
High-Precision Wafer Bonding Alignment Mark Using Moiré Fringes and Digital Grating

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Alignment Process
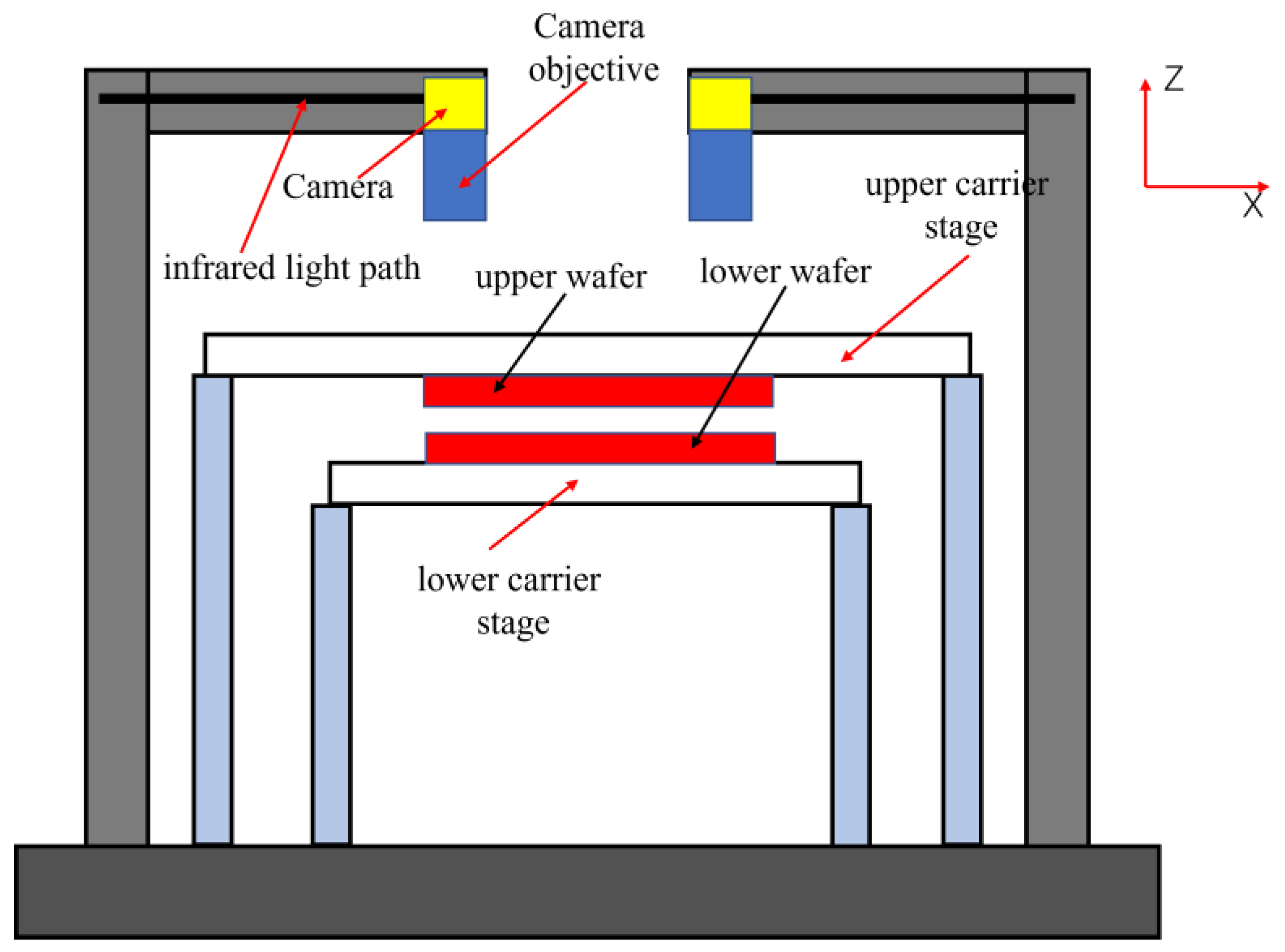
2.1. Coaxial Alignment
2.2. Lower Wafer Position Record
2.3. Upper Wafer Position Record
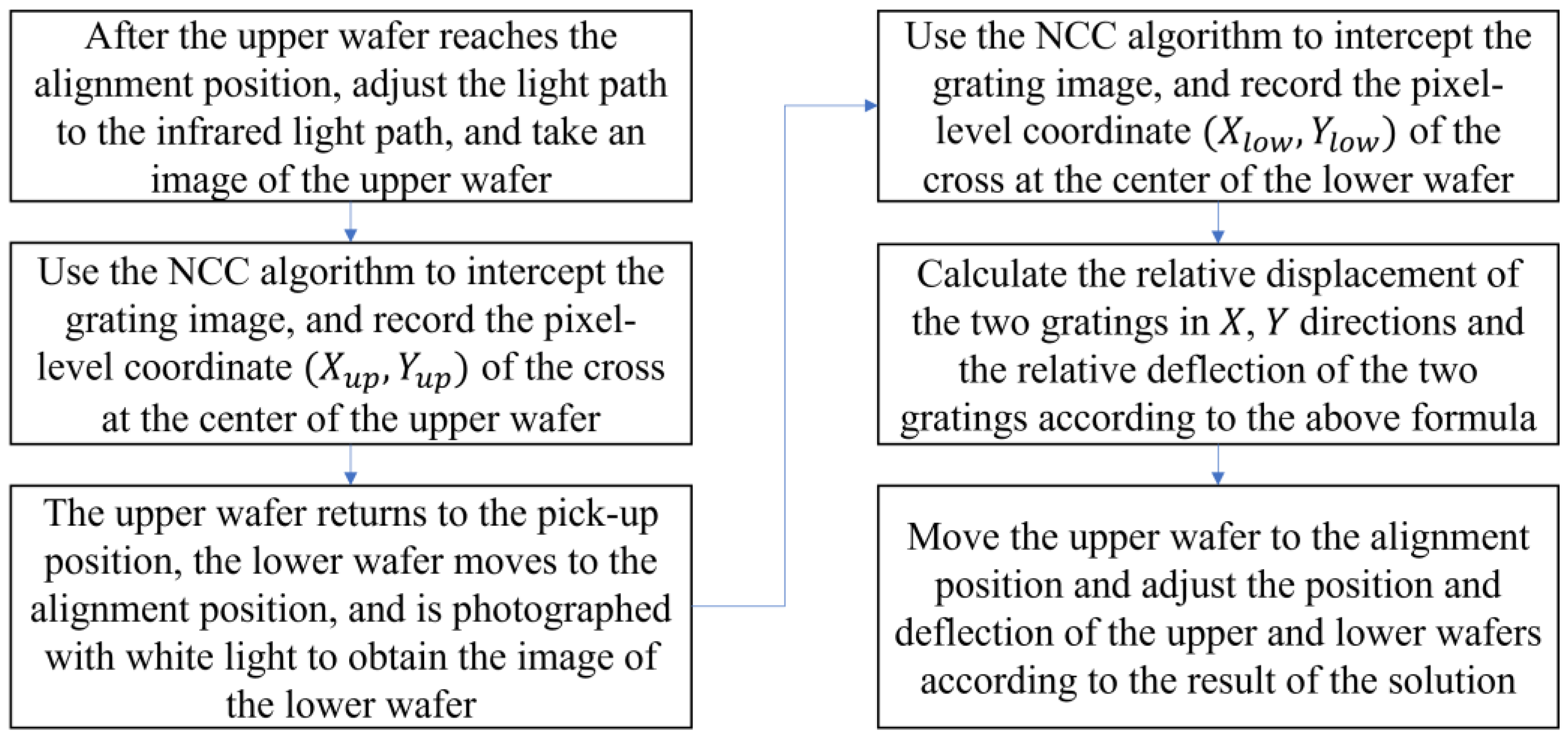
2.4. Position Deviation Correction
3. Mark Design
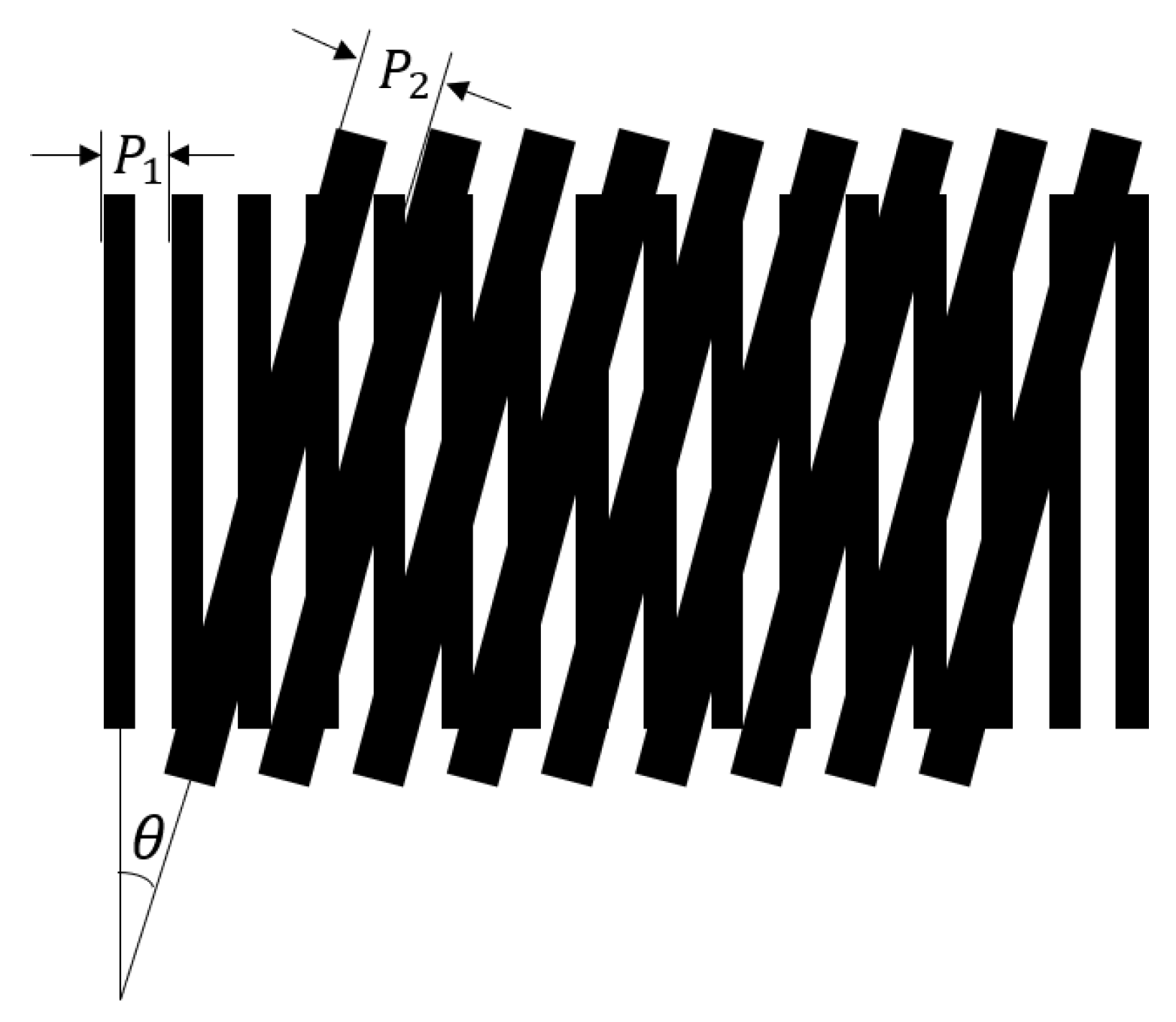
3.1. Moiré Fringe Formation Principle
3.2. Calculation of Moiré Fringes
3.3. Synthesis of Moiré Fringes
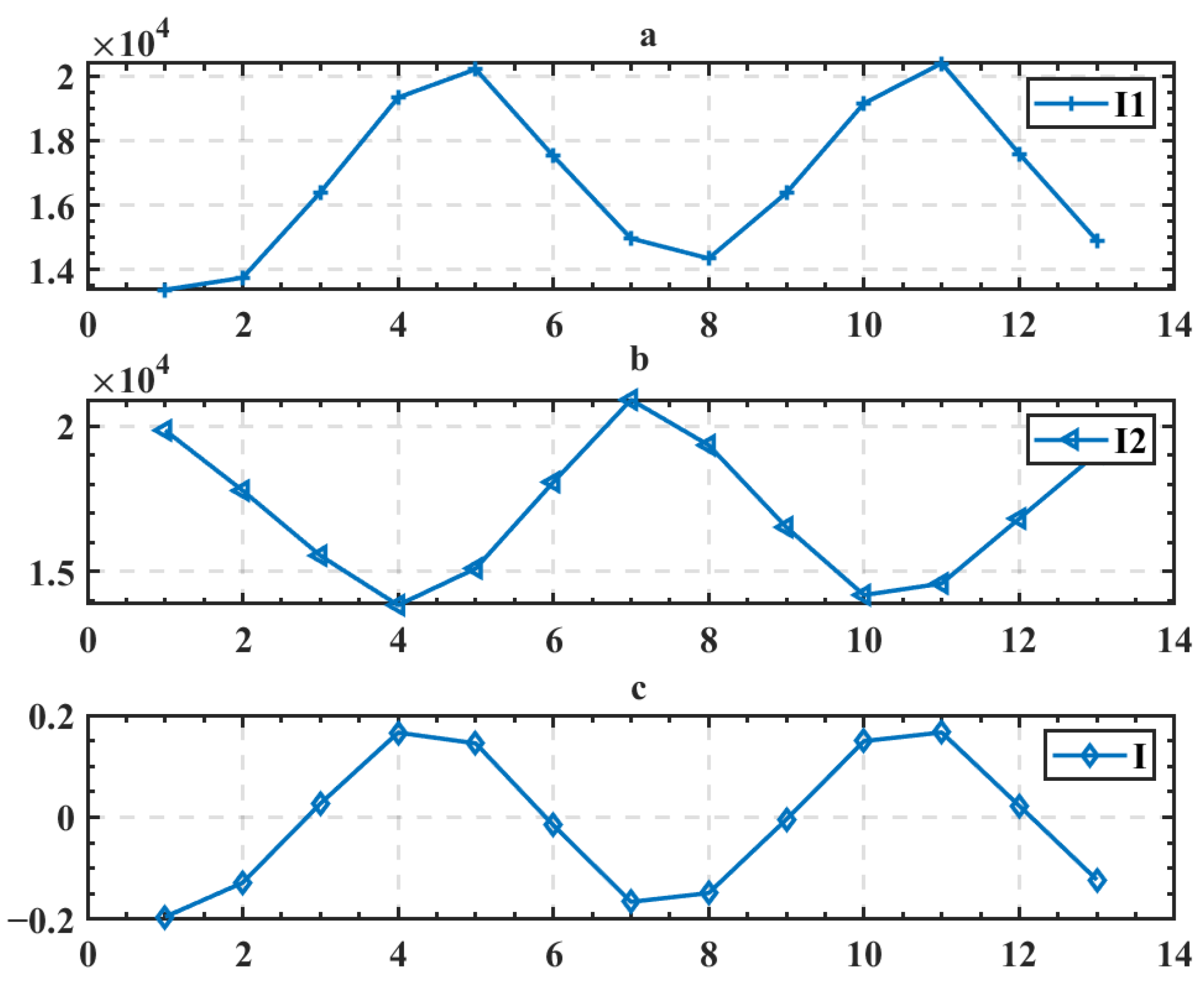
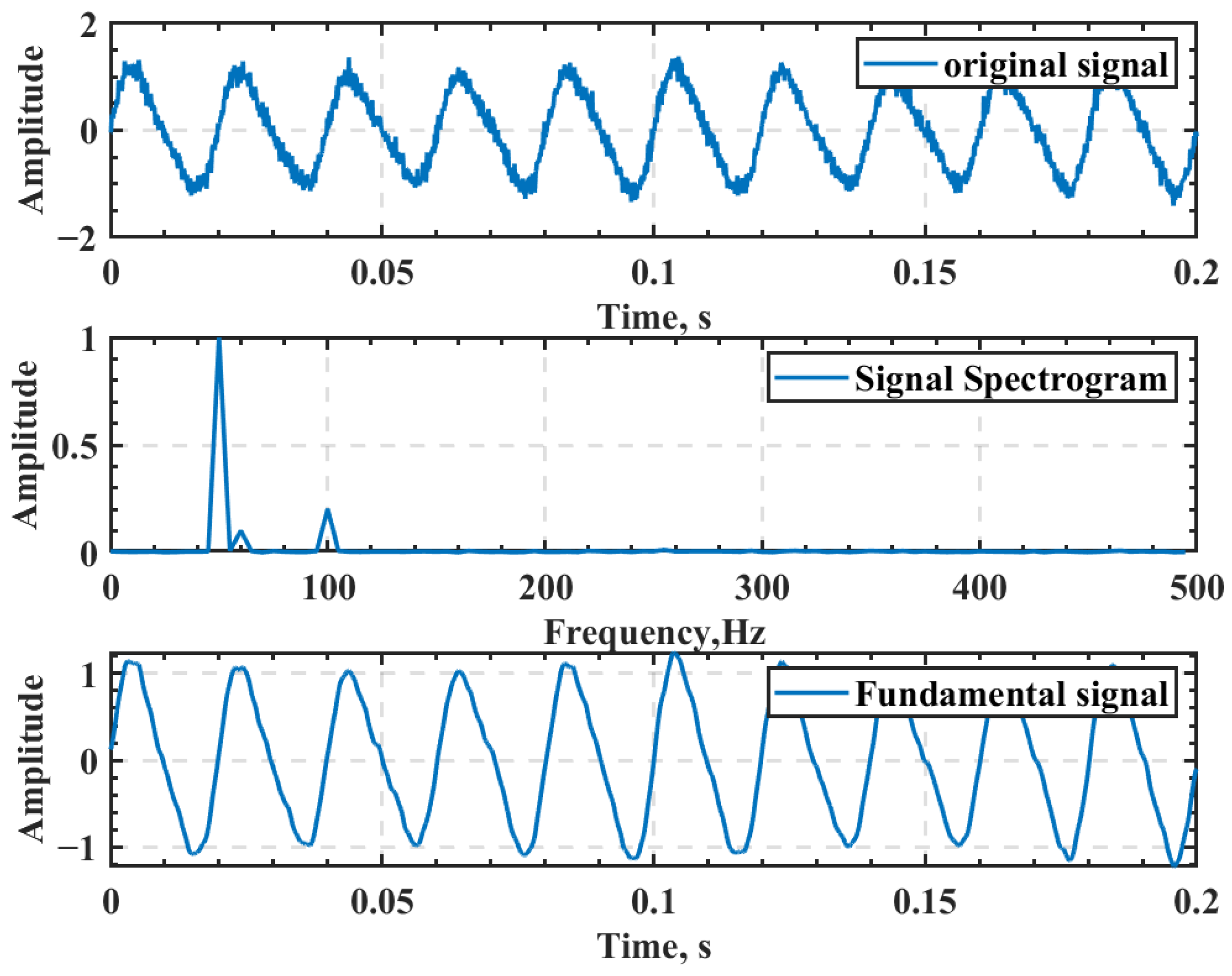
3.4. Solution of Grating Displacement
3.5. Design Results
4. Experimental Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Na, D.J.; Aung, K.O.; Choi, W.K.; Kida, T.; Ochiai, T.; Hashimoto, T.; Kimura, M.; Kata, K.; Yoon, S.W.; Yong, A.C.B. TSV MEOL (Mid End of Line) and Packaging