
Robust Touch Screen Readout System to Display Noise Using Multireference Differential Sensing Scheme for Flexible AMOLED Display

Abstract
:1. Introduction
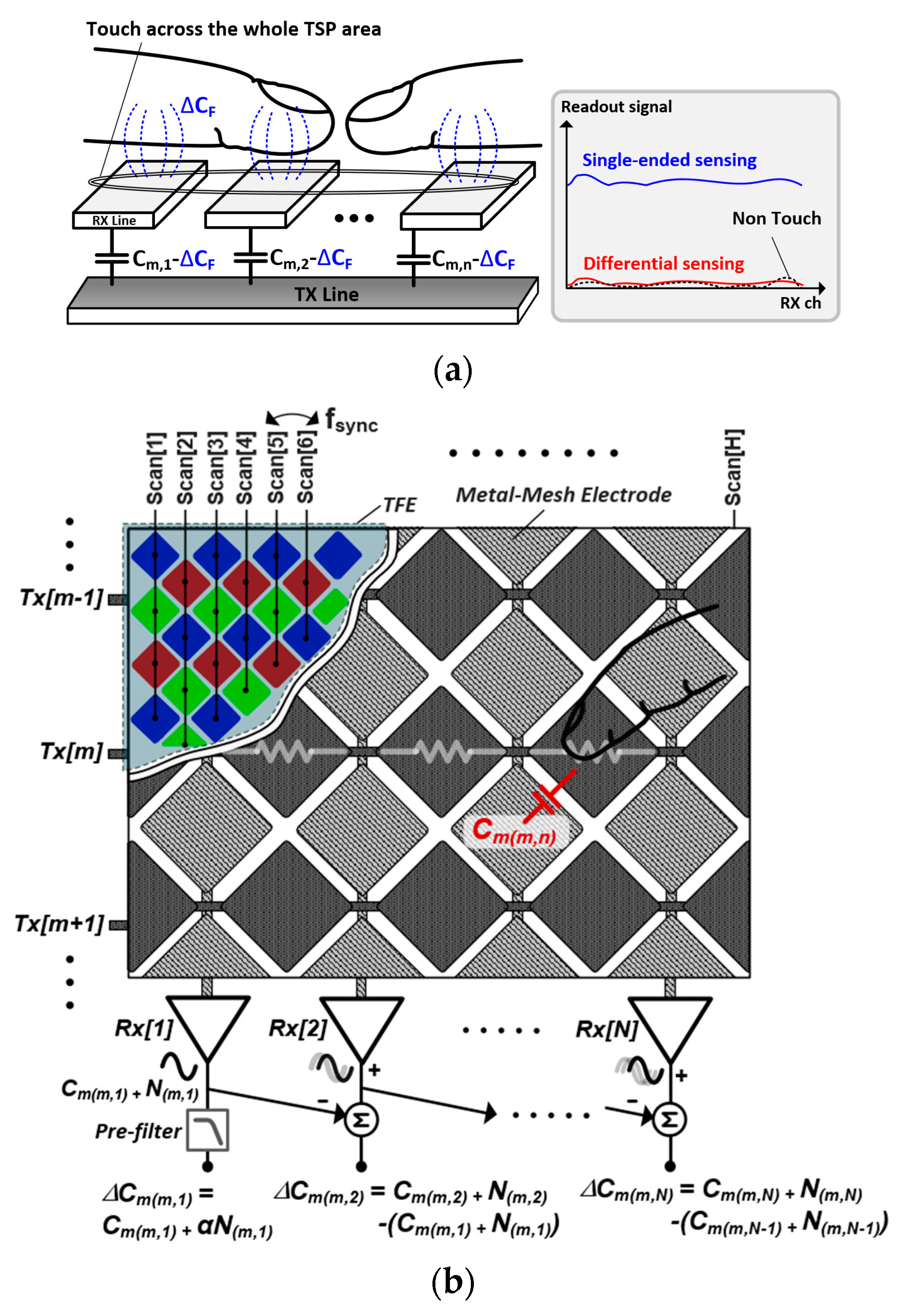
2. Differential Sensing Architecture
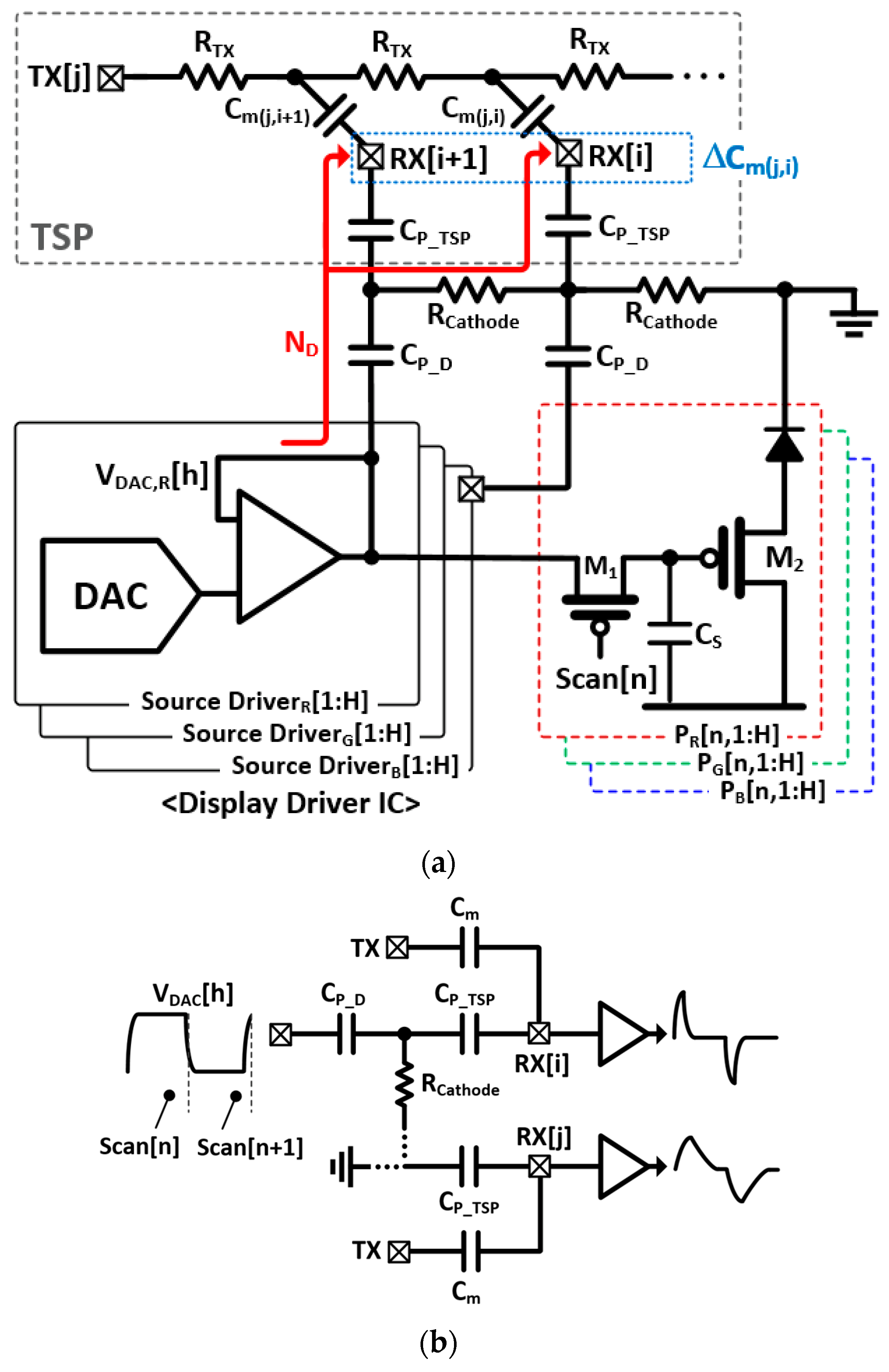
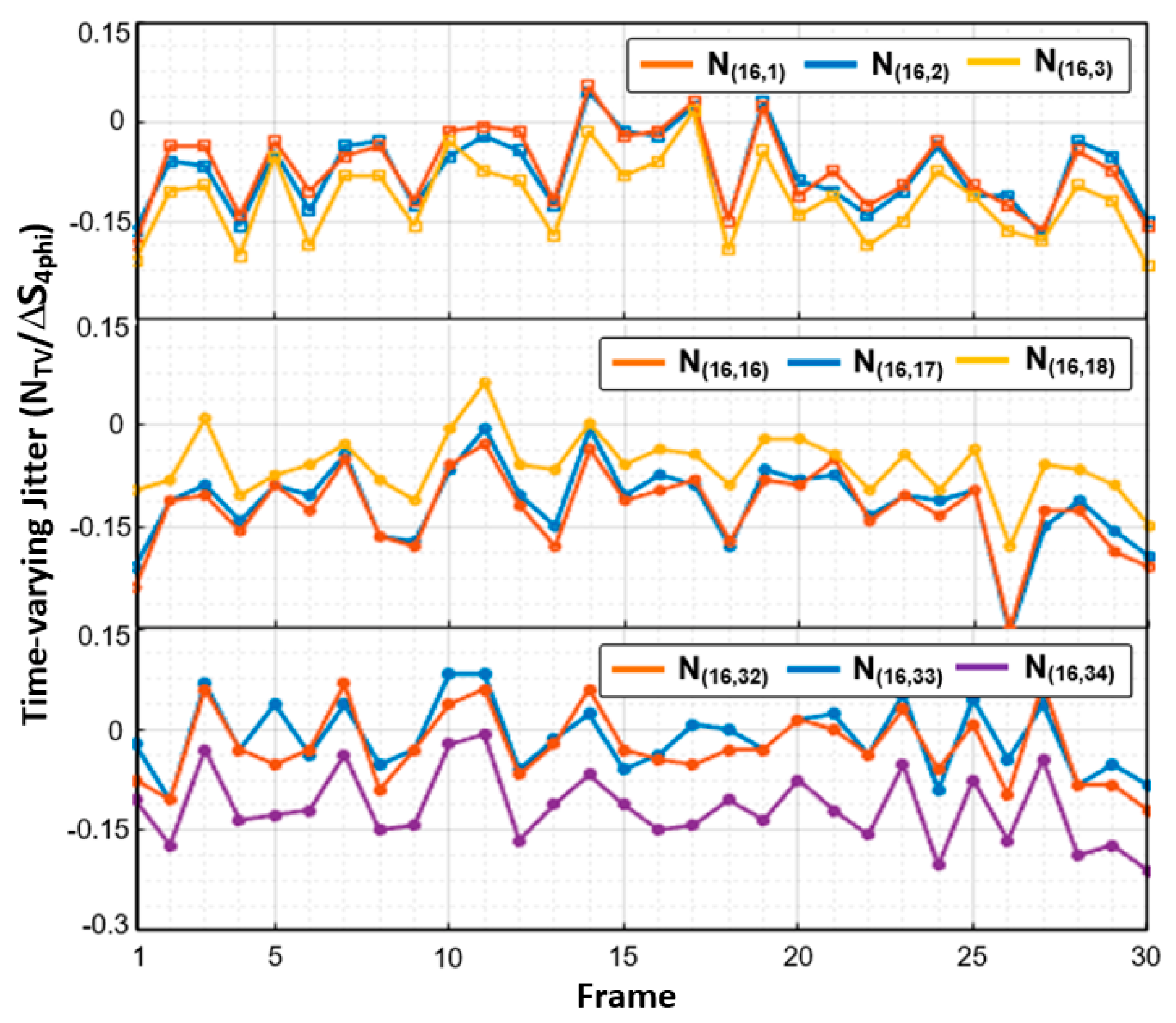
