

A Highly Accurate Method for Measuring Response Time of MEMS Thermopiles
 ,
,
Abstract
:1. Introduction
2. Design and Working Principle
2.1. Response Time of Thermopile Sensors
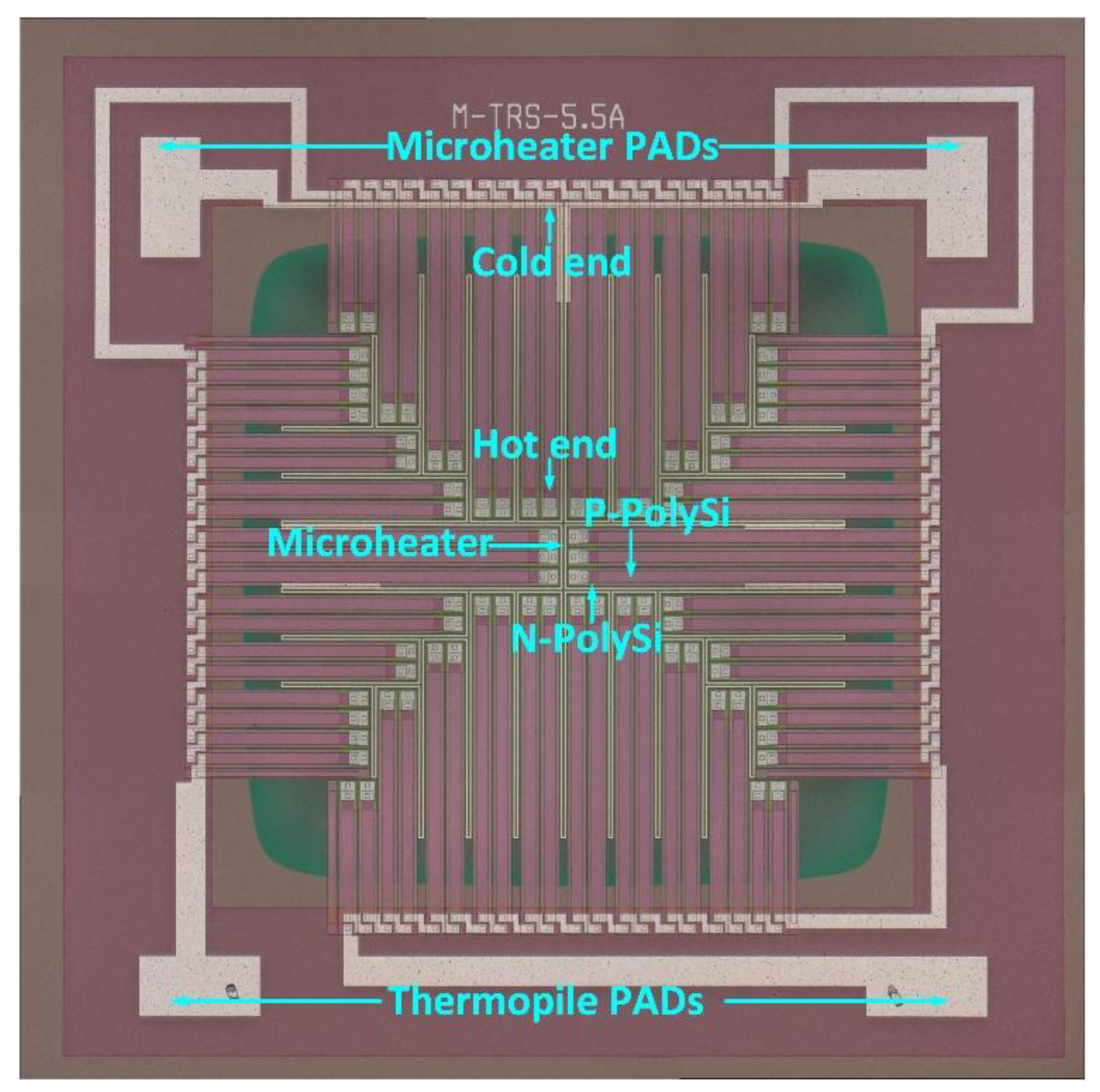
2.2. Structure Design of the Thermopile Sensor
3. Results and Discussion
3.1. Effects of Microheater Materials
3.2. Simulation of Response Time
3.3. Measurement System for Response Time
3.3.1. A Chopper—Based System
3.3.2. A Microheater—Based System
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, D.; Wang, Y.; Xiong, B.; Li, T. MEMS-based thermoelectric infrared sensors: A review. Front. Mech. Eng. 2017, 12, 557–566. [Google Scholar] [CrossRef]
- Xu, D.; Xiong, B.; Wang, Y.; Li, T. Robust Array-Composite Micromachined Thermopile IR Detector by CMOS Technology. IEEE Electron Device Lett. 2011, 32, 1761–1763. [Google Scholar] [CrossRef]
- Gu, N.; Yang, B.; Zhang, T. Dynamic Fuzzy Background Removal for Indoor Human Target Perception Based on Thermopile Array Sensor. IEEE Sens. J. 2020, 20, 67–76. [Google Scholar] [CrossRef]
- Popa, D.; Ali, S.Z.; Hopper, R.; Dai, Y.; Udrea, F. Smart CMOS mid-infrared sensor array. Opt. Lett. 2019, 44, 4111–4114. [Google Scholar] [CrossRef] [PubMed]
- Ke, W.; Liu, M.; Li, T.; Wang, Y. MEMS thermal gas flow sensor with self-test function. J. Micromech. Microeng. 2019, 29, 125009. [Google Scholar] [CrossRef]
- Wang, S.; Xue, D.; Wang, J.; Li, X. Highly Sensitive p+Si/Al Thermopile-Based Gas Flow Sensors by Using Front-Sided Bulk Micromachining Technology. IEEE Trans. Electron Devices 2020, 67, 1781–1786. [Google Scholar] [CrossRef]
- Xue, D.; Song, F.; Wang, J.; Li, X. Single-Side Fabricated p+Si/Al Thermopile-Based Gas Flow Sensor for IC-Foundry-Compatible, High-Yield, and Low-Cost Volume Manufacturing. IEEE Trans. Electron Devices 2019, 66, 821–824. [Google Scholar] [CrossRef]
- Tian, W.; Wang, Y.; Zhou, H.; Wang, Y.L.; Li, T. Micromachined Thermopile Based High Heat Flux Sensor. J. Microelectromech. Syst. 2020, 29, 36–42. [Google Scholar] [CrossRef]
- Wang, J.; Tian, W.; Wang, Y.; Zhou, H.; He, Y.; Wang, Y.; Li, T. Micromachined Thermocouple for Rapid Detection of Ultrahigh Heat Flux at High Temperature. IEEE Trans. Ind. Electron. 2022, 69, 2099–2106. [Google Scholar] [CrossRef]
