
Effects of Side Profile on Acoustic Streaming by Oscillating Microstructures in Channel

Abstract
:1. Introduction
2. Numerical Methods
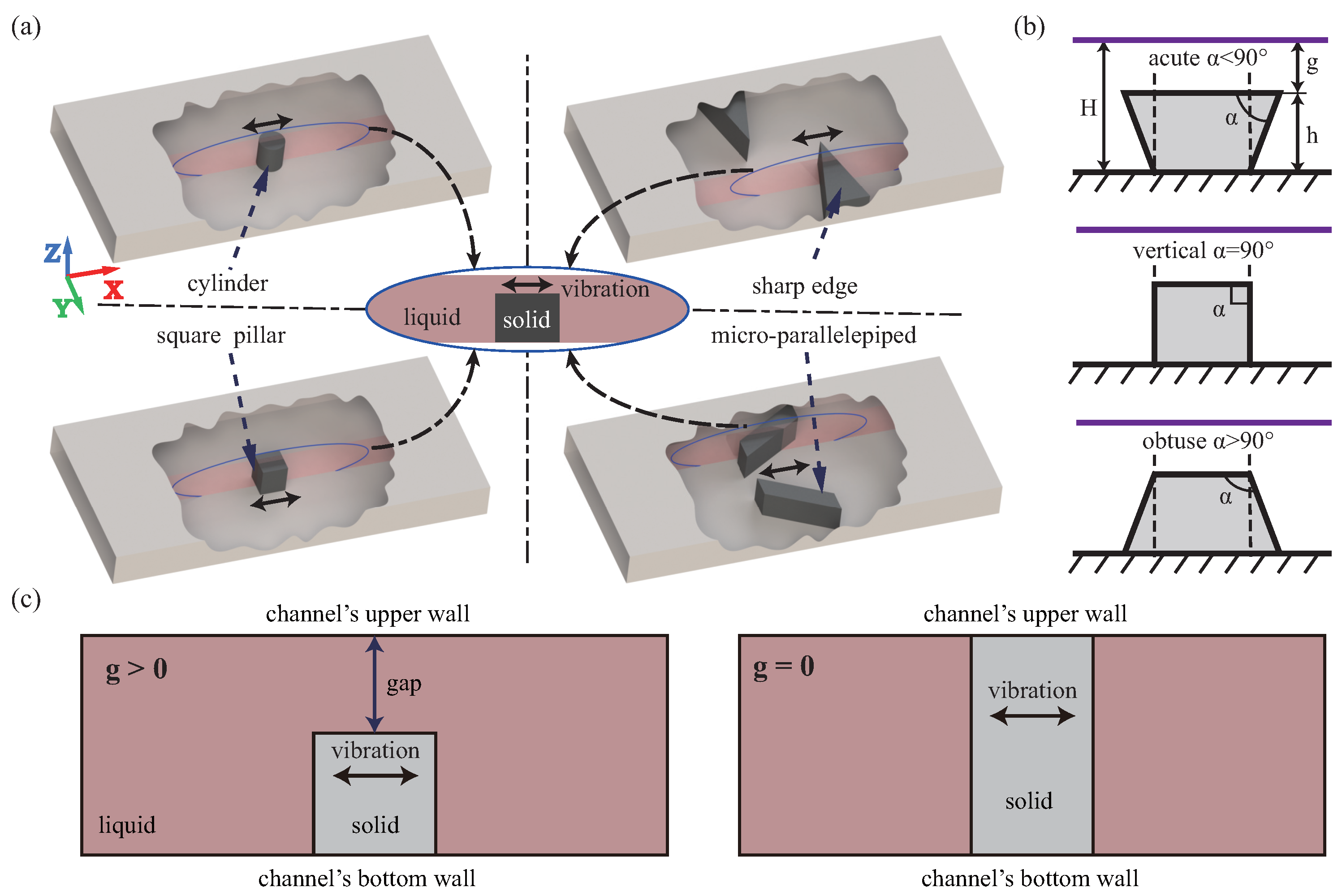
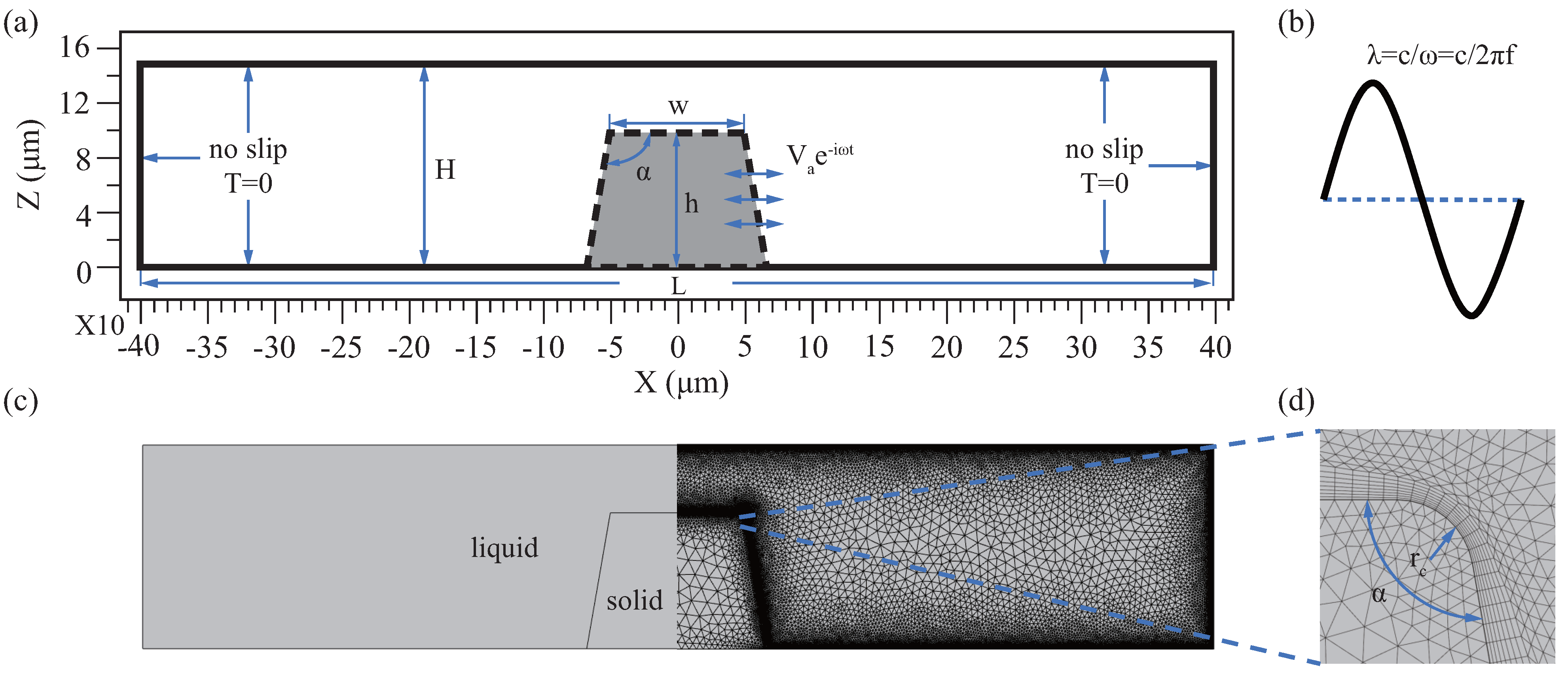
2.1. Model Geometry and Numerical Scheme
2.2. Governing Equations and Boundary Conditions
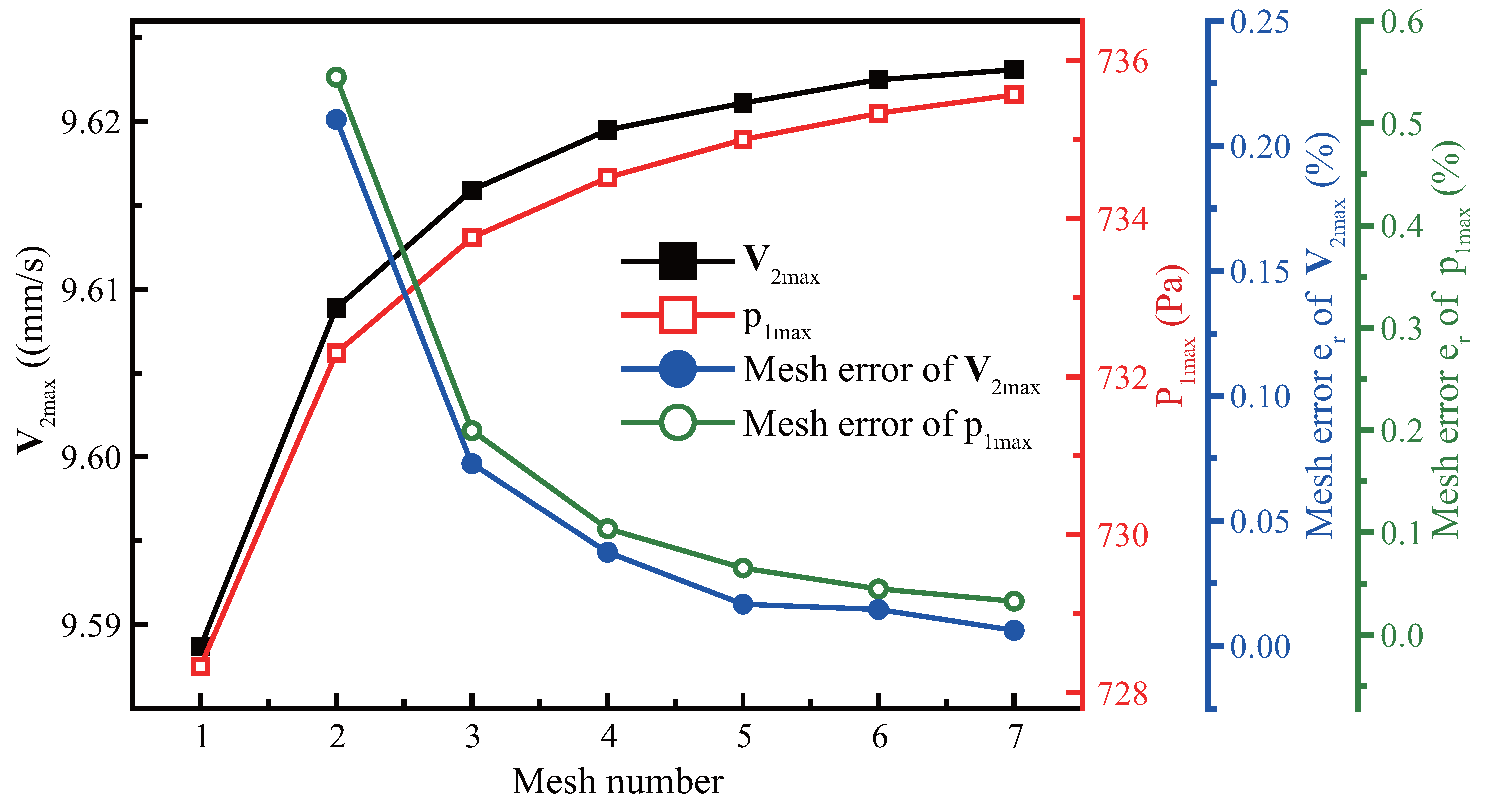
2.3. Mesh Independence Test
3. Results and Discussion
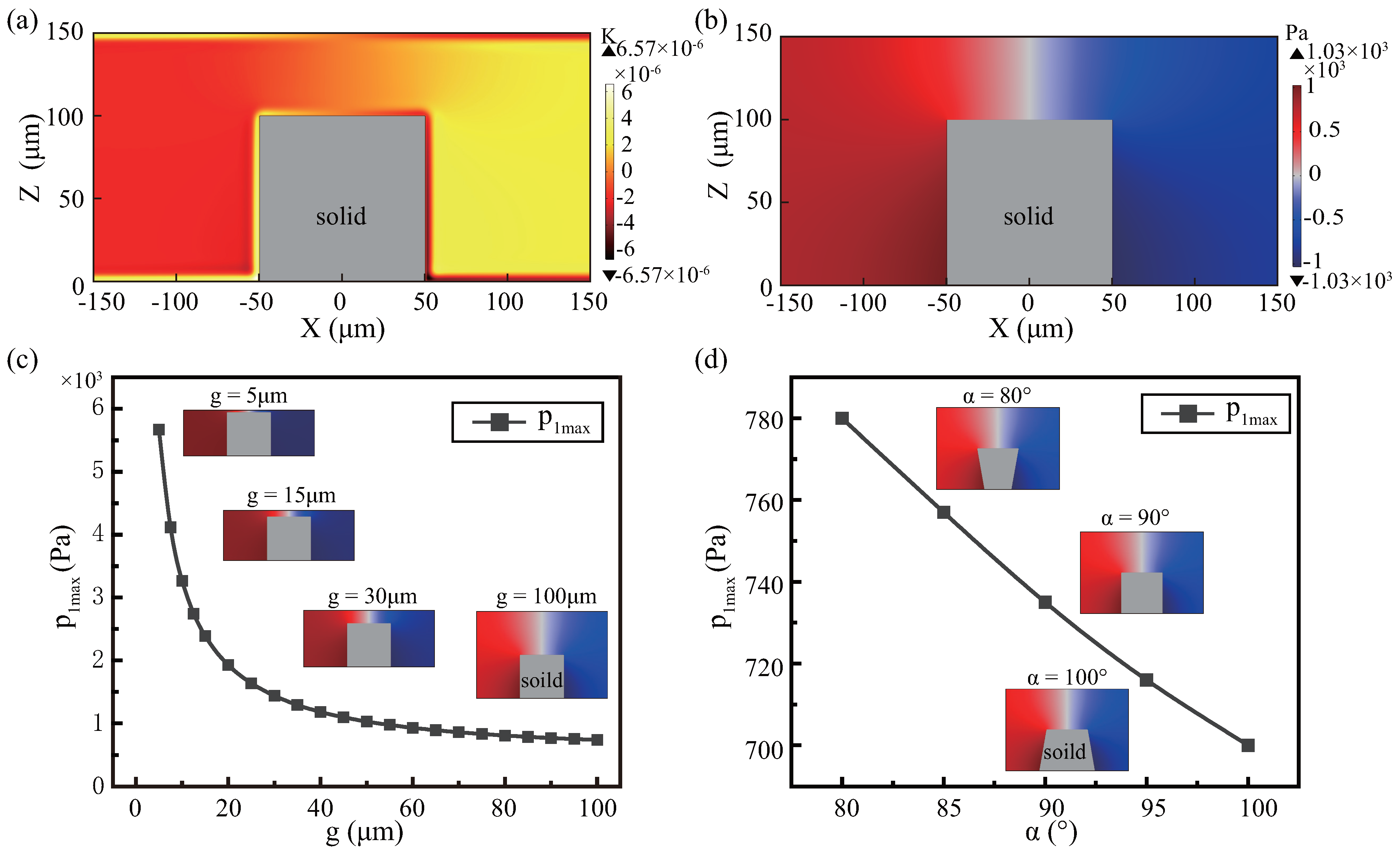
3.1. The Effect of Side Profile Parameters
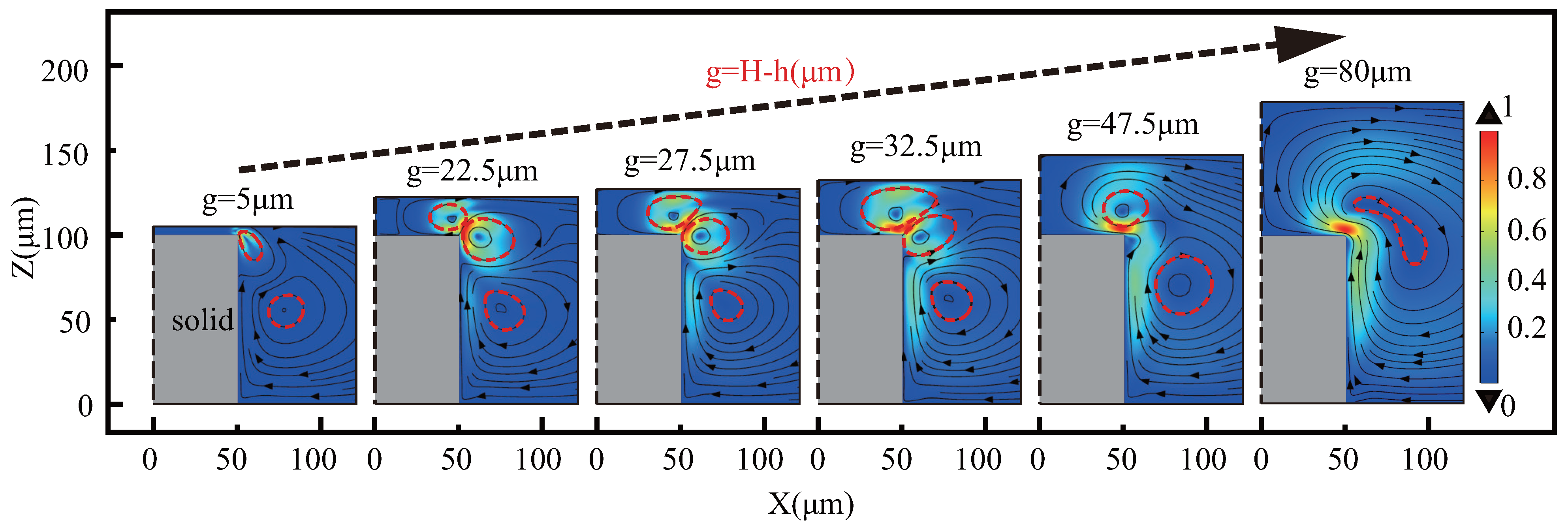
3.1.1. The Effect of Gap
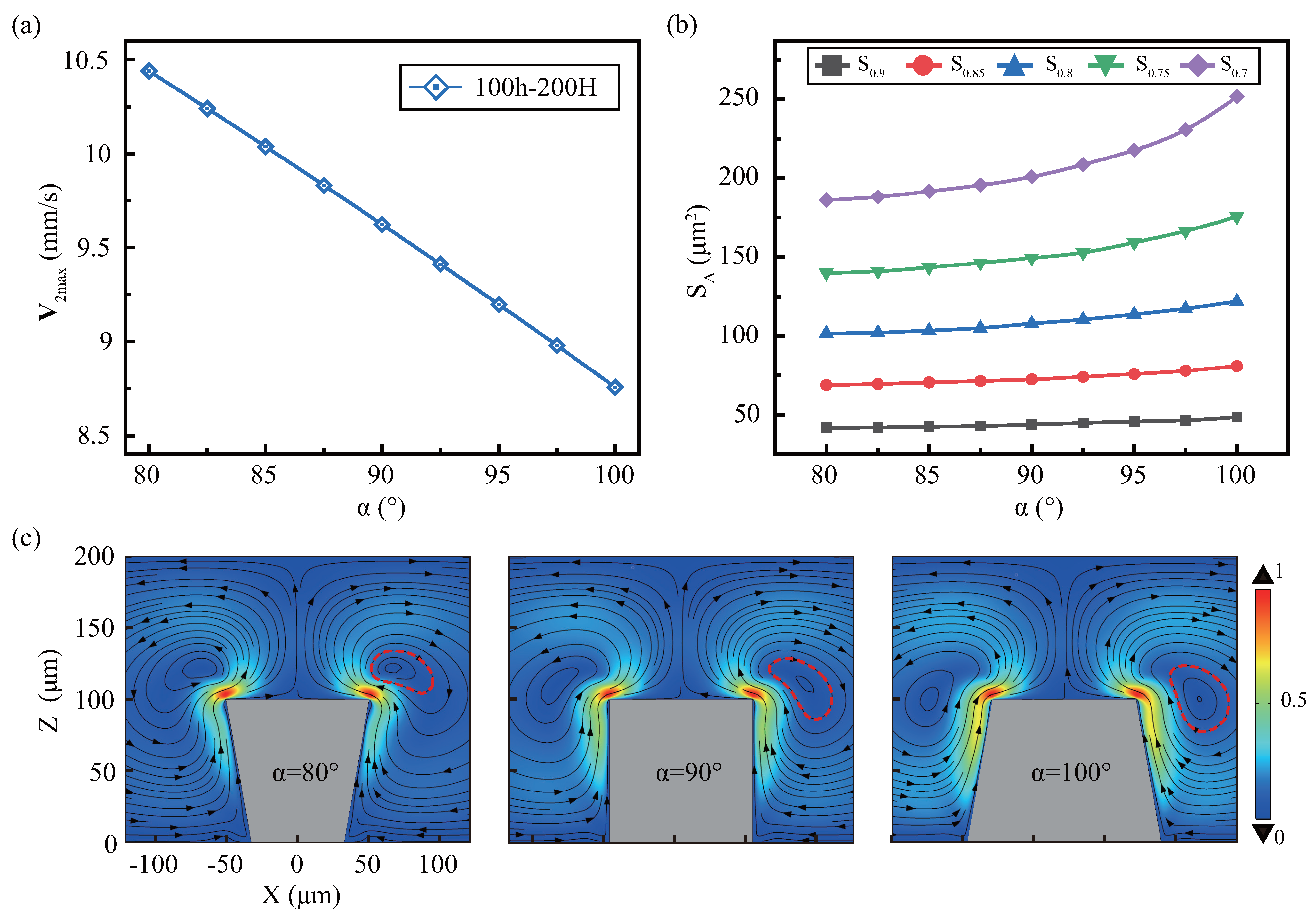
3.1.2. The Effect of Sidewall Angle
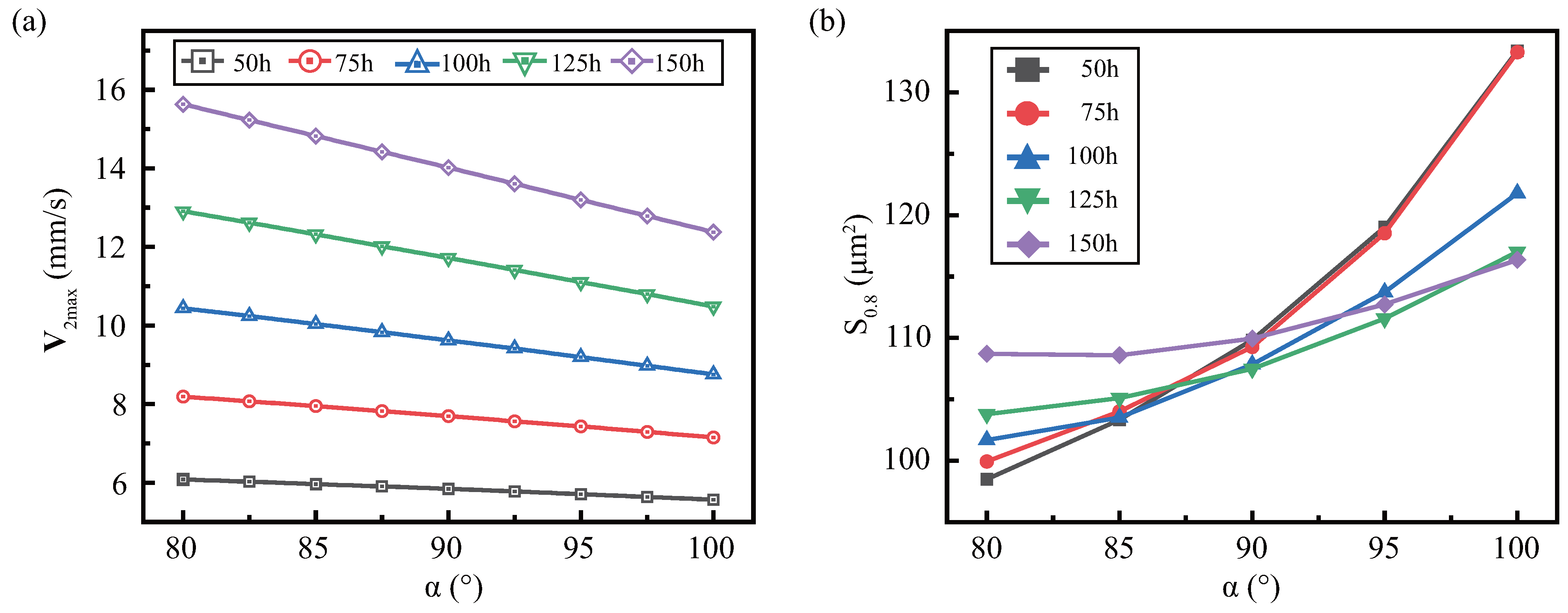
3.1.3. The Effect of Height
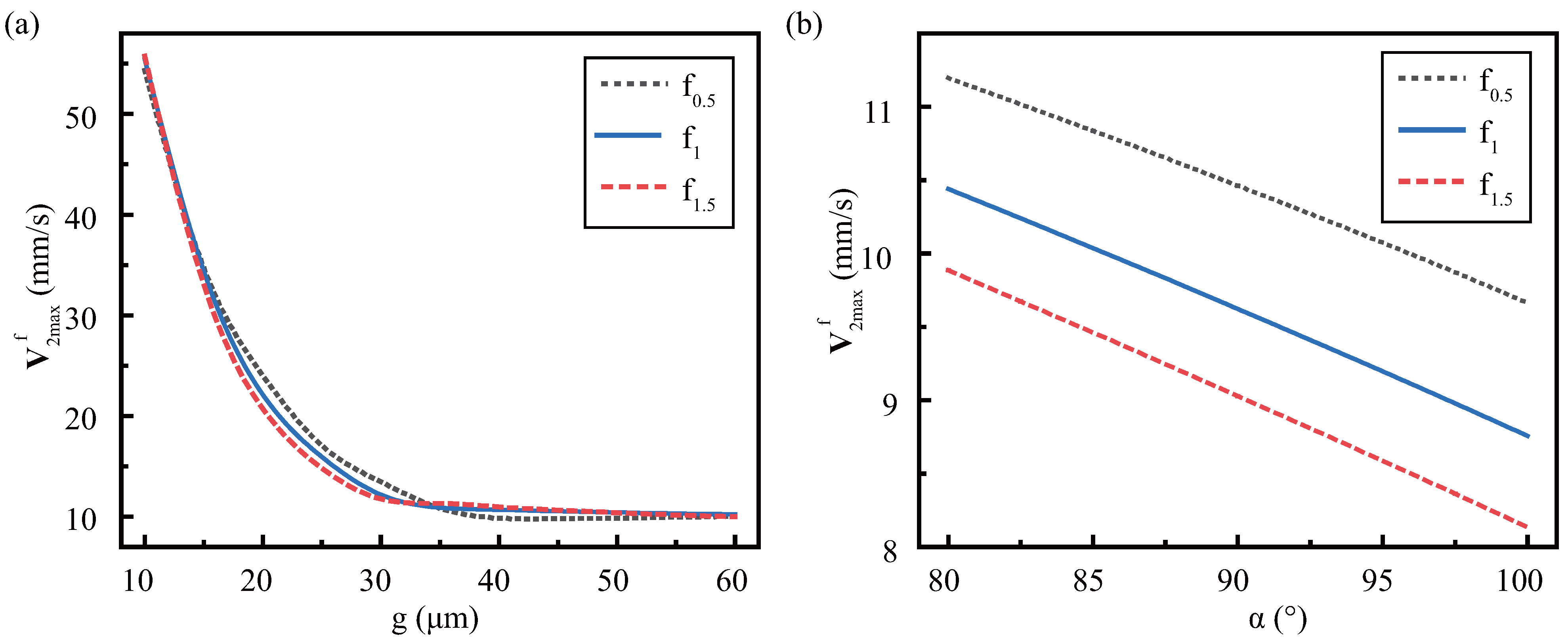
3.2. The Effect of Boundary Layer Thickness Parameters
3.2.1. The Effect of Frequency
3.2.2. Influence of Viscosity
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Supplementary of Simulation
Appendix A.1. Numerical Scheme
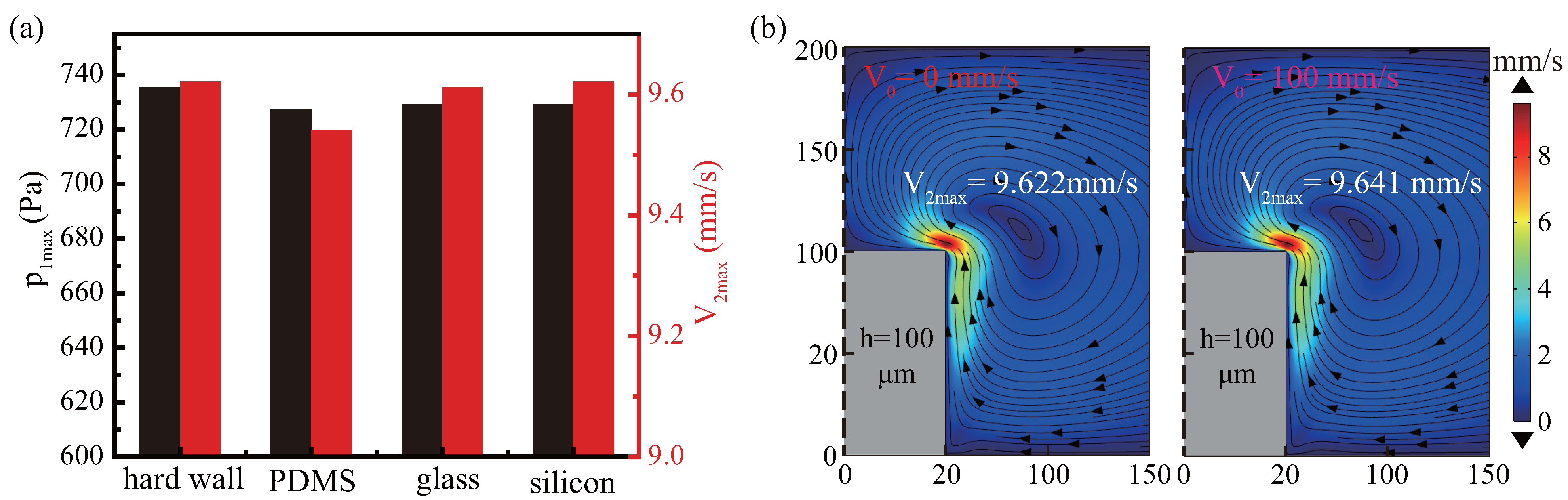
Appendix A.2. Simplification of Boundary Conditions

Appendix A.3. Mesh Size in Fluid Domain

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Bulk Mesh | Boundary Mesh |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 |
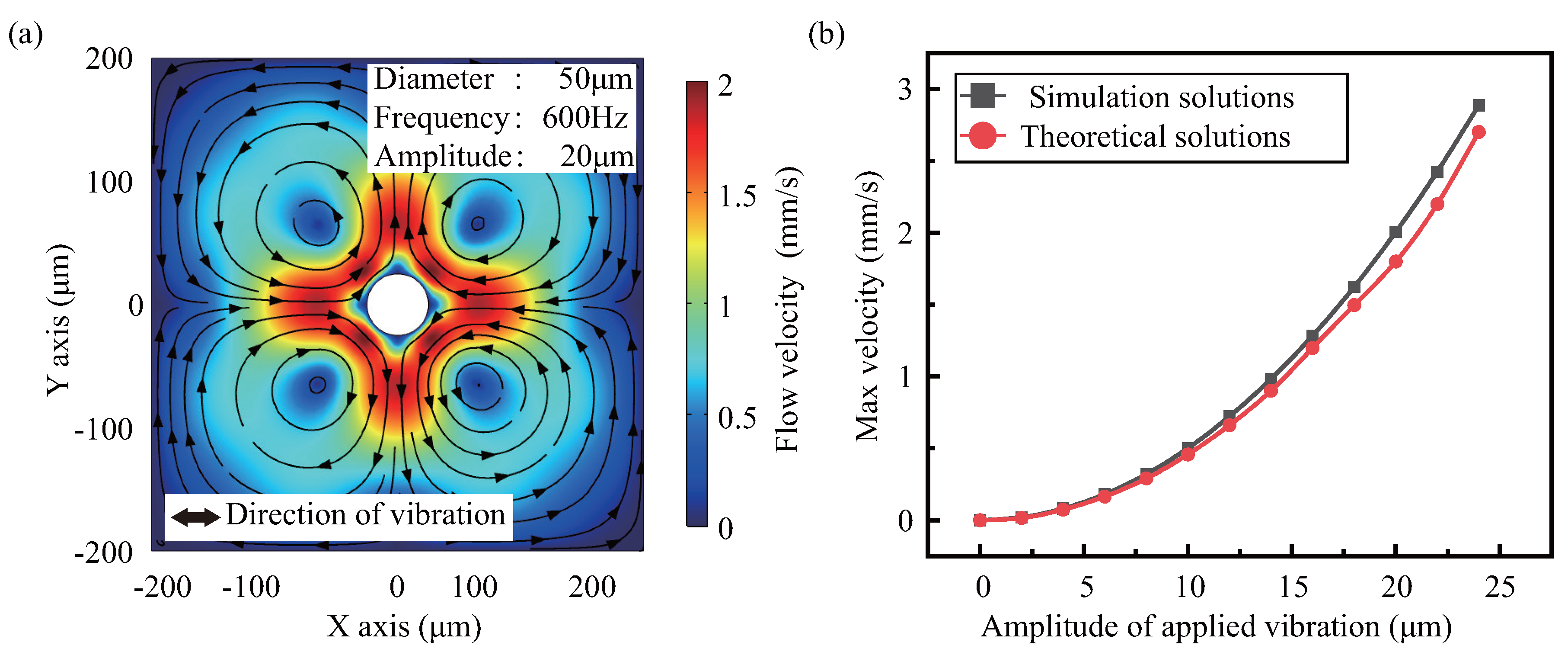
Appendix A.4. Numerical Simulation vs. Theoretical Calculation

Appendix B. Results Supplement
Appendix B.1. First Order Acoustic Field

Appendix B.2. Second Order Streaming Field


References
- Wu, J. Acoustic streaming and its applications. Fluids 2018, 3, 108. [Google Scholar] [CrossRef]
