
Hardness-and-Type Recognition of Different Objects Based on a Novel Porous Graphene Flexible Tactile Sensor Array

Abstract
:1. Introduction
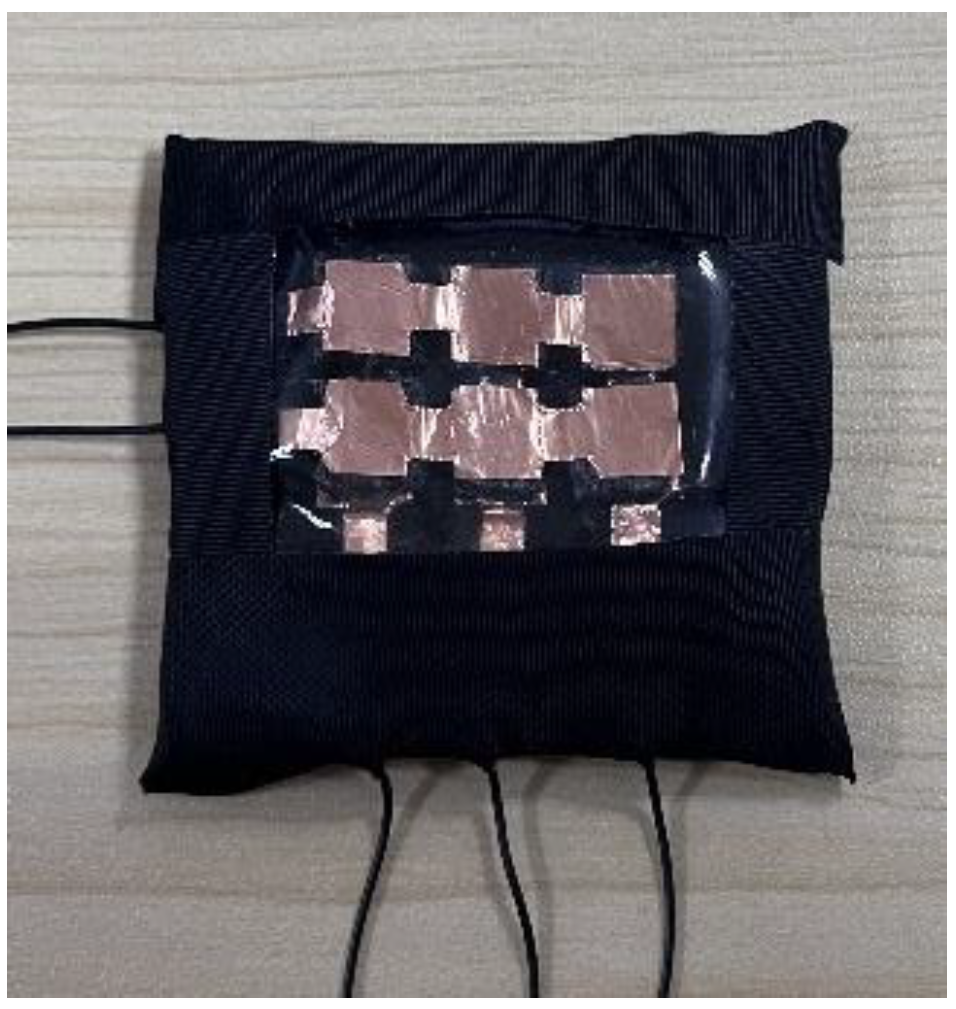
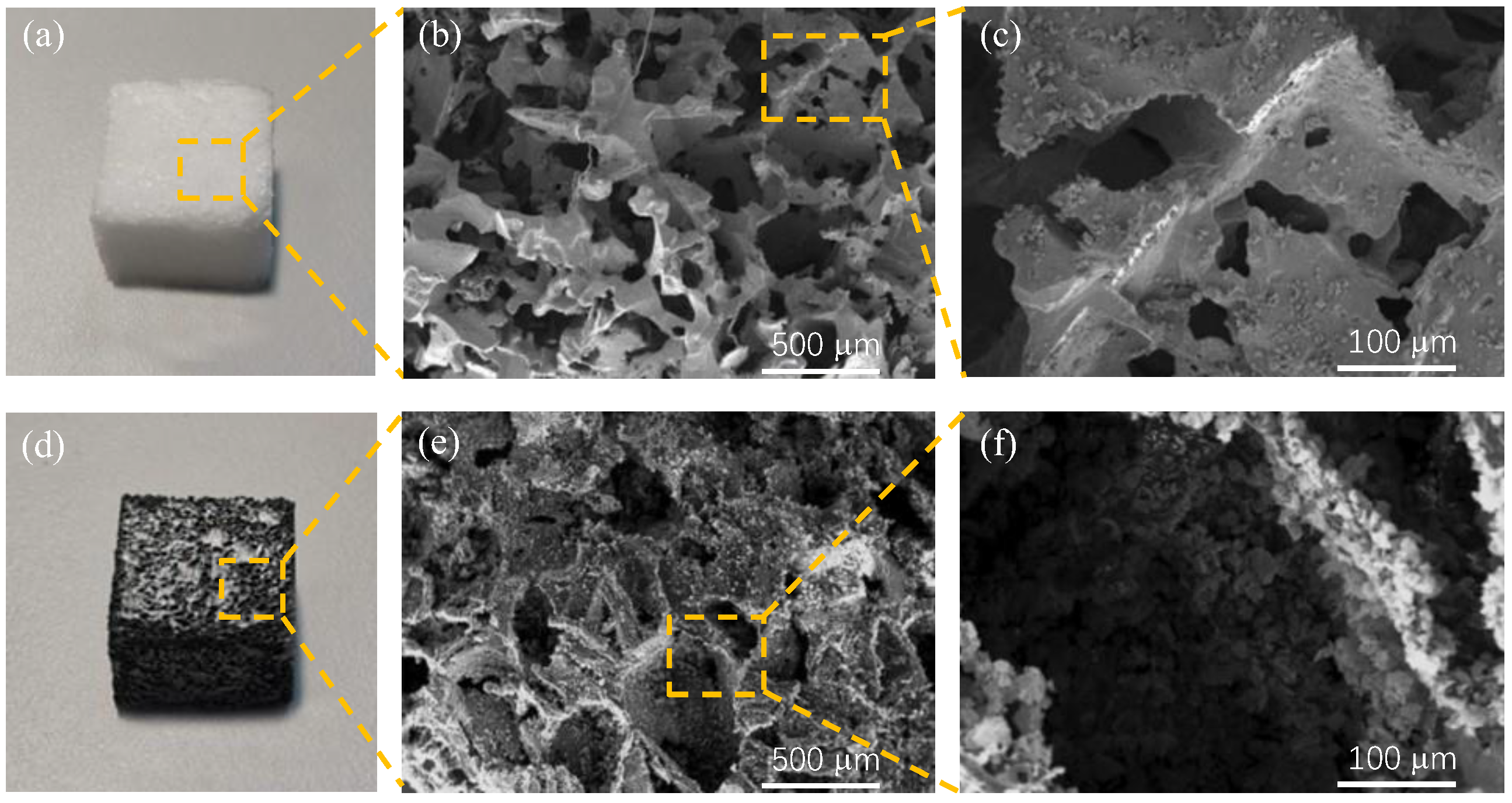
2. Structure Design and Fabrication Procedure
3. Data Acquisition System
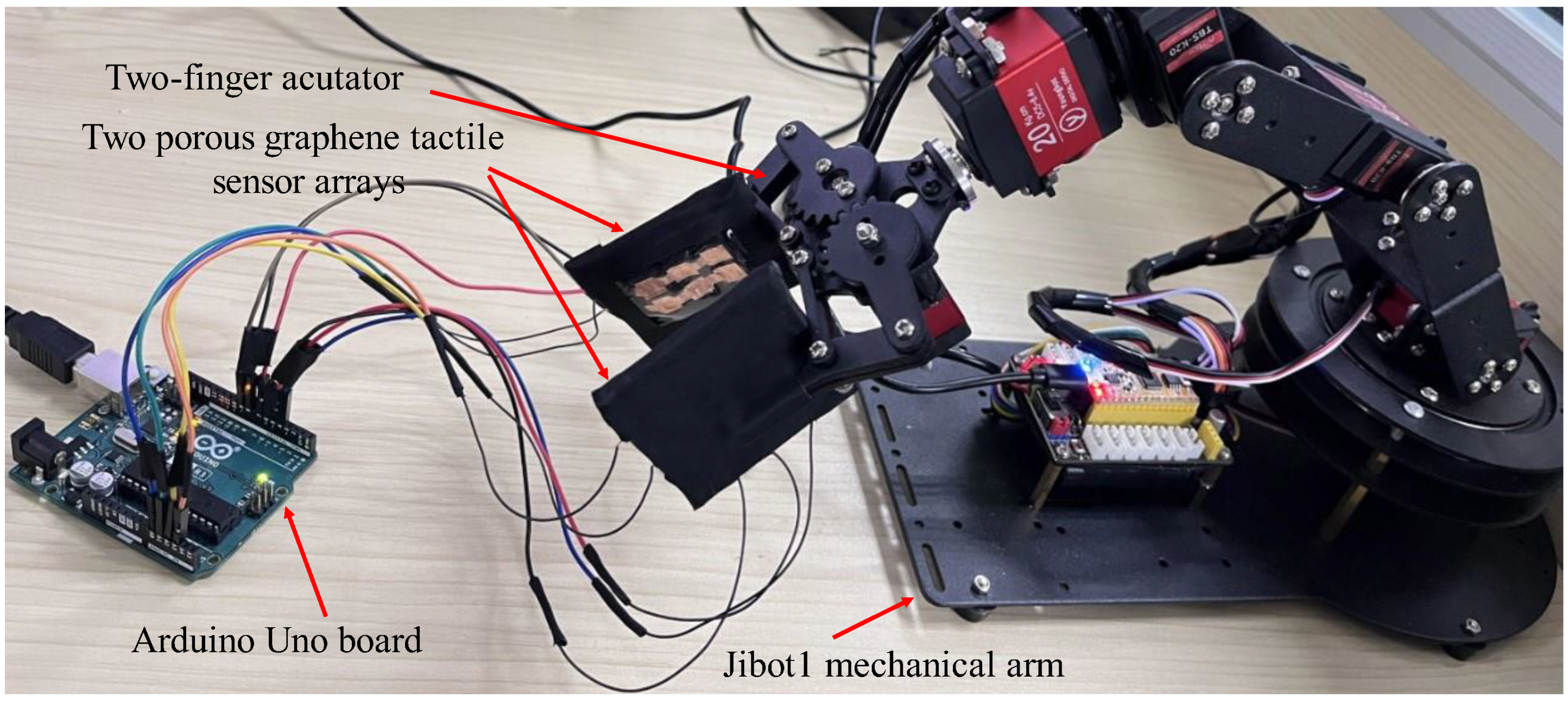
3.1. Data Acquisition Device
3.2. Data Acquisition
3.2.1. Objects for Experiments
3.2.2. Data Acquisition Method
3.3. Data Preprocessing
4. Construction of the Residual Network Model
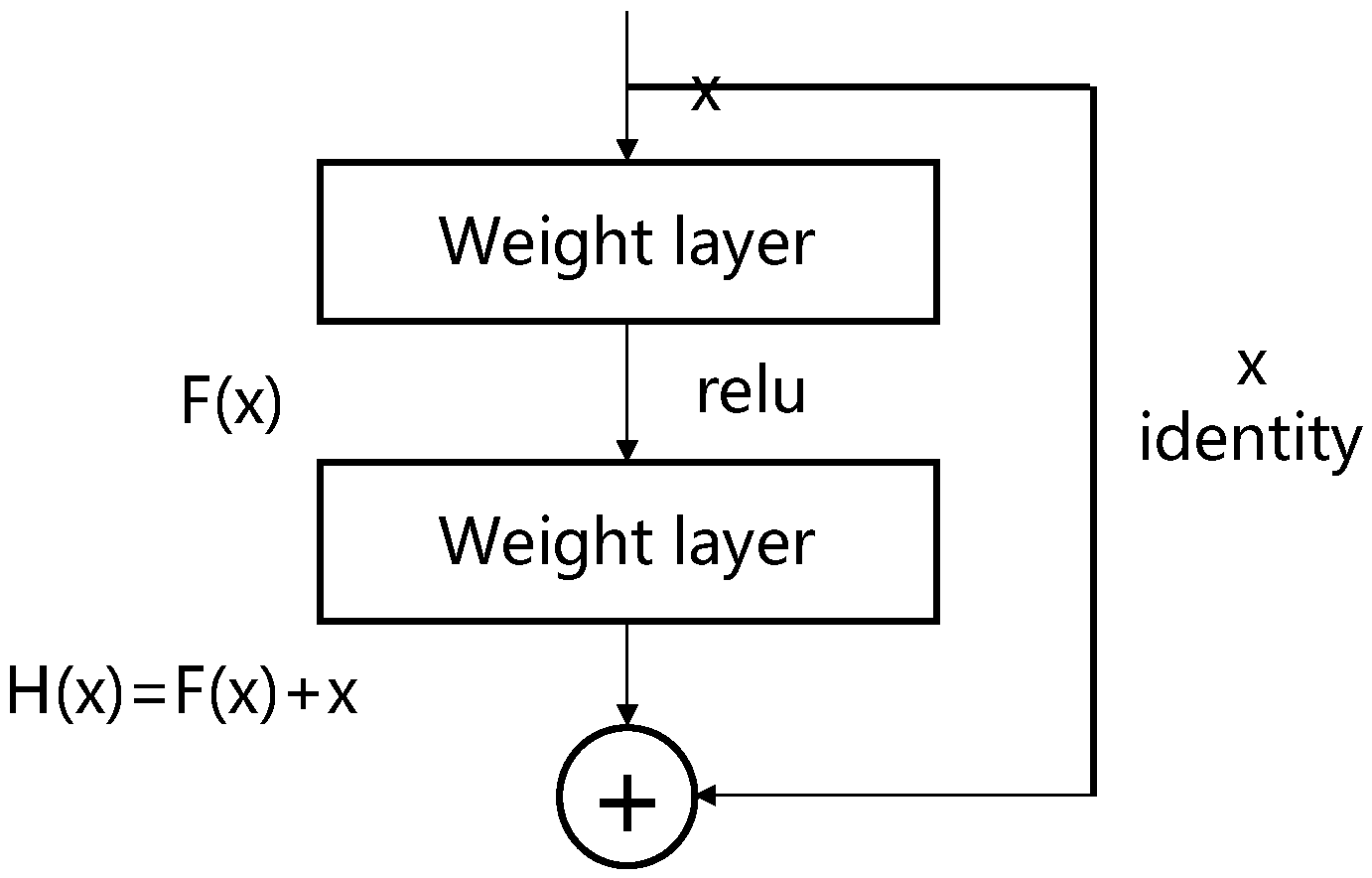
4.1. Principle of the Residual Network
4.2. The ResNet Model for the Tactile Sensor Array
5. Analysis and Discussion of Experimental Results
5.1. Hardness Recognition of Objects Based on the ResNet Model
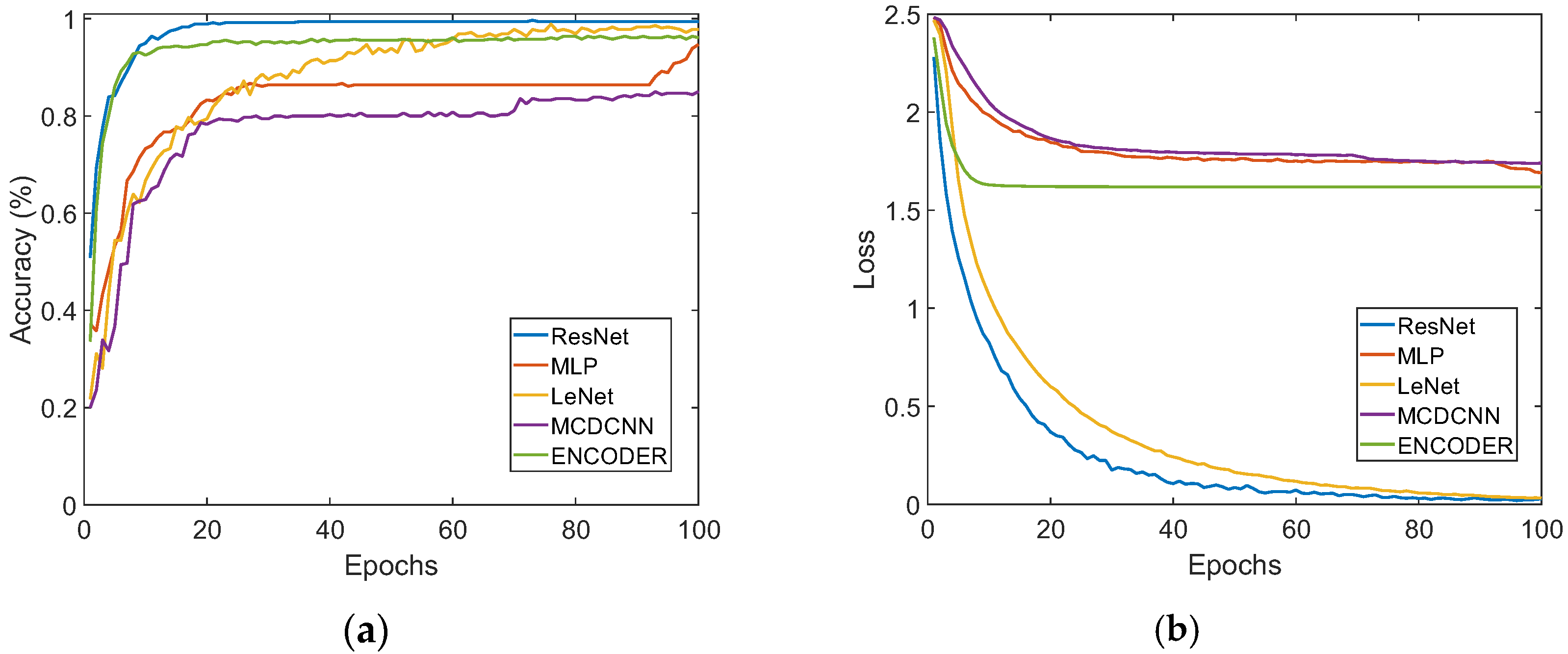
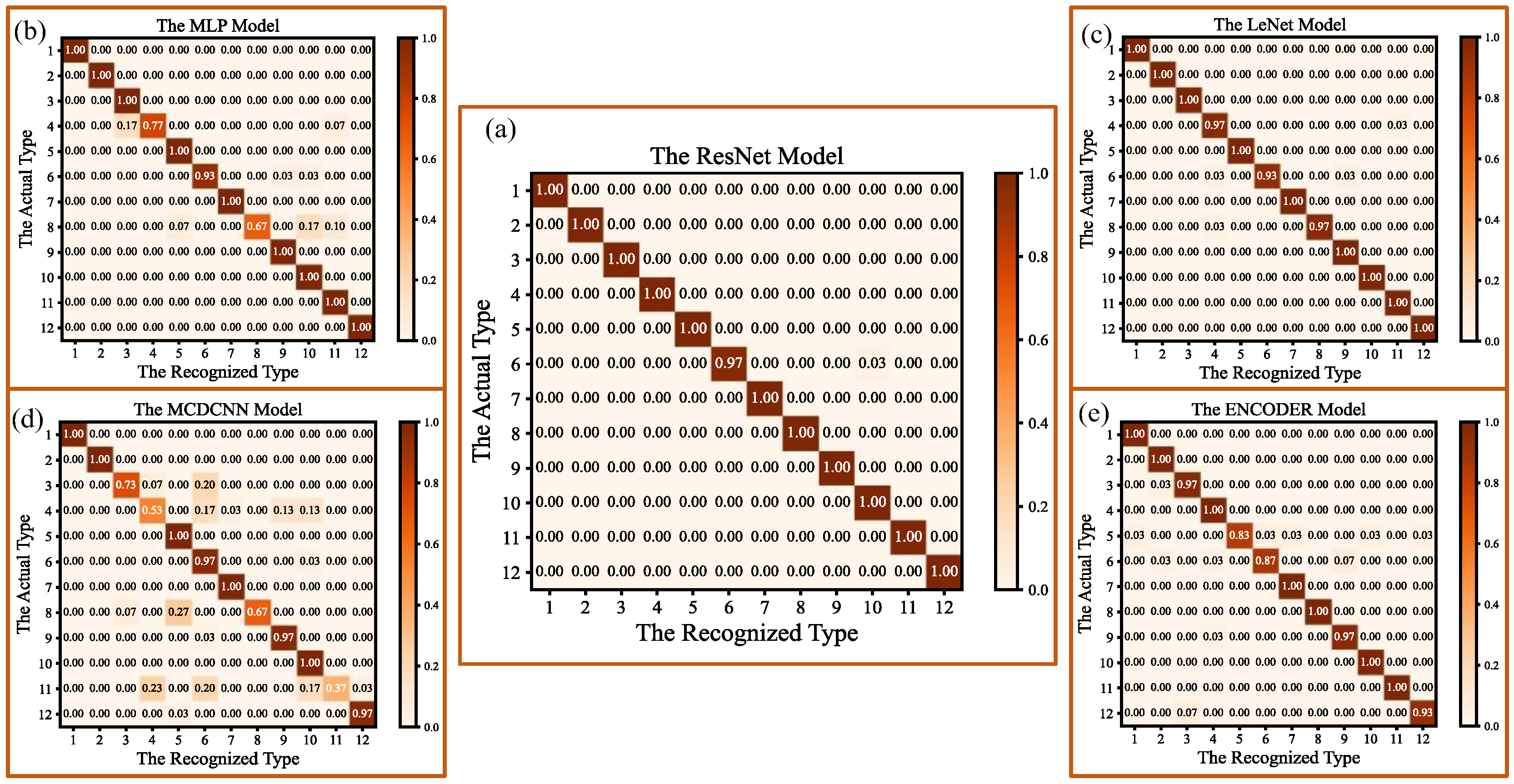
5.2. Type Recognition of Objects Based on the Five Models
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ozioko, O.; Navaraj, W.; Hersh, M.; Dahiya, R. Tacsac: A wearable haptic device with capacitive touch-sensing capability for tactile display. Sensors 2020, 20, 4780. [Google Scholar] [CrossRef] [PubMed]
- Moosavi, S.; Zafar, M.; Sanfilippo, F. A Review of the State-of-the-Art of Sensing and Actuation Technology for Robotic Grasping and Haptic Rendering. IEEE 2022, 5, 182–190. [Google Scholar]