- Yang, K.; Yang, Q.T.; Zhu, X.X.; Wang, H.; Zhu, T.; Liu, J.H. A molecular dynamics simulation on the static calibration test of a revised thin-film thermopile heat-flux sensor. Measurement 2020, 150, 107039. [Google Scholar] [CrossRef]
- Ashraf, S.; Mattsson, C.G.; Thungstrom, G.; Rodjegard, H. Integration of an interferometric IR absorber into an epoxy membrane based CO2 detector. J. Instrum. 2014, 9, C05035. [Google Scholar] [CrossRef]
- de Hoyos-Vazquez, F.F.; Carreno-de Leon, M.C.; Serrano-Nunez, E.O.; Flores-Alamo, N.; Rios, M.J.S. Development of a novel non-dispersive infrared multi sensor for measurement of gases in sediments. Sens. Actuator B-Chem. 2019, 288, 486–492. [Google Scholar] [CrossRef]
- Roncaglia, A.; Mancarella, F.; Cardinali, G.C. CMOS-compatible fabrication of thermopiles with high sensitivity in the 3–5 mu m atmospheric window. Sens. Actuator B-Chem. 2007, 125, 214–223. [Google Scholar] [CrossRef]
- Vincent, T.A.; Gardner, J.W. A low cost MEMS based NDIR system for the monitoring of carbon dioxide in breath analysis at ppm levels. Sens. Actuator B-Chem. 2016, 236, 954–964. [Google Scholar] [CrossRef] [Green Version]
- Yoo, K.P.; Hong, H.P.; Lee, M.J.; Min, S.J.; Park, C.W.; Choi, W.S.; Min, N.K. Fabrication, characterization and application of a microelectromechanical system (MEMS) thermopile for non-dispersive infrared gas sensors. Meas. Sci. Technol. 2011, 22, 115206. [Google Scholar] [CrossRef]
- Sun, X.; Xu, D.H.; Xiong, B.; Wang, Y.L. Integrated thermopile vacuum gauge with an XeF2 dry-etching process. Proc. Inst. Mech. Eng. Part N J. Nanoeng. Nanosyst. 2014, 228, 154–158. [Google Scholar] [CrossRef]
- Sun, X.; Xu, D.H.; Xiong, B.; Wu, G.Q.; Wang, Y.L. A wide measurement pressure range CMOS-MEMS based integrated thermopile vacuum gauge with an XeF2 dry-etching process. Sens. Actuator A Phys. 2013, 201, 428–433. [Google Scholar] [CrossRef]
- Shen, T.W.; Lee, Y.C.; Chang, K.C.; Fang, W.L. Responsivity enhancement of CMOS-MEMS thermoelectric infrared sensor by heat transduction absorber design. In Proceedings of the 2018 IEEE Micro Electro Mechanical Systems (MEMS), Belfast, UK, 21–25 January 2018. [Google Scholar]
- Zhang, C.C.; Mao, H.Y.; Bai, L.L.; Xiong, J.J.; Wang, W.B.; Chen, D.P. A response time measurement method for MEMS IR detectors. J. Infrared Millim. Waves 2020, 39, 619–625. [Google Scholar]