- Luo, X.; Cao, J.; Gong, H.; Yan, H.; He, L. Phase separation technology based on ultrasonic standing waves: A review. Ultrason. Sonochem. 2018, 48, 287–298. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Ozcelik, A.; Bojanala, N.; Nama, N.; Upadhyay, A.; Chen, Y.; Hanna-Rose, W.; Huang, T.J. Rotational manipulation of single cells and organisms using acoustic waves. Nat. Commun. 2016, 7, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Collins, D.J.; Khoo, B.L.; Ma, Z.; Winkler, A.; Weser, R.; Schmidt, H.; Han, J.; Ai, Y. Selective particle and cell capture in a continuous flow using micro-vortex acoustic streaming. Lab Chip 2017, 17, 1769–1777. [Google Scholar] [CrossRef]
- Ozcelik, A.; Nama, N.; Huang, P.H.; Kaynak, M.; McReynolds, M.R.; Hanna-Rose, W.; Huang, T.J. Acoustofluidic rotational manipulation of cells and organisms using oscillating solid structures. Small 2016, 12, 5120–5125. [Google Scholar] [CrossRef]
- Ozcelik, A.; Rufo, J.; Guo, F.; Gu, Y.; Li, P.; Lata, J.; Huang, T.J. Acoustic tweezers for the life sciences. Nat. Methods 2018, 15, 1021–1028. [Google Scholar] [CrossRef]
- Zhang, H.; Tang, Z.; Wang, Z.; Pan, S.; Han, Z.; Sun, C.; Zhang, M.; Duan, X.; Pang, W. Acoustic streaming and microparticle enrichment within a microliter droplet using a Lamb-wave resonator array. Phys. Rev. Appl. 2018, 9, 064011. [Google Scholar] [CrossRef]
- Cao, H.X.; Jung, D.; Lee, H.S.; Go, G.; Nan, M.; Choi, E.; Kim, C.S.; Park, J.O.; Kang, B. Micromotor Manipulation Using Ultrasonic Active Traveling Waves. Micromachines 2021, 12, 192. [Google Scholar] [CrossRef]
- Liu, G.; Lei, J.; Cheng, F.; Li, K.; Ji, X.; Huang, Z.; Guo, Z. Ultrasonic particle manipulation in glass capillaries: A concise review. Micromachines 2021, 12, 876. [Google Scholar] [CrossRef] [PubMed]
- Lei, J. Formation of inverse Chladni patterns in liquids at microscale: Roles of acoustic radiation and streaming-induced drag forces. Microfluid. Nanofluidics 2017, 21, 50.1–50.15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tang, Q.; Liu, P.; Guo, X.; Zhou, S.; Dong, Y. 2D acoustofluidic patterns in an ultrasonic chamber modulated by phononic crystal structures. Microfluid. Nanofluidics 2020, 24, 91. [Google Scholar] [CrossRef]
