2.1. Benchmark Definition—Geometry Description
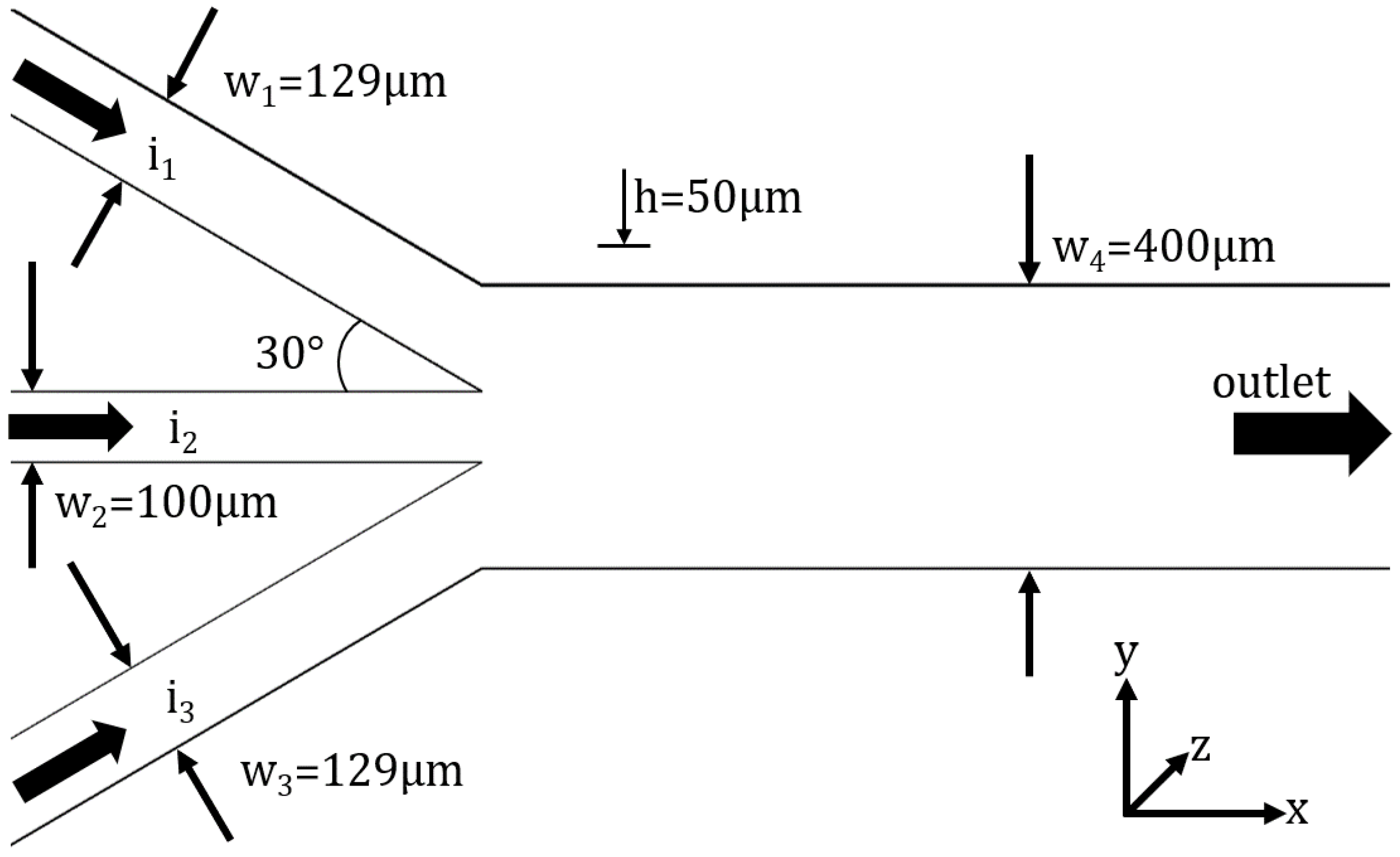
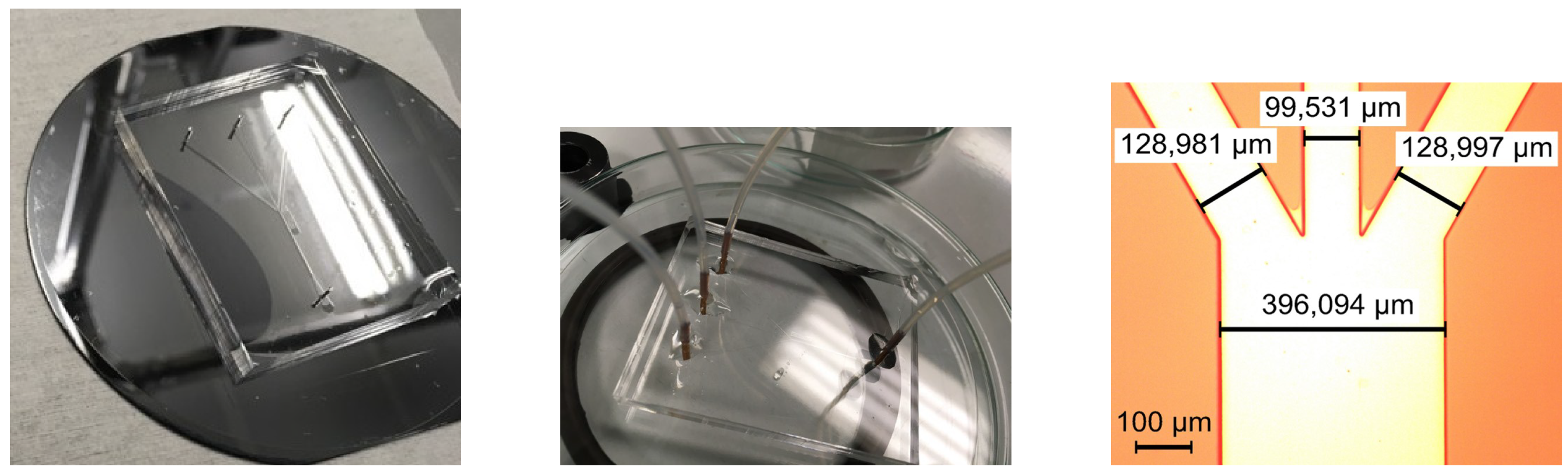
To study the interface between immiscible fluids, a trifurcation microchannel is used, and is presented in
Figure 1. The microchannel has the following characteristic dimensions: the central branch has a width of 100
, the lateral branches have a width of 129
, and the main channel has a width of 400
, with an angle between the central branch and the lateral branches of 30
. The microchannel has a height of 50
and a length, before and after the junction, of 2 cm.
One of the main targets of the present work was to define a benchmark microchannel geometry which might be used to study the dynamics of the interface in relation to different applications. We took into consideration the following: the study of the interface under symmetric and non-symmetric perturbations. This is the reason why we designed a three-entrance microchannel symmetric geometry. The non-symmetry will be induced to the interface using different flow rates or fluids on the lateral branches. The angle of 30
is very common in many configurations, e.g., the branches in a respiratory system, and the Y-microchannel configuration used in mixing [
21]. Finally, we decided to have the main width of 400
m and an aspect ratio of 0.125. At this dimension and ratio, the influence of gravity can be neglected, and the flow dynamics are very close to the Hele–Shaw flow. We chose the ratio between the central inlet channel and the main channel 1:4 because one of our targets is to also to study the stability of a viscoelastic fluid interface and this extension/contraction flow is used in non-Newtonian studies.
