
Mixing Performance of a Planar Asymmetric Contraction-and-Expansion Micromixer

Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimension | Categories | Characteristics | Re | Mixing Efficiency (Max.) | Mixing Efficiency (Min.) | Ref. |
|---|---|---|---|---|---|---|
| 2D | Lamination | T-shaped | 100–1400 | ~100% f (Re = 400–500) | [17] c | |
| T-shaped | 0.5–550 | ~98% f (Re > 300) | 10% (Re = 3–35) | [18] a | ||
| Modified 2D Tesla | 0.1–10 | ~ 90% f (Re = 5–10) | [23] c | |||
| Modified 2D Tesla | 0.05–40 | 80–90% d (Re = 0.05, Re = 40) | < 40% (Re = 2) | [24] b | ||
| Asymmetric split-and-recombine (P-SAR) | 1–100 | 86% d (Re = 80) | < 20% (Re = 10) | [36] c | ||
| Serpentine | Curved, square-wave, and zigzag | 0.267–267 | 90% d (Re = 267) | 10% (Re = 5–15) | [19] b | |
| Curved, square-wave, and zigzag | 0.1–100 | 95% e (Re = 100) | 40–50% (Re = 1) | [20] c | ||
| Zigzag | 0.309–309 | 90% e (Re > 100) | 40% (Re = 30) | [21] a | ||
| Ellipse-curved | 0.1–100 | 90% d (Re = 0.1, Re > 80) | 25% (Re = 1–10) | [22] c | ||
| Logarithmic spiral | 1–70 | 80–86% f (Re = 1, Re = 67) | 53% (Re = 15) | [37] c | ||
| Obstacle | Triangle baffles | 0.1–500 | 86% d (Re = 0.1) | 58% (Re = 500) | [34] c | |
| Parallelogram | 0.29 | 80% d (Re = 0.29) | [35] c | |||
| 3D | Lamination | 3D Tesla | 0.1–100 | 95% e (Re = 0.1–100) | [25] c | |
| Sifted trapezoidal blades | 0.5–100 | 80–95% e (Re = 0.5–100) | [30] c | |||
| Obstacle | Staggered herringbone (SHM) | 0.2–90 | 90% d (Re = 0.2–90) | [31] a | ||
| Staggered herringbone (SHM) | 0.3–90 | 90% d (Re = 0.3–90) | [32] a | |||
| Barrier-embedded (BEM) | 0.2–2 | 80–90% f (Re = 0.2–2) | [33] a |
2. Materials and Methods
2.1. Computational Analysis