2.1. Circuit Model of Display Noise in Flexible AMOLED
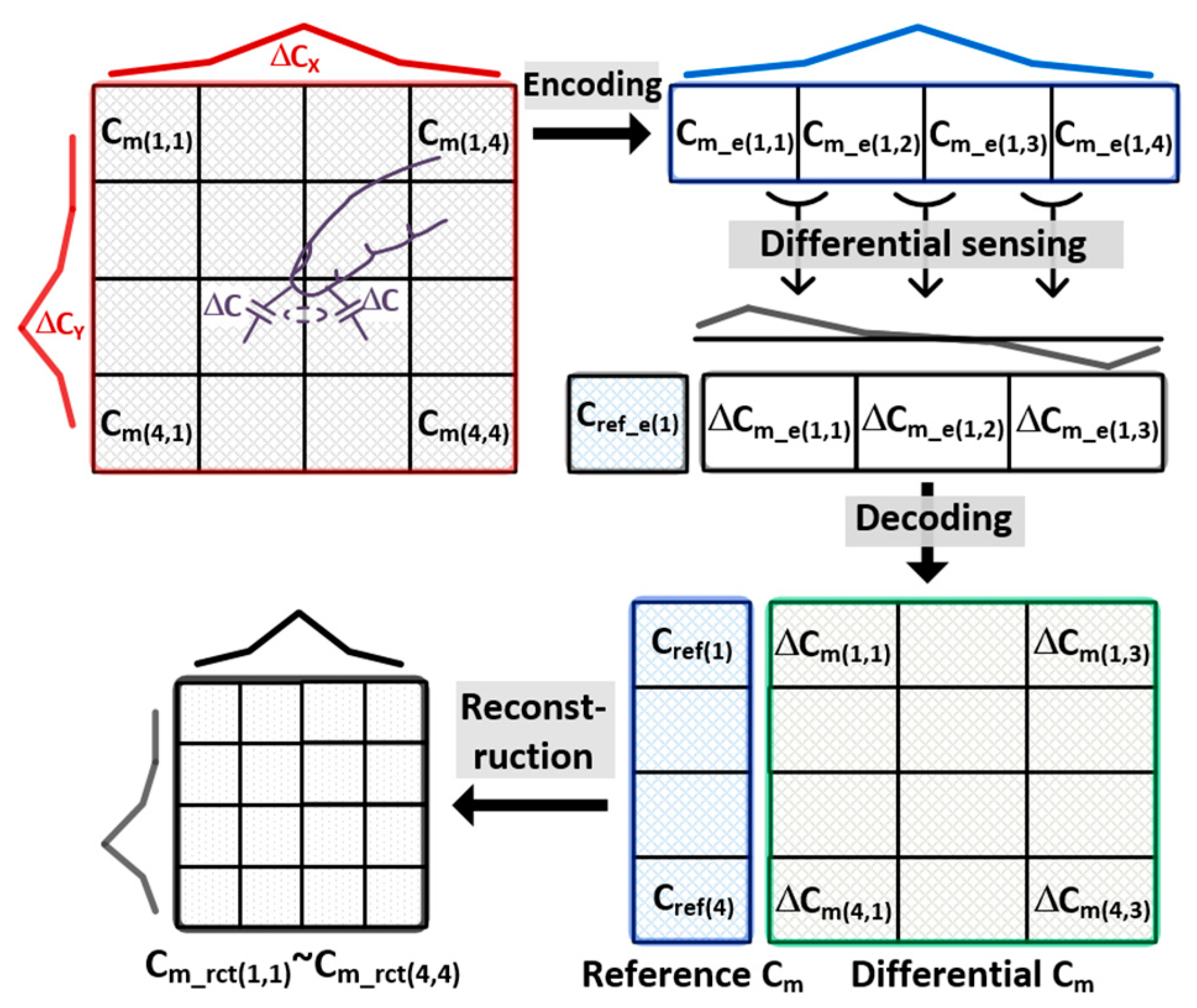
2.2. Capacitance Reconstruction in Multidriving, Differential