- Tang, Q.; Liu, P.; Tang, S. Rotational manipulation of massive particles in a 2D acoustofluidic chamber constituted by multiple nonlinear vibration sources. Chin. Phys. B 2022, 31, 12. [Google Scholar] [CrossRef]
- Takatori, S.C.; De Dier, R.; Vermant, J.; Brady, J.F. Acoustic trapping of active matter. Nat. Commun. 2016, 7, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Endaylalu, S.A.; Tien, W.H. A Numerical Investigation of the Mixing Performance in a Y-Junction Microchannel Induced by Acoustic Streaming. Micromachines 2022, 13, 338. [Google Scholar] [CrossRef] [PubMed]
- Huang, P.H.; Nama, N.; Mao, Z.; Li, P.; Rufo, J.; Chen, Y.; Xie, Y.; Wei, C.H.; Wang, L.; Huang, T.J. A reliable and programmable acoustofluidic pump powered by oscillating sharp-edge structures. Lab Chip 2014, 14, 4319–4323. [Google Scholar] [CrossRef] [PubMed]
- Tang, Q.; Liu, P.; Hu, J. Analyses of acoustofluidic field in ultrasonic needle-liquid-substrate system for microVnanoscale material concentration. Microfluid. Nanofluidics 2018, 22, 46.1–46.11. [Google Scholar] [CrossRef]
- Li, F.; Xia, X.; Deng, Z.; Lei, J.; Shen, Y.; Lin, Q.; Zhou, W.; Meng, L.; Wu, J.; Cai, F.; et al. Ultrafast Rayleigh-like streaming in a sub-wavelength slit between two phononic crystal plates. J. Appl. Phys. 2019, 125, 134903. [Google Scholar] [CrossRef]
- Wiklund, M.; Green, R.; Ohlin, M. Acoustofluidics 14: Applications of acoustic streaming in microfluidic devices. Lab Chip 2012, 12, 2438–2451. [Google Scholar] [CrossRef]