- Li, P.; Su, N.; Wang, Z.; Qiu, J. A Ti3C2T x MXene-Based Energy-Harvesting Soft Actuator with Self-Powered Humidity Sensing and Real-Time Motion Tracking Capability. ACS Nano 2021, 15, 16811–16818. [Google Scholar] [CrossRef] [PubMed]
- Okunevich, I.; Trinitatova, D.; Kopanev, P.; Tsetserukou, D. MobileCharger: An autonomous mobile robot with inverted delta actuator for robust and safe robot charging. IEEE 2021, 6, 1–8. [Google Scholar]
- Veeralingam, S.; Praveen, S.; Vemula, M.; Badhulika, S. One-step synthesis of carbon-doped PPy nanoparticles interspersed in 3D porous melamine foam as a high-performance piezoresistive pressure, strain, and breath sensor. Mater. Chem. Front. 2022, 6, 570–579. [Google Scholar] [CrossRef]
- Veeralingam, S.; Gandrothula, A.; Badhulika, S. Tungsten Oxysulfide Nanoparticles interspersed Nylon based e-textile as a low cost, Wearable Multifunctional platform for ultra-sensitive tactile sensing and breath sensing applications. Mater. Res. Bull. 2022, 160, 112133–112144. [Google Scholar] [CrossRef]
- Tang, Y.; Liu, H.; Pan, J.; Zhang, Z.; Xu, Y.; Yao, N.; Zhang, L.; Tong, L. Optical micro/nanofiber-enabled compact tactile sensor for hardness discrimination. ACS Appl. Mater. Interfaces 2021, 13, 4560–4566. [Google Scholar] [CrossRef]
