
A Novel Multi-Modal Teleoperation of a Humanoid Assistive Robot with Real-Time Motion Mimic


 , ,
, ,  ,
,
Abstract
:1. Introduction
2. State of the Art
3. Preliminaries
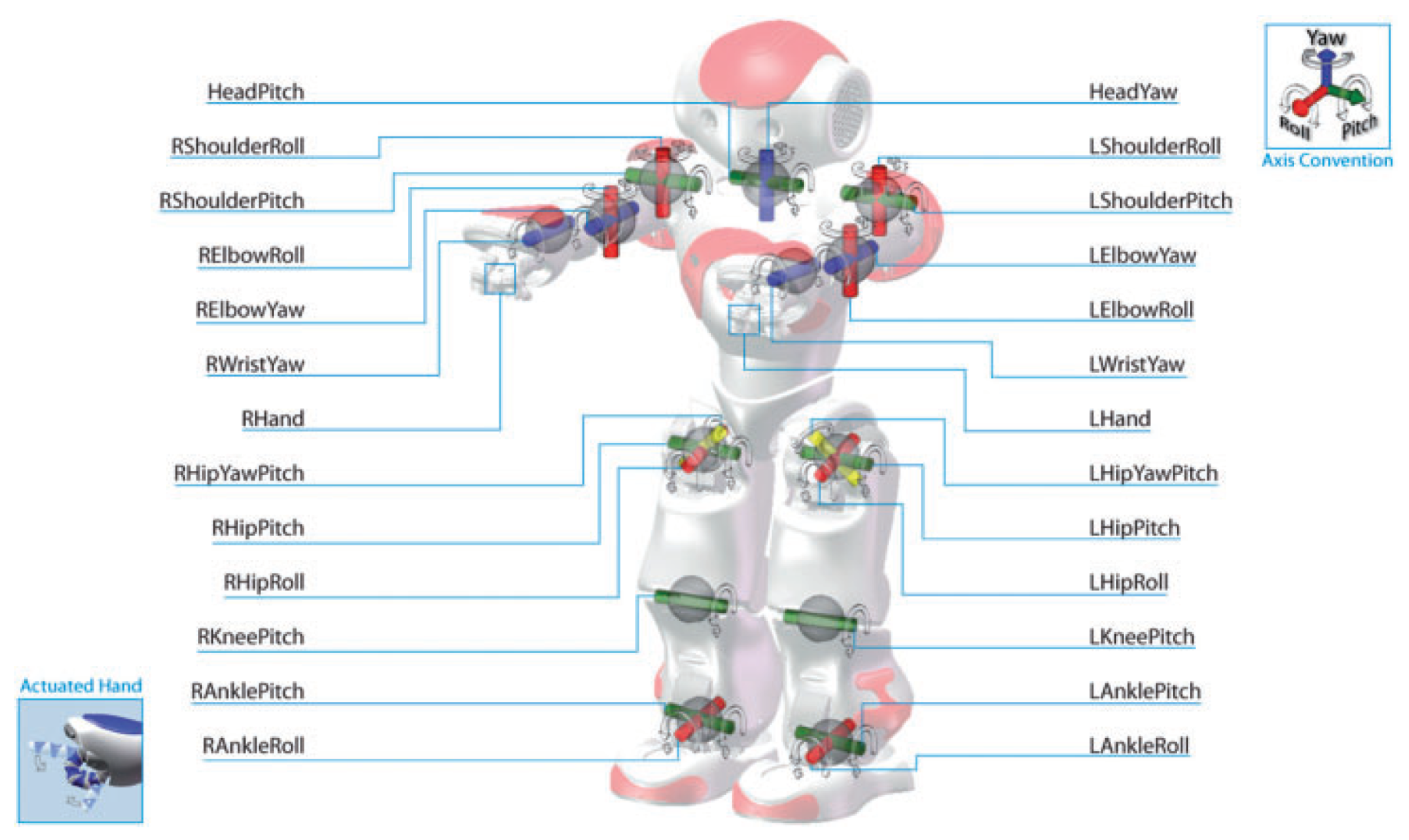
3.1. Humanoid Assistive Robot
3.2. Robot Operating System (ROS)
3.3. Kinect Sensor
3.4. Meta Quest
4. Control Architecture and Theoretical Analysis
| Algorithm 1: Main menu of the teleoperation system |
| 1:procedureROS NAO Node(Nodes and Topics) |
| 2:Create ROS NAO Node |
| 3:Create ROS Topic Subscriber to Kinect topic; |
| 4:Create ROS Topic Subscriber to Meta Quest topic; |
| 5:Create ROS Topic Subscriber to left Joycon topic; |
| 6:Create ROS Topic Subscriber to the right Joycon topic; |
| 7: for ROS NAO node exist do |
| 8: Print “Welcome to the NAO teleoperation system” |
| 9: Print “Press “START” to continue” |
| 10: if Joycon “START” button is pressed then |
| 11: if Joycon “X” button is pressed then |
| 12: Enter Joycon teleoperation mode; |
| 13: if Joycon “B” button is pressed then |
| 14: break; |
| 15: end if |
| 16: end if |
| 17: end if |
| 18: if Joycon “A” button is pressed then |
| 19: Enter Full teleoperation mode; |
| 20: if Joycon “B” button is pressed then |
| 21: break; |
| 22: end if |
| 23: end if |
| 24: end if |
| 25: Destroy ROS NAO Node; |
| 26: Destroy ROS Topic Subscriber to Kinect topic; |
| 27: Destroy ROS Topic Subscriber to Meta Quest topic; |