Technology of Mobile 3D-IC Stacking. In Proceedings of the 2014 IEEE 64th Electronic Components and Technology Conference (ECTC), Orlando, FL, USA, 27–30 May 2014; pp. 596–600. [Google Scholar]
- Panigrahi, A.K.; Bonam, S.; Ghosh, T.; Vanjari, S.R.K.; Singh, S.G. Low Temperature, Low Pressure CMOS Compatible Cu—Cu Thermo-Compression Bonding with Ti Passivation for 3D IC Integration. In Proceedings of the 2015 IEEE 65th Electronic Components and Technology Conference (ECTC), San Diego, CA, USA, 26–39 May 2015; pp. 2205–2210. [Google Scholar]
- Lee, S.H.; Niklaus, F.; McMahon, J.J.; Yu, J.; Kumar, R.J.; Li, H.F.; Gutmann, R.J.; Cale, T.S.; Lu, J.Q. Fine keyed alignment and bonding for wafer-level 3D ICs. MRS Online Proc. Libr. 2006, 914. [Google Scholar] [CrossRef]
- Sugaya, I.; Mitsuishi, H.; Maeda, H.; Okada, M.; Okamoto, K. New Precision Alignment Methodology for CMOS Wafer Bonding. In Proceedings of the 2014 SOI-3D-Subthreshold Microelectronics Technology Unified Conference (S3S), IEEE, Milbrae, CA, USA, 6–9 October 2014; pp. 1–3. [Google Scholar]
- Wang, C.; Taniyama, S.; Wang, Y.H.; Suga, T. High-precision alignment for low-temperature wafer bonding. J. Electrochem. Soc. 2009, 156, H197–H201. [Google Scholar] [CrossRef]
- Wang, C.; Suga, T. A Novel Moiré Fringe Assisted Method for Nanoprecision Alignment in Wafer Bonding. In Proceedings of the 2009 59th Electronic Components and Technology Conference, IEEE, San Diego, CA, USA, 26–29 May 2009; pp. 872–878. [Google Scholar]
- Huang, B.; Wang, C.; Fang, H.; Zhou, S.; Suga, T. Moiré-based alignment using centrosymmetric grating marks for high-precision wafer bonding. Micromachines 2019, 10, 339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, C.; Suga, T. Moiré Method for Nanoprecision Wafer-to-Wafer