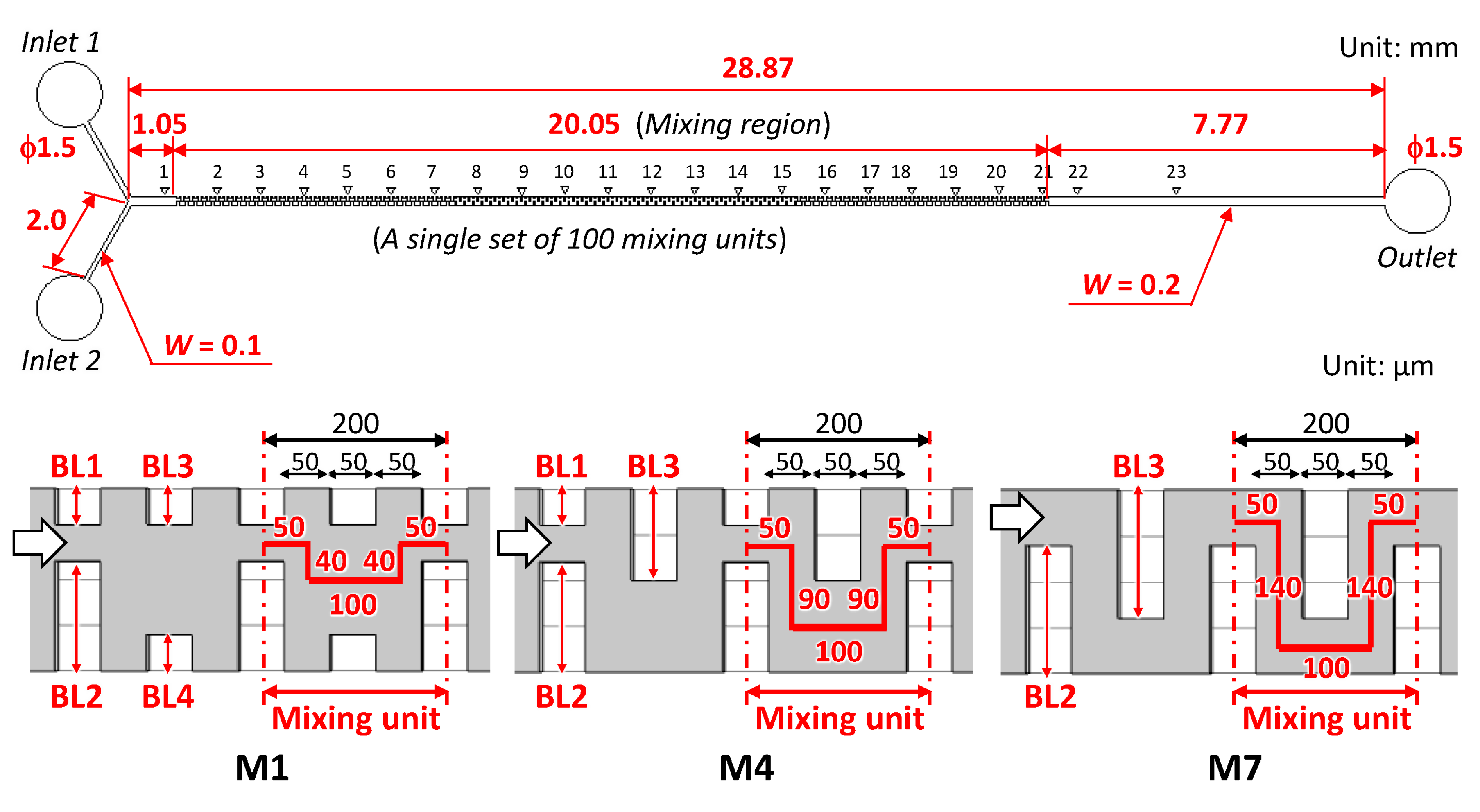
2.2. Fabrication Process and Experimental Investigation
3. Results and Discussion
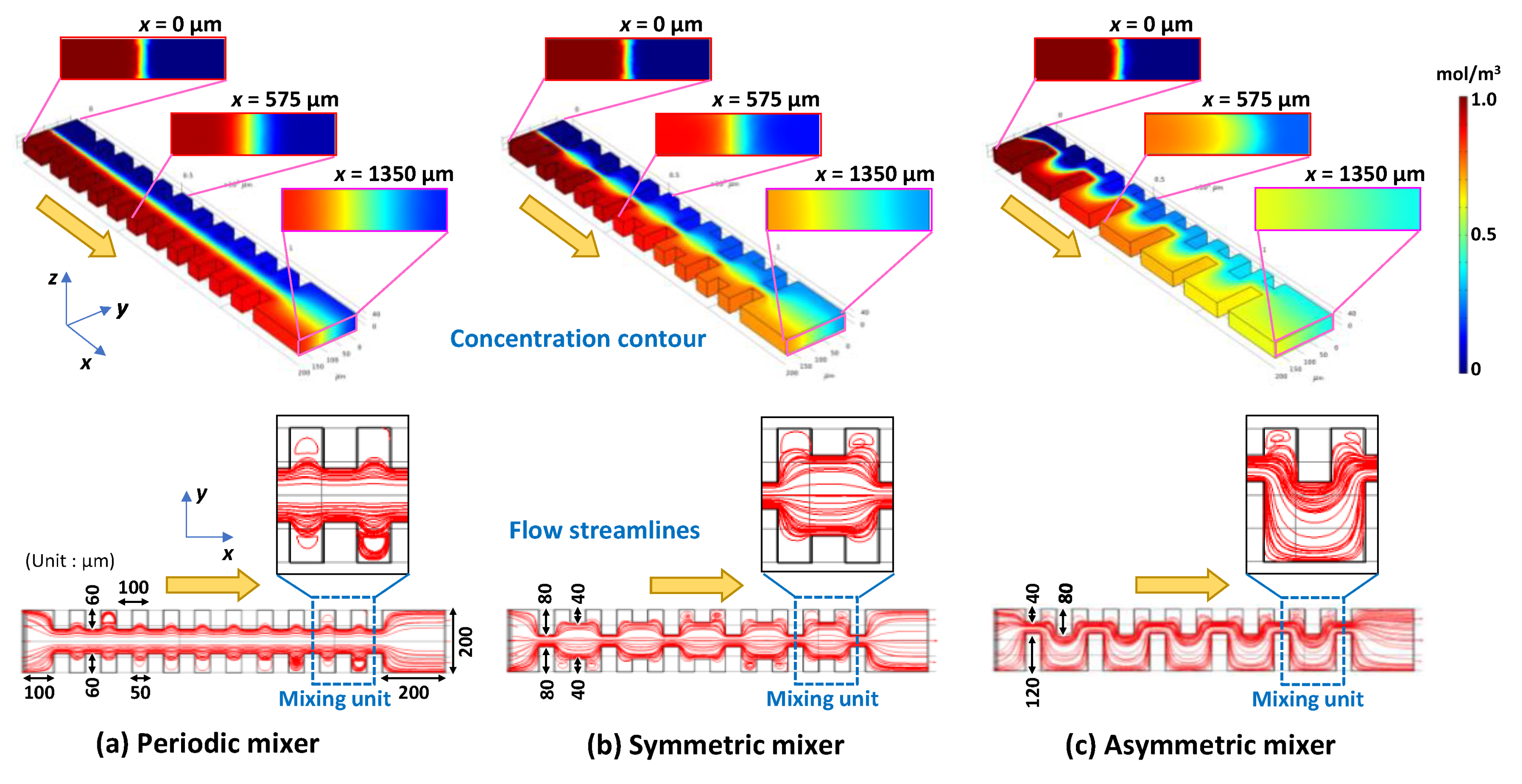
3.1. Computational Analysis of Mixing Phenomena in a Microchannel
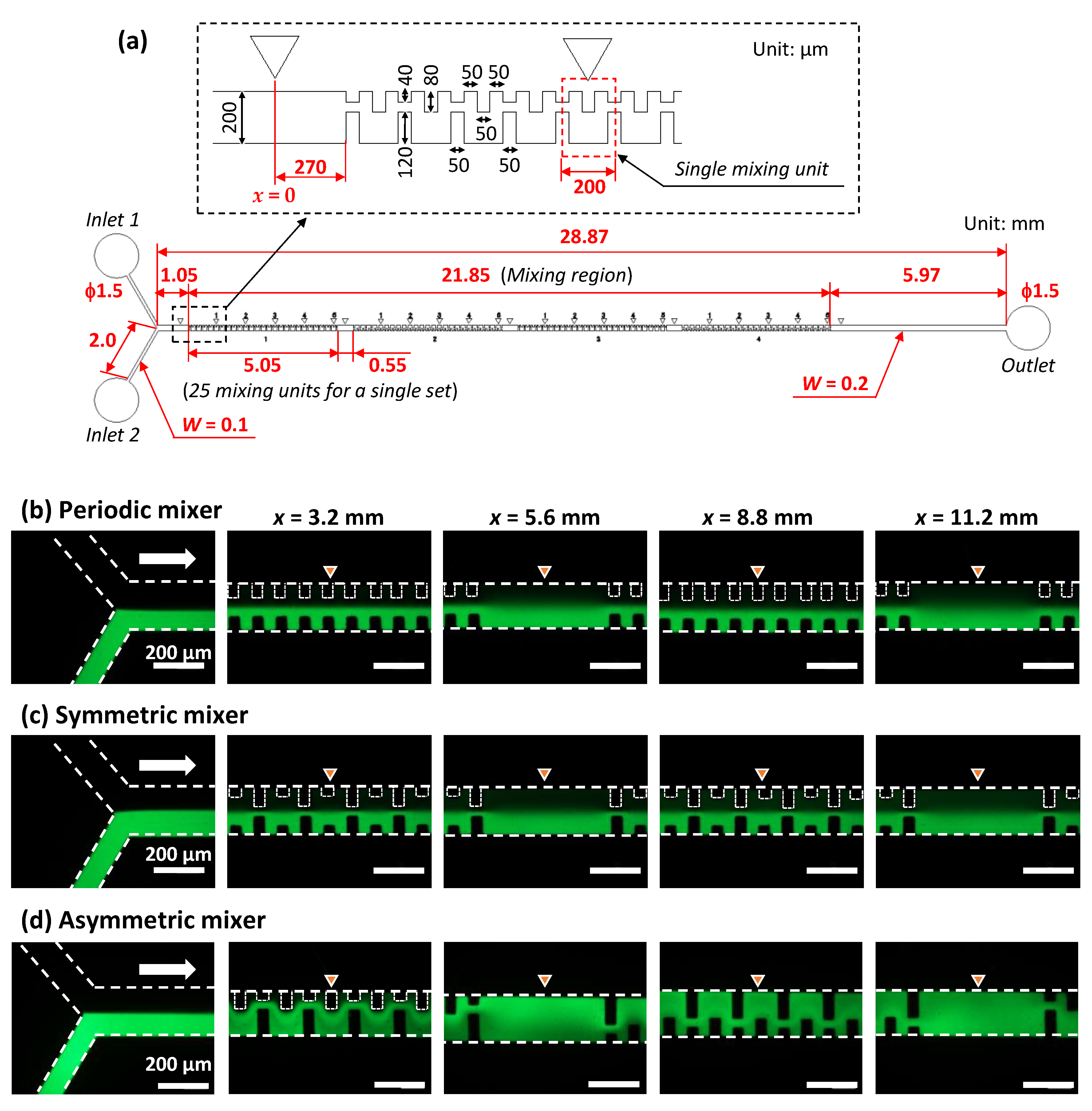
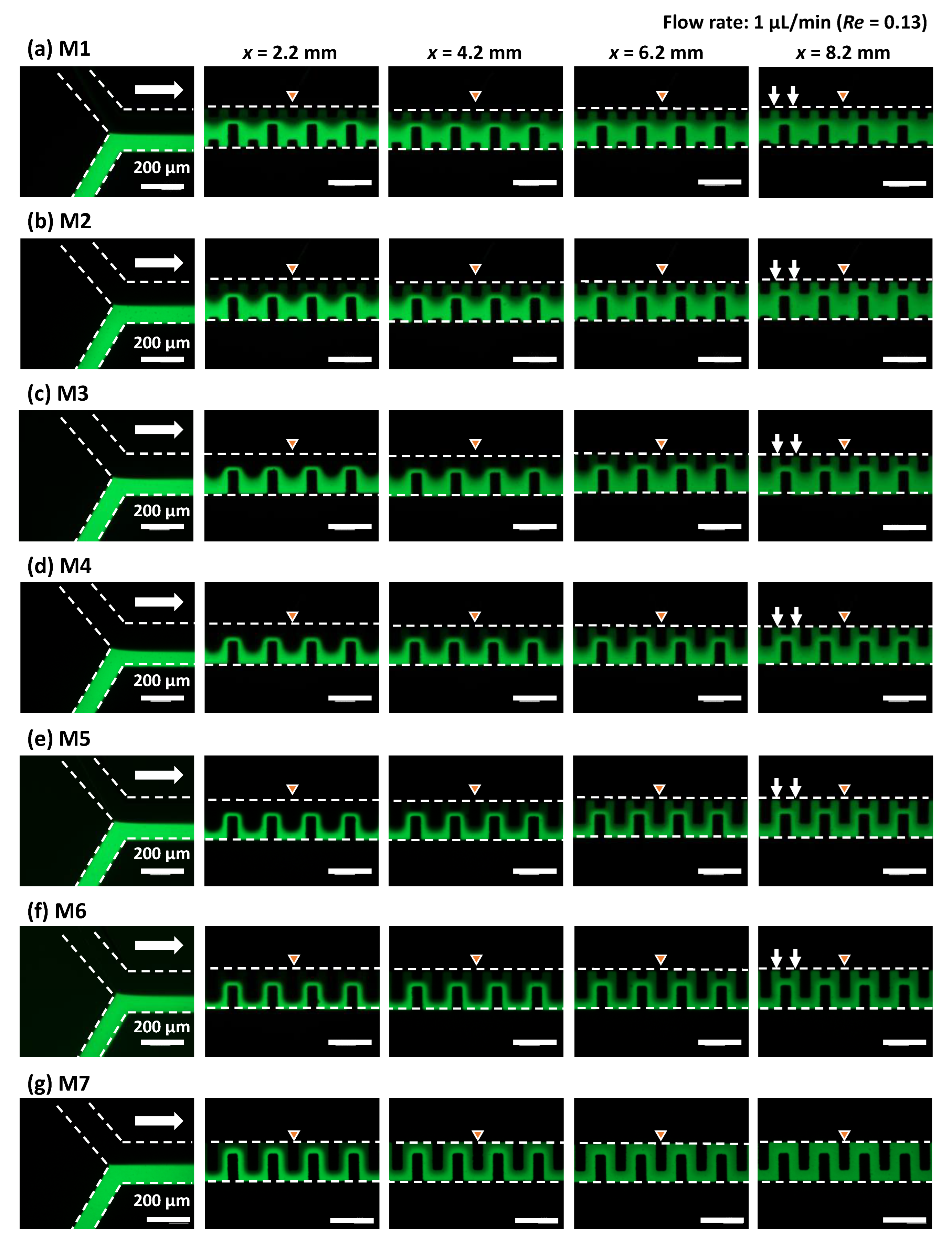
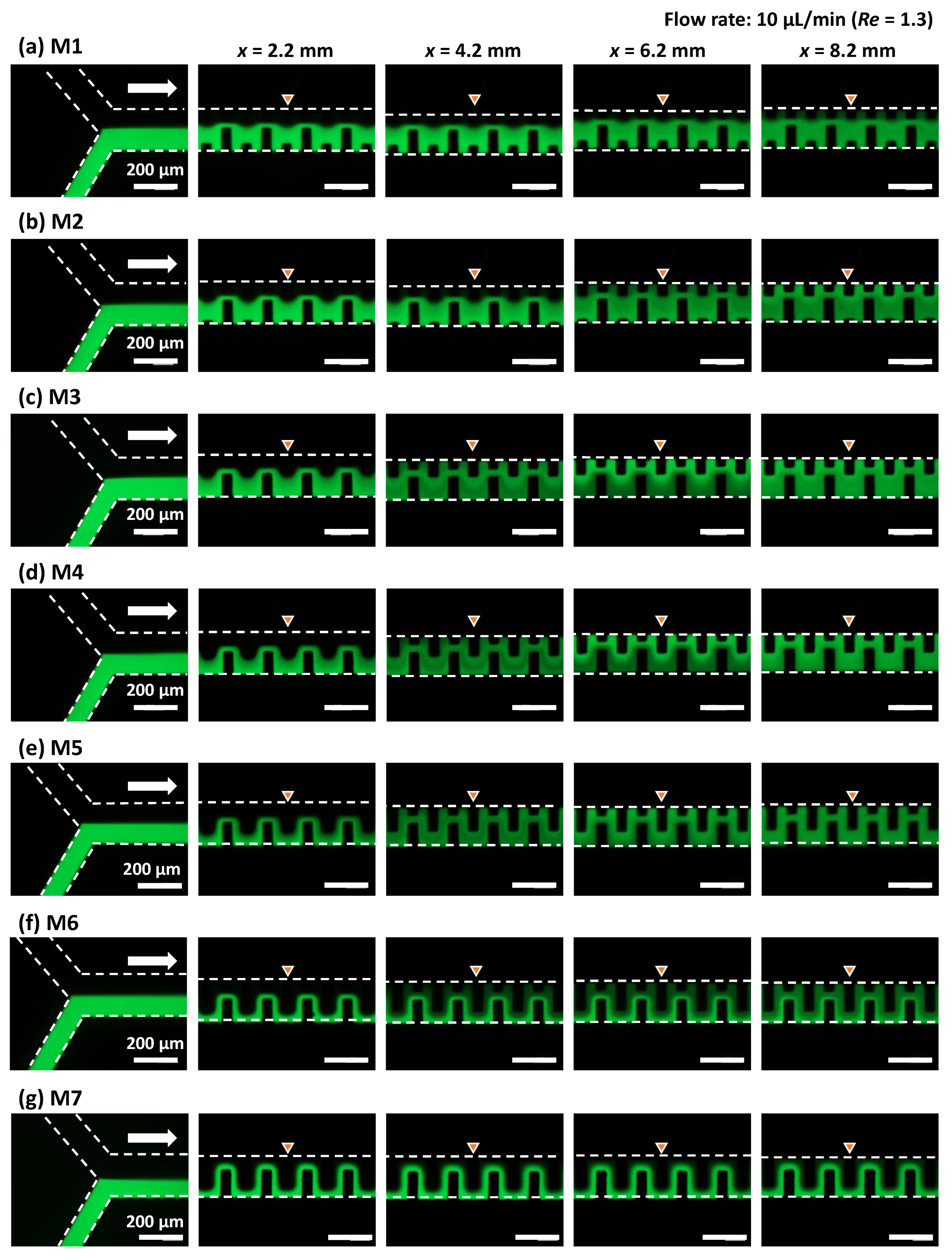
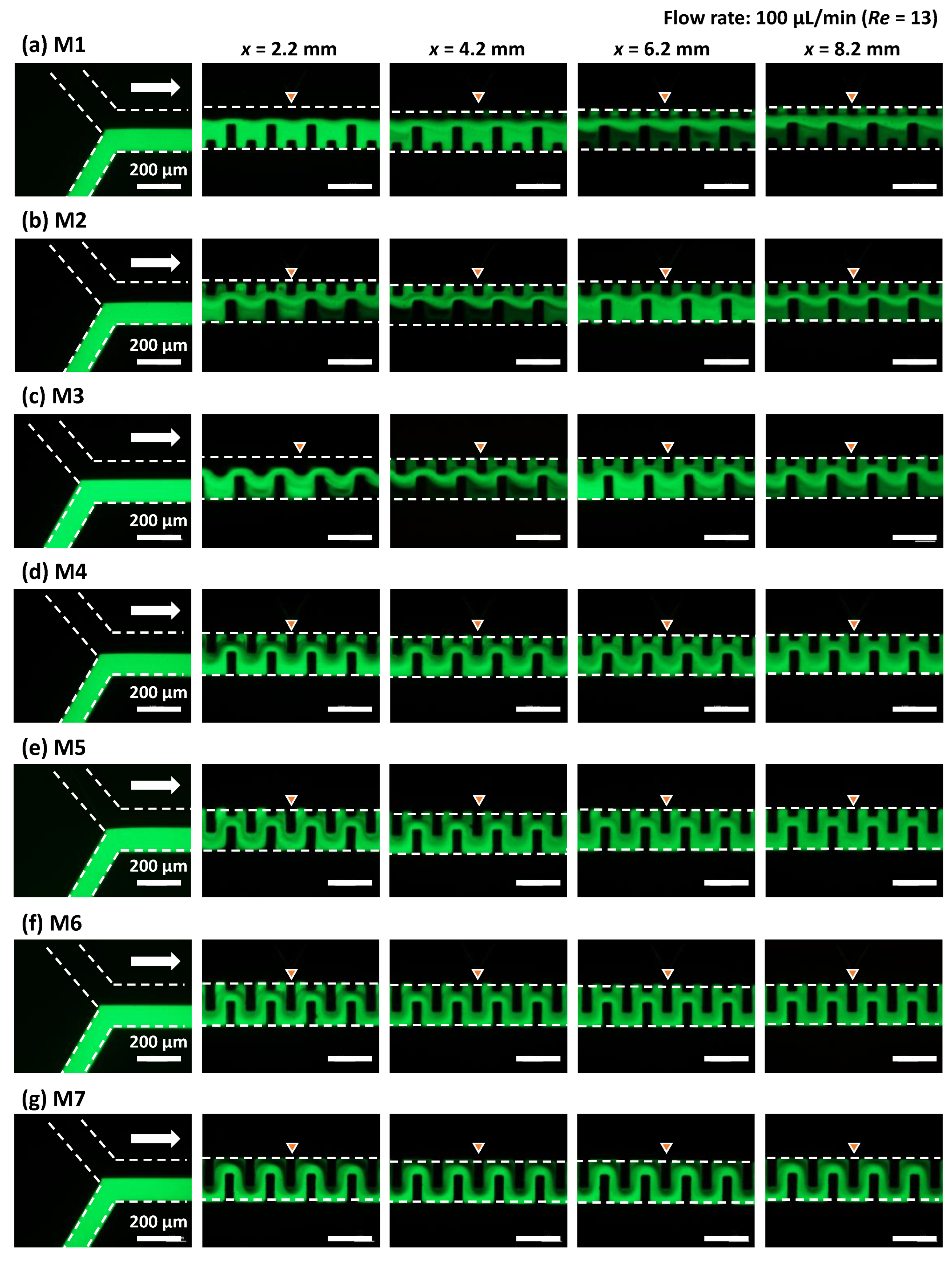
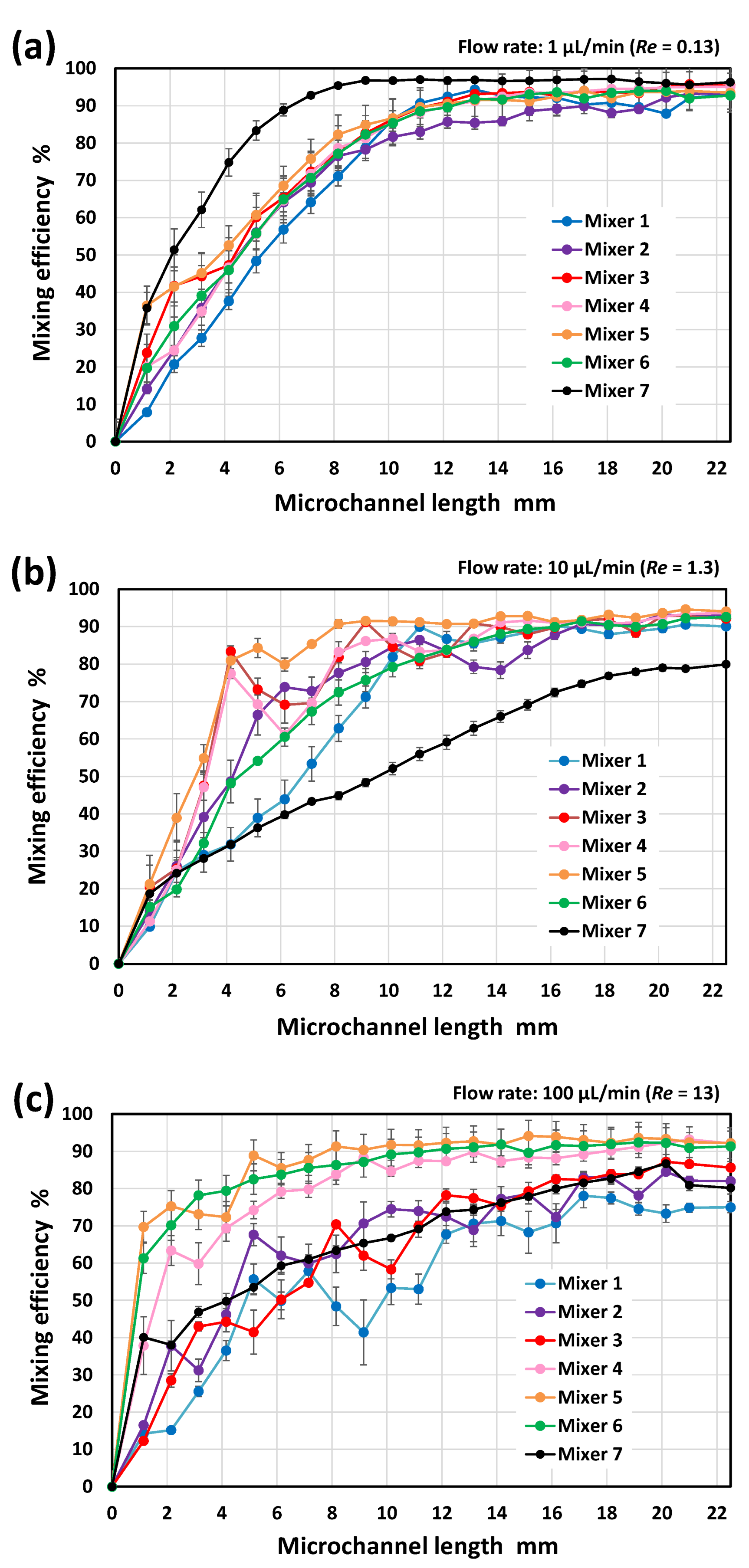
3.2. Experimental Investigation of Mixing Phenomena in a Microchannel
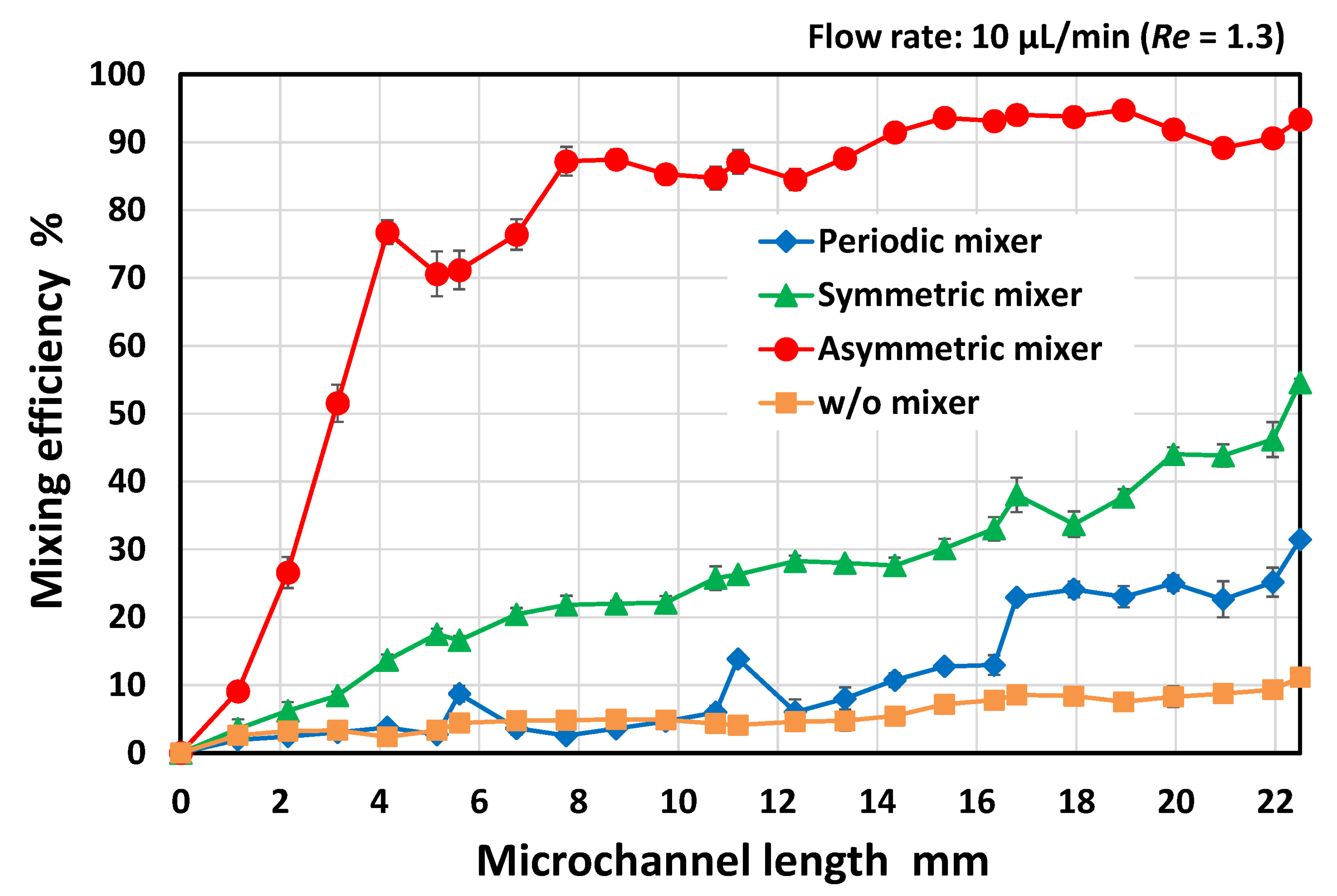
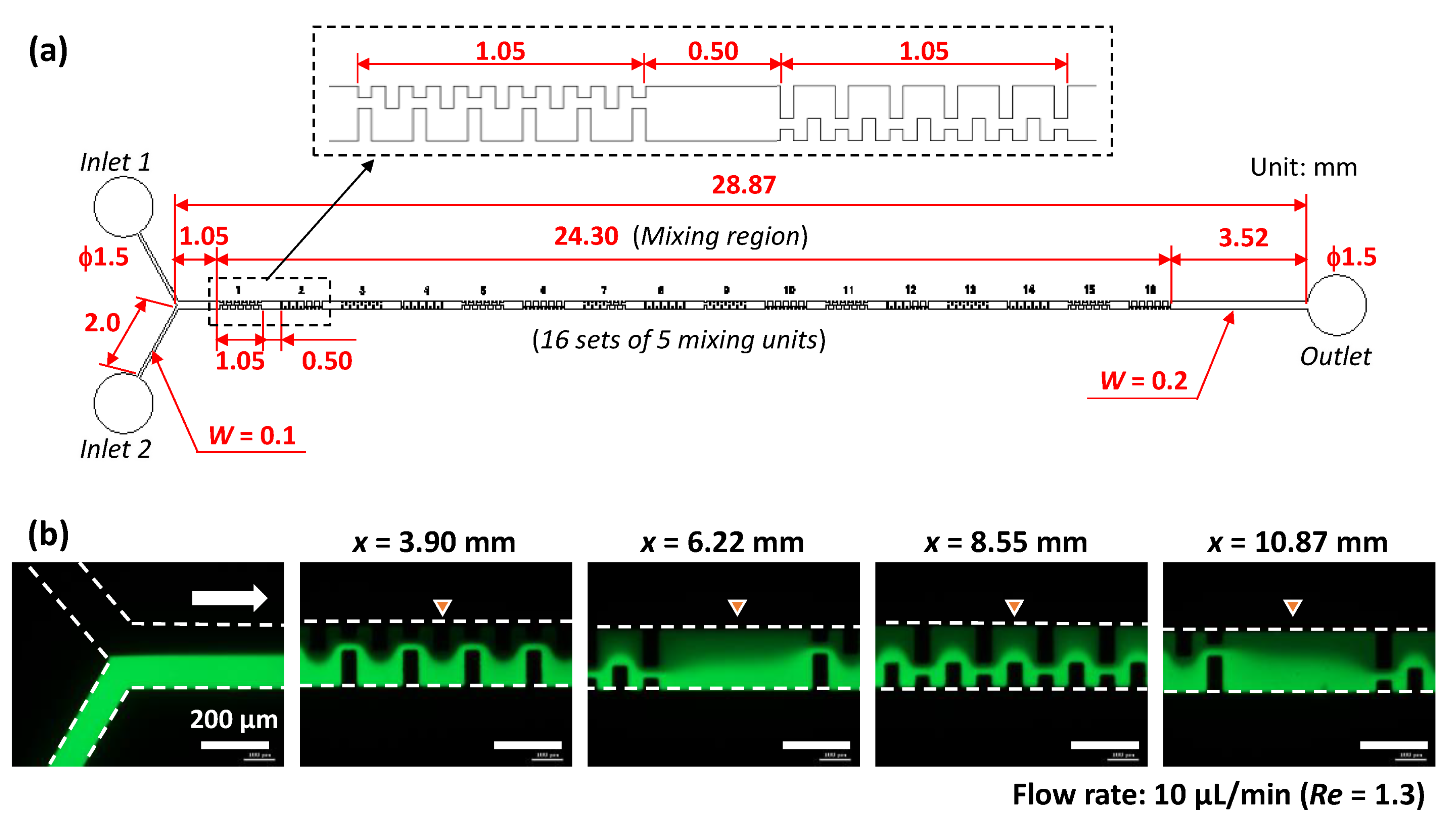
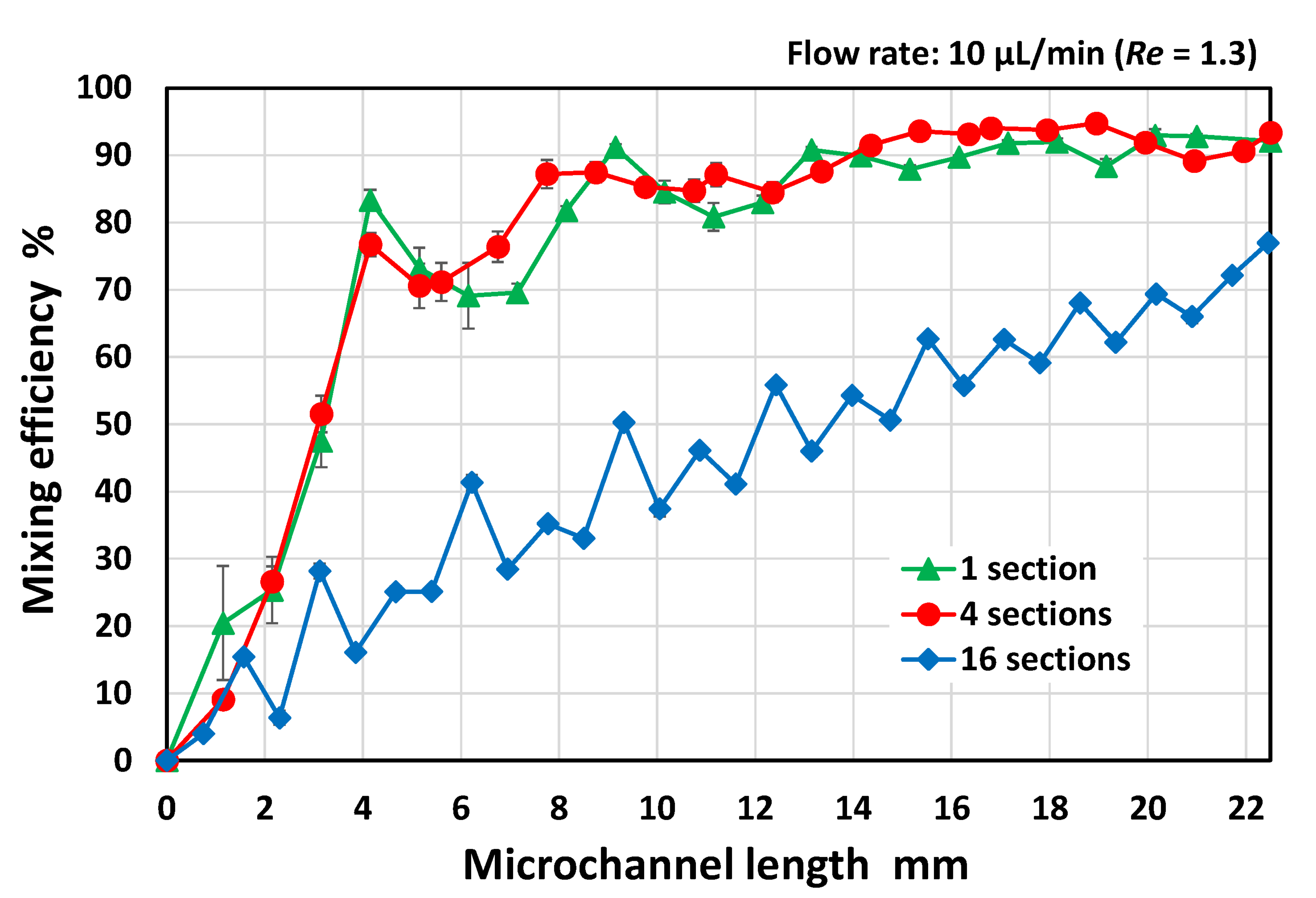
3.3. The Effect of the Number of Mixing Units
3.4. Design Optimization of the Asymmetric Planar Micromixers

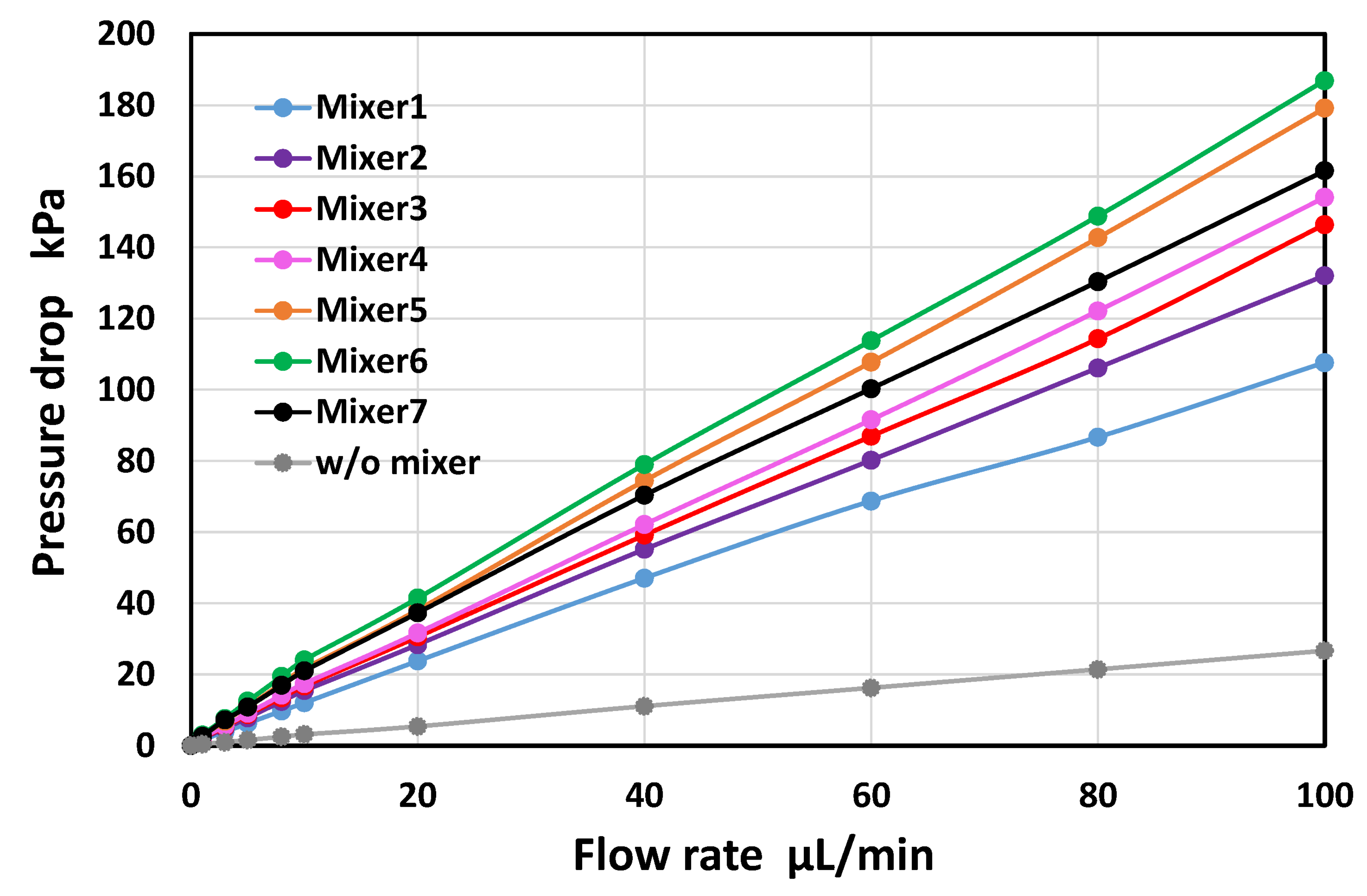
3.5. Experimental Investigation of Pressure Drop in the Asymmetric Planar Micromixers
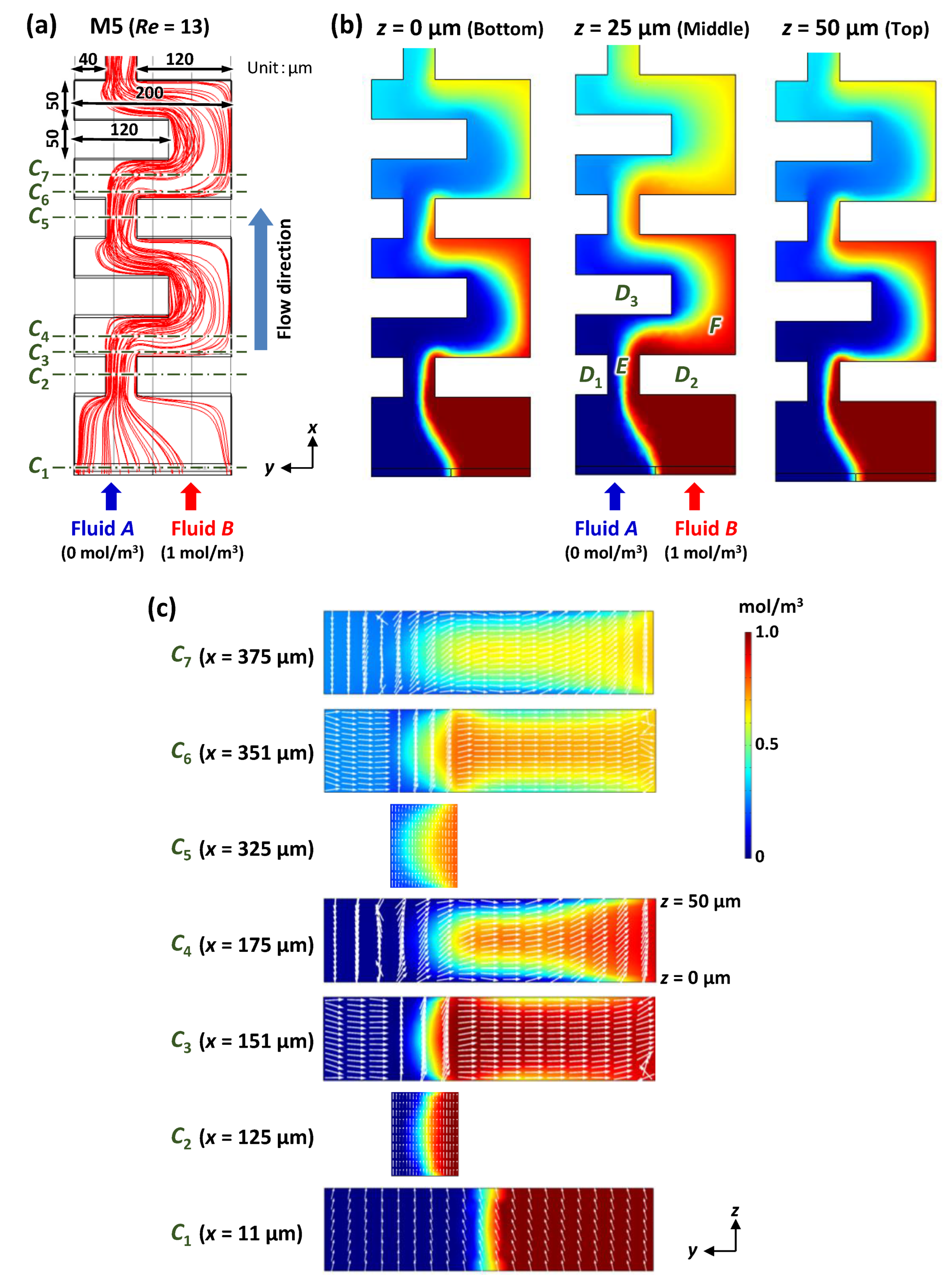
3.6. Mixing Mechanism of the Asymmetric Planar Micromixers
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Manz, A.; Graber, N.; Widmer, H. Miniaturized total chemical analysis systems: A novel concept for chemical sensing. Sens. Actuators B Chem. 1990, 1, 244–248. [Google Scholar] [CrossRef]
- Figeys, D.; Pinto, D. Lab-on-a-Chip: A revolution in biological and medical sciences. Anal. Chem. 2000, 72, 330A–335A. [Google Scholar] [CrossRef] [PubMed]
- Whitesides, G.M. The origins and the future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef] [PubMed]
- Abgrall, P.; Gué, A.-M. Lab-on-chip technologies: Making a microfluidic network and coupling it into a complete microsystem—A review. J. Micromech. Microeng. 2007, 17, R15–R49. [Google Scholar] [CrossRef]
