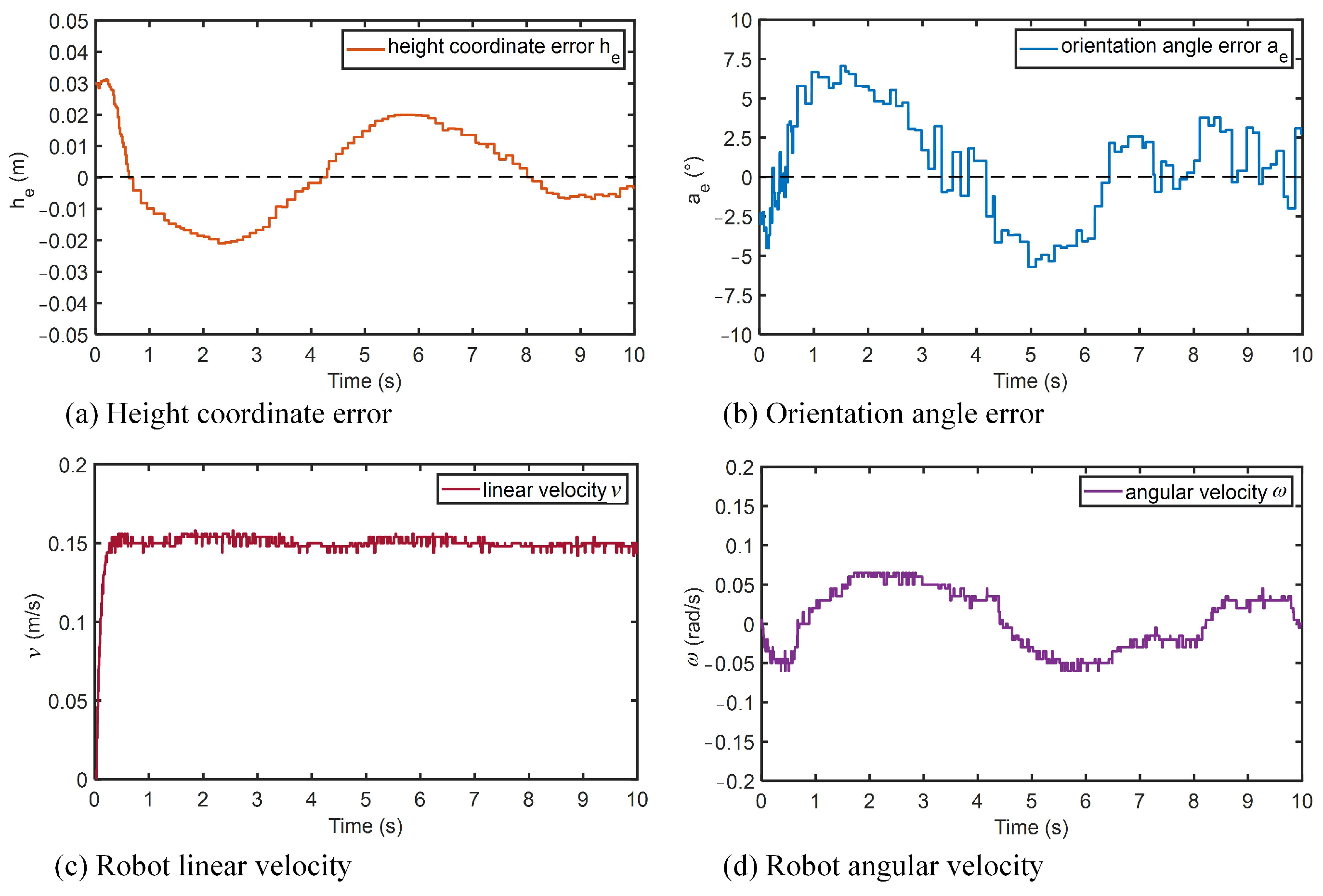
4.5. Numerical Simulation
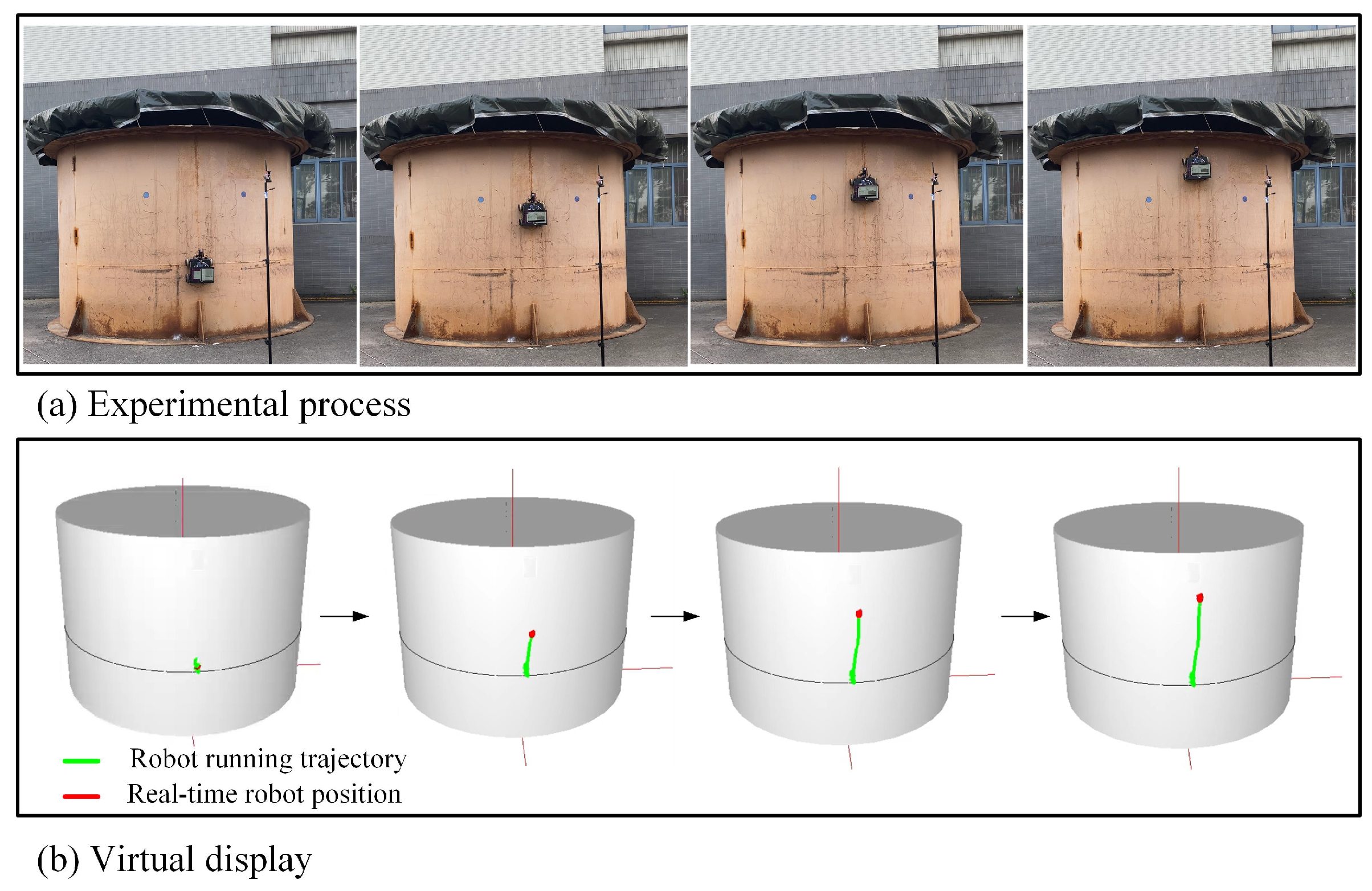
5. Prototype Experiments
5.1. Longitudinal Trajectory Tracking
5.2. Horizontal Trajectory Tracking
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Briones, L.; Bustamante, P.; Serna, M.A. Wall-climbing robot for inspection in nuclear power plants. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 1409–1414. [Google Scholar]
- Kalra, L.P.; Gu, J.; Meng, M. A wall climbing robot for oil tank inspection. In Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics, Kunming, China, 17–20 December 2006; pp. 1523–1528. [Google Scholar]
- Song, Y.K.; Lee, C.M.; Koo, I.M.; Tran, D.T.; Moon, H.; Choi, H.R. Development of wall climbing robotic system for inspection purpose. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 1990–1995. [Google Scholar]
- Shang, J.; Bridge, B.; Sattar, T.; Mondal, S.; Brenner, A. Development of a climbing robot for inspection of long weld lines. Ind. Robot. Int. J. 2008. [Google Scholar] [CrossRef]
- Fernández, R.; González, E.; Feliú, V.; Rodríguez, A.G. A wall climbing robot for tank inspection. An autonomous prototype . In Proceedings of the IECON 2010-36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 1424–1429. [Google Scholar]
- Yu, L.; Yang, E.; Ren, P.; Luo, C.; Dobie, G.; Gu, D.; Yan, X. Inspection robots in oil and gas industry: A review of current solutions and future trends. In Proceedings of the 2019 25th International Conference on Automation and Computing (ICAC), Lancaster, UK, 5–7 September 2019; pp. 1–6. [Google Scholar]
- Kuo, C.H.; Chou, H.C.; Chernousko, F.L.; Gradetsky, V.; Bolotnik, N.; Setijadi, E. Trajectory tracking of a wheeled wall climbing robot using PID controller. In Proceedings of the 2015 International Conference on Advanced Mechatronics, Intelligent Manufacture, and Industrial Automation (ICAMIMIA), Surabaya, Indonesia, 15–17 October 2015; pp. 143–146. [Google Scholar]
- Gimenez, A.; Abderrahim, M.; Padron, V.; Balaguer, C. Adaptive control strategy of climbing robot for inspection applications in construction industry. IFAC Proc. Vol. 2002, 35, 19–24. [Google Scholar] [CrossRef]