Sensing Architecture
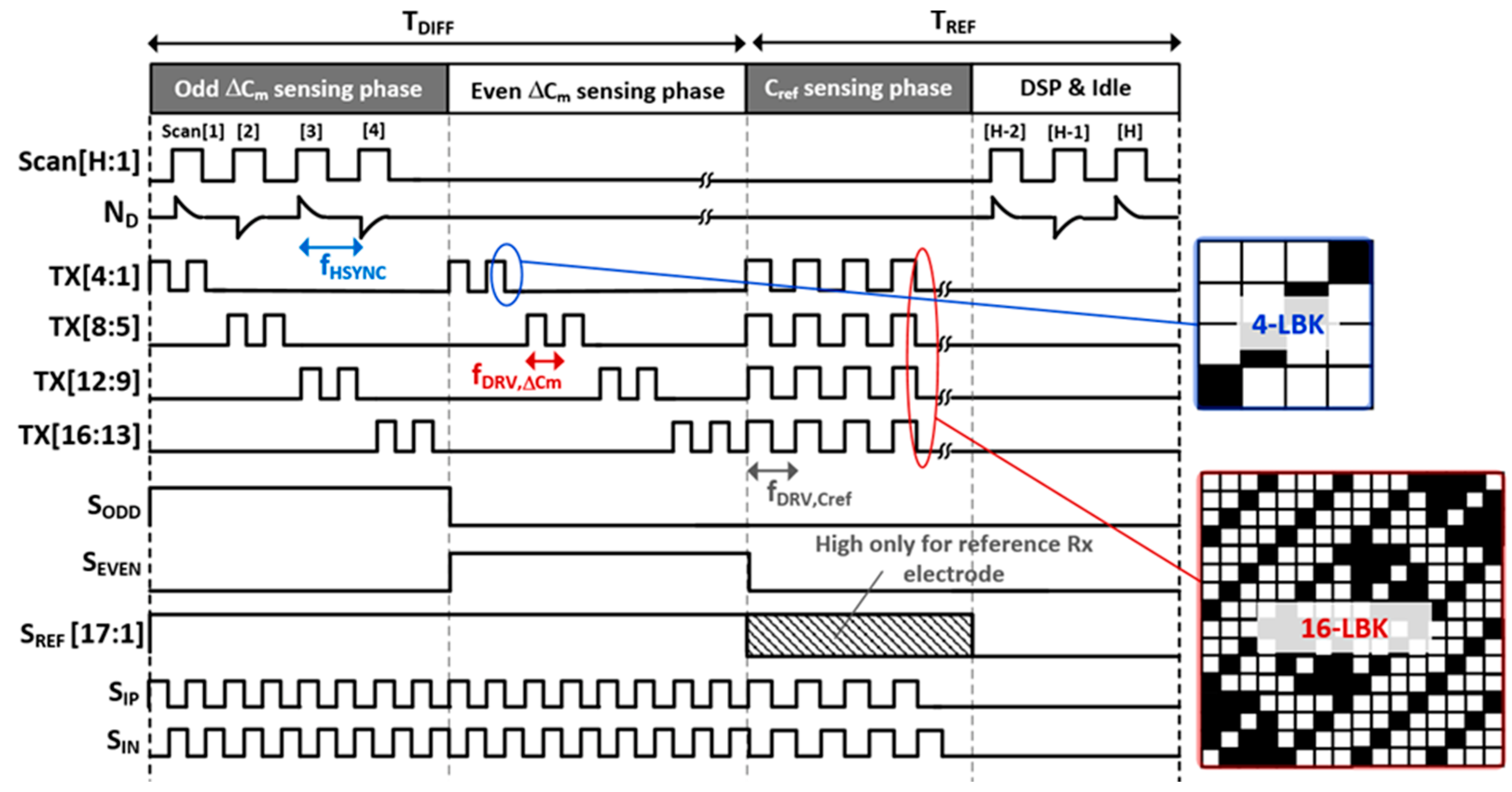
2.3. Proposed MRDS Scheme
3. Differential Front-End Architecture
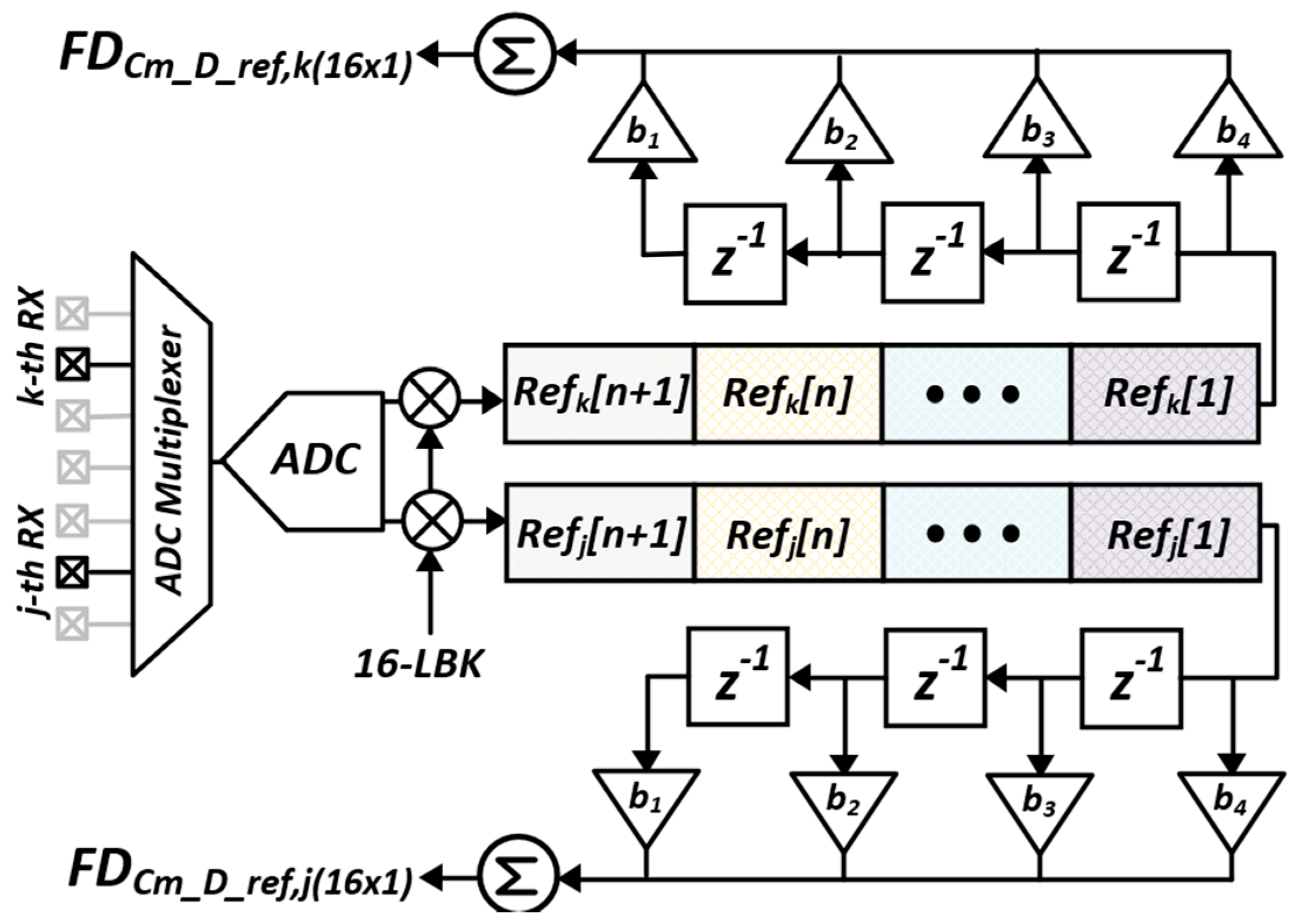