| 28: Destroy ROS Topic Subscriber to left Joycon topic; |
| 29: Destroy ROS Topic Subscriber to the right Joycon topic; |
| 30:end procedure |
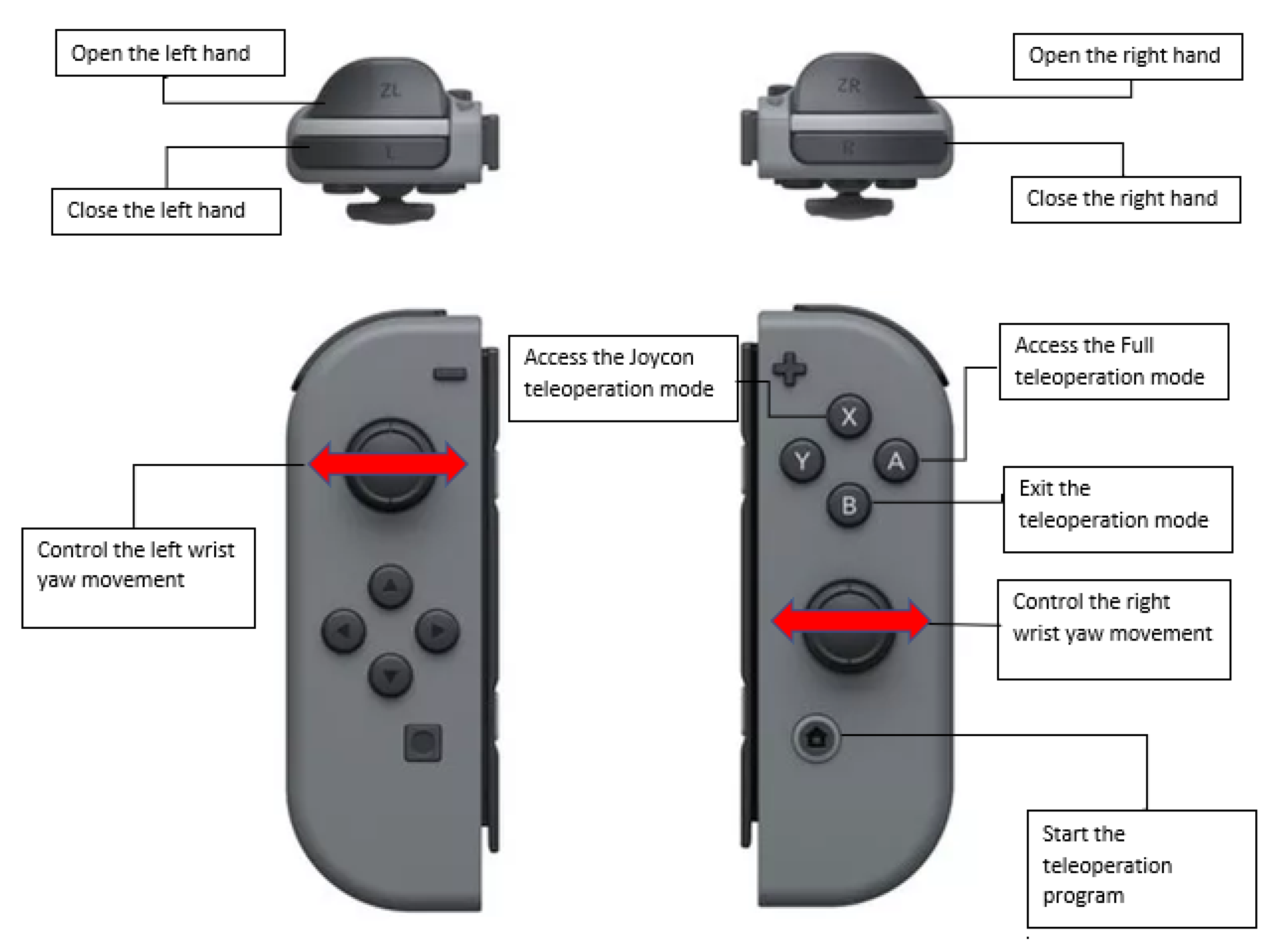
4.1. Joycon Teleoperation Mode
4.2. Full Teleoperation Mode
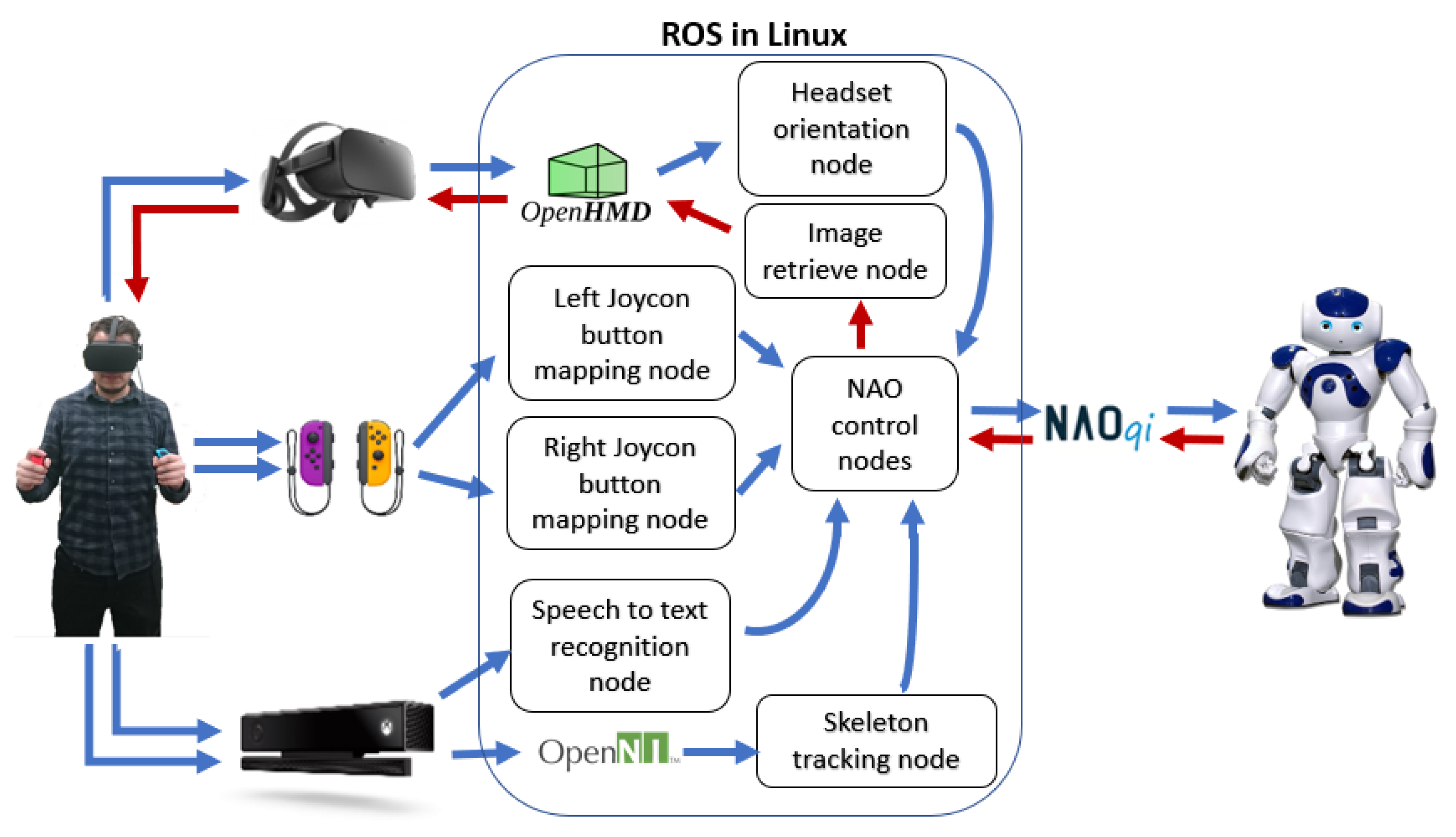
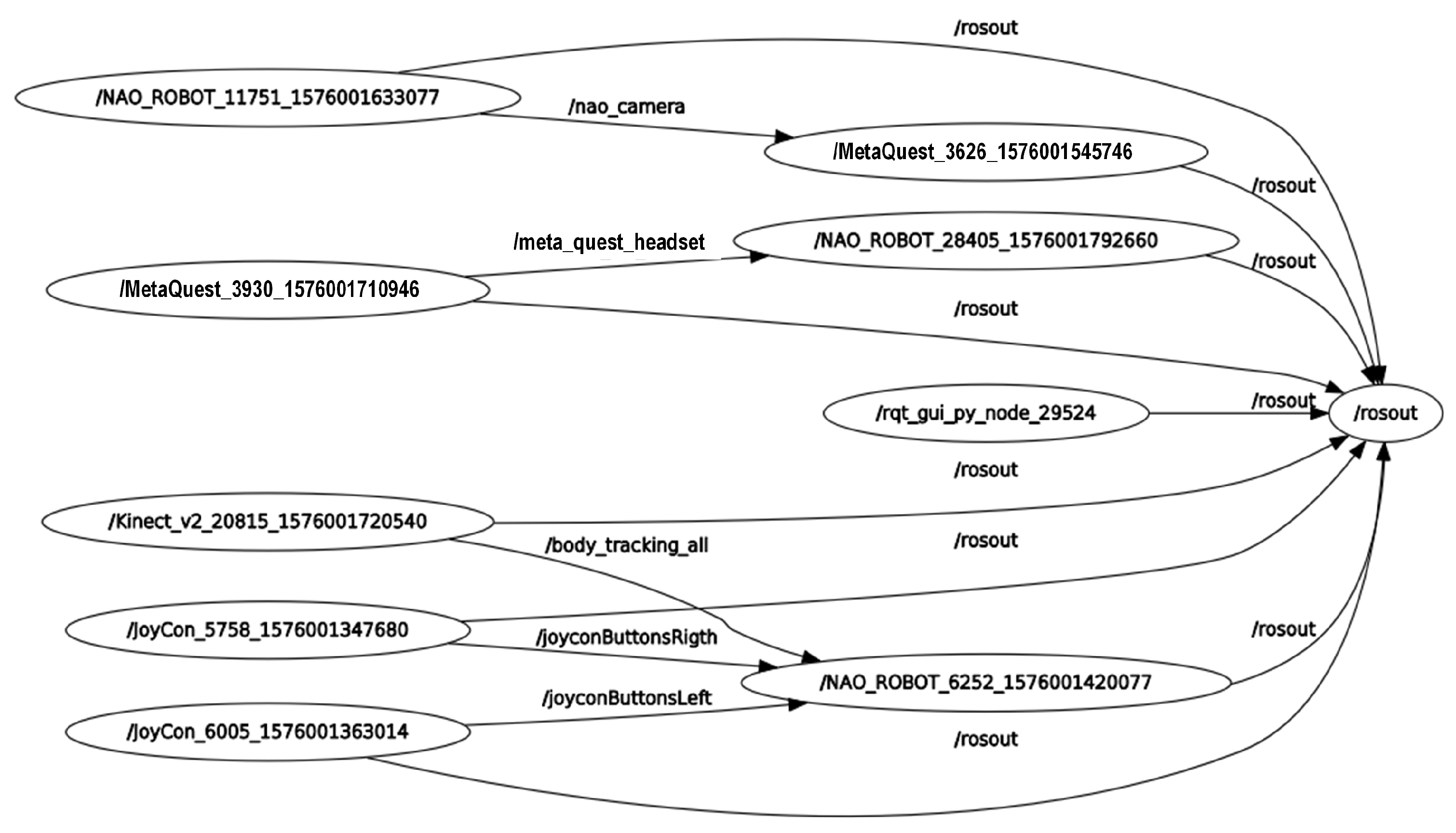
4.3. Node Architecture
4.4. Motion Capture
4.4.1. Solving and
4.4.2. Solving
4.4.3. Solving
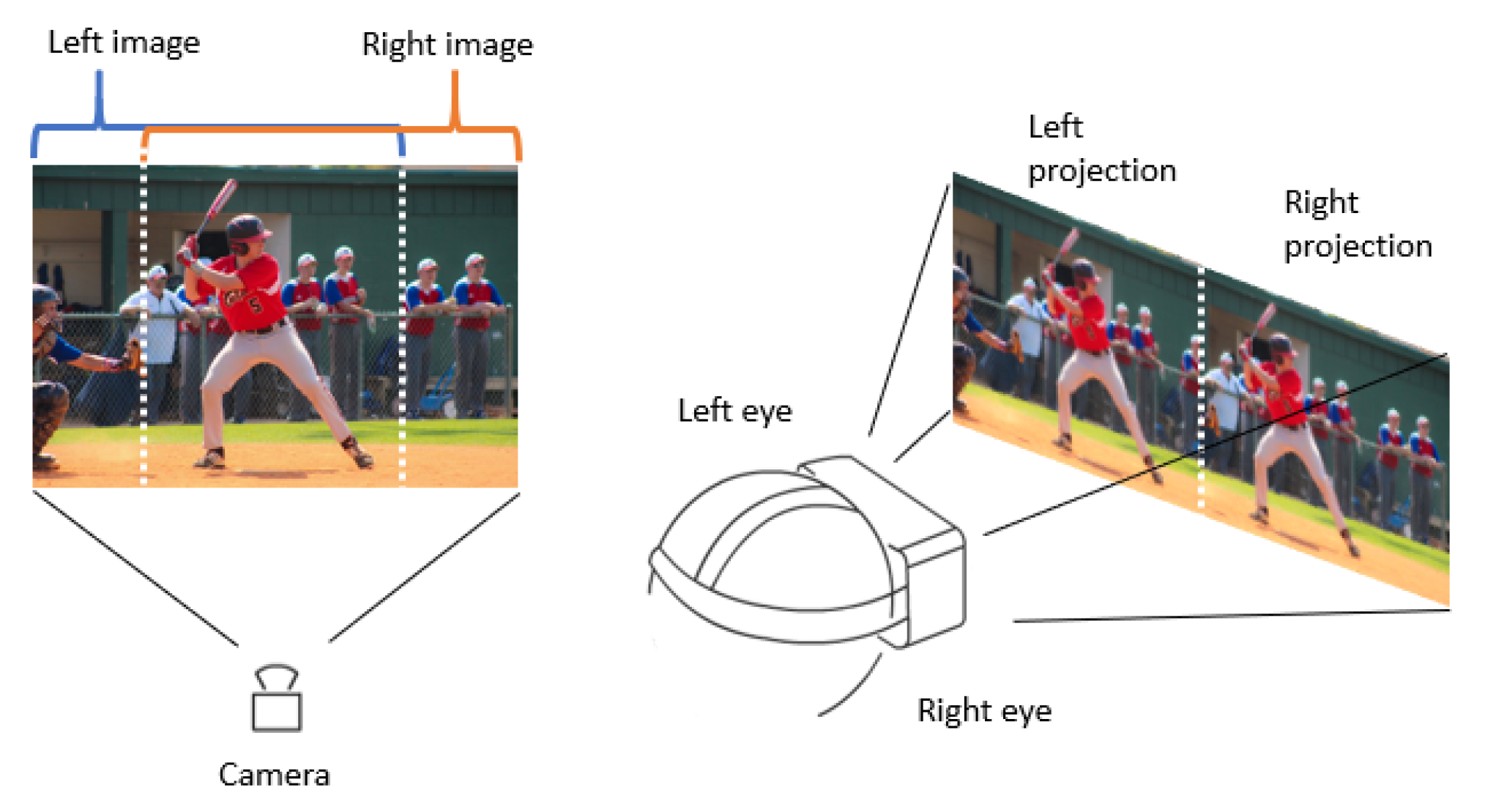
4.5. Image Retrieving
5. Results and Discussion
5.1. Head Motion Mimic
5.2. Arm Motion Mimic
5.3. Body Motion Mimic
5.4. Safety Routines
5.5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khandelwal, P.; Zhang, S.; Sinapov, J.; Leonetti, M.; Thomason, J.; Yang, F.; Gori, I.; Svetlik, M.; Khante, P.; Lifschitz, V.; et al. BWIBots: A platform for bridging the gap between AI and human–robot interaction research. Int. J. Robot. Res. 2017, 36, 635–659. [Google Scholar] [CrossRef] [Green Version]
- Setapen, A.; Quinlan, M.; Stone, P. Beyond teleoperation: Exploiting human motor skills with marionet. In Proceedings of the AAMAS 2010 Workshop on Agents Learning Interactively from Human Teachers (ALIHT), Toronto, ON, Canada, 10–14 May 2010. [Google Scholar]
- Halder, S.; Afsari, K.; Chiou, E.; Patrick, R.; Hamed, K.A. Construction inspection & monitoring with quadruped robots in future human-robot teaming: A preliminary study. J. Build. Eng. 2023, 65, 105814. [Google Scholar]