- Dian, S.; Fang, H.; Zhao, T.; Wu, Q.; Hu, Y.; Guo, R.; Li, S. Modeling and trajectory tracking control for magnetic wheeled mobile robots based on improved dual-heuristic dynamic programming. IEEE Trans. Ind. Inform. 2020, 17, 1470–1482. [Google Scholar] [CrossRef]
- Zhong, Z.; Xu, M.; Xiao, J.; Lu, H. Design and control of an omnidirectional mobile wall-climbing robot. Appl. Sci. 2021, 11, 11065. [Google Scholar] [CrossRef]
- Wu, X.; Liu, J.; Zhou, Y.; Lv, Q.; Hu, C. Movement control and attitude adjustment of climbing robot on flexible surfaces. IEEE Trans. Ind. Electron. 2017, 65, 2618–2628. [Google Scholar] [CrossRef]
- Xin, L.; Pengli, L.; Yang, L.; Wang, C. Back-Stepping Fuzzy Adaptive Sliding Mode Trajectory Tracking Control for Wall-Climbing Robot. J. Comput. 2019, 14, 662–679. [Google Scholar] [CrossRef]
- Wu, X.; Wang, C.; Hua, S. Adaptive extended state observer-based nonsingular terminal sliding mode control for the aircraft skin inspection robot. J. Intell. Robot. Syst. 2020, 98, 721–732. [Google Scholar] [CrossRef]
- Lee, G.; Kim, H.; Seo, K.; Kim, J.; Kim, H.S. MultiTrack: A multi-linked track robot with suction adhesion for climbing and transition. Robot. Auton. Syst. 2015, 72, 207–216. [Google Scholar] [CrossRef]
- Sakagami, N.; Yumoto, Y.; Takebayashi, T.; Kawamura, S. Development of dam inspection robot with negative pressure effect plate. J. Field Robot. 2019, 36, 1422–1435. [Google Scholar] [CrossRef]
- Liu, Y.; Sun, S.; Wu, X.; Mei, T. A wheeled wall-climbing robot with bio-inspired spine mechanisms. J. Bionic Eng. 2015, 12, 17–28. [Google Scholar] [CrossRef]
- Xu, F.; Meng, F.; Jiang, Q.; Peng, G. Grappling claws for a robot to climb rough wall surfaces: Mechanical design, grasping algorithm, and experiments. Robot. Auton. Syst. 2020, 128, 103501. [Google Scholar] [CrossRef]
- Cai, Z.; Tao, Z.; Bai, J.; Qu, G.; Zhang, S. Design of landing platform on climbing robot for a Small Unmanned Aerial Vehicle. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2015; pp. 2565–2570. [Google Scholar]
- Zhou, Q.; Li, X. Experimental investigation on climbing robot using rotation-flow adsorption unit. Robot. Auton. Syst. 2018, 105, 112–120. [Google Scholar] [CrossRef]
- Faruq Howlader, M.O.; Sattar, T.P. Novel adhesion mechanism and design parameters for concrete wall-climbing robot. In Proceedings of the 2015 SAI Intelligent Systems Conference (IntelliSys), London, UK, 10–11 November 2015; pp. 267–273. [Google Scholar]