- Laubli, N.F.; Gerlt, M.S.; Wuthrich, A.; Lewis, R.T.M.; Shamsudhin, N.; Kutay, U.; Ahmed, D.; Dual, J.; Nelson, B.J. Embedded microbubbles for acoustic manipulation of single cells and microfluidic applications. Anal. Chem. 2021, 93, 9760–9770. [Google Scholar] [CrossRef]
- Ahmed, D.; Mao, X.; Juluri, B.K.; Huang, T.J. A fast microfluidic mixer based on acoustically driven sidewall-trapped microbubbles. Microfluid. Nanofluidics 2009, 7, 727–731. [Google Scholar] [CrossRef]
- Volk, A.; Rossi, M.; Kähler, C.J.; Hilgenfeldt, S.; Marin, A. Growth control of sessile microbubbles in PDMS devices. Lab Chip 2015, 15, 4607–4613. [Google Scholar] [CrossRef] [PubMed]
- Belling, J.N.; Heidenreich, L.K.; Tian, Z.; Mendoza, A.M.; Chiou, T.T.; Gong, Y.; Chen, N.Y.; Young, T.D.; Wattanatorn, N.; Park, J.H.; et al. Acoustofluidic sonoporation for gene delivery to human hematopoietic stem and progenitor cells. Proc. Natl. Acad. Sci. USA 2020, 117, 10976–10982. [Google Scholar] [CrossRef]
- Rodamporn, S.; Harris, N.; Beeby, S.P.; Boltryk, R.J.; Sanchez-Eisner, T. HeLa cell transfection using a novel sonoporation system. IEEE Trans. Biomed. Eng. 2010, 58, 927–934. [Google Scholar] [CrossRef] [PubMed]
- Hayakawa, T.; Sakuma, S.; Arai, F. On-chip 3D rotation of oocyte based on a vibration-induced local whirling flow. Microsystems Nanoeng. 2015, 1, 1–9. [Google Scholar] [CrossRef]
- Hayakawa, T.; Sakuma, S.; Fukuhara, T.; Yokoyama, Y.; Arai, F. A single cell extraction chip using vibration-induced whirling flow and a thermo-responsive gel pattern. Micromachines 2014, 5, 681–696. [Google Scholar] [CrossRef]
- Feng, L.; Song, B.; Zhang, D.; Jiang, Y.; Arai, F. On-chip tunable cell rotation using acoustically oscillating asymmetrical microstructures. Micromachines 2018, 9, 596. [Google Scholar] [CrossRef]