- Erukainure, F.; Parque, V.; Hassan, M.; FathEl-Bab, A.M.R. Design and experimental testing of a tactile sensor for self-compensation of contact error in soft tissue stiffness measurement. J. Mech. Sci. Technol. 2022, 36, 5309–5324. [Google Scholar] [CrossRef]
- Wang, L.; Li, Q.; Lam, J.; Wang, Z. Tactual recognition of soft objects from deformation cues. IEEE Rob. Autom. Lett. 2021, 7, 96–103. [Google Scholar] [CrossRef]
- Tsuji, S.; Kohama, T. Using a convolutional neural network to construct a pen-type tactile sensor system for roughness recognition. Sens. Actuators A 2019, 291, 7–12. [Google Scholar] [CrossRef]
- Huang, S.; Wu, H. Texture recognition based on perception data from a bionic tactile sensor. Sensors 2021, 21, 5224. [Google Scholar] [CrossRef] [PubMed]
- Shin, K.; Sim, M.; Choi, E.; Park, H.; Choi, J.; Cho, Y.; Sohn, J.; Cha, S.; Jang, J. Artificial tactile sensor structure for surface topography through sliding. IEEE/ASME Trans. Mechatron. 2018, 23, 2638–2649. [Google Scholar] [CrossRef]
- Wang, Y.; Lu, Y.; Mei, D.; Zhu, L. Liquid metal-based wearable tactile sensor for both temperature and contact force sensing. IEEE Sens. J. 2020, 21, 1694–1703. [Google Scholar] [CrossRef]
- Li, G.; Liu, S.; Wang, L.; Zhu, R. Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition. Sci. Rob. 2020, 5, 8134–8146. [Google Scholar] [CrossRef]