- Mark, D.; Haeberle, S.; Roth, G.; von Stetten, F.; Zengerle, R. Microfluidic lab-on-a-chip platforms: Requirements, characteristics and applications. Chem. Soc. Rev. 2010, 39, 1153–1182. [Google Scholar] [CrossRef]
- Olanrewaju, A.; Beaugrand, M.; Yafia, M.; Juncker, D. Capillary microfluidics in microchannels: From microfluidic networks to capillaric circuits. Lab Chip 2018, 18, 2323–2347. [Google Scholar] [CrossRef]
- Azizipour, N.; Avazpour, R.; Rosenzweig, D.H.; Sawan, M.; Ajji, A. Evolution of Biochip Technology: A Review from Lab-on-a-Chip to Organ-on-a-Chip. Micromachines 2020, 11, 599. [Google Scholar] [CrossRef]
- Dragone, R.; Grasso, G.; Muccini, M.; Toffanin, S.; Grasso, G. Portable Bio/Chemosensoristic Devices: Innovative Systems for Environmental Health and Food Safety Diagnostics. Front. Public Health 2017, 5, 80. [Google Scholar] [CrossRef]
- Yoon, J.-Y.; Kim, B. Lab-on-a-Chip Pathogen Sensors for Food Safety. Sensors 2012, 12, 10713–10741. [Google Scholar] [CrossRef]
- Dhar, B.C.; Lee, N.Y. Lab-on-a-Chip Technology for Environmental Monitoring of Microorganisms. BioChip J. 2018, 12, 173–183. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Wu, Z. Micromixers—A review. J. Micromech. Microeng. 2005, 15, R1–R16. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Chang, C.-L.; Wang, Y.-N.; Fu, L.-M. Microfluidic Mixing: A Review. Int. J. Mol. Sci. 2011, 12, 3263–3287. [Google Scholar] [CrossRef]
- Cai, G.; Xue, L.; Zhang, H.; Lin, J. A Review on Micromixers. Micromachines 2017, 8, 274. [Google Scholar] [CrossRef]
- Bayareh, M.; Ashani, M.N.; Usefian, A. Active and passive micromixers: A comprehensive review. Chem. Eng. Process. Process Intensif. 2020, 147, 107771. [Google Scholar] [CrossRef]