- Bao, A.D.; Lei, C.; Mao, H.Y.; Li, R.R.; Guan, Y.H. Study on A High Performance MEMS Infrared Thermopile Detector. Micromachines 2019, 10, 877. [Google Scholar] [CrossRef] [Green Version]
- Hou, H.G.; Yang, J.; Liu, G.W.; Liu, J.L.; Abbas, M.; Hussain, S.; Shao, H.C.; Qiao, G.J.; Ghfar, A.A.; Ouladsmane, M.; et al. Designing Optically & Utilization of Thermopile Chip with Resonant Cavity Absorber Structure as IR Absorber. Coatings 2021, 11, 302. [Google Scholar]
- Lei, C.; Mao, H.Y.; Ou, W.; Xue, C.Y.; Tang, L.C.; Yang, T.; Chen, D.P.; Xiong, J.J. A CMOS-MEMS IR device based on double-layer thermocouples. Microsyst. Technol. 2016, 22, 1163–1171. [Google Scholar] [CrossRef]
- Lei, C.; Mao, H.Y.; Yang, Y.D.; Ou, W.; Xue, C.Y.; Yao, Z.; Ming, A.J.; Wang, W.B.; Wang, L.; Hu, J.D.; et al. A double-end-beam based infrared device fabricated using CMOS-MEMS process. Sens. Rev. 2016, 36, 240–248. [Google Scholar] [CrossRef]
- Shen, T.W.; Chang, K.C.; Sun, C.M.; Fang, W.L. Performance enhance of CMOS-MEMS thermoelectric infrared sensor by using sensing material and structure design. J. Micromech. Microeng. 2019, 29, 025007. [Google Scholar] [CrossRef]
- Xu, D.; Xiong, B.; Wang, Y. Design, Fabrication and Characterization of a Front-etched Micromachined Thermopile for IR Detection. J. Micromech. Microeng. 2010, 20, 115004. [Google Scholar] [CrossRef]
- Zhou, H.; Kropelnicki, P.; Tsai, J.M.; Lee, C. Development of a Thermopile Infrared Sensor Using Stacked Double Polycrystalline Silicon Layers Based on The CMOS Process. J. Micromech. Microeng. 2013, 23, 065026. [Google Scholar] [CrossRef]
- Ke, W.J.; Wang, Y.; Zhou, H.; Li, T.; Wang, Y.L. Design, Fabrication, and Characterization of a High-Performance CMOS-Compatible Thermopile Infrared Detector with Self-Test Function. J. Micromech. Microeng. 2018, 28, 12507. [Google Scholar] [CrossRef]
- Yong, R.X.; Zhang, G.J.; Qiang, T.; Jiang, Y.F. Highly Sensitive Micromachined Thermopile Infrared Sensor System with Chopper Operational Amplifier. IEEE Trans. Electron Devices 2021, 68, 4497–4503. [Google Scholar] [CrossRef]
- Kuo, J.T.W.; Yu, L.; Meng, E. Micromachined Thermal Flow Sensors—A Review. Micromachines 2012, 3, 550–573. [Google Scholar] [CrossRef] [Green Version]