- Parasuraman, S.; Hock, P.S.; Khan, M.A.; Singh, D.K.J.; Han, C.Y. Behaviour coordinations and motion synchronizations for humanoid robot. Int. J. Adv. Robot. Syst. 2017, 14, 1–15. [Google Scholar] [CrossRef]
- Assad-Uz-Zaman, M. Design and Development of a Robot Guided Rehabilitation Scheme for Upper Extremity Rehabilitation. Ph.D. Thesis, The University of Wisconsin-Milwaukee, Milwaukee, WI, USA, 2017. [Google Scholar]
- Burns, R.B.; Seifi, H.; Lee, H.; Kuchenbecker, K.J. Getting in touch with children with autism: Specialist guidelines for a touch-perceiving robot. Paladyn J. Behav. Robot. 2021, 12, 115–135. [Google Scholar] [CrossRef]
- Lakatos, G.; Wood, L.J.; Syrdal, D.S.; Robins, B.; Zaraki, A.; Dautenhahn, K. Robot-mediated intervention can assist children with autism to develop visual perspective taking skills. Paladyn J. Behav. Robot. 2021, 12, 87–101. [Google Scholar] [CrossRef]
- Louie, W.Y.G.; Korneder, J.; Abbas, I.; Pawluk, C. A study on an applied behavior analysis-based robot-mediated listening comprehension intervention for ASD. Paladyn J. Behav. Robot. 2021, 12, 31–46. [Google Scholar] [CrossRef]
- Cooper, S.; Ros, R. Towards the Deployment of a Social Robot at an Elderly Day Care Facility. In Social Robotics: Proceedings of the 14th International Conference, ICSR 2022, Florence, Italy, 13–16 December 2022; Proceedings, Part II; Springer: Berlin/Heidelberg, Germany, 2023; pp. 277–287. [Google Scholar]