The working fluids used in this study were sunflower oil and deionized water. The material properties of the working fluids, density, and viscosity are presented in
Table 1 and they were experimentally determined using a mass per volume method and a standard oscillatory test. The interfacial tension between them was determined using the pendant drop method.
2.3. Mesh, Boundary Conditions and Initial Conditions
In
Figure 1, the region of interest of the geometry is presented, as well as the boundary conditions. At the inlets, we have a velocity inlet, while at the outlet, the relative pressure is set to 0 and the walls have a no-slip boundary condition. Two meshes were used in the VOF simulations and their characteristics are presented in
Table 2. Compared to the first mesh, the second mesh is coarser, but it has more elements in the region of interest. For a high-quality mesh, both the minimum orthogonal quality and maximum aspect ratio must be close to 1; thus, as it can be seen in
Table 2, mesh #1 is better than mesh #2.
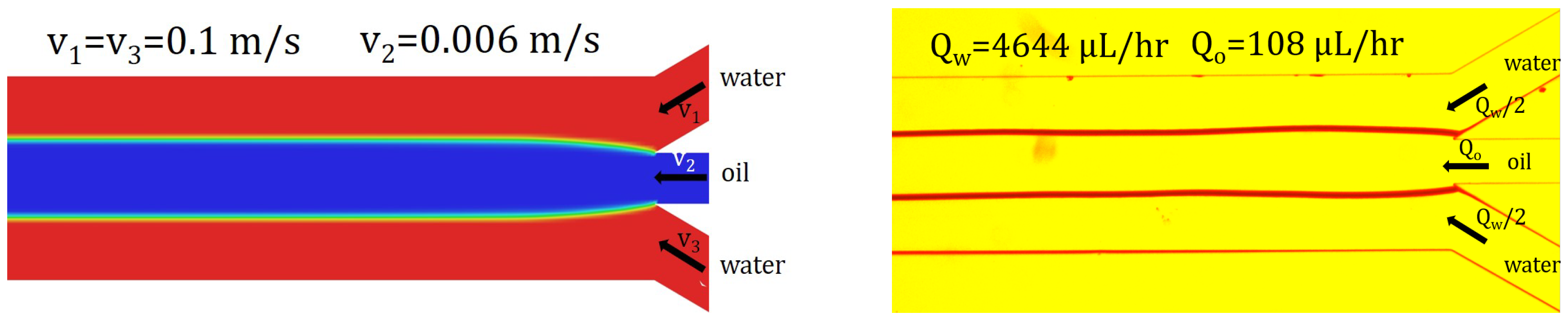
The initial condition for these simulations is the value of the velocity at the inlets. For the side branches of the microchannel, we have m/s and for the central branch we have m/s. Additionally, to shorten the simulation time, the microchannel is filled with deionized water, while the second inlet is patched with sunflower oil.
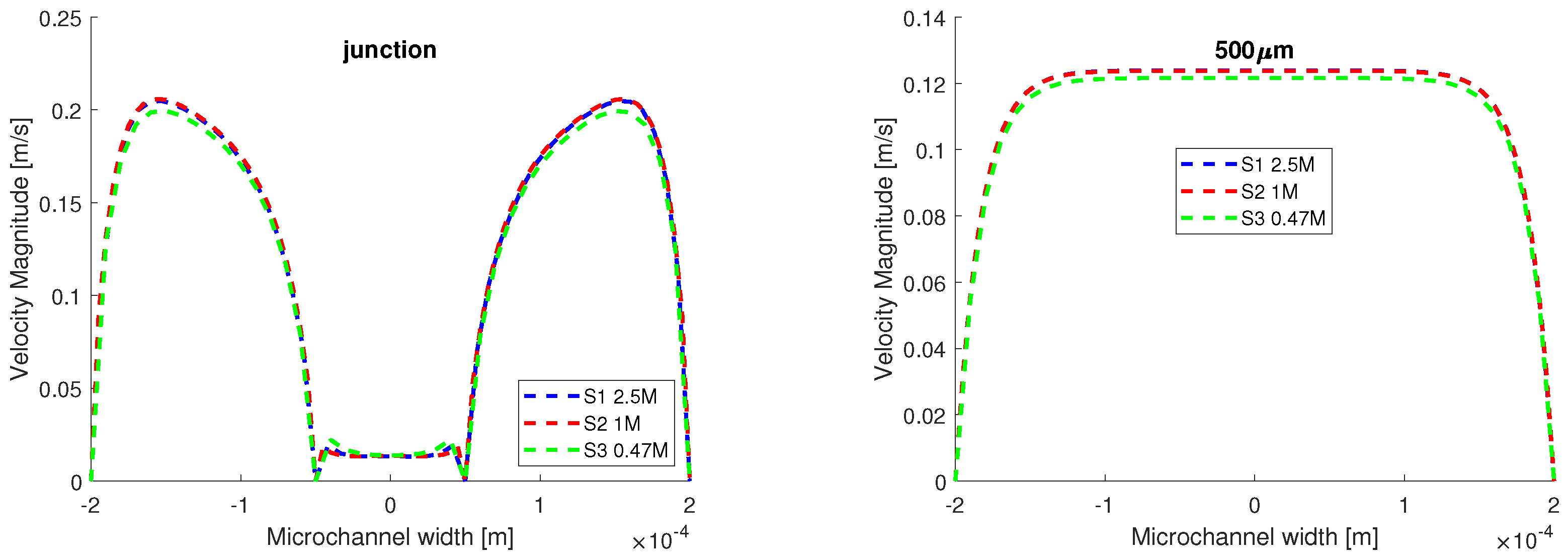
Given that the VOF method is very numerically expensive, the grid test was performed using the same initial and boundary conditions described above, in laminar flow, with a single working fluid, water. The velocity distribution is plotted on two lines perpendicular to the flow field in
Figure 2, one at the junction, and the other at 500
away, where the flow was fully developed. The results from the third simulation, where a coarser mesh was used, differ from the first two, which were performed on the finer meshes. As such, we proceed further using the first two meshes.
2.4. Numerical Details
To investigate the benchmark problem, the VOF method was used in the ANSYS Fluent numerical code. Two VOF formulations were tested with the same initial and boundary conditions. Both formulations can be used to solve transient flows. In both numerical simulations, the laminar flow model was used, since the Reynolds number for the aqueous phase is , while for the oil phase, it is .
The explicit formulation of the VOF method is specialized for transient flows with a constraint on the timestep and it was tested on mesh #1. This formulation is non-iterative and time-dependent, it has better numerical accuracy than the implicit formulation, but it has a limited timestep ( s for this simulation). The VOF method in this formulation has its Courant number set to 0.25. The interface modeling is sharp, and water is set as the primary phase, while sunflower oil is set as the second phase, because water has a higher density. The pressure–velocity coupling is performed using PISO, the transient formulation is first-order implicit and for the spatial discretization the following schemes were used: Green–Gauss cell-based for gradient, PRESTO! for pressure, QUICK for momentum and modified HRIC (high-resolution interface capturing) for the volume fraction.