- Li, W.; Lin, C.; Rasheed, A.; Iranmanesh, E.; Zhou, Q.; Wang, K. A force and temperature sensor array based on 3-D field-coupled thin-film transistors for tactile intelligence. IEEE Trans. Electron Devices 2020, 67, 2890–2895. [Google Scholar] [CrossRef]
- Peng, Y.; Yang, N.; Xu, Q.; Dai, Y.; Wang, Z. Recent advances in flexible tactile sensors for intelligent systems. Sensors 2021, 21, 5392. [Google Scholar] [CrossRef] [PubMed]
- Byun, S.; Lee, S. Implementation of hand gesture recognition device applicable to smart watch based on flexible epidermal tactile sensor array. Micromachines 2019, 10, 692. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.; Hong, W.; Liu, L.; Wang, D.; Xiang, L.; Mai, Z.; Tang, G.; Shao, S.; Jin, C.; Hong, Q.; et al. Highly Sensitive and Wide-Range Flexible Bionic Tactile Sensors Inspired by the Octopus Sucker. ACS Appl. Nano Mater. 2022, 5, 11028–11036. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Liu, G.; Xu, W. Variable motion mapping to enhance stiffness discrimination and identification in robot hand teleoperation. Rob. Comput. Integr. Manuf. 2018, 51, 202–208. [Google Scholar] [CrossRef]
- Kaim, L.; Drewing, K. Exploratory strategies in haptic softness discrimination are tuned to achieve high levels of task performance. IEEE Trans. Haptic 2011, 4, 242–252. [Google Scholar] [CrossRef]