- Huang, P.H.; Xie, Y.; Ahmed, D.; Rufo, J.; Nama, N.; Chen, Y.; Chan, C.Y.; Huang, T.J. An acoustofluidic micromixer based on oscillating sidewall sharp-edges. Lab Chip 2013, 13, 3847–3852. [Google Scholar] [CrossRef]
- Zhao, S.K.; Hu, X.J.; Zhu, J.M.; Luo, Z.Y.; Liang, L.; Yang, D.Y.; Chen, Y.L.; Chen, L.F.; Zheng, Y.J.; Hu, Q.H.; et al. On-chip rapid drug screening of leukemia cells by acoustic streaming. Lab Chip 2021, 21, 4005–4015. [Google Scholar] [CrossRef]
- Lu, X.; Martin, A.; Soto, F.; Angsantikul, P.; Li, J.; Chen, C.; Liang, Y.; Hu, J.; Zhang, L.; Wang, J. Parallel label-free isolation of cancer cells using arrays of acoustic microstreaming traps. Adv. Mater. Technol. 2019, 4, 1800374. [Google Scholar] [CrossRef]
- Shen, H.; Zhao, K.; Wang, Z.; Xu, X.; Lu, J.; Liu, W.; Lu, X. Local Acoustic Fields Powered Assembly of Microparticles and Applications. Micromachines 2019, 10, 882. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Yang, F.; Zhao, W. Microelectrokinetic turbulence in microfluidics at low Reynolds number. Phys. Rev. E 2016, 93, 013106. [Google Scholar] [CrossRef] [PubMed]
- Lu, X.; Zhao, K.; Peng, H.; Li, H.; Liu, W. Local enhanced microstreaming for controllable high-speed acoustic rotary microsystems. Phys. Rev. Appl. 2019, 11, 044064. [Google Scholar] [CrossRef]
- Lieu, V.H.; House, T.A.; Schwartz, D.T. Hydrodynamic tweezers: Impact of design geometry on flow and microparticle trapping. Anal. Chem. 2012, 84, 1963–1968. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, X.; Brunet, P.; Costalonga, M.; Royon, L. Acoustic streaming near a sharp structure and its mixing performance characterization. Microfluid. Nanofluidics 2019, 23, 1–15. [Google Scholar] [CrossRef]
- Doinikov, A.A.; Gerlt, M.S.; Pavlic, A.; Dual, J. Acoustic streaming produced by sharp-edge structures in microfluidic devices. Microfluid. Nanofluidics 2020, 24, 1–13. [Google Scholar] [CrossRef]