The implicit formulation of the VOF method can be used for both steady or transient flows, which allows larger time steps and it was tested on mesh #2. The formulation is iterative, and the solution is achieved faster than in the explicit formulation (maximum allowed timestep for our simulation was s). The interface is modeled in the same manner as in the explicit formulation. The first difference between the numerical setups comes from the pressure–velocity coupling. In the implicit formulation, the SIMPLE algorithm was used instead of PISO due to the fact that the PISO was diverging from the start of the simulation and the transient formulation was bounded second-order implicit. The spatial discretization is done using the following schemes: least squares cell-based for gradient, PRESTO! for pressure, second-order upwind for momentum and modified HRIC for the volume fraction. The second difference comes from the spatial discretization, where for the gradient method, a more expensive scheme compensates for the reduced number of elements of the second grid.
For the unsteady incompressible flows, the numerical solutions of the momentum and continuity equations are obtained using the velocity–pressure coupling methods SIMPLE and/or PISO. Following these procedures, the pressure term from the equation of motion is solved using a discrete Poisson equation; an iterative scheme is used for each time step until the divergence-free velocity is obtained with the imposed accuracy [
25].
In both simulations, an adaptive timestep was imposed under the constriction that the Global CFL . The initial timestep size was s, but after a few iterations, it was reduced to s for the explicit simulation, and s for the implicit simulation. Regarding the convergence, the desired numerical time was s. The residuals were set to , and after 1 s, the mass flow rate balance was checked between the inlet and the outlet. This resulted in the net mass flow rate of kg/s.
2.5. Results
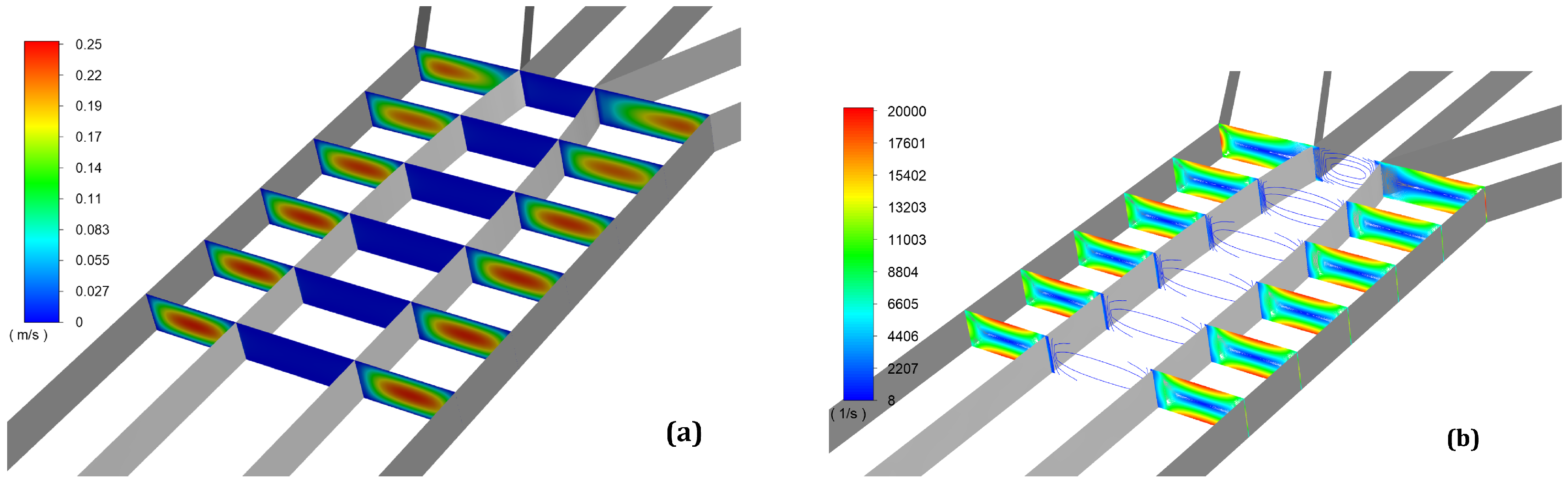
In
Figure 3a, the contours of velocity magnitude are presented. The contours are displayed on six planes that are perpendicular to the flow. The distance between the planes is 100
. It is notable from the first planes that the velocity profile is not yet fully developed. At the final planes, placed at 400 and 500
away from the junctions, the contours look similar. The maximum velocity recorded in the case of the trifurcation microchannel is 0.24 m/s. In
Figure 3b, the contours of vorticity magnitude are presented. The color map was capped at 20,000 1/s to see where the maximum values of vorticity appear.
As expected, the maximum values of vorticity are at the walls. The maximum values of vorticity for the aqueous phase are recorded at the walls which are parallel to the flow field; this might be due to the low aspect ratio of the microchannel. We chose to enter with a more viscous fluid in a less viscous medium
in order to avoid the occurrence of the Saffman–Taylor instability [
26].
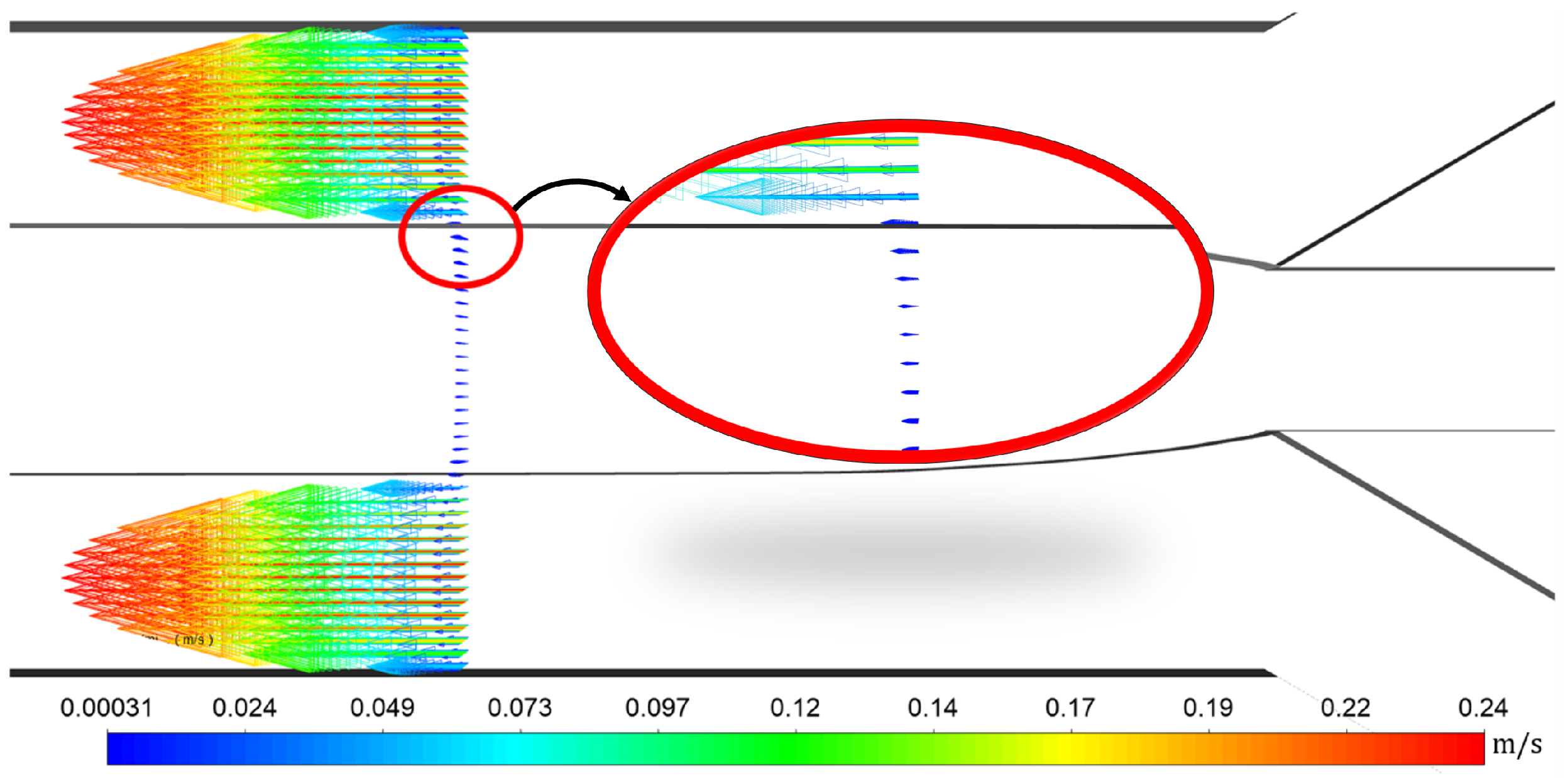
In
Figure 4, the velocity vectors are presented starting from a plane of 500
away from the junction. The velocity vectors are presented at a doubled scale to show the parabolic profile of the aqueous phase and its influence on the oil phase. A phenomenon was observed at the interface, due to the high difference in the magnitude of the velocity between the two phases, the interface acts as a moving wall and it drags the oil phase, thus resulting in an accelerated flow near the interface for the oil phase.