- Yuan, W.; Srinivasan, M.; Adelson, E. Estimating object hardness with a gelsight touch sensor. IEEE 2016, 1, 208–215. [Google Scholar]
- Drimus, A.; Kootstra, G.; Bilberg, A.; Kragic, D. Design of a flexible tactile sensor for classification of rigid and deformable objects. Robot. Auton. Syst. 2014, 62, 3–15. [Google Scholar] [CrossRef]
- Pastor, F.; Gandarias, J.; García-Cerezo, A.; Gómez-de-Gabriel, J. Using 3D convolutional neural networks for tactile object recognition with robotic palpation. Sensors 2019, 19, 5356. [Google Scholar] [CrossRef] [PubMed]
- Hui, W.; Li, H.; Chen, M. Robotic tactile recognition and adaptive grasping control based on CNN-LSTM. Chin. J. Sci. Instrum. 2019, 40, 211–218. [Google Scholar]
- Gandarias, J.; Garcia-Cerezo, A.; Gomez-de-Gabriel, J. CNN-based methods for object recognition with high-resolution tactile sensors. IEEE Sens. J. 2019, 19, 6872–6882. [Google Scholar] [CrossRef]
- Song, Y.; Li, M.; Wang, F.; Lv, S. Contact Pattern Recognition of a Flexible Tactile Sensor Based on the CNN-LSTM Fusion Algorithm. Micromachines 2022, 13, 1053. [Google Scholar] [CrossRef] [PubMed]
- Pohtongkam, S.; Srinonchat, J. Tactile Object Recognition for Humanoid Robots Using New Designed Piezoresistive Tactile Sensor and DCNN. Sensors 2021, 21, 6024. [Google Scholar] [CrossRef]