3.1. Block Description
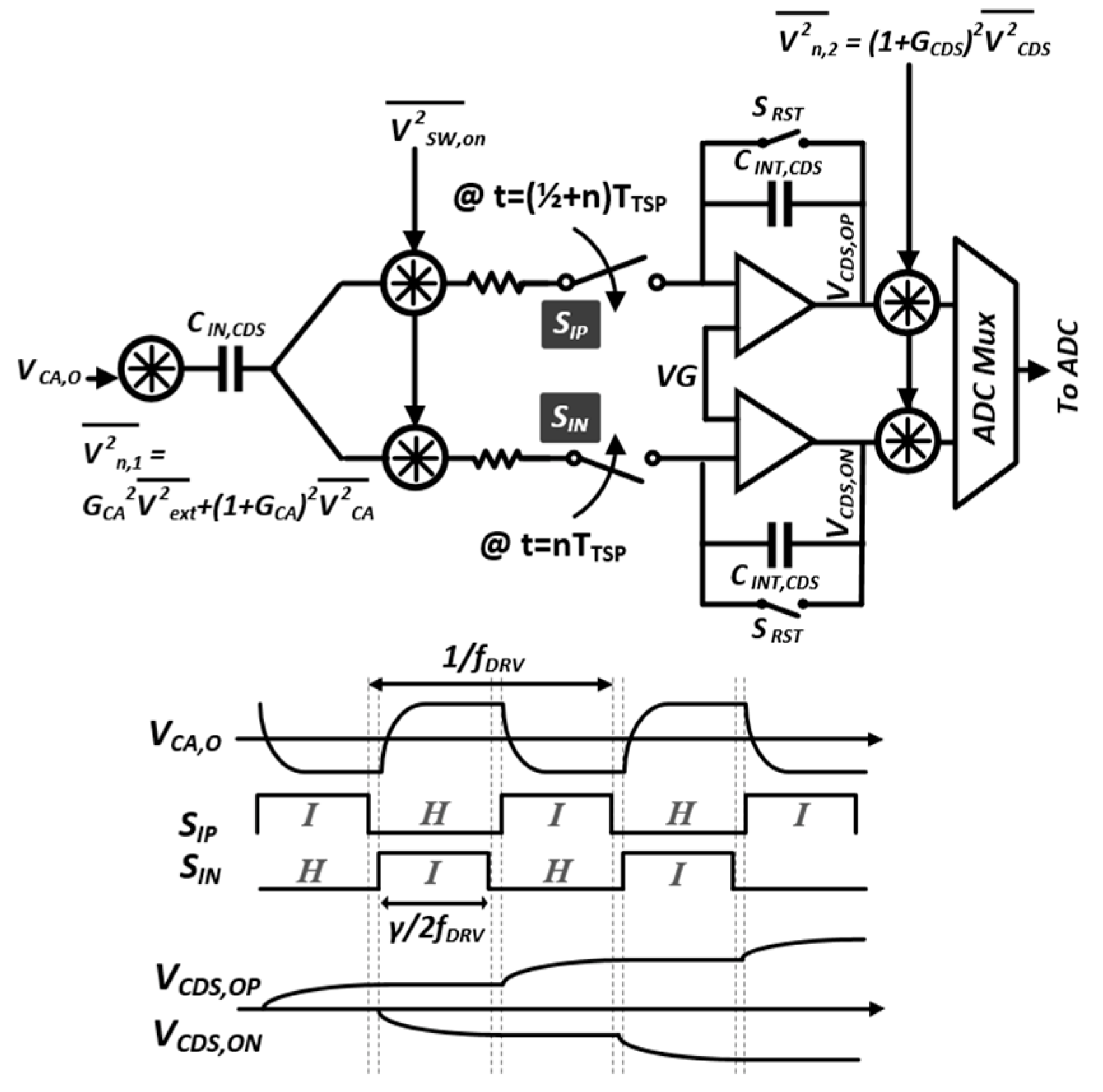
3.2. Analog Front-End Circuit
3.3. TSP Driver
4. Measurement Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Samsung Z Fold2 5G. Available online: https://www.samsung.com/us/smartphones/galaxy-z-fold2-5g/ (accessed on 1 June 2022).