We begin the comparison between the two numerical simulations, where S1 is the explicit VOF simulation performed on the 2.5 M elements mesh while S2 is the implicit VOF simulation performed on the 1M elements mesh. In
Figure 5, the phase contour is presented alongside the grid spacing for each simulation, and it can be seen that the interface in S1 is more diffuse than the interface in S2, given the clear difference between the two meshes. Furthermore, a diffuse interface is related to the spurious currents generated at the interface [
27], and for the explicit VOF, more spurious currents were generated. The S2 mesh has more elements after the junction than S1 mesh.
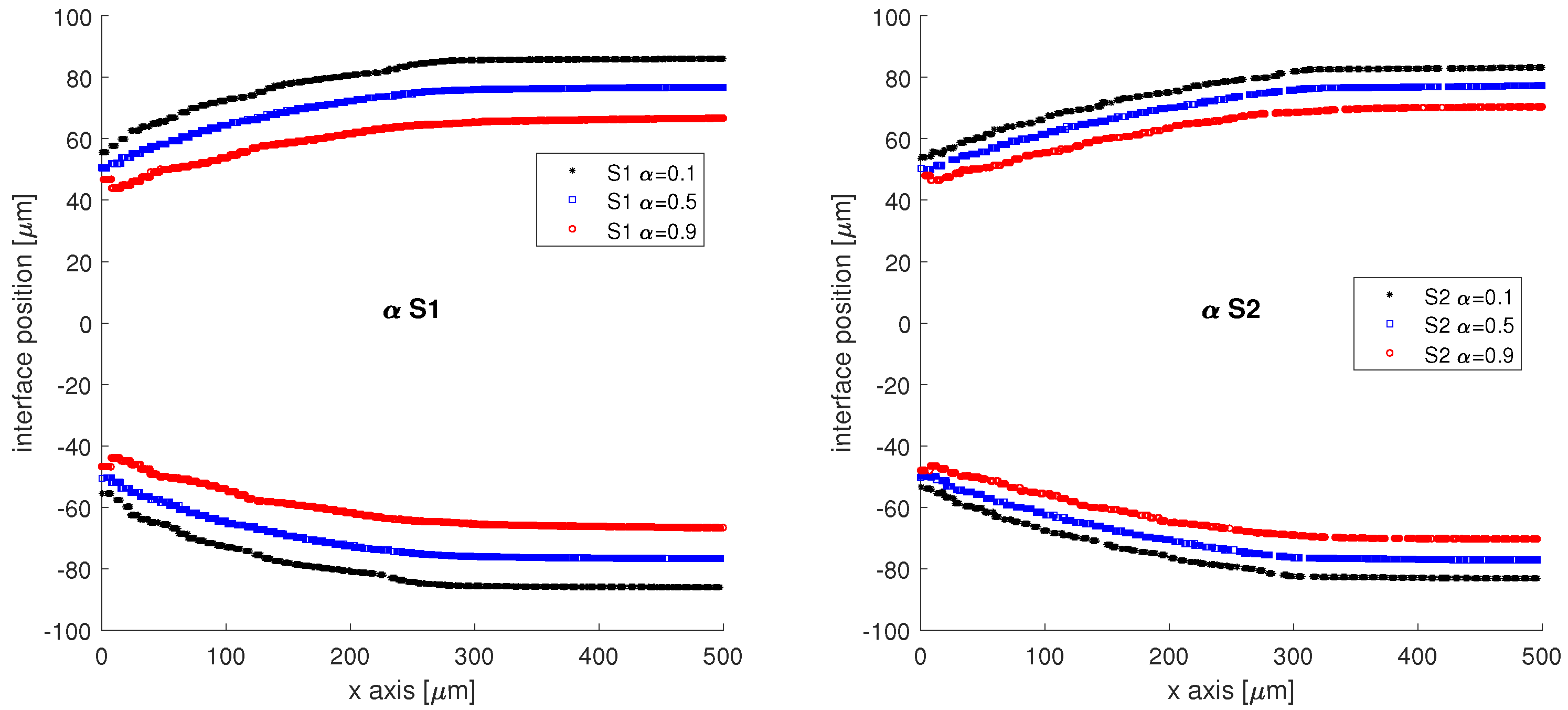
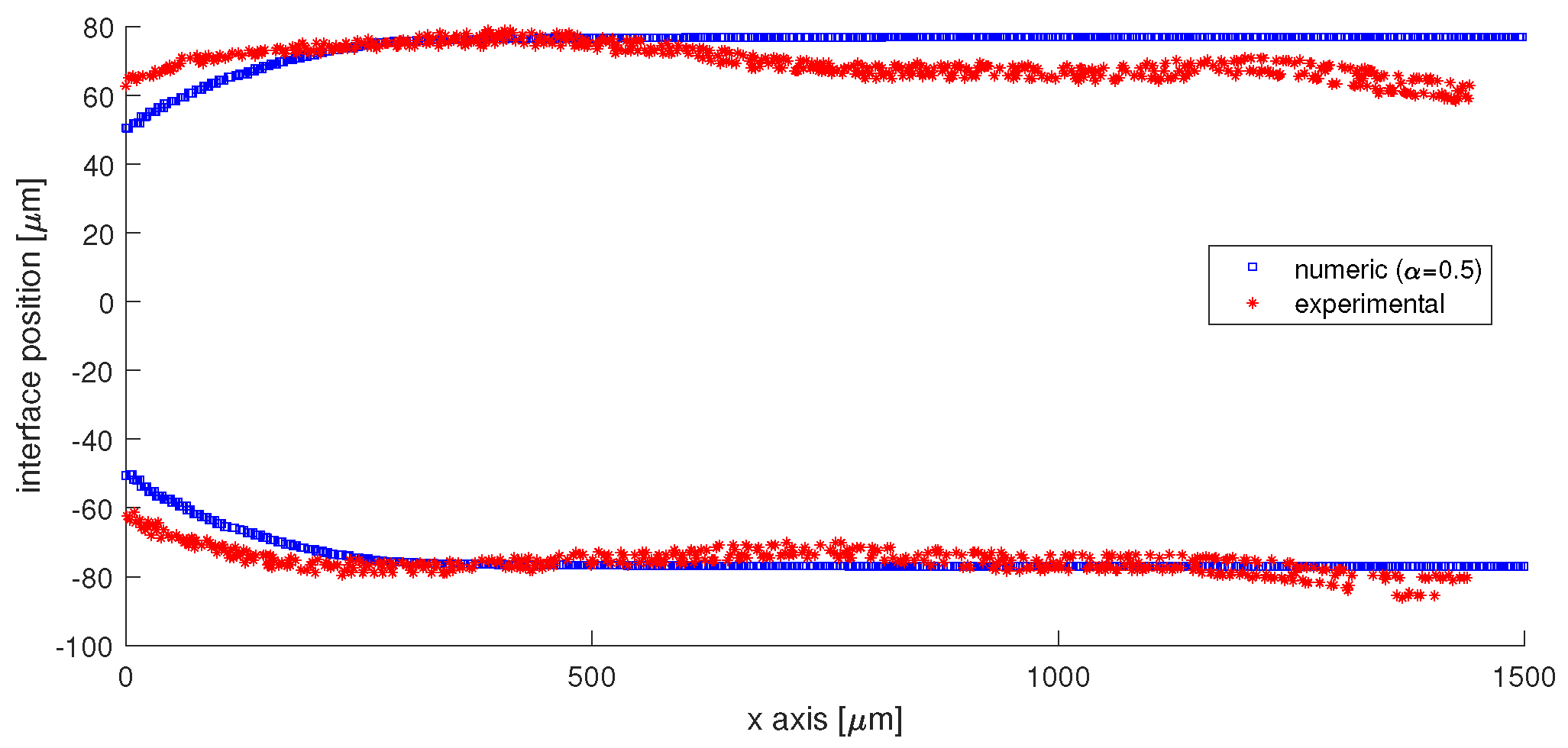
In
Figure 6, the interface is reconstructed and the lines of constant volume fraction are presented for both simulations starting from the junction (
m) to
m on the x axis. The previously reported numerical diffusion can now be observed for the S1 simulation, where the interface band has a thickness of 19.31
m, compared to 12.77
m, the thickness of the S2 band interface. However, when the interface lines of constant volume fraction,
