
Micro/Nanorobots for Medical Diagnosis and Disease Treatment


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preparation Method of Micro/Nanorobots
2.1. Physical Vapor Deposition Technology
2.2. Self-Winding Technology
2.3. Laser Direct Writing 3D Printing Technology
2.4. Electrochemical Template Deposition Technology
2.5. Wet Chemical Synthesis
3. Driving Mode of Micro/Nanorobots
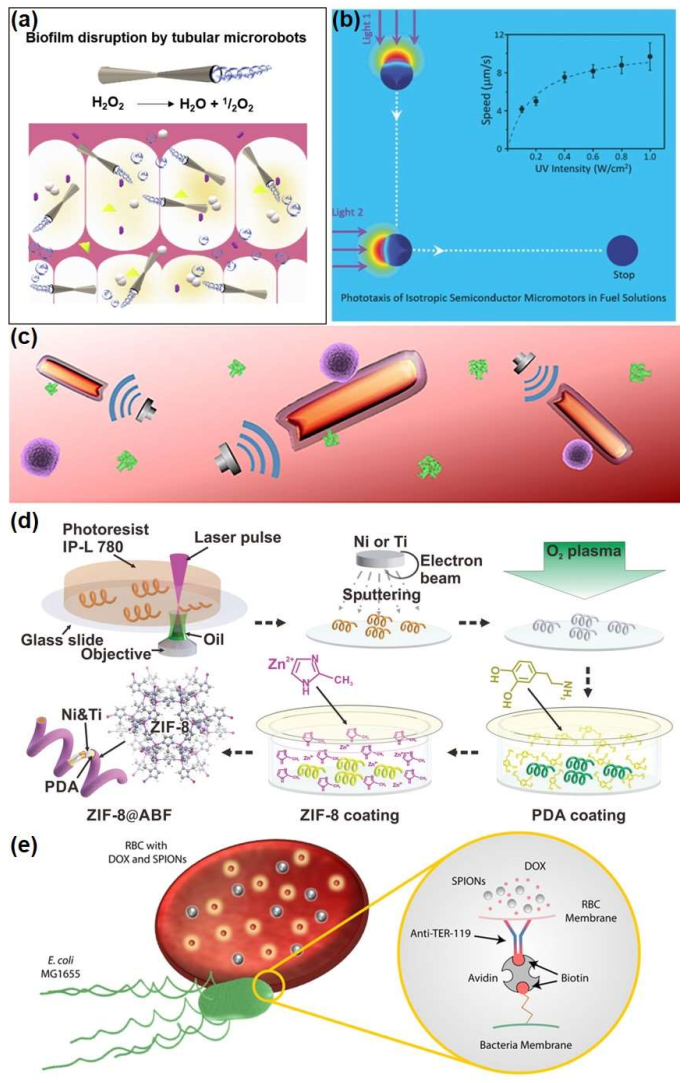
3.1. Chemical Propulsion
3.2. Physical Propulsion

3.3. Biological Propulsion
4. Micro/Nanorobots in Medical Diagnosis
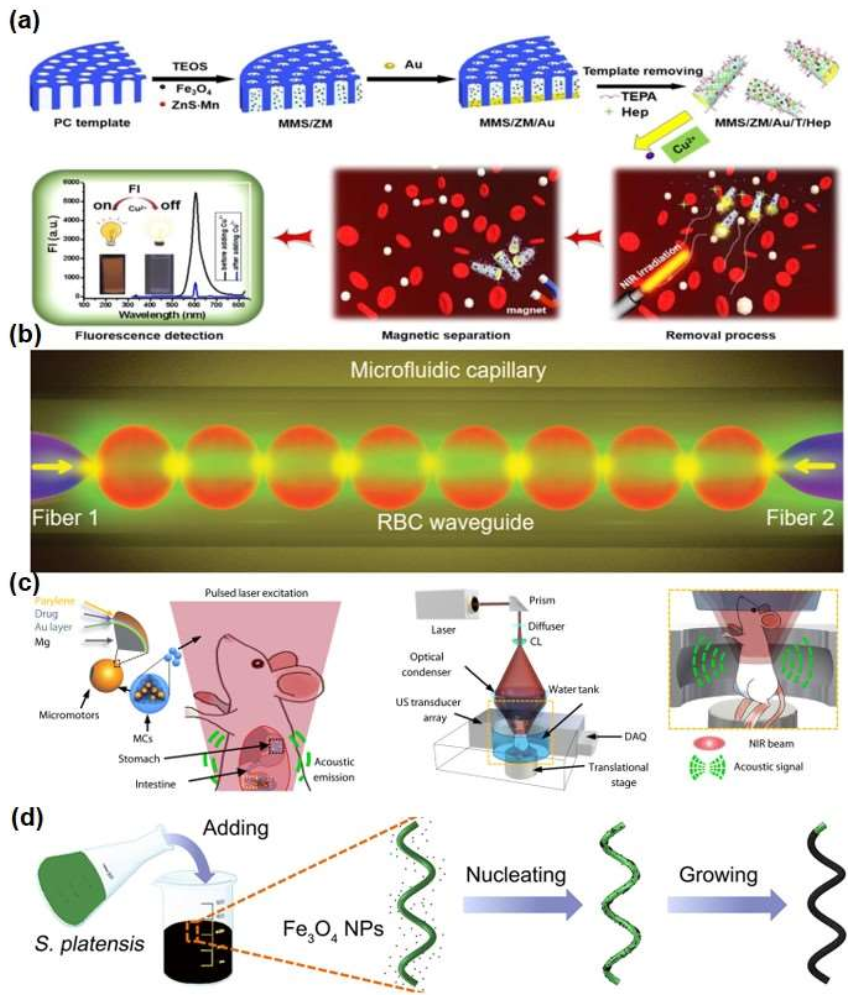
4.1. Sensing Detection
4.2. Imaging of Medical Micro/Nanorobots

5. Micro/Nanorobots in Disease Treatment
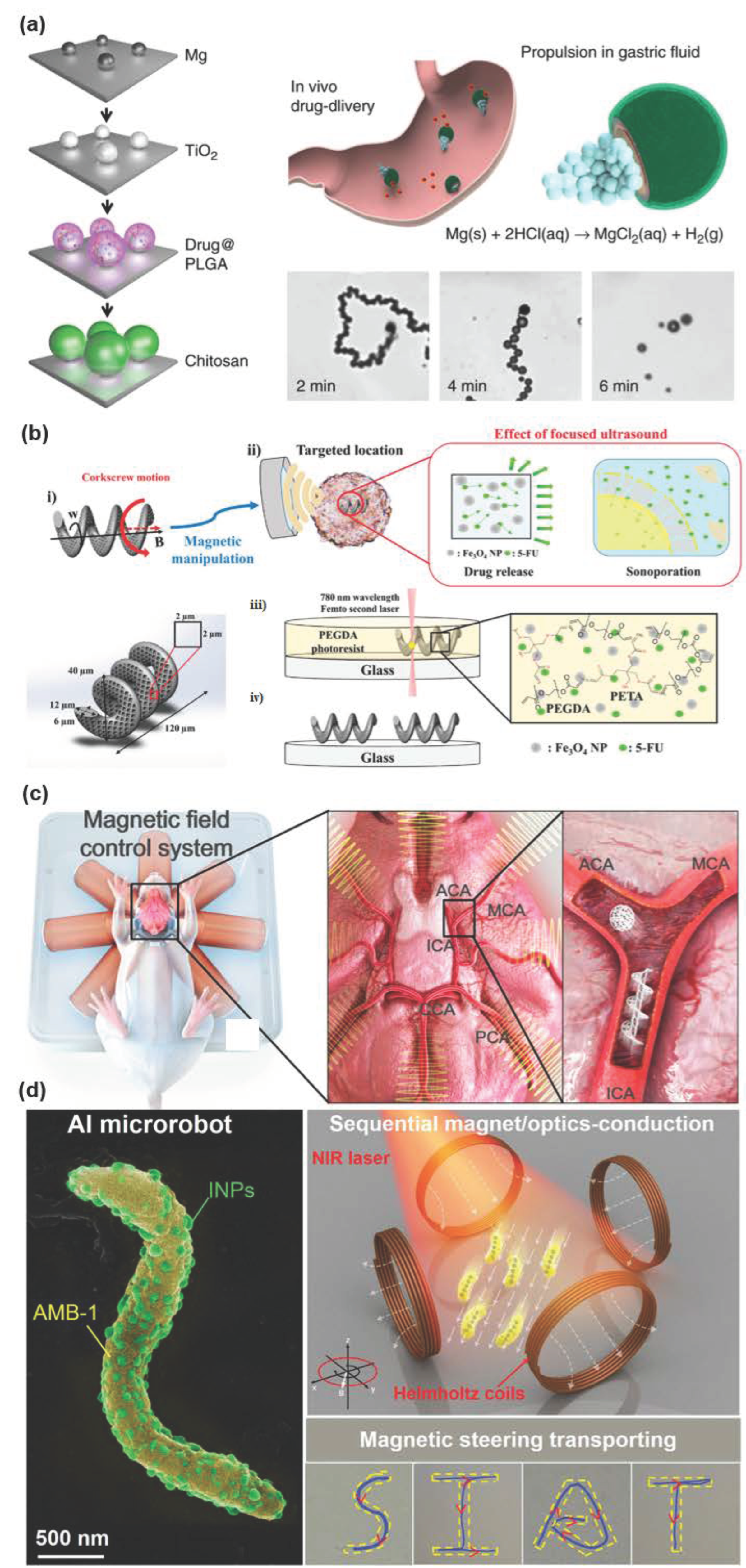
5.1. Drug Carriers

5.2. Surgery Tool

6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Terzopoulou, A.; Wang, X.; Chen, X.Z.; Palacios-Corella, M.; Pujante, C.; Herrero-Martín, J.; Qin, X.H.; Sort, J.; deMello, A.J.; Nelson, B.J.J. Biodegradable Metal–Organic Framework-Based Microrobots (MOFBOTs). Adv. Healthc. Mater. 2020, 9, 2001031. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Chen, Y.; Mukasa, D.; Pak, O.S.; Gao, W.J. Medical micro/nanorobots in complex media. Chem. Soc. Rev. 2020, 49, 8088–8112. [Google Scholar] [CrossRef] [PubMed]
- Fukuda, T.; Kajima, H.; Hasegawa, Y. Intelligent robots as artificial living creatures. Artif. Life Robot. 2004, 8, 101–110. [Google Scholar] [CrossRef]
- Gao, W.; Wang, J. The environmental impact of micro/nanomachines: A review. ACS Nano 2014, 8, 3170–3180. [Google Scholar] [CrossRef] [Green Version]
- Qiu, F. Magnetic helical micro-and nanorobots: Toward their biomedical applications. Engineering 2015, 1, 21–26. [Google Scholar] [CrossRef] [Green Version]
- Wei, T.; Liu, J.; Li, D.; Chen, S.; Zhang, Y.; Li, J.; Fan, L.; Guan, Z.; Lo, C.M.; Wang, L.; et al. Development of Magnet-Driven and Image-Guided Degradable Microrobots for the Precise Delivery of Engineered Stem Cells for Cancer Therapy. Small 2020, 16, 1906908. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Yang, L.; Vong, C.I.; Chan, K.F.; Wu, W.K.; Kwong, T.N.; Lo, N.W.; Ip, M.; Wong, S.H.; et al. Real-time tracking of fluorescent magnetic spore–based microrobots for remote detection of C. diff toxins. Sci. Adv. 2019, 5, 9650. [Google Scholar] [CrossRef] [Green Version]