- Mohanty, S.; Siciliani de Cumis, U.; Solsona, M.; Misra, S. Bi-directional transportation of micro-agents induced by symmetry-broken acoustic streaming. AIP Adv. 2019, 9, 035352. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, X.; Royon, L.; Brunet, P. Unveiling of the mechanisms of acoustic streaming induced by sharp edges. Phys. Rev. E 2020, 102, 043110. [Google Scholar] [CrossRef] [PubMed]
- Lei, J.; Hill, M.; de León Albarrán, C.P.; Glynne-Jones, P. Effects of micron scale surface profiles on acoustic streaming. Microfluid. Nanofluidics 2018, 22, 1–14. [Google Scholar] [CrossRef]
- Kaneko, K.; Osawa, T.; Kametani, Y.; Hayakawa, T.; Hasegawa, Y.; Suzuki, H. Numerical and experimental analyses of three-dimensional unsteady flow around a micro-pillar subjected to rotational vibration. Micromachines 2018, 9, 668. [Google Scholar] [CrossRef]
- Yang, R.; Wang, W. A numerical and experimental study on gap compensation and wavelength selection in UV-lithography of ultra-high aspect ratio SU-8 microstructures. Sens. Actuators B Chem. 2005, 110, 279–288. [Google Scholar] [CrossRef]
- Lei, J.; Glynne-Jones, P.; Hill, M. Comparing methods for the modelling of boundary-driven streaming in acoustofluidic devices. Microfluid. Nanofluidics 2017, 21, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Holmes, M.; Parker, N.; Povey, M. Temperature dependence of bulk viscosity in water using acoustic spectroscopy. J. Phys. Conf. Ser. 2011, 269, 012011. [Google Scholar] [CrossRef]
- Muller, P.B.; Barnkob, R.; Jensen, M.J.H.; Bruus, H. A numerical study of microparticle acoustophoresis driven by acoustic radiation forces and streaming-induced drag forces. Lab Chip 2012, 12, 4617–4627. [Google Scholar] [CrossRef] [PubMed]