- Lee, C.-Y.; Wang, W.-T.; Liu, C.-C.; Fu, L.-M. Passive mixers in microfluidic systems: A review. Chem. Eng. J. 2016, 288, 146–160. [Google Scholar] [CrossRef]
- Raza, W.; Hossain, S.; Kim, K.-Y. A Review of Passive Micromixers with a Comparative Analysis. Micromachines 2020, 11, 455. [Google Scholar] [CrossRef]
- Wong, S.H.; Ward, M.C.; Wharton, C.W. Micro T-mixer as a rapid mixing micromixer. Sens. Actuators B Chem. 2004, 100, 359–379. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, S.; Shao, T.; Jin, Y.; Cheng, Y. Visualization of micro-scale mixing in miscible liquids using μ-LIF technique and drug nano-particle preparation in T-shaped micro-channels. Chem. Eng. J. 2012, 192, 252–261. [Google Scholar] [CrossRef]
- Hossain, S.; Ansari, M.; Kim, K.-Y. Evaluation of the mixing performance of three passive micromixers. Chem. Eng. J. 2009, 150, 492–501. [Google Scholar] [CrossRef]
- Chen, X.; Li, T.; Zeng, H.; Hu, Z.; Fu, B. Numerical and experimental investigation on micromixers with serpentine microchannels. Int. J. Heat Mass Transf. 2016, 98, 131–140. [Google Scholar] [CrossRef]
- Tsai, C.-H.D.; Lin, X.-Y. Experimental Study on Microfluidic Mixing with Different Zigzag Angles. Micromachines 2019, 10, 583. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Liu, Z.; Cai, Y.; Wang, B.; Luo, X. A cost-effective serpentine micromixer utilizing ellipse curve. Anal. Chim. Acta 2021, 1155, 338355. [Google Scholar] [CrossRef] [PubMed]
- Hong, C.-C.; Choi, J.-W.; Ahn, C.H. A novel in-plane passive microfluidic mixer with modified Tesla structures. Lab Chip 2004, 4, 109–113. [Google Scholar] [CrossRef] [PubMed]
- Hossain, S.; Ansari, M.A.; Husain, A.; Kim, K.-Y. Analysis and optimization of a micromixer with a modified Tesla structure. Chem. Eng. J. 2010, 158, 305–314. [Google Scholar] [CrossRef]