- Nicolini, A.; Carpi, A. Advanced breast cancer: An update and controversies on diagnosis and therapy. Biomed. Pharmacother. 2004, 57, 439–446. [Google Scholar] [CrossRef]
- Huang, C. Diagnosis and treatment trends in biomedicine. Biomedicine 2013, 3, 147. [Google Scholar] [CrossRef]
- Taheri, A.; Mohammadi-Amin, M.; Moosavy, S.H. A numerical strategy to design maneuverable micro-biomedical swimming robots based on biomimetic flagellar propulsion. World Acad. Sci. Eng. Technol. 2009, 54, 500–504. [Google Scholar]
- Shivalkar, S.; Gautam, P.K.; Chaudhary, S.; Samanta, S.K.; Sahoo, A.K. Recent development of autonomously driven micro/nanobots for efficient treatment of polluted water. J. Environ. Manag. 2021, 281, 111750. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Tang, S.; Teymourian, H.; Karshalev, E.; Zhang, F.; Li, J.; Mou, F.; Liang, F.; Guan, J.; Wang, J. Chemical/Light-Powered Hybrid Micromotors with “On-the-Fly” Optical Brakes. Angew. Chem. Int. Ed. 2018, 130, 8242–8246. [Google Scholar] [CrossRef]
- Mei, Y.; Huang, G.; Solovev, A.A.; Ureña, E.B.; IMönch, I.; Ding, F.; Reindl, T.; Fu, R.K.Y.; Chu, P.K.; Schmidt, O.G. Versatile approach for integrative and functionalized tubes by strain engineering of nanomembranes on polymers. Adv. Mater. 2008, 20, 4085–4090. [Google Scholar] [CrossRef]
- Zhang, L.; Abbott, J.J.; Dong, L.; Kratochvil, B.E.; Bell1, D.; Nelson, B.J. Artificial bacterial flagella: Fabrication and magnetic control. Appl. Phys. Lett. 2009, 94, 064107. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Liu, Y.; Yang, Y.; Shen, Y. A fast and powerful swimming microrobot with a serrated tail enhanced propulsion interface. Nanoscale 2018, 10, 19673–19677. [Google Scholar] [CrossRef]
- Gao, W.; Sattayasamitsathit, S.; Orozco, J.; Wang, J. Highly efficient catalytic microengines: Template electrosynthesis of polyaniline/platinum microtubes. J. Am. Chem. Soc. 2011, 133, 11862–11864. [Google Scholar] [CrossRef] [Green Version]