- Assad-Uz-Zaman, M.; Islam, M.R.; Rahman, M.H.; Wang, Y.C.; McGonigle, E. Kinect controlled NAO robot for telerehabilitation. J. Intell. Syst. 2021, 30, 224–239. [Google Scholar] [CrossRef]
- Stanton, C.; Bogdanovych, A.; Ratanasena, E. Teleoperation of a humanoid robot using full-body motion capture, example movements, and machine learning. In Proceedings of the Australasian Conference on Robotics and Automation, Wellington, New Zealand, 3–5 December 2012. [Google Scholar]
- Dajles, D.; Siles, F. Teleoperation of a Humanoid Robot Using an Optical Motion Capture System. In Proceedings of the 2018 IEEE International Work Conference on Bioinspired Intelligence (IWOBI), San Carlos, Costa Rica, 18–20 July 2018; pp. 1–8. [Google Scholar]
- Avalos, J.; Cortez, S.; Vasquez, K.; Murray, V.; Ramos, O.E. Telepresence using the kinect sensor and the NAO robot. In Proceedings of the 2016 IEEE 7th Latin American Symposium on Circuits Systems (LASCAS), Florianopolis, Brazil, 28 February–2 March 2016; pp. 303–306. [Google Scholar] [CrossRef]
- Almetwally, I.; Mallem, M. Real-time tele-operation and tele-walking of humanoid Robot Nao using Kinect Depth Camera. In Proceedings of the 2013 10th IEEE International Conference on Networking, Sensing and Control (ICNSC), Evry, France, 10–12 April 2013; pp. 463–466. [Google Scholar] [CrossRef]
- Rodriguez, I.; Astigarraga, A.; Jauregi, E.; Ruiz, T.; Lazkano, E. Humanizing NAO robot teleoperation using ROS. In Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 179–186. [Google Scholar] [CrossRef]
