
Efficient Modeling and Simulation of PMUT Arrays in Various Ambients

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Single PMUT: Full- and Reduced-Order Modeling
2.1. Analysis on PMUTs in Vacuum
2.2. A Single PMUT Immersed in Water
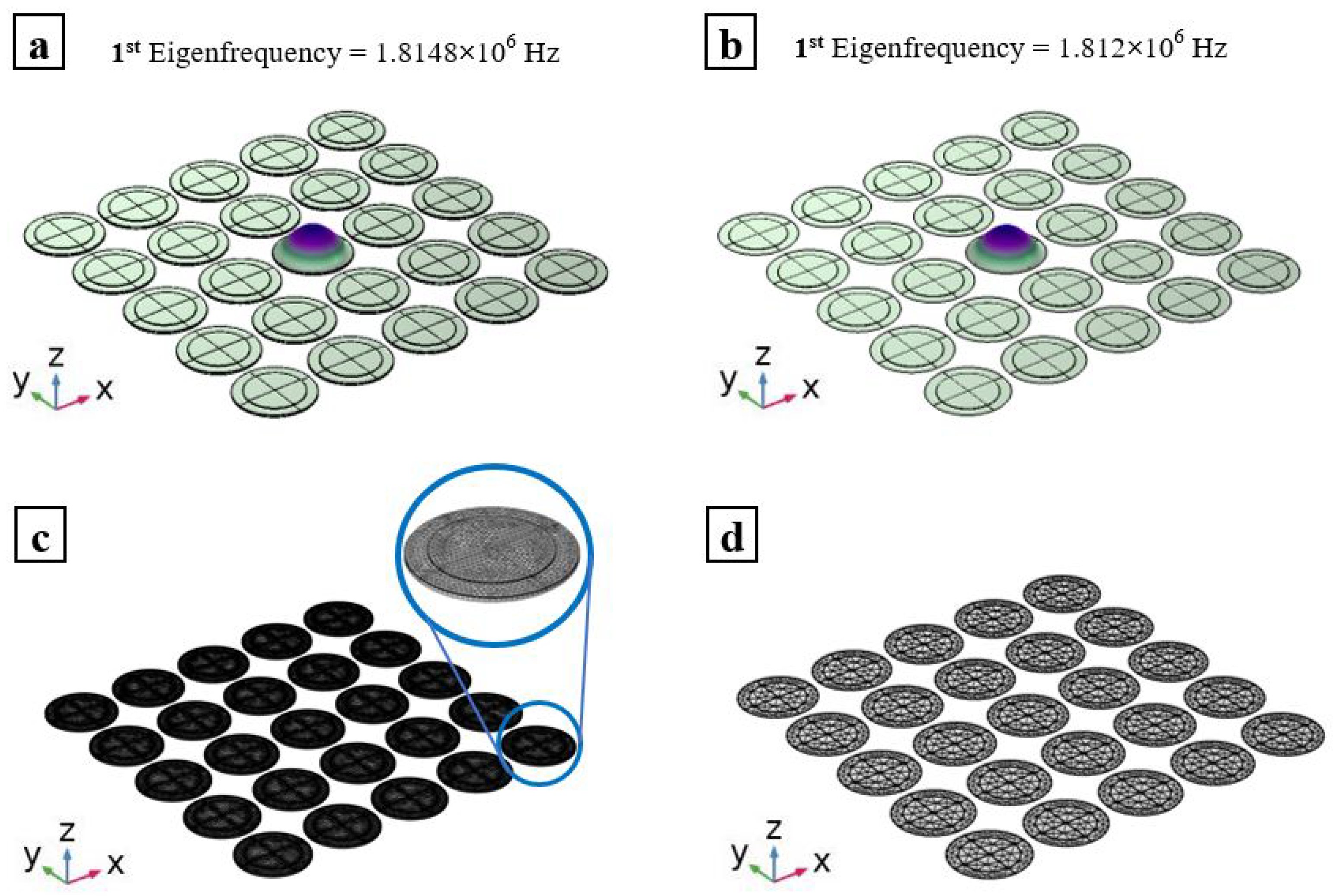
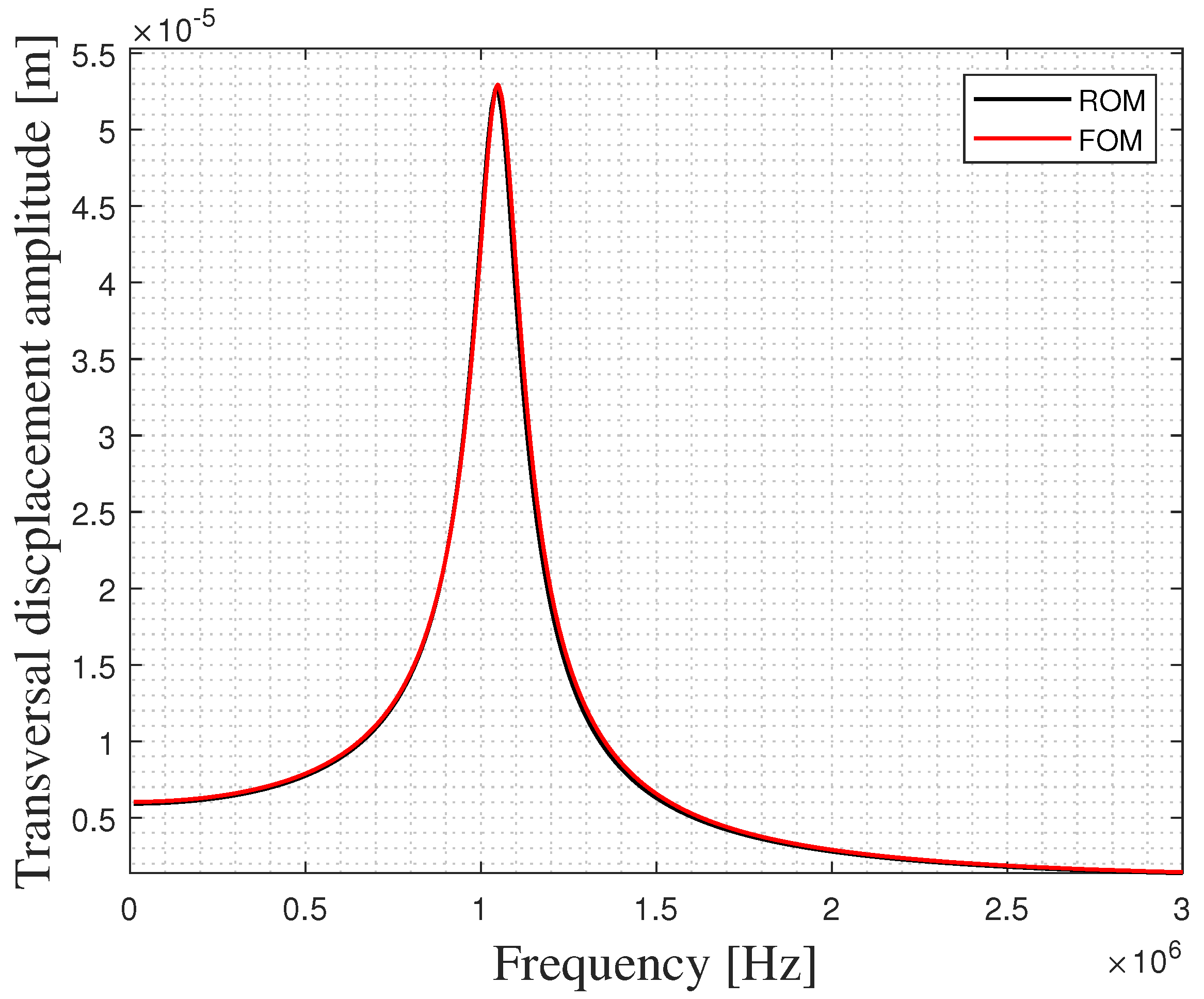
3. Array of PMUT: Efficient Modeling via ROM
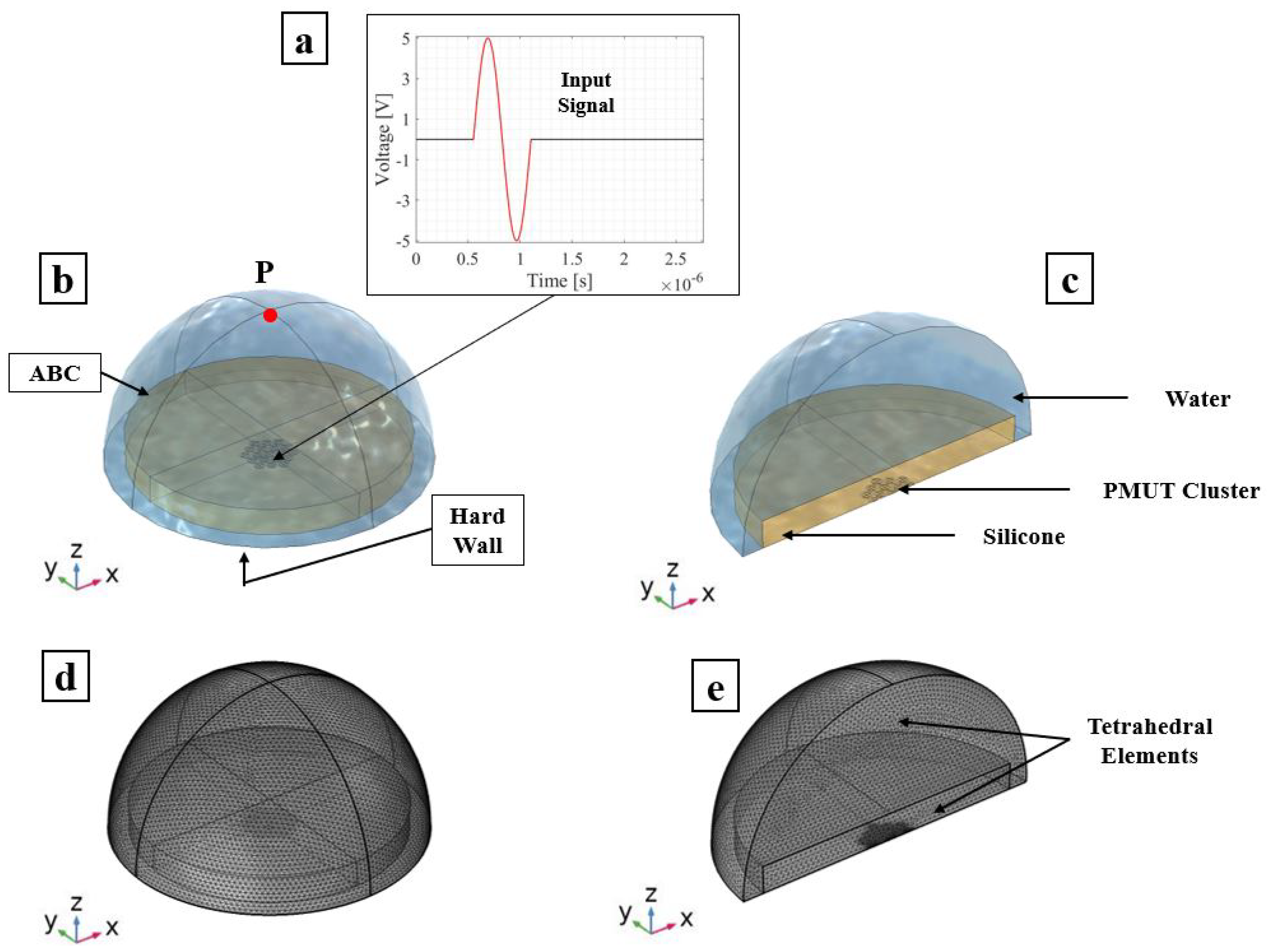
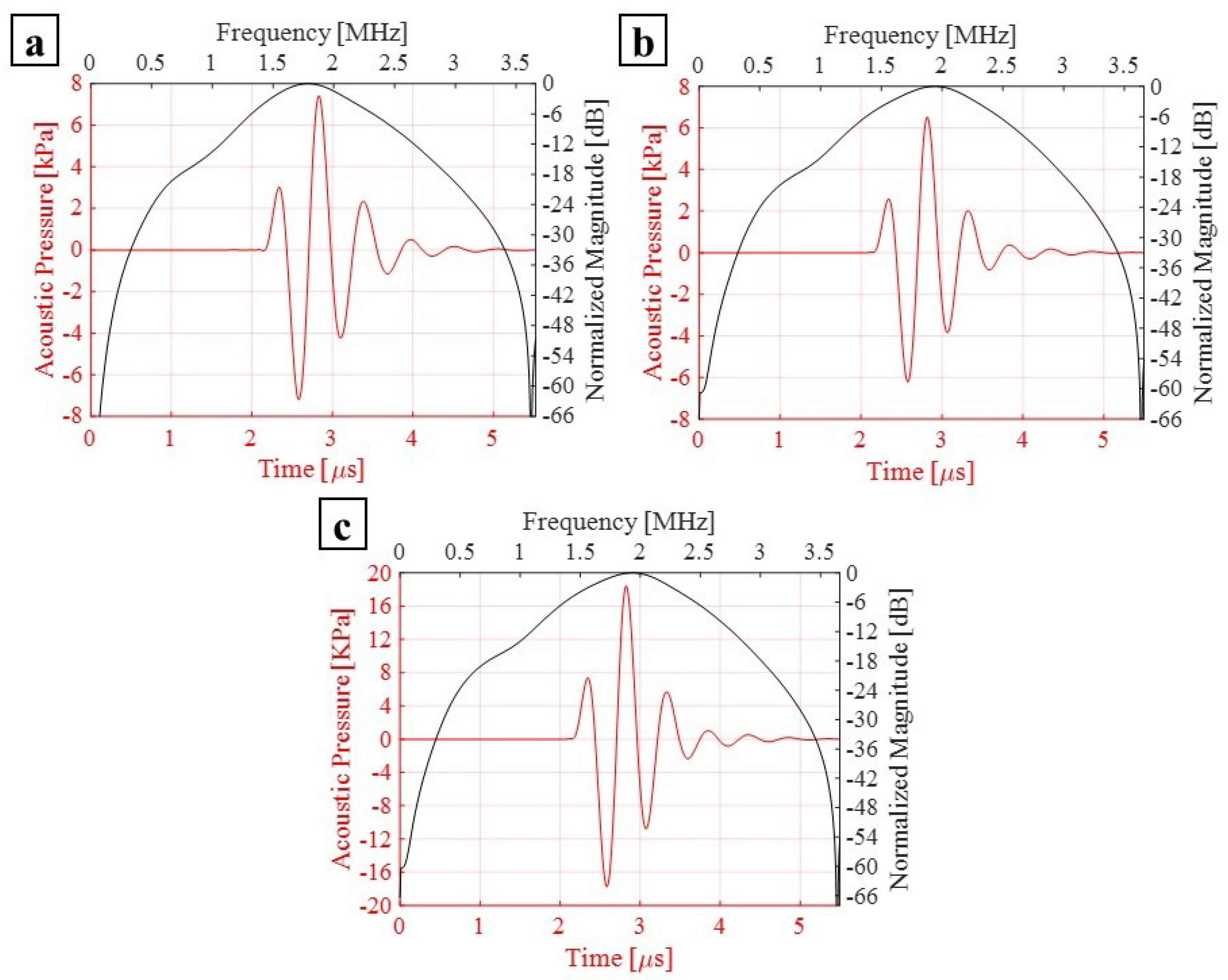
3.1. Transmission Phase
3.2. Reception Phase
4. Experimental Validation
5. Closing Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABC | Absorbing Boundary Condition |
| ASI | Acoustic–Structural Interaction |
| CPU | Central Processing Unit |
| DOF | Degrees of Freedom |
| FBW | Fractional Bandwidth |
| FOM | Full-Order Model |
| FSDT | First Order Shear Deformation Theory |
| HW | Hard Wall Boundary Condition |
| MEMS | Micro-Electro-Mechanical Systems |
| MOR | Model Order Reduction |
| MUTs | Micromachined Ultrasonic Transducers |
| PMUTs | Piezoelectric Micromachined Ultrasonic Transducers |
| RAM | Random-Access Memory |
| ROM | Reduced-Order Modeling |
References
- Corigliano, A.; Ardito, R.; Comi, C.; Frangi, A.; Ghisi, A.; Mariani, S. Mechanics of Microsystems; John Wiley & Sons: Hoboken, NJ, USA, 2018. [Google Scholar]