- Dai, B.; Wang, J.; Xiong, Z.; Zhan, X.; Dai, W.; Li, C.; Feng, S.; Tang, J. Programmable artificial phototactic microswimmer. Nat. Nanotechnol. 2016, 11, 1087–1092. [Google Scholar] [CrossRef]
- Joh, H.; Fan, D.E. Materials and Schemes of Multimodal Reconfigurable Micro/Nanomachines and Robots: Review and Perspective. Adv. Mater. 2021, 33, 2101965. [Google Scholar] [CrossRef]
- Villa, K.; Viktorova, J.; Plutnar, J.; Ruml, T.; Hoang, L.; Pumera, M. Chemical Microrobots as Self-Propelled Microbrushes against Dental Biofilm. Cell Rep. Phys. Sci. 2020, 1, 100181. [Google Scholar] [CrossRef]
- Chen, Y.; Shi, Y. Characterizing the autonomous motions of linear catalytic nanomotors using molecular dynamics simulations. J. Phys. Chem. C 2011, 115, 19588–19597. [Google Scholar] [CrossRef]
- Gao, W.; Dong, R.; Thamphiwatana, S.; Li, J.; Gao, W.; Zhang, L.; Wang, J. Artificial micromotors in the mouse’s stomach: A step toward in vivo use of synthetic motors. ACS Nano 2015, 9, 117–123. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hermanová, S.; Pumera, M. Biocatalytic Micro-and Nanomotors. Chem. Eur. J. 2020, 26, 11085–11092. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Mou, F.; Gong, H.; Luo, M.; Guan, J. Light-driven micro/nanomotors: From fundamentals to applications. Chem. Soc. Rev. 2017, 46, 6905–6926. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Mou, F.; Xu, L.; Wang, S.; Guan, J.; Feng, Z.; Wang, Q.; Kong, L.; Li, W.; Wang, J. Light-Steered Isotropic Semiconductor Micromotors. Adv. Mater. 2017, 29, 1603374. [Google Scholar] [CrossRef]
- Pansare, V.J.; Hejazi, S.; Faenza, W.J.; Prud’homme, R.K. Review of long-wavelength optical and NIR imaging materials: Contrast agents, fluorophores, and multifunctional nano carriers. Chem. Mater. 2012, 24, 812–827. [Google Scholar] [CrossRef] [Green Version]
- Nadal, F.; Lauga, E. Asymmetric steady streaming as a mechanism for acoustic propulsion of rigid bodies. Phys. Fluids 2014, 26, 082001. [Google Scholar] [CrossRef] [Green Version]
- de Ávila, B.E.-F.; Angsantikul, P.; Ramírez-Herrera, D.E.; Soto, F.; Teymourian, H.; Dehaini, D.; Chen, Y.; Zhang, L.; Wang, J. Hybrid biomembrane–functionalized nanorobots for concurrent removal of pathogenic bacteria and toxins. Sci. Robot. 2018, 3, 0485. [Google Scholar]