- Hou, Y.; Fu, J.Y.; Lu, Y.H.; Liu, J.B.; Zhang, J.; Chen, D.P. An In-Situ Self-Test Method for Measuring Absorptivity of Film-Type Uncooled Infrared Detectors. J. Microelectromech. Syst. 2022, 31, 116–123. [Google Scholar] [CrossRef]
- Lee, J.; Doh, I. Development of chip calorimeter based on Bi/Al thermopile for biological sample measurement. Int. J. Nanotechnol. 2019, 16, 281–288. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Length (µm) | Width (µm) | Thickness (µm) | Interval (µm) |
|---|---|---|---|---|
| N—PolySi | 300–620 | 30 | 0.42 | 3 |
| P—PolySi | 260–580 | 18 | 0.42 | 15 |
| Microheater | / | 3 | 0.5 | 3 |
| Materials | (Ω.m) | m (10−4/K) | (kg/m3) | (J/(kg.K)) | (W/(m.K)) |
|---|---|---|---|---|---|
| Al | 2.69 × 10−8 | 42.0 | 2700 | 904 | 237 |
| Cu | 1.67 × 10−8 | 43.0 | 8960 | 384 | 401 |
| Au | 2.30 × 10−8 | 39.0 | 19,300 | 129 | 317 |
| Fe | 9.71 × 10−8 | 65.1 | 7860 | 449 | 80.2 |
| Ni | 6.84 × 10−8 | 68.1 | 8900 | 445 | 90.7 |
| Pt | 10.6 × 10−8 | 39.2 | 21,450 | 133 | 71.6 |
| Ag | 1.63 × 10−8 | 41.0 | 10,500 | 235 | 429 |
| W | 5.50 × 10−8 | 46.0 | 19,350 | 132 | 174 |
| PolySi | 4 × 10−6∼1 × 10−1 | −250∼10 | 2320 | 678 | 31 |
| Reference | Resistance (KΩ) | Thermocouples | t (ms) | Test Method |
|---|---|---|---|---|
| 20 | 485.5 | N—Poly/P—Poly | 14.46 | Chopper |
| 22 | 458.5 | N—Poly/P—Poly | 14.46 | Chopper |
| 25 | 124.7 | N—Poly/Al | 16.8 | Chopper |
| 26 | 29 | P—Poly/Al | 126 | Chopper |
| 28 | 270 | Al/P—Poly | 10 | Chopper |
| This work | 195 | N—poly/P—poly | 12.7 | Chopper |
| This work | 195 | N—Poly/P—Poly | 6.9 | Microheater |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, Z.; Shi, M.; Zhou, N.; Zhang, C.; Ding, X.; Ni, Y.; Chen, D.; Mao, H. A Highly Accurate Method for Measuring Response Time of MEMS Thermopiles. Micromachines 2022, 13, 1717. https://doi.org/10.3390/mi13101717
Xiang Z, Shi M, Zhou N, Zhang C, Ding X, Ni Y, Chen D, Mao H. A Highly Accurate Method for Measuring Response Time of MEMS Thermopiles. Micromachines. 2022; 13(10):1717. https://doi.org/10.3390/mi13101717
Chicago/Turabian StyleXiang, Zeqing, Meng Shi, Na Zhou, Chenchen Zhang, Xuefeng Ding, Yue Ni, Dapeng Chen, and Haiyang Mao. 2022. "A Highly Accurate Method for Measuring Response Time of MEMS Thermopiles" Micromachines 13, no. 10: 1717. https://doi.org/10.3390/mi13101717