- Yang, A.-S.; Chuang, F.-C.; Chen, C.-K.; Lee, M.-H.; Chen, S.-W.; Su, T.-L.; Yang, Y.-C. A high-performance micromixer using three-dimensional Tesla structures for bio-applications. Chem. Eng. J. 2015, 263, 444–451. [Google Scholar] [CrossRef]
- Liu, R.H.; Stremler, M.A.; Sharp, K.V.; Olsen, M.G.; Santiago, J.G.; Adrian, R.J.; Aref, H.; Beebe, D.J. Passive mixing in a three-dimensional serpentine microchannel. J. Microelectromech. Syst. 2000, 9, 190–197. [Google Scholar] [CrossRef]
- Vijayendran, R.A.; Motsegood, K.M.; Beebe, A.D.J.; Leckband, D.E. Evaluation of a Three-Dimensional Micromixer in a Surface-Based Biosensor. Langmuir 2003, 19, 1824–1828. [Google Scholar] [CrossRef]
- Nimafar, M.; Viktorov, V.; Martinelli, M. Experimental comparative mixing performance of passive micromixers with h-shaped sub-channels. Chem. Eng. Sci. 2012, 76, 37–44. [Google Scholar] [CrossRef]
- Viktorov, V.; Mahmud, R.; Visconte, C. Numerical study of fluid mixing at different inlet flow-rate ratios in Tear-drop and Chain micromixers compared to a new H-C passive micromixer. Eng. Appl. Comput. Fluid Mech. 2016, 10, 182–192. [Google Scholar] [CrossRef]
- Le The, H.; Le Thanh, H.; Dong, T.; Ta, B.Q.; Tran-Minh, N.; Karlsen, F. An effective passive micromixer with shifted trapezoidal blades using wide Reynolds number range. Chem. Eng. Res. Des. 2015, 93, 1–11. [Google Scholar] [CrossRef]
- Stroock, A.D.; Dertinger, S.K.W.; Ajdari, A.; Mezić, I.; Stone, H.A.; Whitesides, G.M. Chaotic Mixer for Microchannels. Science 2002, 295, 647–651. [Google Scholar] [CrossRef]