- Gong, L.; Chen, B.; Xu, W.; Liu, C.; Li, X.; Zhao, Z.; Zhao, L. Motion similarity evaluation between human and a tri-co robot during real-time imitation with a trajectory dynamic time warping model. Sensors 2022, 22, 1968. [Google Scholar] [CrossRef]
- Huamanchahua, D.; Ortiz-Zacarias, J.; Rojas-Tapara, Y.; Taza-Aquino, Y.; Quispe-Quispe, J. Human cinematic capture and movement system through kinect: A detailed and innovative review. In Proceedings of the 2022 IEEE International IOT, Electronics and Mechatronics Conference (IEMTRONICS), Toronto, ON, Canada, 1–4 June 2022; pp. 1–7. [Google Scholar]
- Cruz-Ramírez, S.R.; García-Martínez, M.; Olais-Govea, J.M. NAO robots as context to teach numerical methods. Int. J. Interact. Des. Manuf. 2022, 16, 1337–1356. [Google Scholar] [CrossRef]
- Mukherjee, S.; Paramkusam, D.; Dwivedy, S.K. Inverse kinematics of a NAO humanoid robot using kinect to track and imitate human motion. In Proceedings of the 2015 International Conference on Robotics, Automation, Control and Embedded Systems (RACE), Chennai, India, 18–20 February 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Li, C.; Yang, C.; Liang, P.; Cangelosi, A.; Wan, J. Development of Kinect based teleoperation of Nao robot. In Proceedings of the 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), Macau, China, 18–20 August 2016; pp. 133–138. [Google Scholar] [CrossRef] [Green Version]