- Massimino, G.; Colombo, A.; Ardito, R.; Quaglia, F.; Corigliano, A. On the effects of package on the PMUTs performances—Multiphysics model and frequency analyses. Micromachines 2020, 11, 307. [Google Scholar] [CrossRef] [PubMed]
- Massimino, G.; Lazarova, B.; Quaglia, F.; Corigliano, A. Air-coupled PMUTs array with residual stresses: Experimental tests in the linear and non-linear dynamic regime. Int. J. Smart Nano Mater. 2020, 11, 387–399. [Google Scholar] [CrossRef]
- Massimino, G.; Colombo, A.; Ardito, R.; Quaglia, F.; Corigliano, A. Piezo-micro-ultrasound-transducers for air-coupled arrays: Modeling and experiments in the linear and non-linear regimes. Extrem. Mech. Lett. 2020, 40, 100968. [Google Scholar] [CrossRef]
- Massimino, G.; Colombo, A.; D’Alessandro, L.; Procopio, F.; Ardito, R.; Ferrera, M.; Corigliano, A. Multiphysics modelling and experimental validation of an air-coupled array of PMUTs with residual stresses. J. Micromech. Microeng. 2018, 28, 054005. [Google Scholar] [CrossRef]
- Massimino, G.; Quaglia, F.; Corigliano, A.; Frangi, A. Model order reduction for the analysis of large arrays of piezoelectric micromachined ultrasonic transducers in water. Appl. Acoust. 2021, 182, 108231. [Google Scholar] [CrossRef]