- Li, B.; Ushiroda, K.; Yang, L.; Song, Q.; Xiao, J. Wall-climbing robot for non-destructive evaluation using impact-echo and metric learning SVM. Int. J. Intell. Robot. Appl. 2017, 1, 255–270. [Google Scholar] [CrossRef]
- La, H.M.; Dinh, T.H.; Pham, N.H.; Ha, Q.P.; Pham, A.Q. Automated robotic monitoring and inspection of steel structures and bridges. Robotica 2019, 37, 947–967. [Google Scholar] [CrossRef] [Green Version]
- Wang, R.; Kawamura, Y. An automated sensing system for steel bridge inspection using GMR sensor array and magnetic wheels of climbing robot. J. Sensors 2016, 2016, 8121678. [Google Scholar] [CrossRef] [Green Version]
- Cai, J.; He, K.; Fang, H.; Chen, H.; Hu, S.; Zhou, W. The design of permanent-magnetic wheeled wall-climbing robot. In Proceedings of the 2017 IEEE International Conference on Information and Automation (ICIA), Macau, China, 18–20 July 2017; pp. 604–608. [Google Scholar]
- Tang, C.; Zhou, G.; Gao, Z.; Shu, X.; Chen, P. A novel rail inspection robot and fault detection method for the coal mine hoisting system. IEEE Intell. Transp. Syst. Mag. 2019, 11, 110–121. [Google Scholar] [CrossRef]
- Li, J.; Wang, X.S. Novel omnidirectional climbing robot with adjustable magnetic adsorption mechanism. In Proceedings of the 2016 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–5. [Google Scholar]
- Amakawa, T.; Yamaguchi, T.; Yamada, Y.; Nakamura, T. Proposing an adhesion unit for a traveling-wave-type, omnidirectional wall-climbing robot in airplane body inspection applications. In Proceedings of the 2017 IEEE International Conference on Mechatronics (ICM), Gippsland, VIC, Australia, 13–15 February 2017; pp. 178–183. [Google Scholar]
- Huang, H.; Li, D.; Xue, Z.; Chen, X.; Liu, S.; Leng, J.; Wei, Y. Design and performance analysis of a tracked wall-climbing robot for ship inspection in shipbuilding. Ocean Eng. 2017, 131, 224–230. [Google Scholar] [CrossRef]
- Kermorgant, O. A magnetic climbing robot to perform autonomous welding in the shipbuilding industry. Robot. Comput. Integr. Manuf. 2018, 53, 178–186. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Fan, J.; Zhang, L.; Jiang, J.; He, S. Magnetic crawler climbing detection robot basing on metal magnetic memory testing technology. Robot. Auton. Syst. 2020, 125, 103439. [Google Scholar] [CrossRef]
