
Diffraction Efficiency of MEMS Phase Light Modulator, TI-PLM, for Quasi-Continuous and Multi-Point Beam Steering


Abstract
:1. Introduction
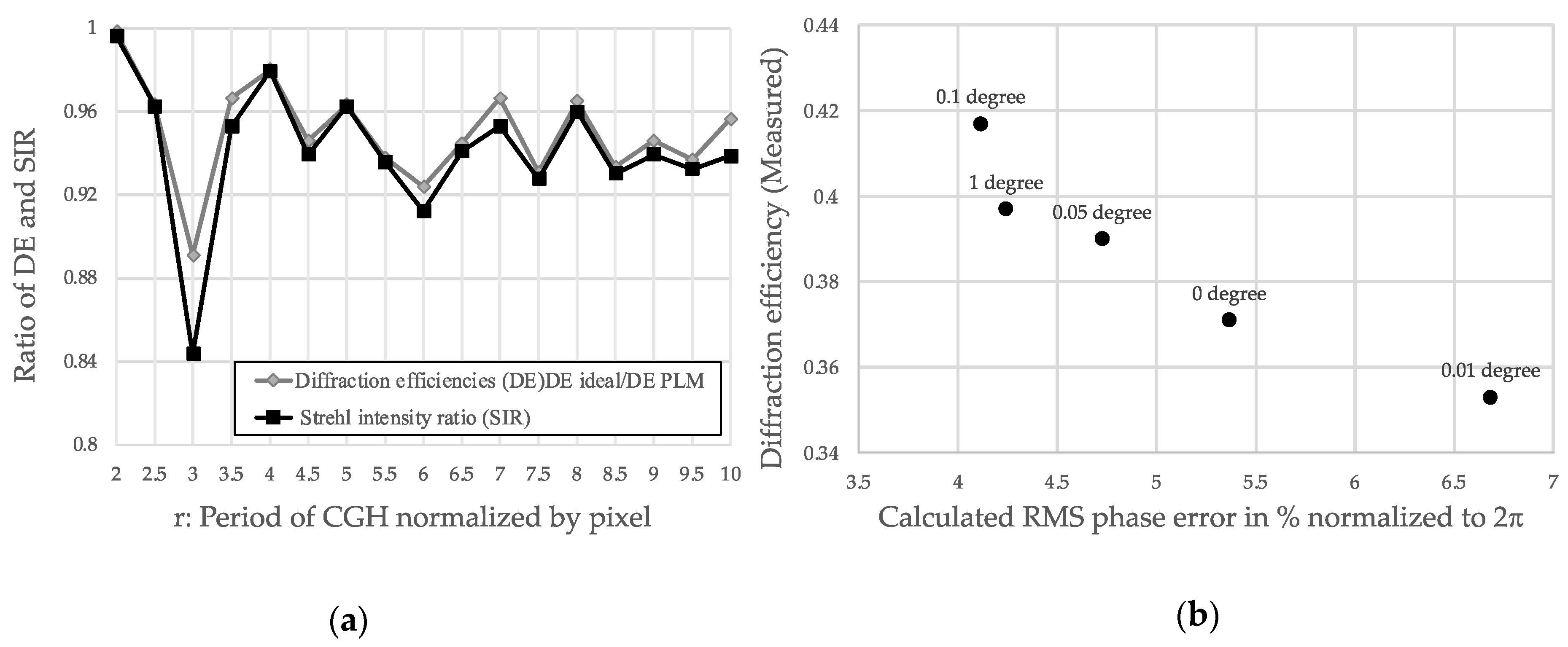
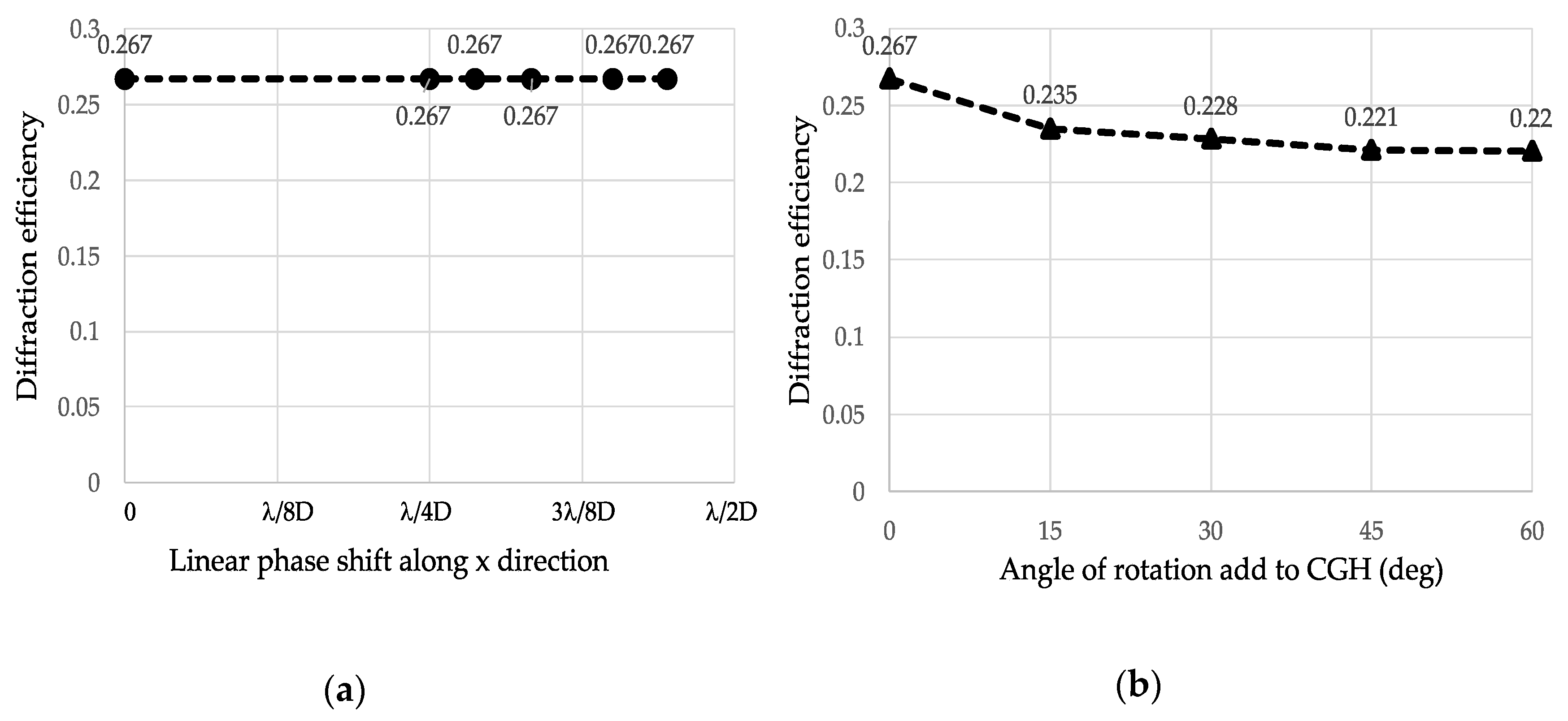
2. Effect of Non-Linearly Distributed Phase Levels for Quasi-Continuous and Single Point Beam Steering
Diffraction Efficiency of TI-PLM
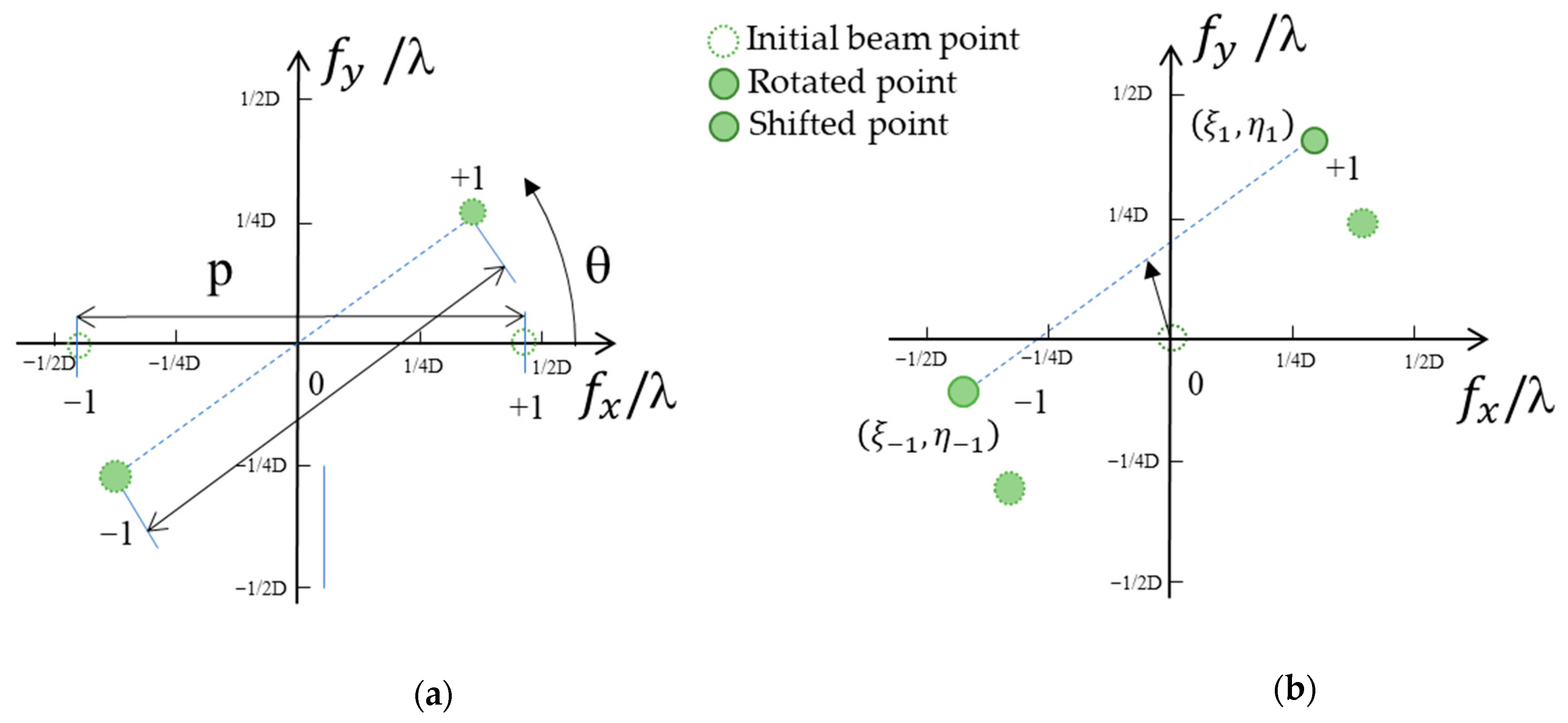
3. Quasi-Continuous and Two-Point Beam Steering
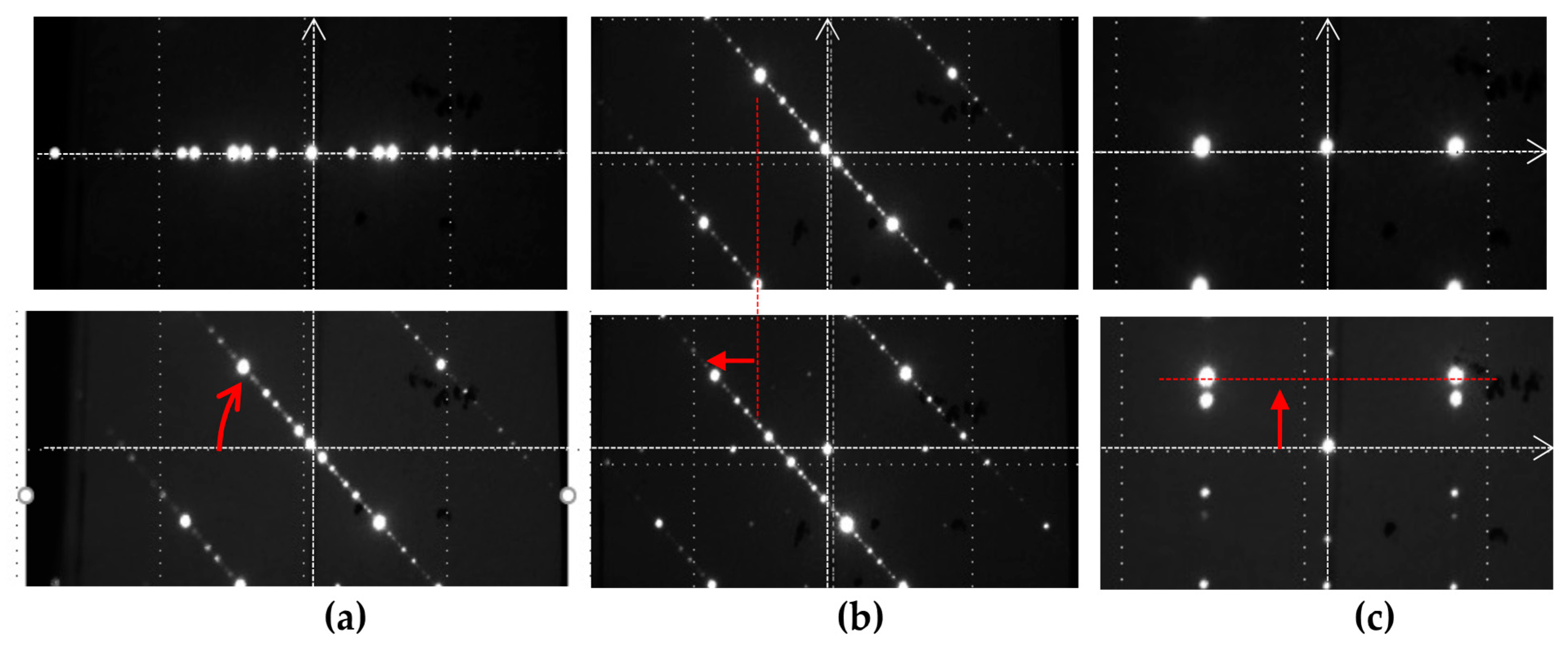