, are compared, the two distributions of interfaces are in very good agreement.
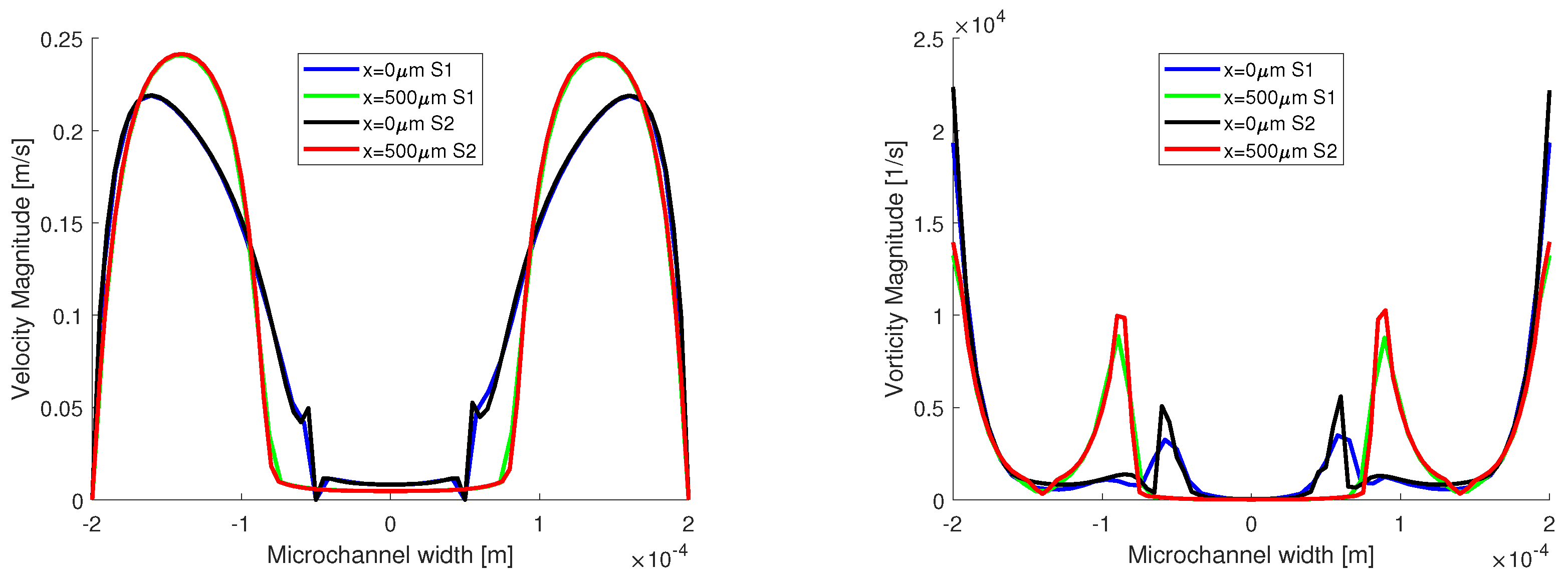
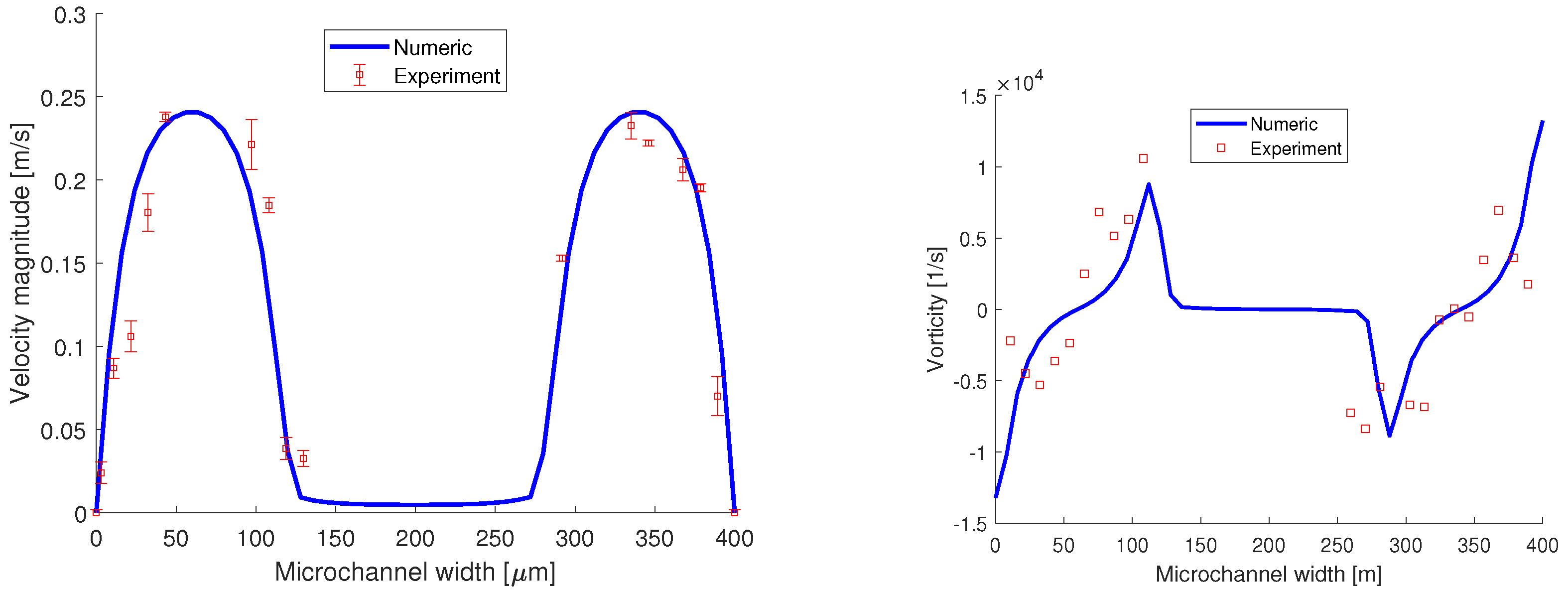
In
Figure 7, the distributions of velocity and vorticity magnitude are presented. The evolution of the velocity distribution from the entrance of the flow in the main channel to 500
m away from the junction is presented. At the 500
mark in the channel, the flow is fully developed, and it has a parabolic distribution for the aqueous phase.
Concerning the vorticity distribution, we wanted to showcase the spikes in vorticity at the interface between the two fluids, and spikes that are comparable with the values of the vorticity magnitude at the wall, when the flow is fully developed. For the velocity distributions, the two numerical simulations match very well. However, a small difference is reported for the vorticity distributions, and the vorticity has a higher magnitude in the S2 simulation both near the wall and at the interface.
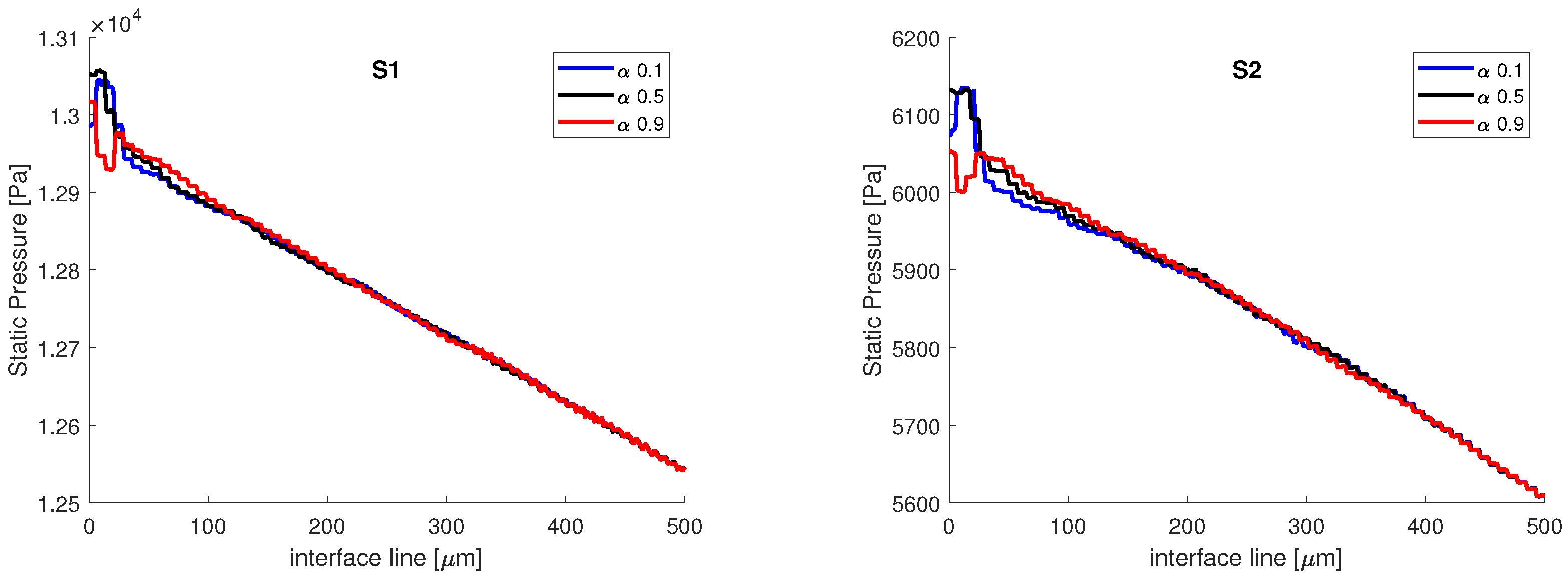
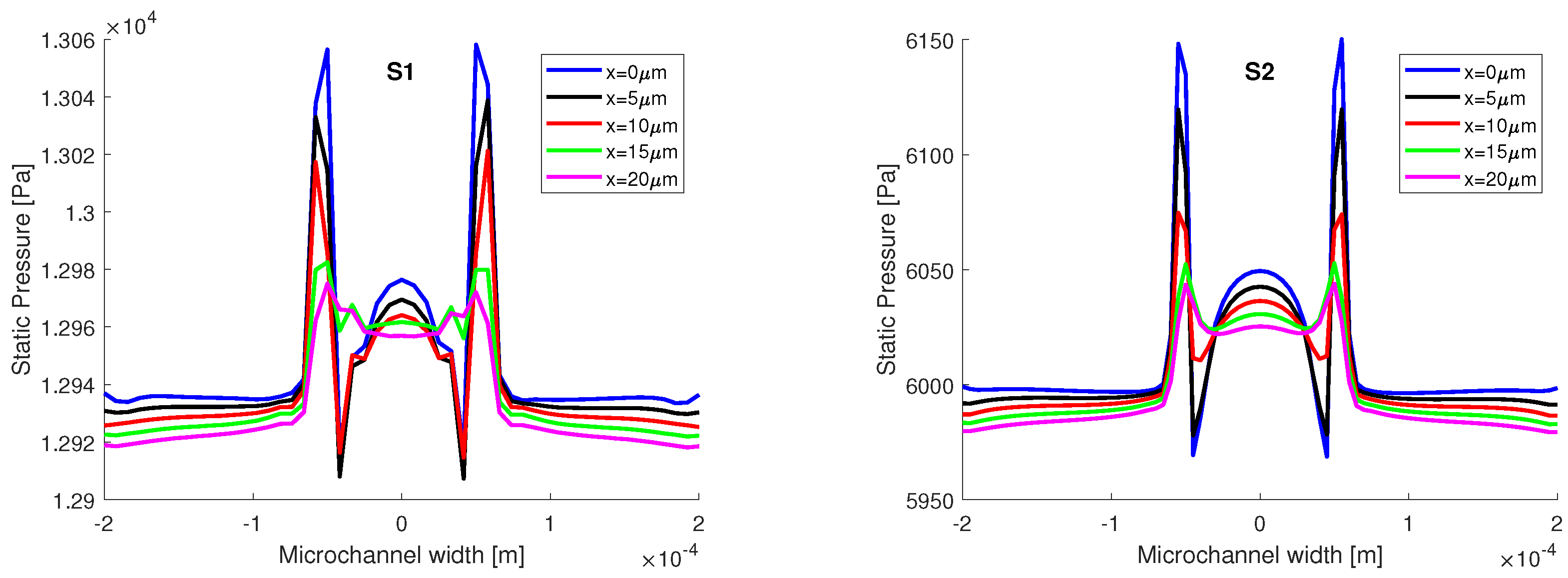
In
Figure 8, the static pressure variation on the interface lines of constant volume fraction is presented. The two distributions have the same aspect, with the same pressure variation in the vicinity of the junction on all three lines, and the same pressure drop, from
