
Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone

 ,
,
Abstract
:1. Introduction
2. Self-Contained MEMS Vector Hydrophone
2.1. Sensitive Principle of the Sensor
2.2. Encapsulation Design of Self-Contained MEMS Vector Hydrophone
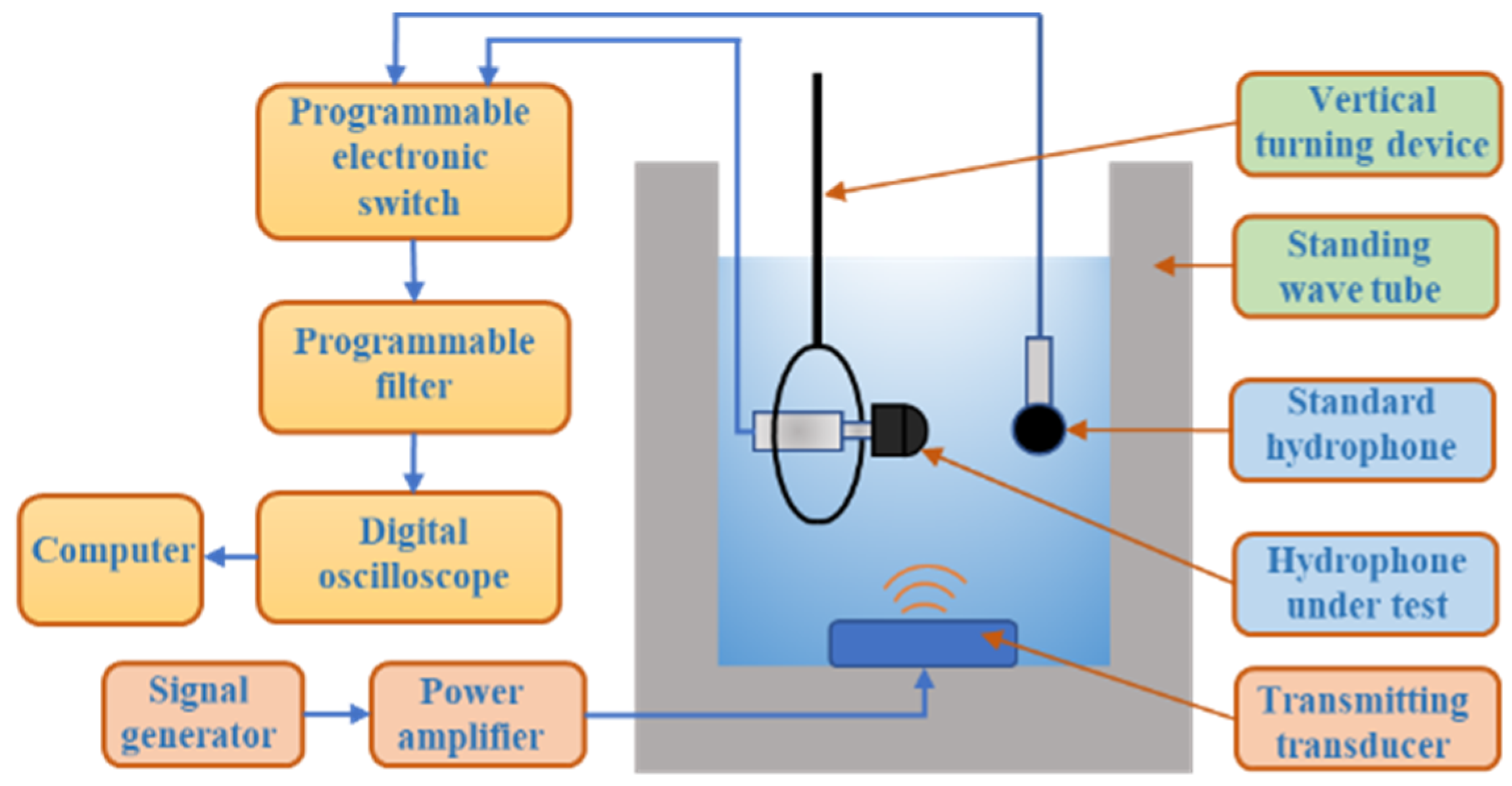
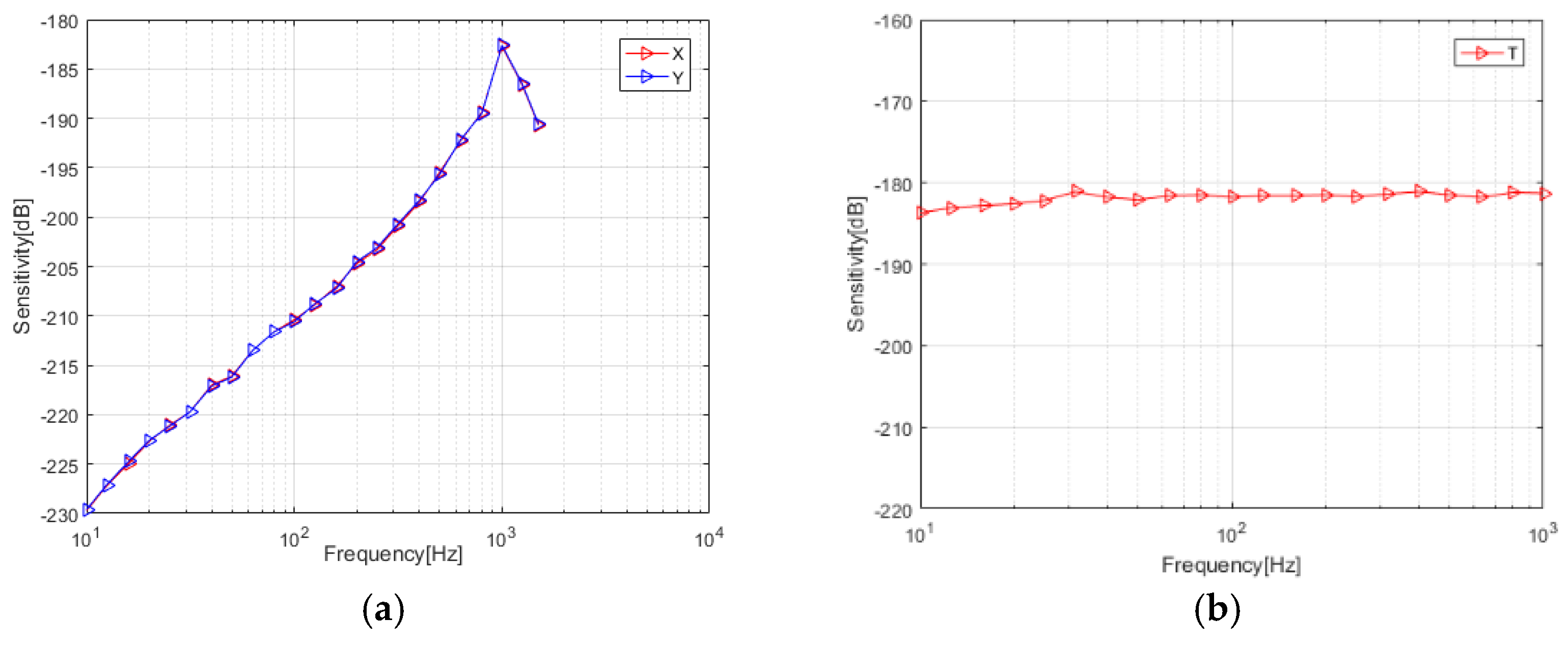
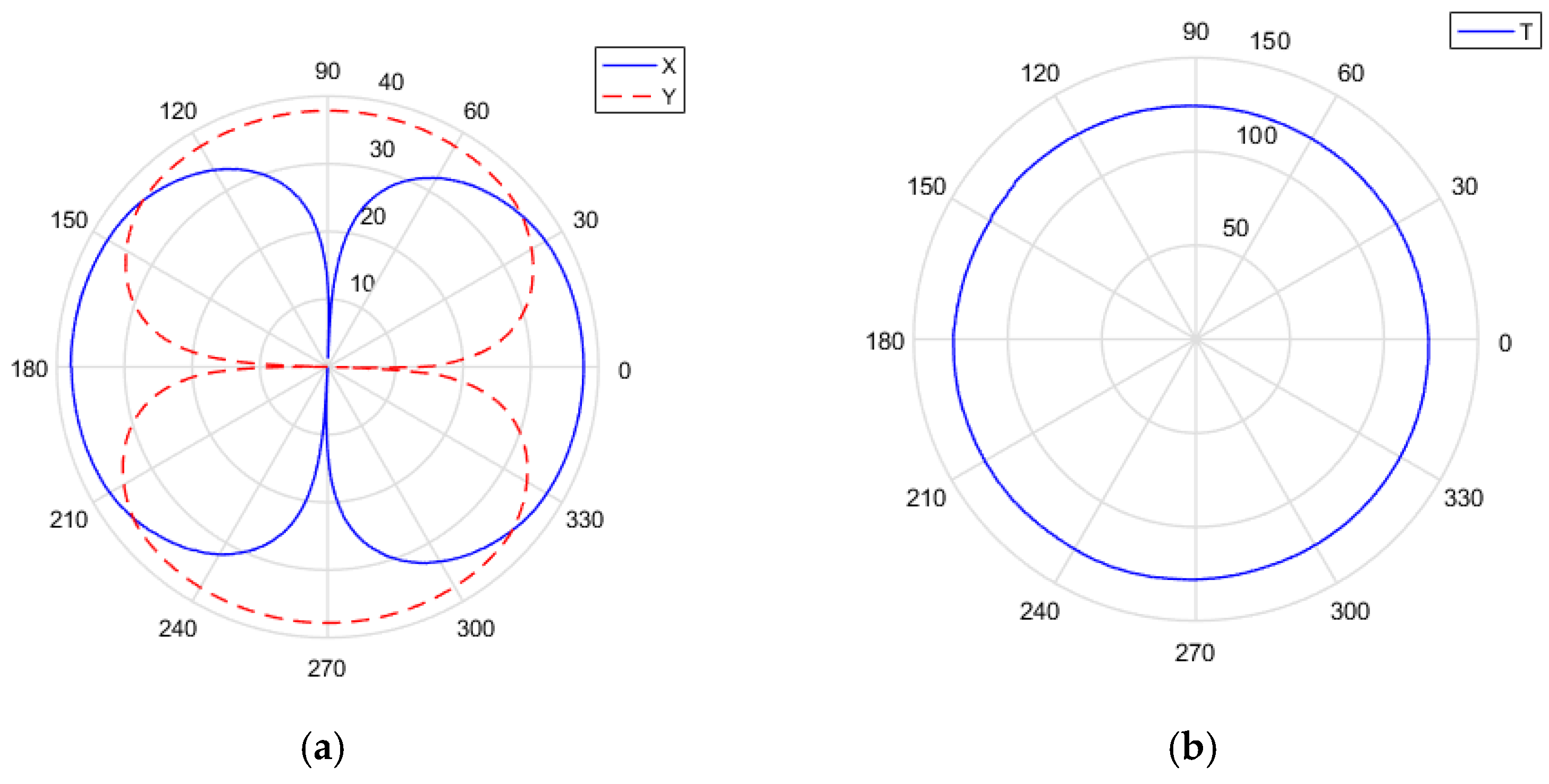
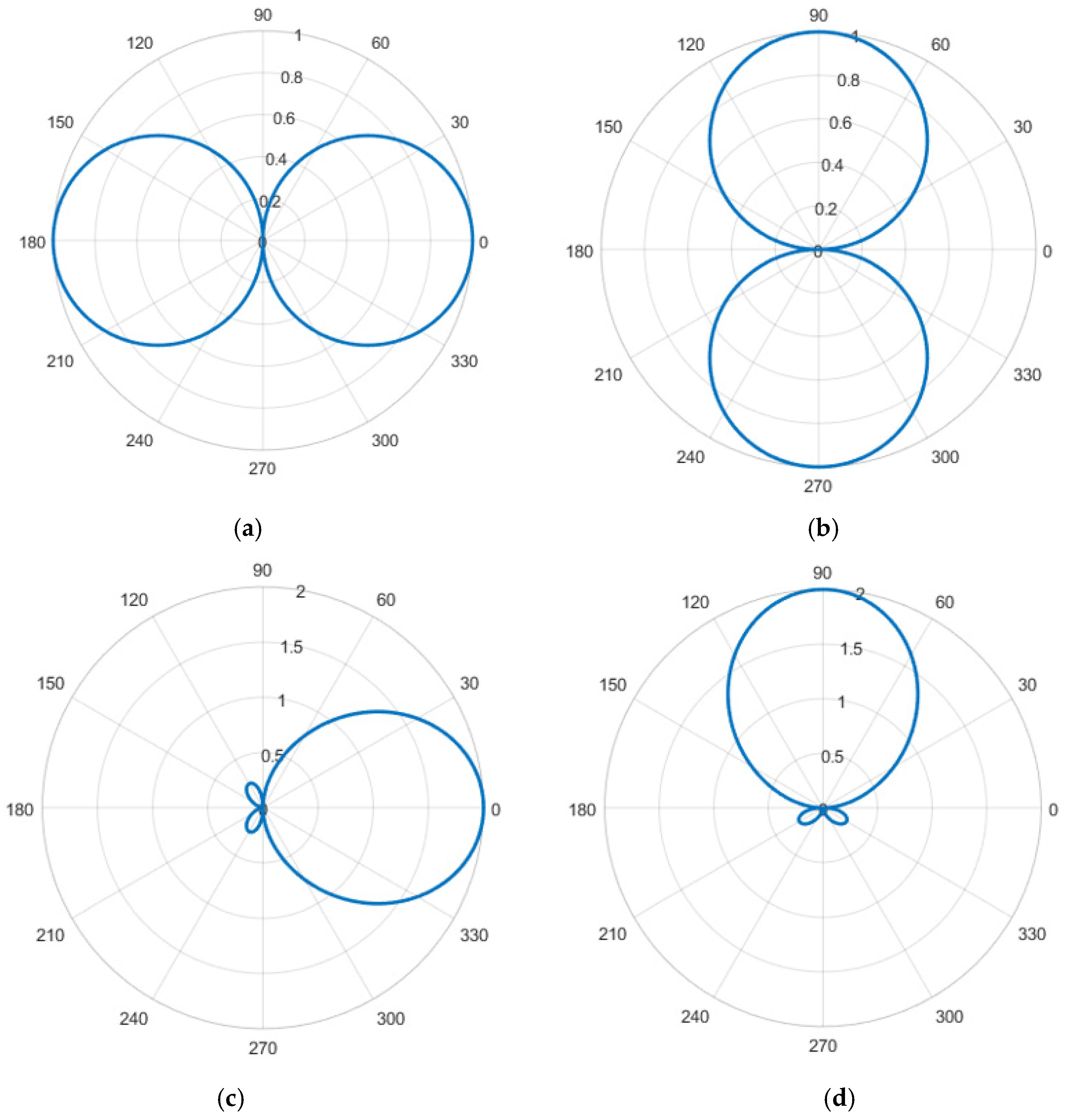
2.3. Target Recognition Characteristics of Self-Contained MEMS Vector Hydrophone
3. Principles of Azimuth Estimation Algorithm
3.1. Principles of Beamforming Algorithm
3.2. Principle of Amplitude and Phase Calibration
4. Experiment
4.1. Indoor Experiment
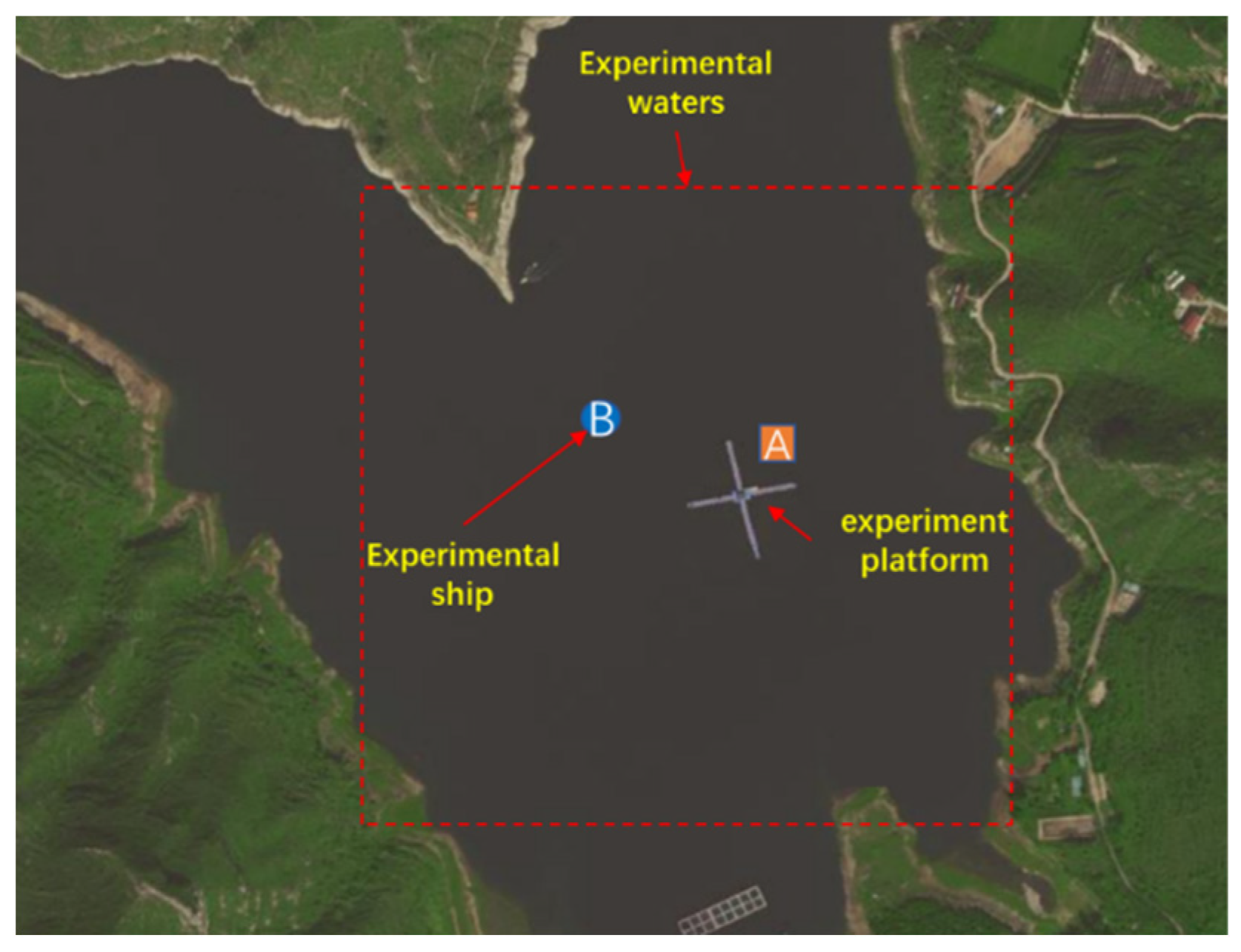
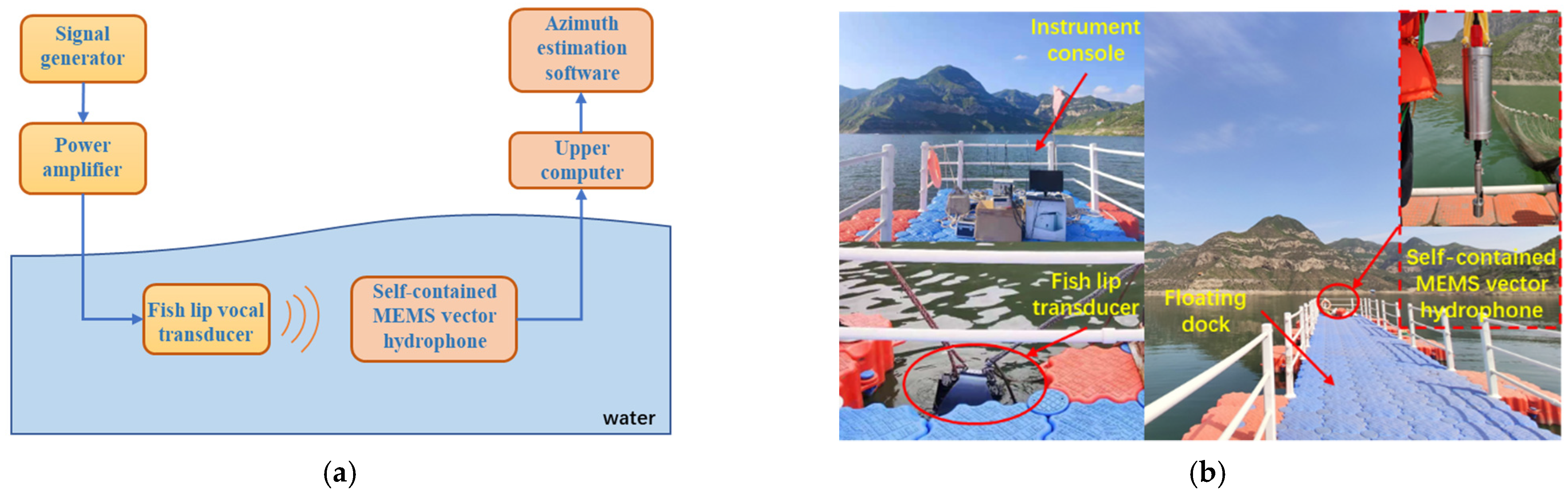
4.2. Outdoor Water Experiment
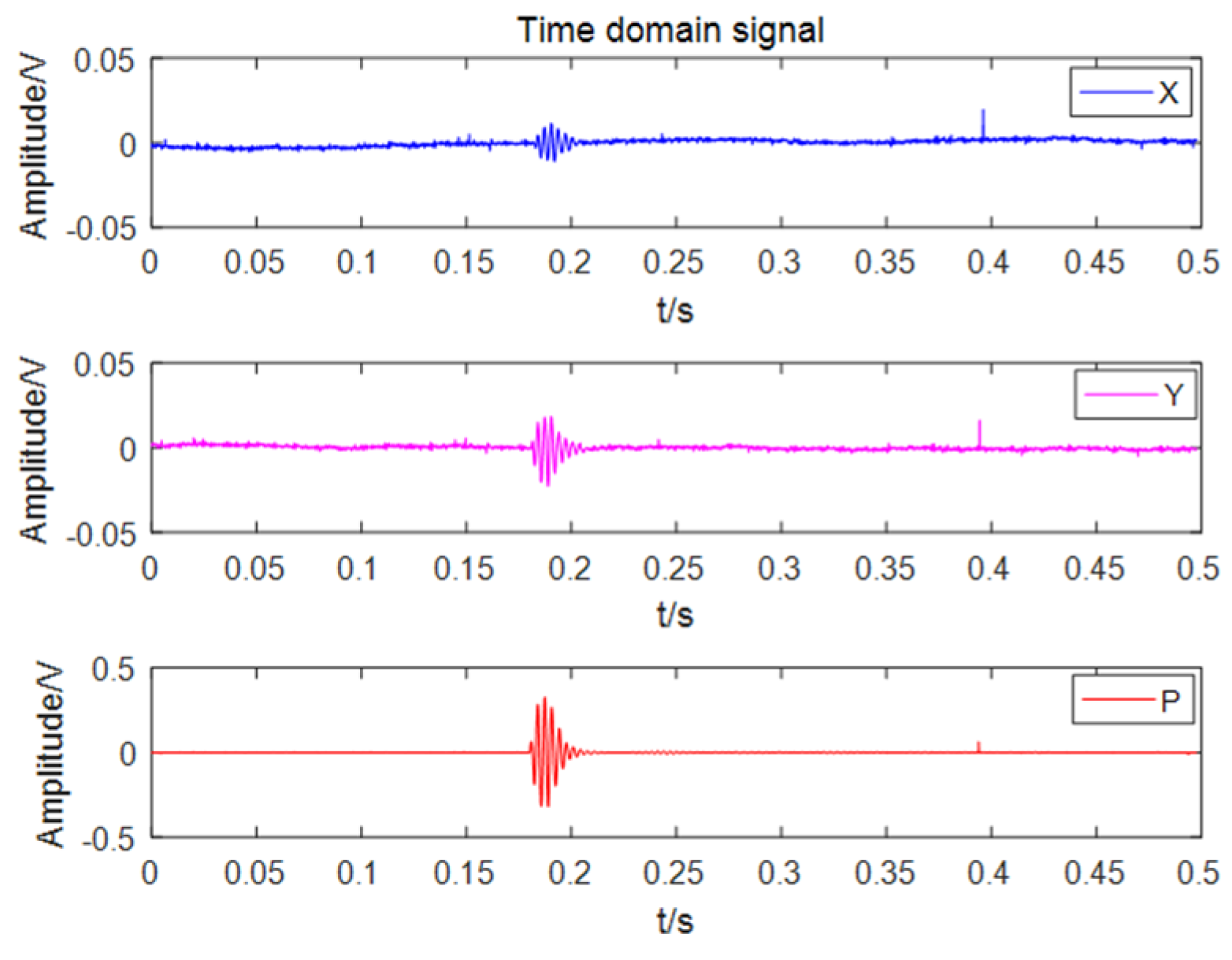
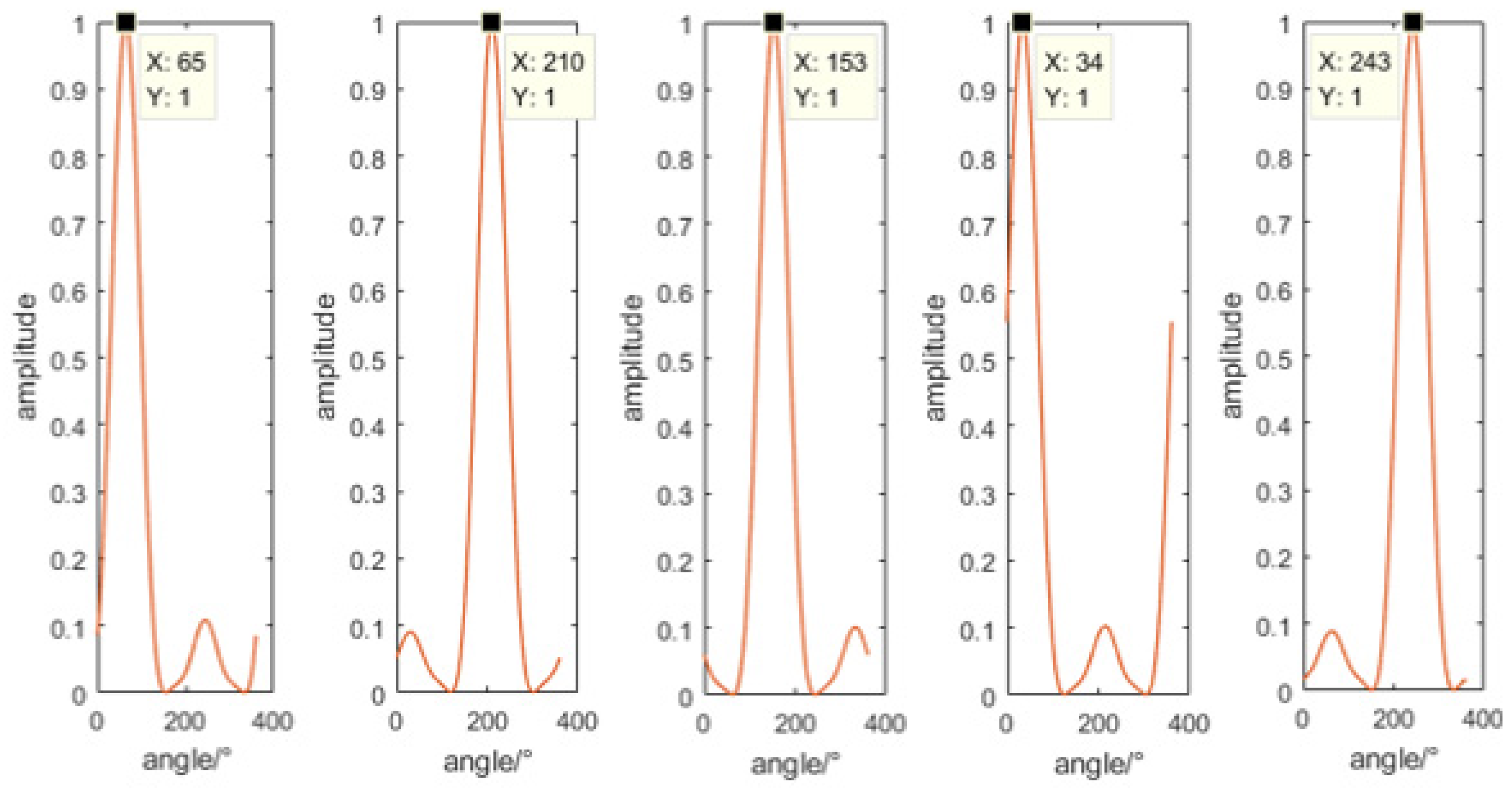
4.2.1. Fixed Target Experiment
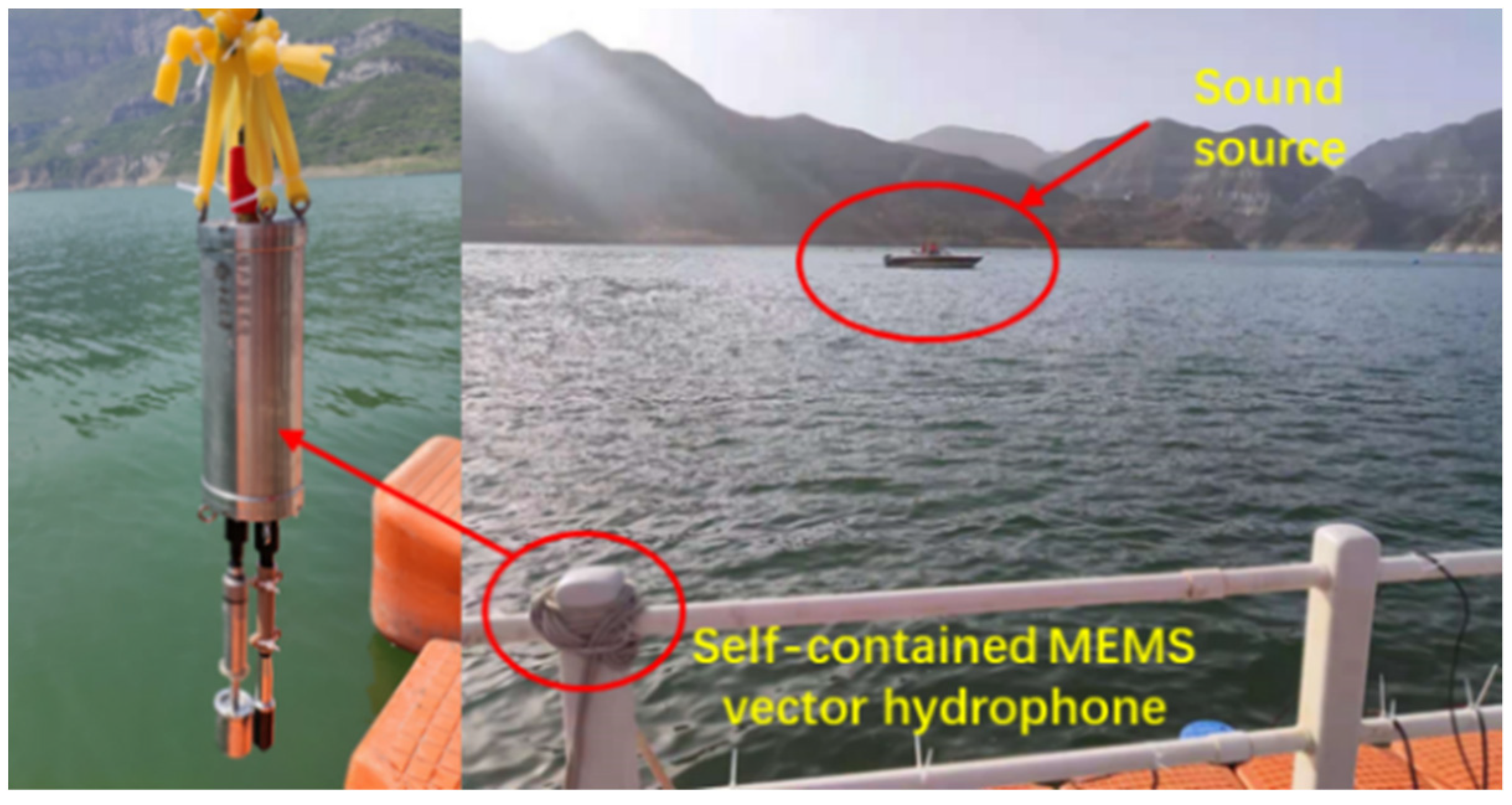
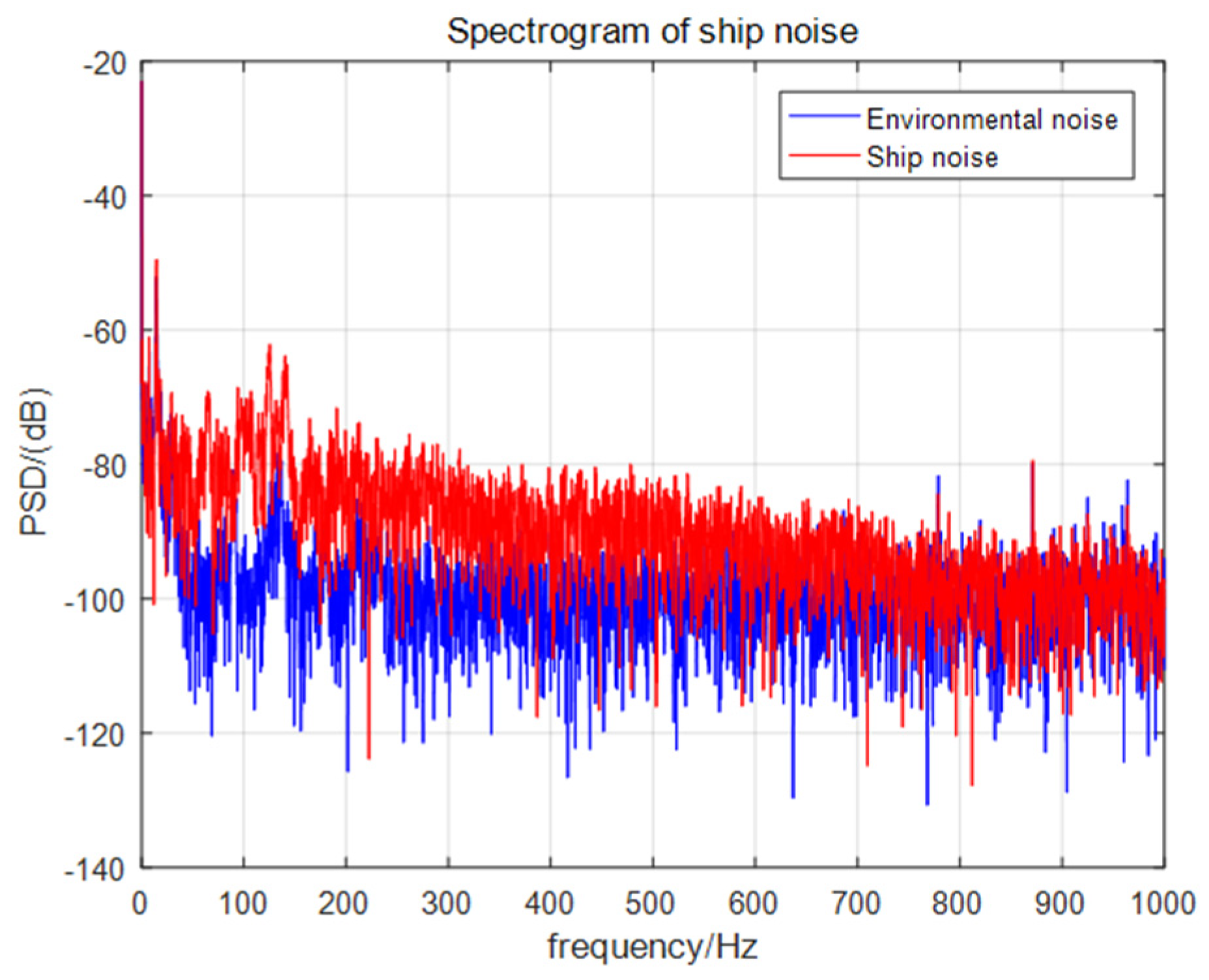
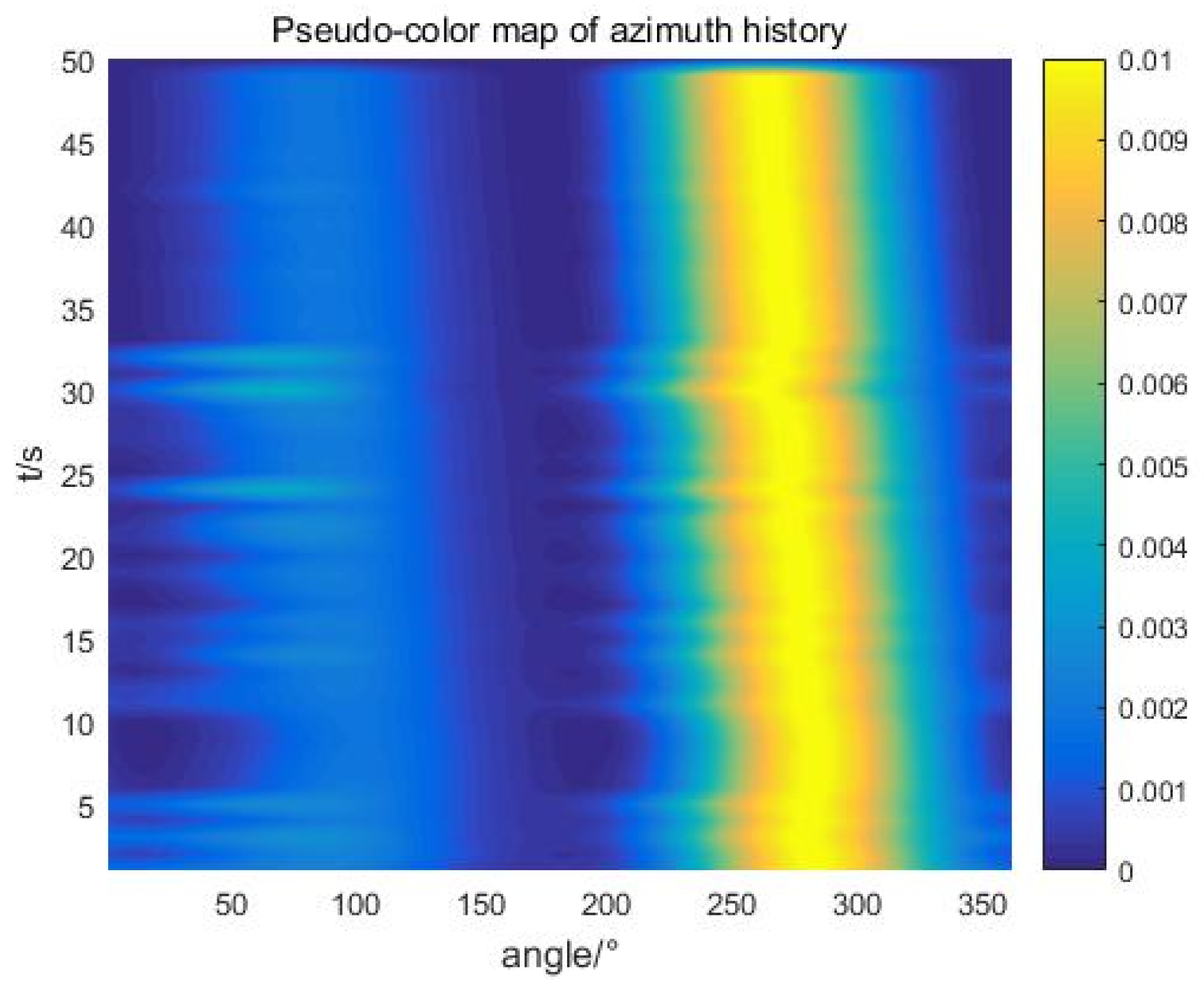