- Hu, J.; Han, X.; Tao, Y.; Feng, S. A magnetic crawler wall-climbing robot with capacity of high payload on the convex surface. Robot. Auton. Syst. 2022, 148, 103907. [Google Scholar] [CrossRef]
- Teixeira, M.A.S.; Santos, H.B.; Dalmedico, N.; de Arruda, L.V.R.; de Oliveira, A.S. Intelligent environment recognition and prediction for NDT inspection through autonomous climbing robot. J. Intell. Robot. Syst. 2018, 92, 323–342. [Google Scholar] [CrossRef]
- Ding, Y.; Sun, Z.; Chen, Q. Non-contacted permanent magnetic absorbed wall-climbing robot for ultrasonic weld inspection of spherical tank. In Proceedings of the MATEC Web of Conferences. EDP Sciences, Athens, Greece, 3–6 September 2019; Volume 269, p. 02013. [Google Scholar]
- Li, J.; Jin, S.; Wang, C.; Xue, J.; Wang, X. Weld line recognition and path planning with spherical tank inspection robots. J. Field Robot. 2022, 39, 131–152. [Google Scholar] [CrossRef]
- Li, J.; Xue, J.; Fu, D.; Gui, C.; Wang, X. Position Estimation and Error Correction of Mobile Robots Based on UWB and Multisensors. J. Sens. 2022, 2022, 7071466. [Google Scholar] [CrossRef]
- Madgwick, S.O.; Harrison, A.J.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Wu, W.G.; Chen, H.T.; Wang, Y.J. Global trajectory tracking control of mobile robots. Acta Autom. Sin. 2001, 27, 326–331. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Dimension | |
| Wheel diameter | |
| Mass | |
| Payload | |
| Maximum climbing speed | |
| Motor power | |
| Adsorption force |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, J.; Chen, J.; Stancu, A.; Wang, X.; Li, J. Spatial Trajectory Tracking of Wall-Climbing Robot on Cylindrical Tank Surface Using Backstepping Sliding-Mode Control. Micromachines 2023, 14, 548. https://doi.org/10.3390/mi14030548
Xue J, Chen J, Stancu A, Wang X, Li J. Spatial Trajectory Tracking of Wall-Climbing Robot on Cylindrical Tank Surface Using Backstepping Sliding-Mode Control. Micromachines. 2023; 14(3):548. https://doi.org/10.3390/mi14030548
Chicago/Turabian StyleXue, Jiameng, Jingyu Chen, Alexsandru Stancu, Xingsong Wang, and Jie Li. 2023. "Spatial Trajectory Tracking of Wall-Climbing Robot on Cylindrical Tank Surface Using Backstepping Sliding-Mode Control" Micromachines 14, no. 3: 548. https://doi.org/10.3390/mi14030548