- Mello, R.C.; Scheidegger, W.M.; Scheidegger, W.M.; Múnera, M.C.; Cifuentes, C.A.; Ribeiro, M.R.N. The PoundCloud framework for ROS-based cloud robotics: Case studies on autonomous navigation and human–robot interaction. Robot. Auton. Syst. 2022, 150, 103981. [Google Scholar] [CrossRef]
- Casañ, G.A.; Cervera, E.; Moughlbay, A.A.; Alemany, J.; Martinet, P. ROS-based online robot programming for remote education and training. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6101–6106. [Google Scholar] [CrossRef] [Green Version]
- Ajili, I.; Mallem, M.; Didier, J. Gesture recognition for humanoid robot teleoperation. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 1115–1120. [Google Scholar] [CrossRef] [Green Version]
- Sripada, A.; Asokan, H.; Warrier, A.; Kapoor, A.; Gaur, H.; Patel, R.; Sridhar, R. Teleoperation of a humanoid robot with motion imitation and legged locomotion. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 375–379. [Google Scholar]
- Fritsche, L.; Unverzag, F.; Peters, J.; Calandra, R. First-person tele-operation of a humanoid robot. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Korea, 3–5 November 2015; pp. 997–1002. [Google Scholar] [CrossRef] [Green Version]
- NAO the Humanoid and Programmable Robot|SoftBank Robotics. 2021. Available online: https://www.softbankrobotics.com/emea/en/nao (accessed on 9 February 2023).