3.1. Quasi-Continuous and Two-Point Beam Steering by Using Binary Gratings
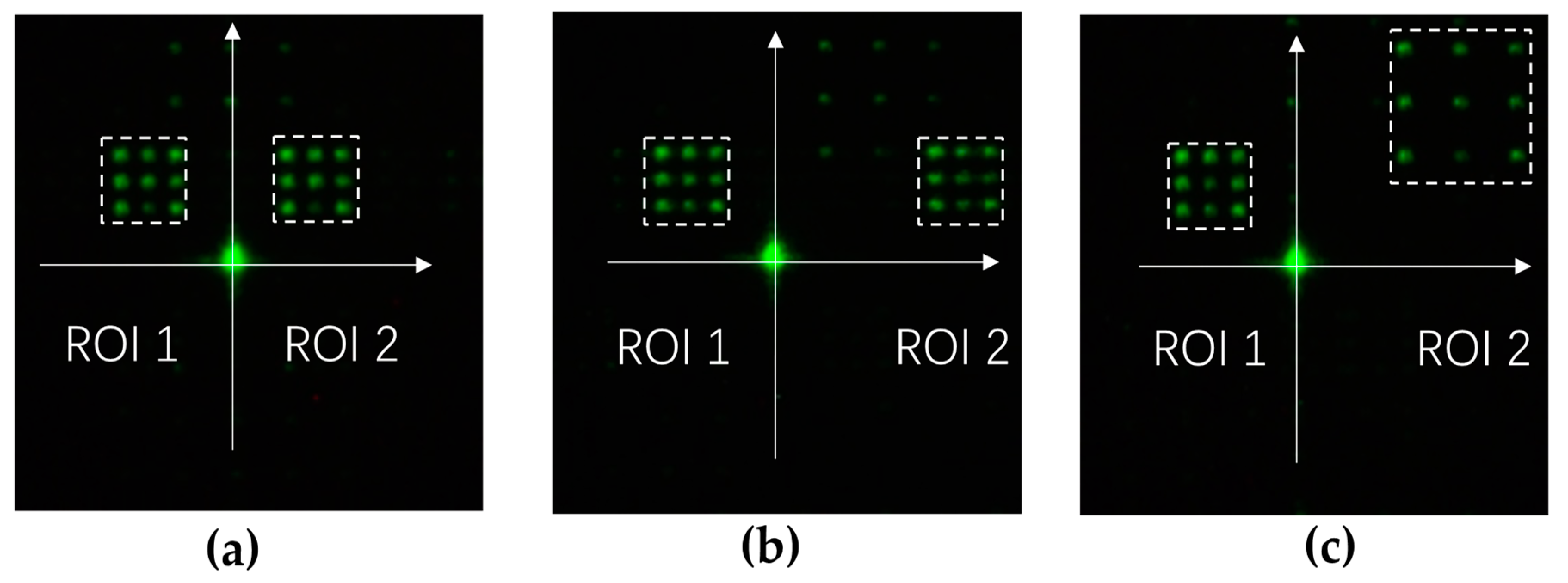
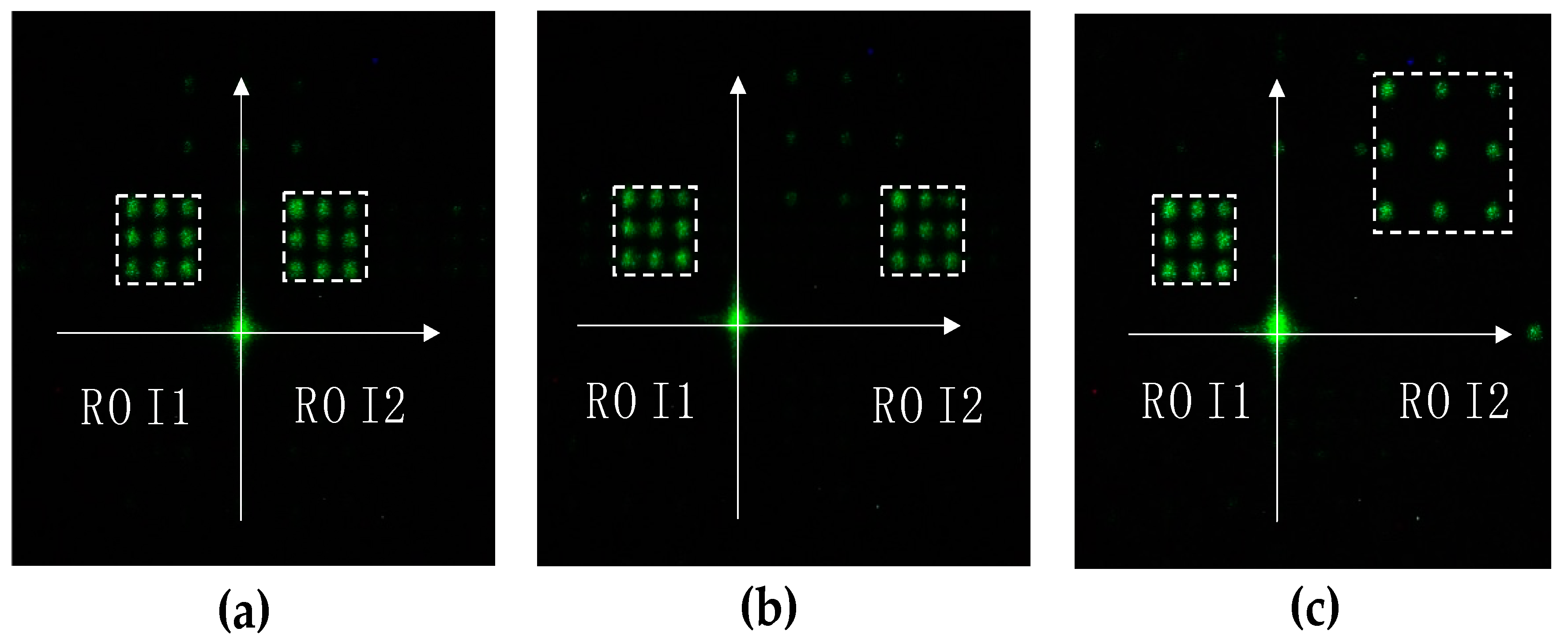
3.2. Quasi-Continuous and Two-Point Beam Steering by Complex Field Addition
4. Discussion
5. Summary
Author Contributions
Funding
Conflicts of Interest
References
- Marom, E.; Konforti, N. Dynamic optical interconnections. Opt. Lett. 1987, 12, 539–541. [Google Scholar] [CrossRef] [PubMed]