- Chen, X.; Xu, J.; Chen, H.; Ding, H.; Xie, J. High-accuracy ultrasonic rangefinders via pMUTs arrays using multi-frequency continuous waves. J. Microelectromech. Syst. 2019, 28, 634–642. [Google Scholar] [CrossRef]
- Chiu, Y.; Wang, C.; Gong, D.; Li, N.; Ma, S.; Jin, Y. A Novel Ultrasonic TOF Ranging System Using AlN Based PMUTs. Micromachines 2021, 12, 284. [Google Scholar] [CrossRef] [PubMed]
- Jiang, X.; Lu, Y.; Tang, H.Y.; Tsai, J.M.; Ng, E.J.; Daneman, M.J.; Boser, B.E.; Horsley, D.A. Monolithic ultrasound fingerprint sensor. Microsyst. Nanoeng. 2017, 3, 17059. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ji, W.; Liu, L.; Xing, Z.; Zhang, D.; Wang, Y.; Chen, L.; Chen, Y.; Sun, X.; Du, Y. Total-focus ultrasonic imaging of defects in solids using a PZT piezoelectric micromachined ultrasonic transducer array. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2020, 68, 1380–1386. [Google Scholar] [CrossRef] [PubMed]
- Zamora, I.; Ledesma, E.; Uranga, A.; Barniol, N. Monolithic single PMUT-on-CMOS ultrasound system with+ 17 dB SNR for imaging applications. IEEE Access 2020, 8, 142785–142794. [Google Scholar] [CrossRef]