- Kagan, D.; Benchimol, M.J.; Claussen, J.C.; Chuluun-Erdene, E.; Esener, S.; Wang, J. Acoustic droplet vaporization and propulsion of perfluorocarbon-loaded microbullets for targeted tissue penetration and deformation. Angew. Chem. Int. Ed. 2012, 51, 7519–7522. [Google Scholar] [CrossRef] [Green Version]
- Yang, L.; Chen, X.; Wang, L.; Hu, Z.; Xin, C.; Hippler, M.; Zhu, W.; Hu, Y.; Li, J.; Wang, Y.; et al. Targeted single-cell therapeutics with magnetic tubular micromotor by one-step exposure of structured femtosecond optical vortices. Adv. Funct. Mater. 2019, 29, 1905745. [Google Scholar] [CrossRef]
- Wang, X.P.; Chen, X.Z.; Alcântara, C.C.; Sevim, S.; Hoop, M.; Terzopoulou, A.; De Marco, C.; Hu, C.; de Mello, A.J.; Falcaro, P.; et al. MOFBOTS: Metal–organic-framework-based biomedical microrobots. Adv. Mater. 2019, 31, 1901592. [Google Scholar] [CrossRef]
- Xu, L.; Gong, D.; Chen, K.; Cai, J.; Zhang, W. Acoustic levitation applied for reducing undesired lateral drift of magnetic helical microrobots. J. Appl. Phys. 2020, 128, 184703. [Google Scholar] [CrossRef]
- Wang, B.; Kostarelos, K.; Nelson, B.J.; Zhang, L. Trends in Micro-/Nanorobotics: Materials Development, Actuation, Localization, and System Integration for Biomedical Applications. Adv. Mater. 2021, 33, 2002047. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Medina-Sánchez, M.; Magdanz, V.; Schwarz, L.; Hebenstreit, F.; Schmidt, O.G. Sperm-hybrid micromotor for targeted drug delivery. ACS Nano 2018, 12, 327–337. [Google Scholar] [CrossRef] [Green Version]
- Alapan, Y.; Yasa, O.; Schauer, O.; Giltinan, J.; Tabak, A.F.; Sourjik, V.; Sitti, M. Soft erythrocyte-based bacterial microswimmers for cargo delivery. Sci. Robot. 2018, 3, 4423. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Q.; Li, T.; Fang, D.; Li, X.; Fang, L.; Wang, X.; Mao, C.; Wang, F.; Wan, M. Micromotor for removal/detection of blood copper ion. Microchem. J. 2020, 158, 105125. [Google Scholar] [CrossRef]