- Ianovska, M.A.; Mulder, P.P.M.F.A.; Verpoorte, E. Development of small-volume, microfluidic chaotic mixers for future application in two-dimensional liquid chromatography. RSC Adv. 2017, 7, 9090–9099. [Google Scholar] [CrossRef]
- Kim, D.S.; Lee, S.W.; Kwon, T.H.; Lee, S.S. A barrier embedded chaotic micromixer. J. Micromech. Microeng. 2004, 14, 798–805. [Google Scholar] [CrossRef]
- Wang, L.; Ma, S.; Wang, X.; Bi, H.; Han, X. Mixing enhancement of a passive microfluidic mixer containing triangle baffles. Asia-Pac. J. Chem. Eng. 2014, 9, 877–885. [Google Scholar] [CrossRef]
- Fang, Y.; Ye, Y.; Shen, R.; Zhu, P.; Guo, R.; Hu, Y.; Wu, L. Mixing enhancement by simple periodic geometric features in microchannels. Chem. Eng. J. 2012, 187, 306–310. [Google Scholar] [CrossRef]
- Li, J.; Xia, G.; Li, Y. Numerical and experimental analyses of planar asymmetric split-and-recombine micromixer with dislocation sub-channels. J. Chem. Technol. Biotechnol. 2013, 88, 1757–1765. [Google Scholar] [CrossRef]
- Scherr, T.; Quitadamo, C.; Tesvich, P.; Park, D.S.-W.; Tiersch, T.; Hayes, D.; Choi, J.-W.; Nandakumar, K.; Monroe, W.T. A planar microfluidic mixer based on logarithmic spirals. J. Micromech. Microeng. 2012, 22, 055019. [Google Scholar] [CrossRef]
- Cosentino, A.; Madadi, H.; Vergara, P.; Vecchione, R.; Causa, F.; Netti, P.A. An efficient planar accordion-shaped micromixer: From biochemical mixing to biological application. Sci. Rep. 2015, 5, 17876. [Google Scholar] [CrossRef]
- Gidde, R.R.; Pawar, P.M.; Ronge, B.P.; Misal, N.D.; Kapurkar, R.B.; Parkhe, A.K. Evaluation of the mixing performance in a planar passive micromixer with circular and square mixing chambers. Microsyst. Technol. 2018, 24, 2599–2610. [Google Scholar] [CrossRef]