- NAO—Technical Overview—Aldebaran 2.1.4.13 Documentation. 2017. Available online: http://doc.aldebaran.com/2-1/family/robots/index_robots.html (accessed on 30 December 2022).
- NAO—Actuator & Sensor List—Aldebaran 2.1.4.13 Documentation. 2017. Available online: http://doc.aldebaran.com/2-1/family/nao_dcm/actuator_sensor_names.html#actuator-sensor-list-nao (accessed on 9 February 2023).
- NAO—Versions and Body Type—Aldebaran 2.1.4.13 Documentation. 2017. Available online: http://doc.aldebaran.com/2-1/family/body_type.html#nao-version-bodytype (accessed on 9 February 2023).
- ROS: Home. 2022. Available online: https://www.ros.org (accessed on 30 December 2022).
- Kinect—Windows App Development. 2021. Available online: https://developer.microsoft.com/en-us/windows/kinect (accessed on 9 February 2023).
- González, A.; Gonzalez-Galvan, E.J.; Maya, M.; Cardenas, A.; Piovesan, D. Estimation of camera-space manipulation parameters by means of an extended Kalman filter: Applications to parallel robots. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419842987. [Google Scholar] [CrossRef]
- Falahati, S. OpenNI Cookbook; Packt Publishing: Birmingham, UK, 2023. [Google Scholar]
- Stübl, G.; Heindl, C.; Ebenhofer, G.; Bauer, H.; Pichler, A. Lessons Learned from Human Pose Interaction in an Industrial Spatial Augmented Reality Application. Procedia Comput. Sci. 2023, 217, 912–917. [Google Scholar] [CrossRef]
- Meta Quest 2: Immersive All-In-One VR Headset|Meta Store. 2022. Available online: https://www.meta.com/quest/products/quest-2/?utm_source=www.oculus.com&utm_medium=dollyredirect (accessed on 30 December 2022).
- OpenHMD–FOSS HMD Drivers for the People. 2022. Available online: http://www.openhmd.net (accessed on 30 December 2022).
- Nintendo Switch. 2021. Available online: https://store.nintendo.com/nintendo-switch/joy-con-controllers.html (accessed on 16 June 2021).
- Kofinas, N.; Orfanoudakis, E.; Lagoudakis, M.G. Complete analytical inverse kinematics for NAO. In Proceedings of the 2013 13th International Conference on Autonomous Robot Systems, Lisbon, Portugal, 24 April 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Brahmi, B.; Saad, M.; Rahman, M.H.; Ochoa-Luna, C. Cartesian trajectory tracking of a 7-DOF exoskeleton robot based on human inverse kinematics. IEEE Trans. Syst. Man Cybern. Syst. 2017, 49, 600–611. [Google Scholar] [CrossRef]
- WebVR Concepts—Web APIs|MDN. 2022. Available online: https://developer.mozilla.org/en-US/docs/Web/API/WebVR_API/Concepts (accessed on 30 December 2022).