- Molinero-Fernández, Á.; Moreno-Guzmán, M.; Arruza, L.; López, M.Á.; Escarpa, A. Polymer-based micromotor fluorescence immunoassay for on-the-move sensitive procalcitonin determination in very low birth weight infants’ plasma. ACS Sensors 2020, 5, 1336–1344. [Google Scholar] [CrossRef]
- Rasia, M.; Bollini, A. Red blood cell shape as a function of medium’s ionic strength and pH. Biochim. Biophys. Acta 1998, 1372, 198–204. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Liu, X.; Xu, X.; Xin, H.; Zhang, Y.; Li, B. Red-blood-cell waveguide as a living biosensor and micromotor. Adv. Funct. Mater. 2019, 29, 1905568. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, H.; Dong, L.; Shi, Q.; Li, J.; Sun, T.; Huang, Q.; Fukuda, T. Ionic shape-morphing microrobotic end-effectors for environmentally adaptive targeting, releasing, and sampling. Nat. Commun. 2021, 12, 411. [Google Scholar] [CrossRef]
- Li, D.; Dong, D.; Lam, W.; Xing, L.; Wei, T.; Sun, D. Automated in vivo navigation of magnetic-driven microrobots using OCT imaging feedback. IEEE T. Bio.-Med. Eng. 2019, 67, 2349–2358. [Google Scholar] [CrossRef]
- Wu, Z.; Li, L.; Yang, Y.; Hu, P.; Li, Y.; Yang, S.-Y.; Wang, L.V.; Gao, W. A microrobotic system guided by photoacoustic computed tomography for targeted navigation in intestines in vivo. Sci. Robot. 2019, 4, 0613. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iacovacci, V.; Blanc, A.; Huang, H.; Ricotti, L.; Schibli, R.; Menciassi, A.; Behe, M.; Pané, S.; Nelson, B.J. High-Resolution SPECT Imaging of Stimuli-Responsive Soft Microrobots. Small 2019, 15, 1900709. [Google Scholar] [CrossRef] [PubMed]
- Yan, X.; Zhou, Q.; Vincent, M.; Deng, Y.; Yu, J.; Xu, J.; Xu, T.; Tang, T.; Bian, L.; Wang, Y.-X.J. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017, 2, 1155. [Google Scholar] [CrossRef] [Green Version]
- Singh, A.V.; Ansari, M.H.D.; Laux, P.; Luch, A.J.E. Micro-nanorobots: Important considerations when developing novel drug delivery platforms. Expert Opin. Drug Del. 2019, 16, 1259–1275. [Google Scholar] [CrossRef] [PubMed]