- Jain, S.; Unni, H.N. Numerical modeling and experimental validation of passive microfluidic mixer designs for biological applications. AIP Adv. 2020, 10, 105116. [Google Scholar] [CrossRef]
- Bazaz, S.R.; Mehrizi, A.A.; Ghorbani, S.; Vasilescu, S.; Asadnia, M.; Warkiani, M.E. A hybrid micromixer with planar mixing units. RSC Adv. 2018, 8, 33103–33120. [Google Scholar] [CrossRef]
- Natsuhara, D.; Takishita, K.; Tanaka, K.; Kage, A.; Suzuki, R.; Mizukami, Y.; Saka, N.; Nagai, M.; Shibata, T. A Microfluidic Diagnostic Device Capable of Autonomous Sample Mixing and Dispensing for the Simultaneous Genetic Detection of Multiple Plant Viruses. Micromachines 2020, 11, 540. [Google Scholar] [CrossRef]
- Misawa, S.; Natsuhara, D.; Kiba, Y.; Yamamuro, T.; Suzuki, R.; Shibata, T.; Kitamura, M. Rapid identification of Colchicum autumnale based on loop-mediated isothermal amplification (LAMP) assay. Forensic Toxicol. 2021, 39, 259–265. [Google Scholar] [CrossRef]
- Natsuhara, D.; Saito, R.; Aonuma, H.; Sakurai, T.; Okamoto, S.; Nagai, M.; Kanuka, H.; Shibata, T. A method of sequential liquid dispensing for the multiplexed genetic diagnosis of viral infections in a microfluidic device. Lab Chip 2021, 21, 4779–4790. [Google Scholar] [CrossRef]
- Natsuhara, D.; Misawa, S.; Saito, R.; Shirai, K.; Okamoto, S.; Nagai, M.; Kitamura, M.; Shibata, T. A microfluidic diagnostic device with air plug-in valves for the simultaneous genetic detection of various food allergens. Sci. Rep. 2022, 12, 12852. [Google Scholar] [CrossRef]
- Culbertson, C.T. Diffusion coefficient measurements in microfluidic devices. Talanta 2002, 56, 365–373. [Google Scholar] [CrossRef]