- O’Brien, D.C.; Mears, R.J.; Wilkinson, T.D.; Crossland, W.A. Dynamic holographic interconnects that use ferroelectric liquid-crystal spatial light modulators. Appl. Opt. 1994, 33, 2795–2803. [Google Scholar] [CrossRef] [PubMed]
- Haellstig, E.; Stigwall, J.; Lindgren, M.; Sjoqvist, L. Laser beam steering and tracking using a liquid crystal spatial light modulator. Proc. SPIE 2003, 5087, 13–23. [Google Scholar] [CrossRef]
- Reicherter, M.; Haist, T.; Wagemann, E.U.; Tiziani, H.J. Optical particle trapping with computer-generated holograms written on a liquid-crystal display. Opt. Lett. 1999, 24, 608–610. [Google Scholar] [CrossRef] [PubMed]
- Schmitz, C.H.J.; Spatz, J.P.; Curtis, J.E. High-precision steering of multiple holographic optical traps. Opt. Express 2005, 13, 8678–8685. [Google Scholar] [CrossRef] [PubMed]
- Takashima, Y.; Hellman, B. Review paper: Imaging lidar by digital micromirror device. Opt. Rev. 2020, 27, 400–408. [Google Scholar] [CrossRef]
- Sun, C.; Zhang, B.; Zha, S.; Yuan, Z.; Lu, J. High-Efficiency Beam Steering LCOS for Wavelength Selective Switch. IEEE Photon. Technol. Lett. 2018, 30, 1683–1686. [Google Scholar] [CrossRef]
- Yang, D.K.; Wu, S.T. Fundamentals of Liquid Crystal Devices; Lowe, A.C., Sage, I., Eds.; John Wiley & Sons: New York, NY, USA, 2006. [Google Scholar]
- Mirrorcle Technologies Inc. Mirrorcle Technologies MEMS Mirrors—Technical Overview. Available online: https://www.mirrorcletech.com/pdf/Mirrorcle%20Technologies%20MEMS%20Mirrors%20-%20Technical%20Overview.pdf (accessed on 17 June 2022).