- Mao, X.; Wen, X.; Song, Y.; Li, W.; Chen, G. Eliminating drift of the head gesture reference to enhance Google Glass-based control of an NAO humanoid robot. Int. J. Adv. Robot. Syst. 2017, 14, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Melinte, O.; Vladareanu, L.; Munteanu, L.; Yu, H.; Cang, S.; Hou, Z.; Bian, G.; Wang, H. Haptic intelligent interfaces for NAO robot hand control. In Proceedings of the 2015 International Conference on Advanced Mechatronic Systems (ICAMechS), Beijing, China, 22–24 August 2015; pp. 50–55. [Google Scholar] [CrossRef]
- Kittel-Ouimet, T. Commande d’un Bras Exosquelette Robotique à Sept Degrés de Liberté. Ph.D. Thesis, École de Technologie Supérieure, Montréal, QC, Canada, 2012. [Google Scholar]
- Nadel, J.; Grynszpan, O.; Martin, J.C. Autism and socially interactive agents. In The Handbook on Socially Interactive Agents: 20 Years of Research on Embodied Conversational Agents, Intelligent Virtual Agents, and Social Robotics Volume 2: Interactivity, Platforms, Application; Association for Computing Machinery: New York, NY, USA, 2022; pp. 437–462. [Google Scholar]
- Ismail, L.; Shamsuddin, S.; Yusoff, H.; Hanapiah, F.; Zahari, N. Robot-based Intervention Program for Autistic Children with Humanoid Robot NAO: Initial Response in Stereotyped Behavior. Procedia Eng. 2012, 41, 1441–1447. [Google Scholar] [CrossRef] [Green Version]
- Taheri, A.R.; Alemi, M.; Meghdari, A.; PourEtemad, H.R.; Basiri, N.M. Social robots as assistants for autism therapy in Iran: Research in progress. In Proceedings of the 2014 Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; pp. 760–766. [Google Scholar] [CrossRef]
- Shamsuddin, S.; Yussof, H.; Miskam, M.A.; Hamid, A.C.; Malik, N.A.; Hashim, H. Humanoid robot NAO as HRI mediator to teach emotions using game-centered approach for children with autism. In Proceedings of the HRI 2013 Workshop on Applications for Emotional Robots, Tokyo, Japan, 3–6 March 2013; Volume 33. [Google Scholar]
- Pennisi, P.; Tonacci, A.; Tartarisco, G.; Billeci, L.; Ruta, L.; Gangemi, S.; Pioggia, G. Autism and social robotics: A systematic review. Autism Res. 2016, 9, 165–183. [Google Scholar] [CrossRef] [PubMed]
- Malik, N.A.; Yussof, H.; Hanapiah, F.A. Development of imitation learning through physical therapy using a humanoid robot. Procedia Comput. Sci. 2014, 42, 191–197. [Google Scholar] [CrossRef] [Green Version]
- Shamsuddin, S.; Yussof, H.; Ismail, L.; Hanapiah, F.A.; Mohamed, S.; Piah, H.A.; Zahari, N.I. Initial response of autistic children in human-robot interaction therapy with humanoid robot NAO. In Proceedings of the 2012 IEEE 8th International Colloquium on Signal Processing and Its Applications, Malacca, Malaysia, 23–25 March 2012; pp. 188–193. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint(i) | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | 0 | −/2 |
| 2 | /2 | 0 | 0 | |
| 3 | /2 | 0 | ||
| 4 | −/2 | 0 | 0 | |
| 5 | /2 | 0 |
| Angle | NAO Joint | Modified Angle |
|---|---|---|
| RShoulderRoll | − 90° | |
| RShoulderPitch | ||
| RElbowYaw | 90°− | |
| RElbowRoll | 180°− | |
| LShoulderRoll | 90°− | |
| LShoulderPitch | ||
| LElbowYaw | −90°− | |
| LElbowRoll | −180° |
| Angle | OR Angle Name | NAO Joint | Modified Angle |
|---|---|---|---|
| Roll | HeadPitch | ||
| Pitch | HeadYaw |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cerón, J.C.; Sunny, M.S.H.; Brahmi, B.; Mendez, L.M.; Fareh, R.; Ahmed, H.U.; Rahman, M.H. A Novel Multi-Modal Teleoperation of a Humanoid Assistive Robot with Real-Time Motion Mimic. Micromachines 2023, 14, 461. https://doi.org/10.3390/mi14020461
Cerón JC, Sunny MSH, Brahmi B, Mendez LM, Fareh R, Ahmed HU, Rahman MH. A Novel Multi-Modal Teleoperation of a Humanoid Assistive Robot with Real-Time Motion Mimic. Micromachines. 2023; 14(2):461. https://doi.org/10.3390/mi14020461
Chicago/Turabian StyleCerón, Julio C., Md Samiul Haque Sunny, Brahim Brahmi, Luis M. Mendez, Raouf Fareh, Helal Uddin Ahmed, and Mohammad H. Rahman. 2023. "A Novel Multi-Modal Teleoperation of a Humanoid Assistive Robot with Real-Time Motion Mimic" Micromachines 14, no. 2: 461. https://doi.org/10.3390/mi14020461