- Yan, Y.; Hu, Z.; Shen, Y.; Pan, J. Surface Texture Recognition by Deep Learning-Enhanced Tactile Sensing. Adv. Intell. Syst. 2022, 4, 2100076–2100083. [Google Scholar] [CrossRef]
- Luo, Y.; Tian, X.; Fan, J. Novel Flexible Resistive Sensors in the Age of Intelligence. Mater. Rep. 2020, 34, 1069–1079. [Google Scholar]
- Ren, Z.; Ren, G.; Wu, D. Deep Learning Based Feature Selection Algorithm for Small Targets Based on mRMR. Micromachines 2022, 13, 1765. [Google Scholar] [CrossRef]
- Wang, F.; Lv, S.; Song, Y.; Li, M.; Sun, N.; Zhang, Y.; Zhang, W. Perception and recognition of contact state for a novel tactile sensor based on Residual Networks. Chin. J. Sens. Actuators 2022, 35, 1404–1411. [Google Scholar]
- Eduok, U.; Faye, O.; Szpunar, J. Recent developments and applications of protective silicone coatings: A review of PDMS functional materials. Prog. Org. Coat. 2017, 111, 124–163. [Google Scholar] [CrossRef]
- Lu, S.; Ma, J.; Ma, K.; Wang, S.; Yang, X.; Wang, X.; Tang, H. Low-cost, highly sensitive and stable pressure sensor based on glass fiber surfacing mat coated with graphene. Funct. Mater. Lett. 2020, 13, 2051002–2051010. [Google Scholar] [CrossRef]