- DLP7000 Datasheet. Available online: https://www.ti.com/product/DLP7000 (accessed on 17 June 2022).
- Hellman, B.; Gin, A.; Smith, B.; Kim, Y.-S.; Chen, G.; Winkler, P.; McCann, P.; Takashima, Y. Wide-angle MEMS-based imaging lidar by decoupled scan axes. Appl. Opt. 2019, 59, 28–37. [Google Scholar] [CrossRef] [PubMed]
- Hellman, B.; Luo, C.; Chen, G.; Rodriguez, J.; Perkins, C.; Park, J.-H.; Takashima, Y. Single-chip holographic beam steering for lidar by a digital micromirror device with angular and spatial hybrid multiplexing. Opt. Express 2020, 28, 21993. [Google Scholar] [CrossRef] [PubMed]
- Bartlett, T.A.; McDonald, W.C.; Hall, J.N. Adapting Texas Instruments DLP technology to demonstrate a phase spatial light modulator. Proc. SPIE 2019, 10932, 161–173. [Google Scholar] [CrossRef]
- Goodman, J.W. Introduction to Fourier Optics, 3rd ed.; McGraw-Hill: New York, NY, USA, 2004. [Google Scholar]
- Bartlett, T.A.; McDonald, W.C.; Hall, J.N.; Oden, P.I.; Doane, D.; Ketchum, R.S.; Byrum, T. Recent advances in the development of the Texas Instruments phase-only microelectromechanical systems (MEMS) spatial light modulator. Proc. SPIE 2021, 11698, 103–116. [Google Scholar] [CrossRef]
- Ketchum, R.; Blanche, P.-A. Diffraction Efficiency Characteristics for MEMS-Based Phase-Only Spatial Light Modulator with Nonlinear Phase Distribution. Photonics 2021, 8, 62. [Google Scholar] [CrossRef]
- Hällstig, E.; Sjöqvist, L.; Lindgren, M. Intensity variations using a quantized spatial light modulator for nonmechanical beam steering. Opt. Eng. 2003, 42, 613–619. [Google Scholar] [CrossRef]
- Gerchberg, R.W.; Saxton, W.O. A Practical Algorithm for the Determination of Phase from Image and Diffraction Plane Pictures. Optik 1972, 35, 237–246. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pattern | Binary π-Phase Grating | Complex Field Addition | ||||
|---|---|---|---|---|---|---|
| ROI 1 | ROI 2 | Total | ROI 1 | ROI 2 | Total | |
| (a) | 0.1641 | 0.1629 | 0.3270 | 0.1638 | 0.1600 | 0.3238 |
| (b) | 0.1710 | 0.1285 | 0.2995 | 0.1748 | 0.1275 | 0.3023 |
| (c) | 0.1641 | 0.0992 | 0.2633 | 0.1609 | 0.1102 | 0.2712 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deng, X.; Tang, C.-I.; Luo, C.; Takashima, Y. Diffraction Efficiency of MEMS Phase Light Modulator, TI-PLM, for Quasi-Continuous and Multi-Point Beam Steering. Micromachines 2022, 13, 966. https://doi.org/10.3390/mi13060966
Deng X, Tang C-I, Luo C, Takashima Y. Diffraction Efficiency of MEMS Phase Light Modulator, TI-PLM, for Quasi-Continuous and Multi-Point Beam Steering. Micromachines. 2022; 13(6):966. https://doi.org/10.3390/mi13060966
Chicago/Turabian StyleDeng, Xianyue, Chin-I Tang, Chuan Luo, and Yuzuru Takashima. 2022. "Diffraction Efficiency of MEMS Phase Light Modulator, TI-PLM, for Quasi-Continuous and Multi-Point Beam Steering" Micromachines 13, no. 6: 966. https://doi.org/10.3390/mi13060966