- Herrera, B.; Pop, F.; Cassella, C.; Rinaldi, M. AlN PMUT-based ultrasonic power transfer links for implantable electronics. In Proceedings of the 2019 20th International Conference on Solid-State Sensors, Actuators and Microsystems & Eurosensors XXXIII (Transducers & Eurosensors XXXIII), Berlin, Germany, 23–27 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 861–864. [Google Scholar]
- Shi, Q.; Wang, T.; Lee, C. MEMS based broadband piezoelectric ultrasonic energy harvester (PUEH) for enabling self-powered implantable biomedical devices. Sci. Rep. 2016, 6, 24946. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Massimino, G.; Colombo, A.; Ardito, R.; Quaglia, F.; Foncellino, F.; Corigliano, A. Air-coupled array of pmuts at 100 kHz with PZT active layer: Multiphysics model and experiments. In Proceedings of the 2019 20th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Hannover, Germany, 24–27 March 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Massimino, G.; D’Alessandro, L.; Procopio, F.; Ardito, R.; Ferrera, M.; Corigliano, A. Air-coupled PMUT at 100 kHz with PZT active layer and residual stresses: Multiphysics model and experimental validation. In Proceedings of the 2017 18th International Conference on Thermal, Mechanical and Multi-Physics Simulation and Experiments in Microelectronics and Microsystems (EuroSimE), Dresden, Germany, 3–5 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–4. [Google Scholar]