4.2.2. Moving Target Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Leslie, C.B. Hydrophone for Measuring Particle Velocity. J. Acoust. Soc. Am. 1956, 28, 711–715. [Google Scholar] [CrossRef]
- Gabrielson, T.B.; Gardner, D.L.; Garrett, S.L. A simple neutrally buoyant sensor for direct measurement of particle velocity and intensity in water. J. Acoust. Soc. Am. 1995, 97, 2227–2237. [Google Scholar] [CrossRef]
- Moffett, M.B.; Trivett, D.H.; Klippel, P.J.; Baird, P.D. A piezoelectric, flexural-disk, neutrally buoyant, underwater accelerometer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1998, 45, 1341–1346. [Google Scholar] [CrossRef] [PubMed]
- Bifano, T.G.; Cleveland, R.O.; Compton, D.A.; Pierce, A.D. A novel microelectromechanical system (MEMS) design for an underwater acoustic field sensor. J. Acoust. Soc. Am. 1999, 105, 998. [Google Scholar] [CrossRef]
- Shang, C.; Xue, C.; Zhang, B.; Xie, B.; Hui, Q. A Novel MEMS Based Piezoresistive Vector Hydrophone for Low Frequency Detection. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007. [Google Scholar]
- Xue, C.; Chen, S.; Zhang, W.; Zhang, B.; Zhang, G.; Qiao, H. Design, fabrication, and preliminary characterization of a novel MEMS bionic vector hydrophone. Microelectron. J. 2007, 38, 1021–1026. [Google Scholar] [CrossRef]
- Xue, C.; Tong, Z.; Zhang, B.; Zhang, W. A Novel Vector Hydrophone Based on the Piezoresistive Effect of Resonant Tunneling Diode. IEEE Sens. J. 2008, 8, 401–402. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, R.; Zhang, G.; Du, J.; Zhao, L.; Xue, C.; Zhang, W.; Liu, J. “Lollipop-shaped” high-sensitivity Microelectromechanical Systems vector hydrophone based on Parylene encapsulation. J. Appl. Phys. 2015, 118, 044501. [Google Scholar] [CrossRef]
- Xu, Q.; Zhang, G.; Ding, J.; Wang, R.; Pei, Y.; Ren, Z.; Shang, Z.; Xue, C.; Zhang, W. Design and implementation of two-component cilia cylinder MEMS vector hydrophone. Sens. Actuators A Phys. 2018, 277, 142–149. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, Q.; Zhang, G.; Wang, R.; Pei, Y.; Wang, W.; Lian, Y.; Ji, S.; Zhang, W. Design and fabrication of a multipurpose cilia cluster MEMS vector hydrophone. Sens. Actuators A Phys. 2019, 296, 331–339. [Google Scholar] [CrossRef]
- Zhu, S.; Zhang, G.J.; Shang, Z.Z.; Yang, X.; Lv, T.; Liang, X.Q.; Zhang, X.Y.; Chen, P.; Zhang, W.D. Design and realization of cap-shaped cilia MEMS vector hydrophone. Measurement 2021, 183, 109818. [Google Scholar] [CrossRef]
- Nehorai, A.; Paldi, E. Acoustic vector sensor array processing. IEEE J. Ocean. Eng. 1992, 42, 2481–2491. [Google Scholar]
- Hochwald, B.; Nehorai, A. Identifiability in Array Processing Models with Vector-Sensor Applications. IEEE Seventh SP Workshop Stat. Signal Array Process. 1994, 44, 83–95. [Google Scholar]
- Wong, K.T.; Zoltowski, M. Extended-aperture underwater acoustic multisource azimuth/elevation direction-finding using uniformly but sparsely spaced vector hydrophones. IEEE J. Ocean. Eng. 1997, 22, 659–672. [Google Scholar] [CrossRef] [Green Version]