- Yildirim, E.; Trietsch, S.J.; Joore, J.; Berg, A.V.D.; Hankemeier, T.; Vulto, P. Phaseguides as tunable passive microvalves for liquid routing in complex microfluidic networks. Lab Chip 2014, 14, 3334–3340. [Google Scholar] [CrossRef]
- Al-Halhouli, A.; Alshare, A.; Mohsen, M.; Matar, M.; Dietzel, A.; Büttgenbach, S. Passive Micromixers with Interlocking Semi-Circle and Omega-Shaped Modules: Experiments and Simulations. Micromachines 2015, 6, 953–968. [Google Scholar] [CrossRef] [Green Version]












| Mixer | BL1 (µm) | BL2 (µm) | BL3 (µm) | BL4 (µm) | UL (µm) |
|---|---|---|---|---|---|
| M1 | 40 | 120 | 40 | 40 | 280 |
| M2 | 40 | 120 | 60 | 20 | 320 |
| M3 | 40 | 120 | 80 | 0 | 360 |
| M4 | 40 | 120 | 100 | 0 | 380 |
| M5 | 40 | 120 | 120 | 0 | 400 |
| M6 | 40 | 120 | 140 | 0 | 420 |
| M7 | 0 | 140 | 140 | 0 | 480 |
| Mixer | Slope (kPa/(µL/min)) | R2 |
|---|---|---|
| M1 | 1.10 | 0.9986 |
| M2 | 1.33 | 0.9997 |
| M3 | 1.46 | 0.9996 |
| M4 | 1.54 | 0.9998 |
| M5 | 1.80 | 0.9996 |
| M6 | 1.89 | 0.9992 |
| M7 | 1.65 | 0.9983 |
| w/o | 0.27 | 0.9996 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Natsuhara, D.; Saito, R.; Okamoto, S.; Nagai, M.; Shibata, T. Mixing Performance of a Planar Asymmetric Contraction-and-Expansion Micromixer. Micromachines 2022, 13, 1386. https://doi.org/10.3390/mi13091386
Natsuhara D, Saito R, Okamoto S, Nagai M, Shibata T. Mixing Performance of a Planar Asymmetric Contraction-and-Expansion Micromixer. Micromachines. 2022; 13(9):1386. https://doi.org/10.3390/mi13091386
Chicago/Turabian StyleNatsuhara, Daigo, Ryogo Saito, Shunya Okamoto, Moeto Nagai, and Takayuki Shibata. 2022. "Mixing Performance of a Planar Asymmetric Contraction-and-Expansion Micromixer" Micromachines 13, no. 9: 1386. https://doi.org/10.3390/mi13091386