- Gao, X.; Lin, L.; Liu, Y.; Huang, X. LTPS TFT process on polyimide substrate for flexible AMOLED. J. Display Technol. 2015, 11, 666–669. [Google Scholar] [CrossRef]
- Kim, S.; Jin, D.-U.; Kim, T.-W.; Koo, H.-W.; Stryakhilev, D.; Kim, H.-S.; Seo, S.-J.; Kim, M.-J.; Min, H.-K.; Chung, H.-K.; et al. Highly robust flexible AMOLED display on plastic substrate with new structure. Soc. Inf. Display (SID) Symp. Dig. 2010, 47, 703–705. [Google Scholar]
- Niu, Y.-F.; Liu, S.-F.; Chiou, J.-Y.; Huang, C.-Y.; Chiu, Y.-W.; Lai, M.-H.; Liu, Y.-W. Improving the flexibility of AMOLED display through modulating thickness of layer stack structure. J. Soc. Inf. Display 2016, 24, 293–298. [Google Scholar] [CrossRef]
- Ko, S.H.; Yang, B.D. An ultra-compact low power self-capacitive touch screen readout IC embedding reconfigurable noise immunity and current-driven capacitance compensation. IEEE Trans. Circuits Syst. II Exp. Briefs 2019, 66, 1321–1325. [Google Scholar] [CrossRef]
- Lee, C.-J.; Park, J.K.; Piao, C.; Seo, H.-E.; Choi, J.; Chun, J.-H. Mutual capacitive sensing touch screen controller for ultrathin display with extended signal passband using negative capacitance. Sensors 2018, 18, 3637. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Park, J.-E.; Park, J.; Hwang, Y.-H.; Oh, J.; Jeong, D.-K. A noise-immunity-enhanced analog front-end for 36×64 touch-screen controllers with 20-VPP noise tolerance at 100 kHz. IEEE J. Solid-State Circuits 2019, 54, 1497–1510. [Google Scholar] [CrossRef]
- Park, J.-E.; Lim, D.-H.; Jeong, D.-K. A reconfigurable 40-to-67 dB SNR, 50-to-6400 Hz frame-rate, column-parallel readout IC for capacitive touch-screen panels. IEEE J. Solid-State Circuits 2014, 49, 2305–2318. [Google Scholar] [CrossRef]
- Hamaguchi, M.; Nagao, A.; Miyamoto, M. A 240 Hz-reporting rate 143 × 81 mutual-capacitance touch-sensing analog front-end IC with 37 dB SNR for 1 mm-diameter stylus. IEEE ISSCC Dig. Tech. Papers 2014, 214–216. [Google Scholar] [CrossRef]
- Kim, K.-D.; Kang, S.; Choi, Y.-K.; Lee, K.-H.; Lee, C.-H.; Lee, J.-C.; Choi, M.; Ko, K.; Jung, J.; Park, N.; et al. A fully-differential capacitive touch controller with input common-mode feedback for symmetric display noise cancellation. Proc. IEEE SOVC. 2014, 1–2. [Google Scholar] [CrossRef]
- Park, J.-E.; Lim, D.-H.; Jeong, D.-K. A 6.3 mW high-SNR frame-rate scalable touch screen panel readout IC with column-parallel Ʃ-∆ ADC structure for mobile devices. In Proceedings of the 2013 IEEE Asian Solid-State Circuits Conference (A-SSCC 2013), Singapore, 11–13 November 2013; pp. 357–360. [Google Scholar]
- Ko, S.H. A Mutual Capacitance Touch Readout IC with Synchronization in Touch and Mobile Display Driving for High Refresh Rate AMOLED Panels. Micromachines 2021, 12, 922. [Google Scholar] [CrossRef] [PubMed]
- Shin, H.; Ko, S.; Jang, H.; Yun, I.; Lee, K. A 55 dB SNR with 240 Hz frame scan rate mutual capacitor 30 × 24 touch-screen panel read-out IC using code-division multiple sensing technique. IEEE ISSCC Dig. Tech. Papers 2013, 388–390. [Google Scholar] [CrossRef]
- Jang, H.; Shin, H.; Ko, S.; Yun, I.; Lee, K. 2D coded-aperture-based ultra-compact capacitive touch-screen controller with 40 reconfigurable channels. IEEE ISSCC Dig. Tech. Papers 2014, 218–219. [Google Scholar] [CrossRef]
- Park, J.; Hwang, Y.; Oh, J.; Song, Y.; Park, J.; Jeong, D. A mutual capacitance touch readout IC with 64% reduced-power adiabatic driving over heavily coupled touch screen. IEEE J. Solid-State Circuits 2019, 54, 1694–1704. [Google Scholar] [CrossRef]
- Golomb, S.W.; Scholtz, R.A. Generalized Barker sequences. IEEE Trans. Inform. Theory 1965, IT-11, 533–537. [Google Scholar] [CrossRef]
- Hotelling, S.P.; Christoph, H.K.; Huppi, B.Q. Multipoint Touch Surface Controller. U.S. Patent application US2007/ 0257890A1, 8 November 2007. [Google Scholar]
- Abidi, A.A. Software-defined radio receiver: Dream to reality. IEEE Commun. Mag. 2006, 44, 111–118. [Google Scholar]
- GSM Technical Specification, GSM 05.05, Version 5.0.0. Available online: https://www.etsi.org/deliver/etsi_gts/05/0505/05.00.00_60/gsmts_0505v050000p.pdf (accessed on 1 June 2022).