- de Ávila, B.E.-F.; Angsantikul, P.; Li, J.; Lopez-Ramirez, M.A.; Ramírez-Herrera, D.E.; Thamphiwatana, S.; Chen, C.; Delezuk, J.; Samakapiruk, R.; Ramez, V. Micromotor-enabled active drug delivery for in vivo treatment of stomach infection. Nat. Commun. 2017, 8, 272. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, L.; Zhu, H.; Shi, Y.; Ge, Y.; Feng, X.; Liu, R.; Li, Y.; Ma, Y.; Wang, L. Novel catalytic micromotor of porous zeolitic imidazolate framework-67 for precise drug delivery. Nanoscale 2018, 10, 11384–11391. [Google Scholar] [CrossRef]
- Park, J.; Jin, C.; Lee, S.; Kim, J.Y.; Choi, H.J.A.H.M. Magnetically actuated degradable microrobots for actively controlled drug release and hyperthermia therapy. Adv. Healthc. Mater. 2019, 8, 1900213. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.Y.; Pané, S.; Nelson, B.J.; Choi, H. Acoustically Mediated Controlled Drug Release and Targeted Therapy with Degradable 3D Porous Magnetic Microrobots. Adv. Healthc. Mater. 2021, 10, 2001096. [Google Scholar] [CrossRef]
- Zhong, D.; Li, W.; Qi, Y.; He, J.; Zhou, M. Photosynthetic biohybrid nanoswimmers system to alleviate tumor hypoxia for FL/PA/MR imaging-guided enhanced radio-photodynamic synergetic therapy. Adv. Funct. Mater. 2020, 30, 1910395. [Google Scholar] [CrossRef]
- Wang, C.; Fernández de Ávila, B.E.; Mundaca-Uribe, R.; Lopez-Ramirez, M.A.; Ramírez-Herrera, D.E.; Shukla, S.; Steinmetz, N.F.; Wang, J. Active delivery of VLPs promotes anti-tumor activity in a mouse ovarian tumor model. Small 2020, 16, 1907150. [Google Scholar] [CrossRef]
- Xing, J.; Yin, T.; Li, S.; Xu, T.; Ma, A.; Chen, Z.; Luo, Y.; Lai, Z.; Lv, Y.; Pan, H.; et al. Sequential Magneto-Actuated and Optics-Triggered Biomicrorobots for Targeted Cancer Therapy. Adv. Funct. Mater. 2021, 31, 2008262. [Google Scholar] [CrossRef]
- Jeon, S.; Kim, S.; Ha, S.; Lee, S.; Kim, E.; Kim, S.Y.; Park, S.H.; Jeon, J.H.; Kim, S.W.; Moon, C. Magnetically actuated microrobots as a platform for stem cell transplantation. Sci. Robot. 2019, 4, 4317. [Google Scholar] [CrossRef] [PubMed]
- Villa, K.; Krejčová, L.; Novotný, F.; Heger, Z.; Sofer, Z.; Pumera, M. Cooperative multifunctional self-propelled paramagnetic microrobots with chemical handles for cell manipulation and drug delivery. Adv. Funct. Mater. 2018, 28, 1804343. [Google Scholar] [CrossRef]