- Wong, K.T.; Zoltowski, M. Closed-form underwater acoustic direction-finding with arbitrarily spaced vector-hydrophones at unknown locations. IEEE J. Ocean. Eng. 1997, 22, 566–575. [Google Scholar] [CrossRef]
- Hawkes, M.; Nehorai, A. Acoustic vector-sensor beamforming and Capon direction estimation. Int. Conf. Acoust. 1998, 46, 2291–2304. [Google Scholar] [CrossRef]
- Hui, J.; Chun-Xu, L.I.; Liang, G.; Liu, H. With pressure and particle velocity a combined signal processing approach against coherent interference. Acta Acust. 2000, 25, 389–394. [Google Scholar]
- Yao, Z.X. A histogram approach of the azimuth angle estimation using a single vector hydrophone. Appl. Acoust. 2006, 25, 161–167. [Google Scholar]
- Duan, W.; Kirby, R.; Prisutova, J.; Horoshenkov, K.V. Measurement of complex acoustic intensity in an acoustic waveguide. J. Acoust. Soc. Am. 2013, 134, 3674. [Google Scholar] [CrossRef] [Green Version]
- Song, Y.; Li, Y.L.; Wong, K.T. Acoustic direction finding using a pressure sensor and a uniaxial particle velocity sensor. IEEE Trans. Aerosp. Electron. Syst. 2016, 51, 2560–2569. [Google Scholar] [CrossRef]
- Anbang, Z.; Lin, M.; Juan, H.; Caigao, Z.; Xuejie, B. Open-Lake Experimental Investigation of Azimuth Angle Estimation Using a Single Acoustic Vector Sensor. J. Sens. 2018, 2018, 1–11. [Google Scholar]
- Kinu, K.; Najeem, S.; Latha, G. Experimental Result for Direction of Arrival (DOA) Estimation Using under Water Acoustic Vector Sensor. In Proceedings of the 2015 International Symposium on Ocean Electronics (SYMPOL), Kochi, India, 18–20 November 2015. [Google Scholar]
- Shang, Z.; Zhang, W.; Zhang, G.; Zhang, X.; Wang, R. A study on MEMS vector hydrophone and its orientation algorithm. Sens. Rev. 2020; ahead-of-print. [Google Scholar]