- Yang, I.S.; Kwon, O.K. A touch controller using differential sensing method for on-cell capacitive touch screen panel systems. IEEE Trans. Consum. Electron. 2011, 57, 1027–1032. [Google Scholar] [CrossRef]
- Ko, S.; Shin, H.; Lee, J.; Jang, H.; So, B.-C.; Yun, I.; Lee, K. Low noise capacitive sensor for multi-touch mobile handset’s applications. In Proceedings of the IEEE Asian Solid-State Circuits Conference, Seoul, Korea, 6–8 November 2010; pp. 1–4. [Google Scholar]
- Miyamoto, M.; Hamaguchi, M.; Nagaos, A. A 143×81 mutual capacitance touch-sensing analog front-end with parallel drive and differential sensing architecture. IEEE J. Solid-State Circuits 2015, 50, 335–343. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Present Study | [7] | [8] | [10] | [21] | [22] | ||
|---|---|---|---|---|---|---|---|
| Process | 0.35 μm (AFE) 0.13 μm (Digital) | 0.18 μm | 0.35 μm | 90 nm | 0.35 μm | 0.18 μm | |
| Electrodes | TX 16 × RX 34 | TX 36 × RX 64 | TX 12 × RX 8 | TX 28 × RX 16 | TX 29 × RX 53 | TX 78 × RX 138 | |
| Scan rate | 200 Hz | 85~385 Hz | 200 Hz | 200 Hz | 140 Hz | 240 Hz | |
| Power Consumption (PC) | 17.6 mW | 67.7 mW | 6.26 mW | 24.6 mW | 19 mW | 559.9 mW | |
| PC/Electrode | 22.8 μW | 29.3 μW | 65.2 μW | 54.9 μW | 12.3 μW | 52 μW | |
| Chip area | 4.8 mm2 | 36 mm2 | 2.2 mm2 | 15.9 mm2 | 20 mm2 | 71.2 mm2 | |
| SNR | Flexible AMOLED | 50.5 dB | 54 dB | 60 dB | 60 dB | 12.6 dB | 56.6 dB |
| Rigid AMOLED | 59 dB | ||||||
| Panel Size/ TSP Type | 6.7″ Metal Mesh Flexible AMOLED | 12.2″ ITO LCD | 4.3″ ITO | 5″ On-cell ITO AMOLED | 13.3″ ITO | 32″ Metal Mesh LCD | |
| FoM (1) (pJ/step) | 2.31 | 2.11 | 0.717 | 4.36 | 399 | 23.2 | |
| TSP Capacitance Sensing method | Multi-reference reconstruction | Column Parallel | Column Parallel | Column Parallel | Column Parallel | Column Parallel | |
| In-band spreading sequence | 16-lengh Barker | 36-length HM (2) | - | - | - | 255-length MLS (3) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, J.; Kim, H.; Ham, J.; Ko, S. Robust Touch Screen Readout System to Display Noise Using Multireference Differential Sensing Scheme for Flexible AMOLED Display. Micromachines 2022, 13, 942. https://doi.org/10.3390/mi13060942
Lee J, Kim H, Ham J, Ko S. Robust Touch Screen Readout System to Display Noise Using Multireference Differential Sensing Scheme for Flexible AMOLED Display. Micromachines. 2022; 13(6):942. https://doi.org/10.3390/mi13060942
Chicago/Turabian StyleLee, Junmin, Hyoyoung Kim, Juwon Ham, and Seunghoon Ko. 2022. "Robust Touch Screen Readout System to Display Noise Using Multireference Differential Sensing Scheme for Flexible AMOLED Display" Micromachines 13, no. 6: 942. https://doi.org/10.3390/mi13060942