- Magdanz, V.; Sanchez, S.; Schmidt, O.G. Development of a sperm-flagella driven micro-bio-robot. Adv. Mater. 2013, 25, 6581–6588. [Google Scholar] [CrossRef]
- Chen, C.; Chen, L.; Wang, P.; Wu, L.-F.; Song, T. Steering of magnetotactic bacterial microrobots by focusing magnetic field for targeted pathogen killing. J. Magn. Magn. Mater. 2019, 479, 74–83. [Google Scholar] [CrossRef] [Green Version]
- Lin, Z.; Gao, C.; Wang, D.; He, Q. Bubble-Propelled Janus Gallium/Zinc Micromotors for the Active Treatment of Bacterial Infections. Angew. Chem. Int. Edit. 2021, 60, 8750–8754. [Google Scholar] [CrossRef]
- Wu, Z.; Troll, J.; Jeong, H.-H.; Wei, Q.; Stang, M.; Ziemssen, F.; Wang, Z.; Dong, M.; Schnichels, S.; Qiu, T. A swarm of slippery micropropellers penetrates the vitreous body of the eye. Sci. Adv. 2018, 4, 4388. [Google Scholar] [CrossRef] [Green Version]
- Pokki, J.; Ergeneman, O.; Chatzipirpiridis, G.; Lühmann, T.; Sort, J.; Pellicer, E.; Pot, S.A.; Spiess, B.M.; Pané, S.; Nelson, B.J. Protective coatings for intraocular wirelessly controlled microrobots for implantation: Corrosion, cell culture, and in vivo animal tests. J. Biomed. Iomed. Mater. Res. B. 2017, 105, 836–845. [Google Scholar] [CrossRef] [Green Version]
- Wan, M.; Wang, Q.; Wang, R.; Wu, R.; Li, T.; Fang, D.; Huang, Y.; Yu, Y.Q.; Fang, L.Y.; Wang, X.W.; et al. Platelet-derived porous nanomotor for thrombus therapy. Sci. Adv. 2020, 6, 9014. [Google Scholar] [CrossRef]
- Zhao, W.; Xu, T. Preliminary engineering forin situ in vivobioprinting: A novel micro bioprinting platform forin situ in vivobioprinting at a gastric wound site. Biofabrication 2020, 12, 045020. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Zhang, Y.; Han, Y.; Gong, X. Micro/Nanorobots for Medical Diagnosis and Disease Treatment. Micromachines 2022, 13, 648. https://doi.org/10.3390/mi13050648
Zhang Y, Zhang Y, Han Y, Gong X. Micro/Nanorobots for Medical Diagnosis and Disease Treatment. Micromachines. 2022; 13(5):648. https://doi.org/10.3390/mi13050648
Chicago/Turabian StyleZhang, Yinglei, Yuepeng Zhang, Yaqian Han, and Xue Gong. 2022. "Micro/Nanorobots for Medical Diagnosis and Disease Treatment" Micromachines 13, no. 5: 648. https://doi.org/10.3390/mi13050648