- Shang, Z.; Zhang, W.; Zhang, G.; Zhang, X.; Ji, S.; Wang, R. Mixed near field and far field sources localization algorithm based on MEMS vector hydrophone array. Measurement 2019, 151, 107109. [Google Scholar] [CrossRef]
- Bobber, R.J. Metrology Standards of the Underwater Sound Reference Division; Defense Technical Information Center: Fort Belvoir, VA, USA, 1973. [Google Scholar]
- Xu, W.; Liu, Y.; Zhang, G.; Wang, R.; Xue, C.; Zhang, W.; Liu, J. Development of cup-shaped micro-electromechanical systems-based vector hydrophone. J. Appl. Phys. 2016, 120, 124502. [Google Scholar] [CrossRef]
- Yu, A.; Ke, X.; Wan, J. Research on Source of Phase Difference between Channels of the Vector Hydrophone. In Proceedings of the 2016 IEEE 13th International Conference on Signal Processing (ICSP), Chengdu, China, 6–10 November 2016. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure Name | Parameter (µm) |
|---|---|
| Length of cantilever (L) | 1000 |
| Width of cantilever (b) | 120 |
| Thickness of cantilever (t) | 40 |
| Half side length of central block (a) | 300 |
| Radius of cilia (r) | 200 |
| Radius of outer cap wall (r2) | 600 |
| Height of cilia upper cylinder (h1) | 1900 |
| Height of hat cylinder (h2) | 1000 |
| Height of cilia lower cylinder (h3) | 1500 |
| Thickness of cap wall (d) | 200 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, S.; Zhang, G.; Wu, D.; Liang, X.; Zhang, Y.; Lv, T.; Liu, Y.; Chen, P.; Zhang, W. Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone. Micromachines 2022, 13, 236. https://doi.org/10.3390/mi13020236
Zhu S, Zhang G, Wu D, Liang X, Zhang Y, Lv T, Liu Y, Chen P, Zhang W. Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone. Micromachines. 2022; 13(2):236. https://doi.org/10.3390/mi13020236
Chicago/Turabian StyleZhu, Shan, Guojun Zhang, Daiyue Wu, Xiaoqi Liang, Yifan Zhang, Ting Lv, Yan Liu, Peng Chen, and Wendong Zhang. 2022. "Research on Direction of Arrival Estimation Based on Self-Contained MEMS Vector Hydrophone" Micromachines 13, no. 2: 236. https://doi.org/10.3390/mi13020236