- Lu, Y.; Yu, X.; Tian, M.; Qu, L. Graphene/Polydimethylsiloxane Modified Three-Dimensional Nonwoven Structure Piezoresistive Pressure Sensor. Chin. J. Sens. Actuators 2018, 31, 1337–1340. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. IEEE 2016, 1, 770–778. [Google Scholar]
- Li, Z.; Xu, M.; Yang, X. Multi-Label Fundus Image Classification Using Attention Mechanisms and Feature Fusion. Micromachines 2022, 13, 947. [Google Scholar] [CrossRef]
- Wang, Z.; Yan, W.; Oates, T. Time series classification from scratch with deep neural networks: A strong baseline. IEEE 2017, 1, 1578–1585. [Google Scholar]
- Wu, Z.; Shen, C.; Van Den Hengel, A. Wider or deeper: Revisiting the resnet model for visual recognition. Pattern Recognit. 2019, 90, 119–133. [Google Scholar] [CrossRef]
- Qiu, X. Neural Network and Deep Learning; China Machine Press: Beijing, China, 2020; pp. 45–46. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Hardness Value | Hardness Category | Object | Hardness Value | Hardness Category |
|---|---|---|---|---|---|
| Sponge | 13HA | Very soft | Blue plastic bottle | 67HA | Hard |
| Pillow | 15HA | Very soft | Glue set | 62HA | Hard |
| Doll | 11HA | Very soft | A roll of garbage bags | 58HA | Hard |
| Article jelly | 32HA | Soft | Rubber | 80HA | Very hard |
| Bread | 34HA | Soft | Plastic bottle | 78HA | Very hard |
| Red date | 27HA | Soft | Spectacle case | 82HA | Very hard |