- Vernekar, V.N.; Cullen, D.K.; Fogleman, N.; Choi, Y.; García, A.J.; Allen, M.G.; Brewer, G.J.; LaPlaca, M.C. SU-8 2000 rendered cytocompatible for neuronal bioMEMS applications. J. Biomed. Mater. Res. Part A Off. J. Soc. Biomater. Jpn. Soc. Biomater. Aust. Soc. Biomater. Korean Soc. Biomater. 2009, 89, 138–151. [Google Scholar] [CrossRef]
- Ribeiro, J.; Minas, G.; Turmezei, P.; Wolffenbuttel, R.; Correia, J. A SU-8 fluidic microsystem for biological fluids analysis. Sens. Actuators A Phys. 2005, 123, 77–81. [Google Scholar] [CrossRef]
- Nemani, K.V.; Moodie, K.L.; Brennick, J.B.; Su, A.; Gimi, B. In vitro and in vivo evaluation of SU-8 biocompatibility. Mater. Sci. Eng. C 2013, 33, 4453–4459. [Google Scholar] [CrossRef]
- Anderson, J.D. Governing equations of fluid dynamics. In Computational Fluid Dynamics; Springer: Berlin/Heidelberg, Germany, 1992; pp. 15–51. [Google Scholar] [CrossRef]
- Liu, C. New ideas on governing equations of fluid dynamics. J. Hydrodyn. 2021, 33, 861–866. [Google Scholar] [CrossRef]
- Muller, P.B. Acoustofluidics in Microsystems: Investigation of Acoustic Streaming. Master’s Thesis, Department of Micro-and Nanotechnology, DTU Nanotech, Lyngby, Denmark, 2012; pp. 10–16. [Google Scholar]
- Karlsen, J.T.; Bruus, H. Forces acting on a small particle in an acoustical field in a thermoviscous fluid. Phys. Rev. E 2015, 92, 043010. [Google Scholar] [CrossRef]
- Hintermüller, M.A.; Reichel, E.K.; Jakoby, B. The influence of a background flow on acoustic streaming. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Bruus, H.; Laurell, T.; Lenshof, A. Perturbation theory and ultrasound resonances. In Microscale Acoustofluidics; Royal Society of Chemistry: London, UK, 2014; pp. 29–45. [Google Scholar] [CrossRef]