- Timoshenko, S.; Woinowsky-Krieger, S. Theory of Plates and Shells; McGraw-Hill: New York, NY, USA, 1959; Volume 2. [Google Scholar]
- Carrera, E.; Cinefra, M.; Petrolo, M.; Zappino, E. Finite Element Analysis of Structures through Unified Formulation; Wiley Online Library: Hoboken, NJ, USA, 2014. [Google Scholar]
- Massimino, G.; D’Alessandro, L.; Procopio, F.; Ardito, R.; Ferrera, M.; Corigliano, A. Multiphysics analysis and experimental validation of an air coupled piezoelectric micromachined ultrasonic transducer with residual stresses. Procedia Eng. 2016, 168, 852–855. [Google Scholar] [CrossRef]
- Chapelle, D.; Bathe, K.J. The Finite Element Analysis of Shells-Fundamentals; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Fujii, H.; Nakaya, C.; Takeuchi, H.; Kondo, T.; Ishikawa, Y. Acoustic properties of lens materials for ultrasonic probes. Jpn. J. Appl. Phys. 1995, 34, 312. [Google Scholar] [CrossRef]
- Spicci, L. FEM simulation for ‘pulse-echo’ performances of an ultrasound imaging linear probe. In Proceedings of the COMSOL Conference, Rotterdam, The Netherlands, 23–25 October 2013. [Google Scholar]