| Model | Layers | Conv | Feature | Pooling | Activate |
|---|---|---|---|---|---|
| MLP | 4 | 0 | FC | None | ReLU |
| LeNet | 4 | 2 | FC | Max | ReLU |
| MCDCNN | 4 | 2 | FC | Max | ReLU |
| ENCODER | 5 | 3 | Att | Max | PReLU |
| ResNet | 4 | 3 | GAP | Avg | ReLU |
| Object | Label Number | Object | Label Number | Object | Label Number |
|---|---|---|---|---|---|
| Sponge | 1 | Bread | 5 | A roll of garbage bags | 9 |
| Pillow | 2 | Red date | 6 | Rubber | 10 |
| Doll | 3 | Blue plastic bottle | 7 | Plastic bottle | 11 |
| Article jelly | 4 | Glue set | 8 | Spectacle case | 12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Y.; Lv, S.; Wang, F.; Li, M. Hardness-and-Type Recognition of Different Objects Based on a Novel Porous Graphene Flexible Tactile Sensor Array. Micromachines 2023, 14, 217. https://doi.org/10.3390/mi14010217
Song Y, Lv S, Wang F, Li M. Hardness-and-Type Recognition of Different Objects Based on a Novel Porous Graphene Flexible Tactile Sensor Array. Micromachines. 2023; 14(1):217. https://doi.org/10.3390/mi14010217
Chicago/Turabian StyleSong, Yang, Shanna Lv, Feilu Wang, and Mingkun Li. 2023. "Hardness-and-Type Recognition of Different Objects Based on a Novel Porous Graphene Flexible Tactile Sensor Array" Micromachines 14, no. 1: 217. https://doi.org/10.3390/mi14010217