- Hayakawa, T.; Akita, Y.; Arai, F. Parallel trapping of single motile cells based on vibration-induced flow. Microfluid. Nanofluidics 2018, 22, 1–9. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, X.; Royon, L.; Brunet, P. Acoustic streaming generated by sharp edges: The coupled influences of liquid viscosity and acoustic frequency. Micromachines 2020, 11, 607. [Google Scholar] [CrossRef]










| Parameter | Value | Units |
|---|---|---|
| Density, | 997 | kg/m3 |
| Speed of sound, | 1496.73 | m/s |
| Dynamic shear viscosity, | 0.89 | mPas |
| Bulk viscosity, | 2.47 | mPas |
| Thermal conductivity, | 0.6075 | W/m·K |
| Specific heat capacity, | 4181.5 | J/kg·K |
| Thermal expansion coefficient, | 2.57 × 10−4 | 1/K |
| Compressibility coefficient, | 448 | T/Pa |
| Gap, g | 5∼100 | m |
| Height of the channel, h | 50/75/100/125/150 | m |
| Span of the channel, L | 800 | m |
| Height of the microstructure, H | m | |
| Span of the microstructure, w | 100 | m |
| Profile angle of microstructure, | 80∼100 | ° |
| Round radius of apex, | 0.05 | m |
| Forcing frequency, f | 5∼15 | kHz |
| Displacement amplitude, | 1 | m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, L.; Dang, H.; Zhu, R.; Liu, Y.; You, H. Effects of Side Profile on Acoustic Streaming by Oscillating Microstructures in Channel. Micromachines 2022, 13, 1439. https://doi.org/10.3390/mi13091439
Lin L, Dang H, Zhu R, Liu Y, You H. Effects of Side Profile on Acoustic Streaming by Oscillating Microstructures in Channel. Micromachines. 2022; 13(9):1439. https://doi.org/10.3390/mi13091439
Chicago/Turabian StyleLin, Lin, Haojie Dang, Rongxin Zhu, Ying Liu, and Hui You. 2022. "Effects of Side Profile on Acoustic Streaming by Oscillating Microstructures in Channel" Micromachines 13, no. 9: 1439. https://doi.org/10.3390/mi13091439