- Yang, Y.; Tian, H.; Wang, Y.F.; Shu, Y.; Zhou, C.J.; Sun, H.; Zhang, C.H.; Chen, H.; Ren, T.L. An Ultra-High Element Density pMUT Array with Low Crosstalk for 3-D Medical Imaging. Sensors 2013, 13, 9624–9634. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.Q.; Li, Y.X.; Chen, Y.; Ju, Z.Y.; Tao, L.Q.; Pang, Y.; Yang, Y.; Ren, T.L. Large-Scale and High-Density pMUT Array Based on Isolated Sol-Gel PZT Membranes for Fingerprint Imaging. J. Electrochem. Soc. 2017, 164, B377–B381. [Google Scholar] [CrossRef] [Green Version]























Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdalla, O.M.O.; Massimino, G.; Savoia, A.S.; Quaglia, F.; Corigliano, A. Efficient Modeling and Simulation of PMUT Arrays in Various Ambients. Micromachines 2022, 13, 962. https://doi.org/10.3390/mi13060962
Abdalla OMO, Massimino G, Savoia AS, Quaglia F, Corigliano A. Efficient Modeling and Simulation of PMUT Arrays in Various Ambients. Micromachines. 2022; 13(6):962. https://doi.org/10.3390/mi13060962
Chicago/Turabian StyleAbdalla, Omer M. O., Gianluca Massimino, Alessandro Stuart Savoia, Fabio Quaglia, and Alberto Corigliano. 2022. "Efficient Modeling and Simulation of PMUT Arrays in Various Ambients" Micromachines 13, no. 6: 962. https://doi.org/10.3390/mi13060962