to
,
Pa. The interface is band, from
to
, and the values in static pressure match on all three volume fractions after 100
; therefore, the variations in static pressure recorded in the vicinity of the junction are mainly induced by the curvature of the interface, in accordance with the Laplace equation. We also remark that the influence of the contact angle wetting might be important since the contact/wetting angle has influence over the local interface curvature, as it will be shown in the following section. However, the main difference between the two numerical simulations comes in terms of the magnitude of the static pressure, as the values obtained from the S1 simulation are ≈two times higher than the values obtained from the S2 simulation. The difference in static pressure does not come from the mesh, but from the different algorithms used to couple the velocity with pressure. In the explicit simulation, the PISO algorithm was used, an algorithm that is recommended for transient flows. In the implicit simulation, the SIMPLE algorithm was used, since for PISO, the implicit simulation was diverging very rapidly.
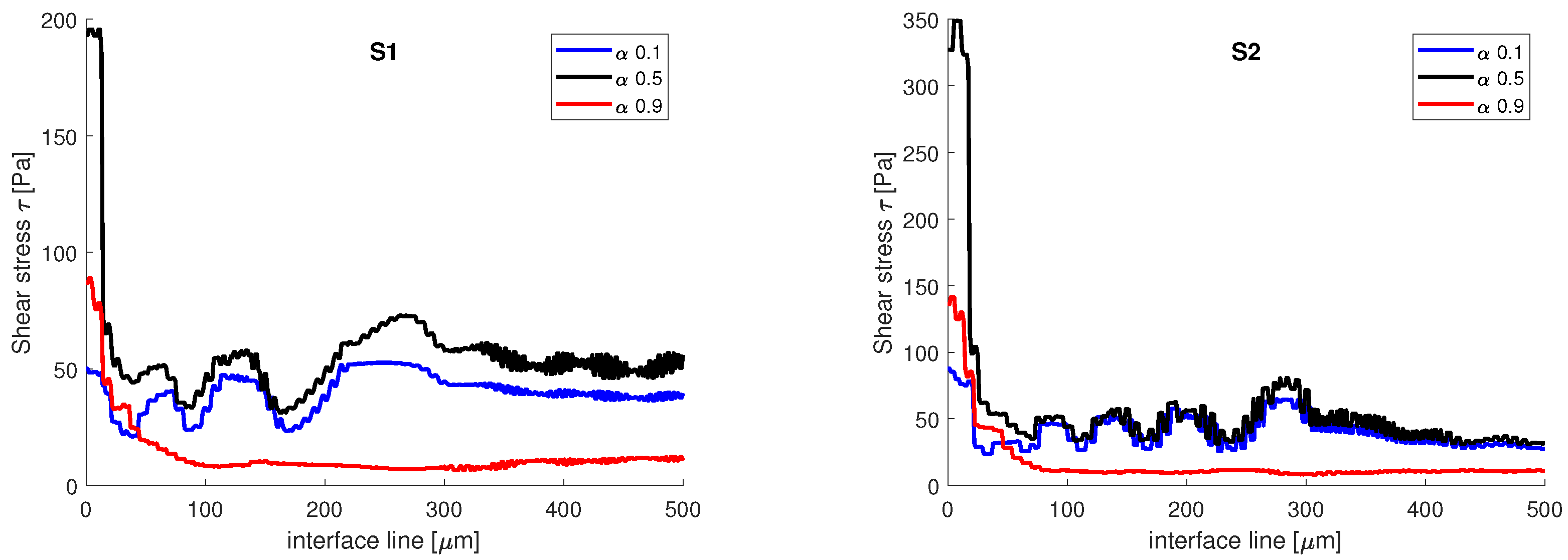
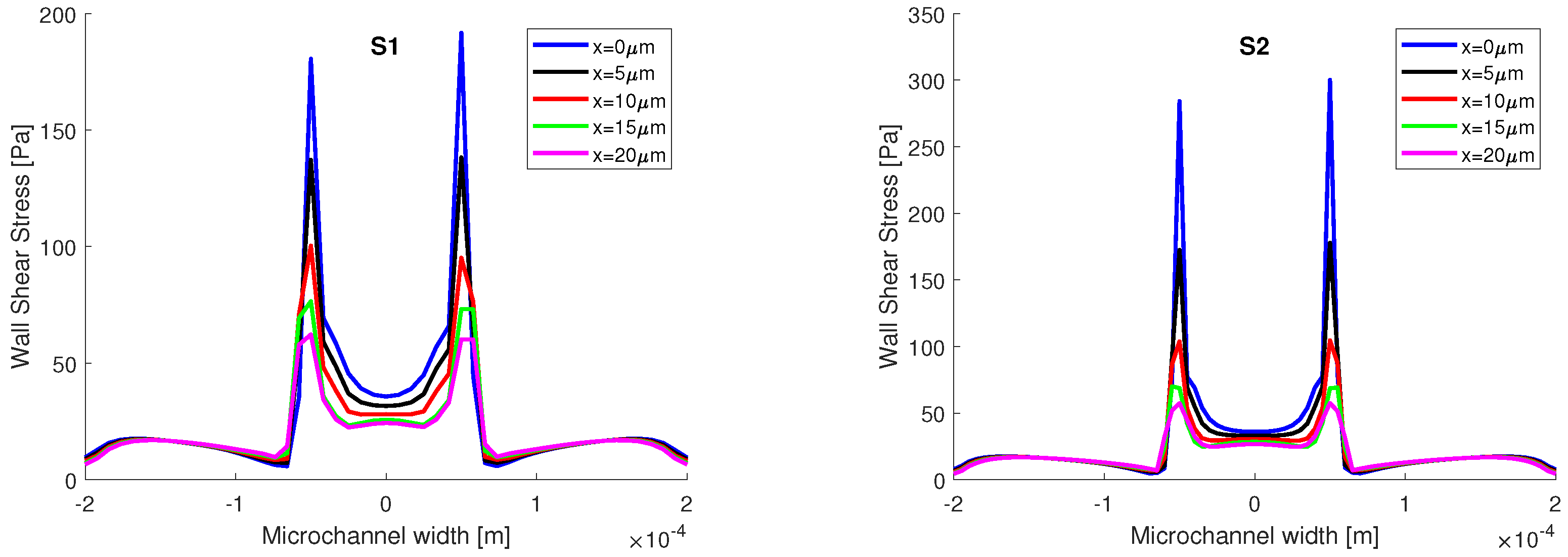
Then, on the same three-interface lines of constant volume fraction, the shear stress is analyzed. The shear stress is defined as:
where
is the strain rate. In
Figure 9, the variation of the shear stress is presented. In both simulations, the shear stress recorded on the interface line, when
, has the highest variations. There is a slight difference between the two numerical simulations, in terms of the magnitude of the shear stress. In the vicinity of the aqueous phase, when
, the values obtained at the interface for shear stress are higher than the values obtained in the vicinity of the oil phase, when
. This can be explained by the amount of space that each phase occupies in the channel. The oil phase has a Reynolds number equal to
, when the transition is made from the central channel to the main channel, the flowing surface expands and the velocity decreases; as such, the velocity gradients are smaller. Opposed to that is the aqueous phase which enters from the side channel into the main channel with a Reynolds number equal to 7. The flowing surface is shrunk, the velocity increases, and the gradients recorded are higher.