Alignment: Theory, Simulation and Application. In Proceedings of the 2009 International Conference on Electronic Packaging Technology & High Density Packaging, Beijing, China, 10–13 August 2009; pp. 219–224. [Google Scholar]
- Castagna, R.; Lucchetta, D.E.; Rippa, M.; Xu, J.H.; Di Donato, A. Near-frequency photons Y-splitter. Appl. Mater. Today 2020, 19, 100636. [Google Scholar] [CrossRef]
- Bryngdahl, O. Polarization-grating moire. JOSA 1972, 62, 839–848. [Google Scholar] [CrossRef]
- Shalit, A.; Lucchetta, D.E.; Piazza, V.; Simoni, F.; Bizzarri, R.; Castagna, R. Polarization-dependent laser-light structured directionality with polymer composite materials. Mater. Lett. 2012, 81, 232–234. [Google Scholar] [CrossRef]
- King, M.C.; Berry, D.H. Photolithographic Mask Alignment Using Moiré Techniques. Appl. Opt. 1972, 11, 2455–2459. [Google Scholar] [CrossRef] [PubMed]
- Zhong, Z.; Li, C.; Li, S.; Li, P.; Ma, Q.; Zhao, H.; Zhang, J.; Wei, Y. High Speed, High Accuracy Displacement Extraction from Sinusoidal like Moiré Fringes in a Novel Optical Encoding Technology. In Metrology, Inspection, and Process Control for Microlithography XXXIV; SPIE: Bellingham, WA, USA, 2020; Volume 11325, pp. 549–558. [Google Scholar]
- Ri, S.; Tsuda, H.; Chang, K.; Hsu, S.; Lo, F.; Lee, T. Dynamic deformation measurement by the sampling Moiré method from video re-cording and its application to bridge engineering. Exp. Tech. 2020, 44, 313–327. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, Y.; Fujigaki, M. Moiré Methods For Shape, Displacement And Strain Analysis. Opt. Eng. 2011, 50, 101506. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Pfister, H. Discrete-Time Signal Processing. Lect. Note. Available online: http://pfister.ee.duke.edu/courses/ece485/dtsp.pdf (accessed on 16 November 2022).
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Yoo, J.C.; Han, T.H. Fast normalized cross-correlation. Circuits Syst. Signal Process. 2009, 28, 819–843. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, J.; Lu, S.; Zou, J.; Yang, K.; Zhu, Y.; Liao, K. High-Precision Wafer Bonding Alignment Mark Using Moiré Fringes and Digital Grating. Micromachines 2022, 13, 2159. https://doi.org/10.3390/mi13122159
Fan J, Lu S, Zou J, Yang K, Zhu Y, Liao K. High-Precision Wafer Bonding Alignment Mark Using Moiré Fringes and Digital Grating. Micromachines. 2022; 13(12):2159. https://doi.org/10.3390/mi13122159
Chicago/Turabian StyleFan, Jianhan, Sen Lu, Jianxiao Zou, Kaiming Yang, Yu Zhu, and Kaiji Liao. 2022. "High-Precision Wafer Bonding Alignment Mark Using Moiré Fringes and Digital Grating" Micromachines 13, no. 12: 2159. https://doi.org/10.3390/mi13122159