Given that the highest variations in static pressure and shear stress were recorded in the proximity of the junction, in the first 20 , they are further analyzed on five perpendicular lines to the flow field, at for static pressure, and at for the shear stress (on the top wall).
In
Figure 10, the static pressure distributions are compared. As stated before, there is a difference between the two numerical simulations, the magnitude of the static pressure from S1 is almost two times larger than the magnitude of static pressure from S2. However, in both distributions, the pressure jump is recorded at the junction, meaning that the interface has a curvature. Approximating the oil phase with a cylinder, the principal radii of curvature can be determined from Laplace pressure:
where the curvature
is reduced to
, at some distance from the junction, with
going towards infinity after some distance from the junction. We must remark that, in the near vicinity of the junction, the two radii of curvature have finite values, which determined the pressure variations represented in
Figure 8. From the numerical simulations, we obtain the following pressure differences: for S1
Pa and S2
Pa, the curvature radii obtained from the numerical simulations are
and
.
In
Figure 11, the distribution of the shear stress is presented on five lines on the top wall,
, from the junction with step of 5
to 20
away from the junction. In both simulations, the spikes of shear stress are recorded in the presence of the interface, and since the sunflower oil is more viscous than water, the values of shear stress are higher in the oil phase. There are differences between the two numerical simulations, and in the areas where the extreme values occur, higher values are recorded in the S2 simulation.
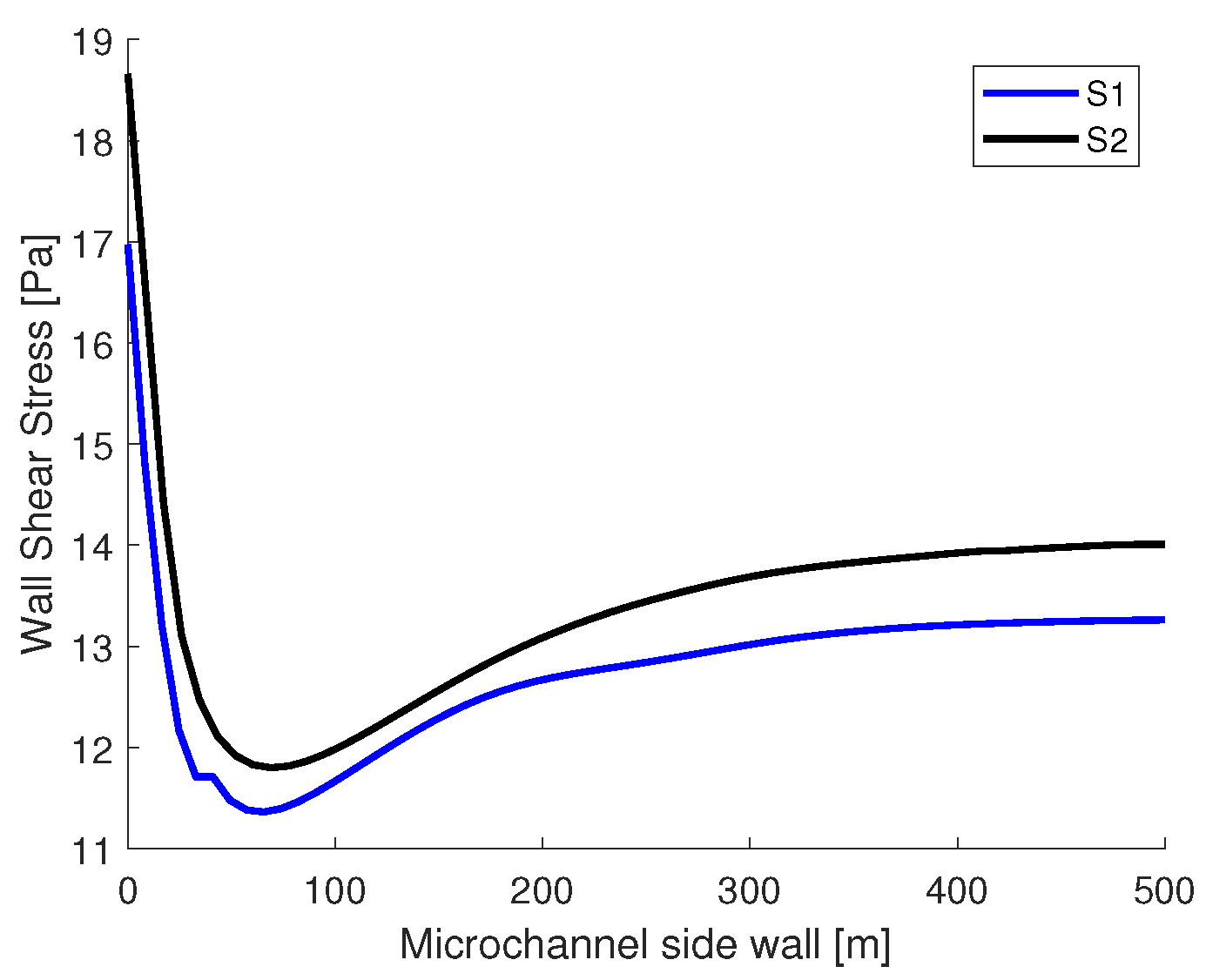
In
Figure 12, the shear stress distribution is presented on the sidewall of the main channel at
, starting from the junction to 500
. In both simulations, the highest values of shear stress are recorded at the junction. The sudden drop in magnitude after the junction can be explained by the presence of the curved interface. At the 500
mark, the interface is straight, the pressure in the oil phase is equal to the pressure from the aqueous phase, and the shear stress distributions tend towards a constant value.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}