
Optimization of the Fluidic-Based Assembly for Three-Dimensional Construction of Multicellular Hydrogel Micro-Architecture in Mimicking Hepatic Lobule-like Tissues


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
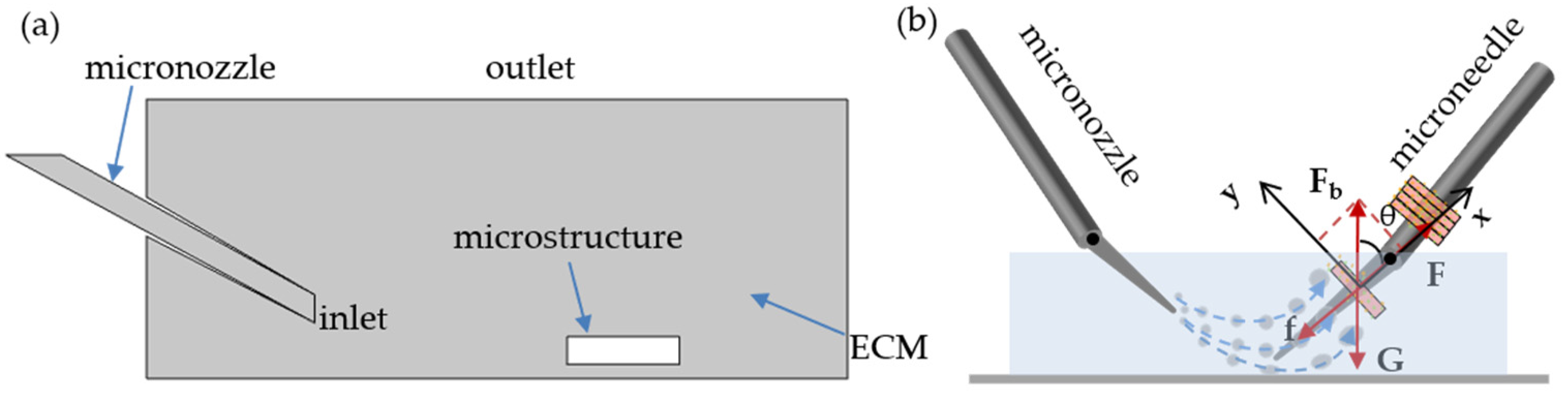
2.1. Motion Analysis of Module
2.2. Simulation Model Creating
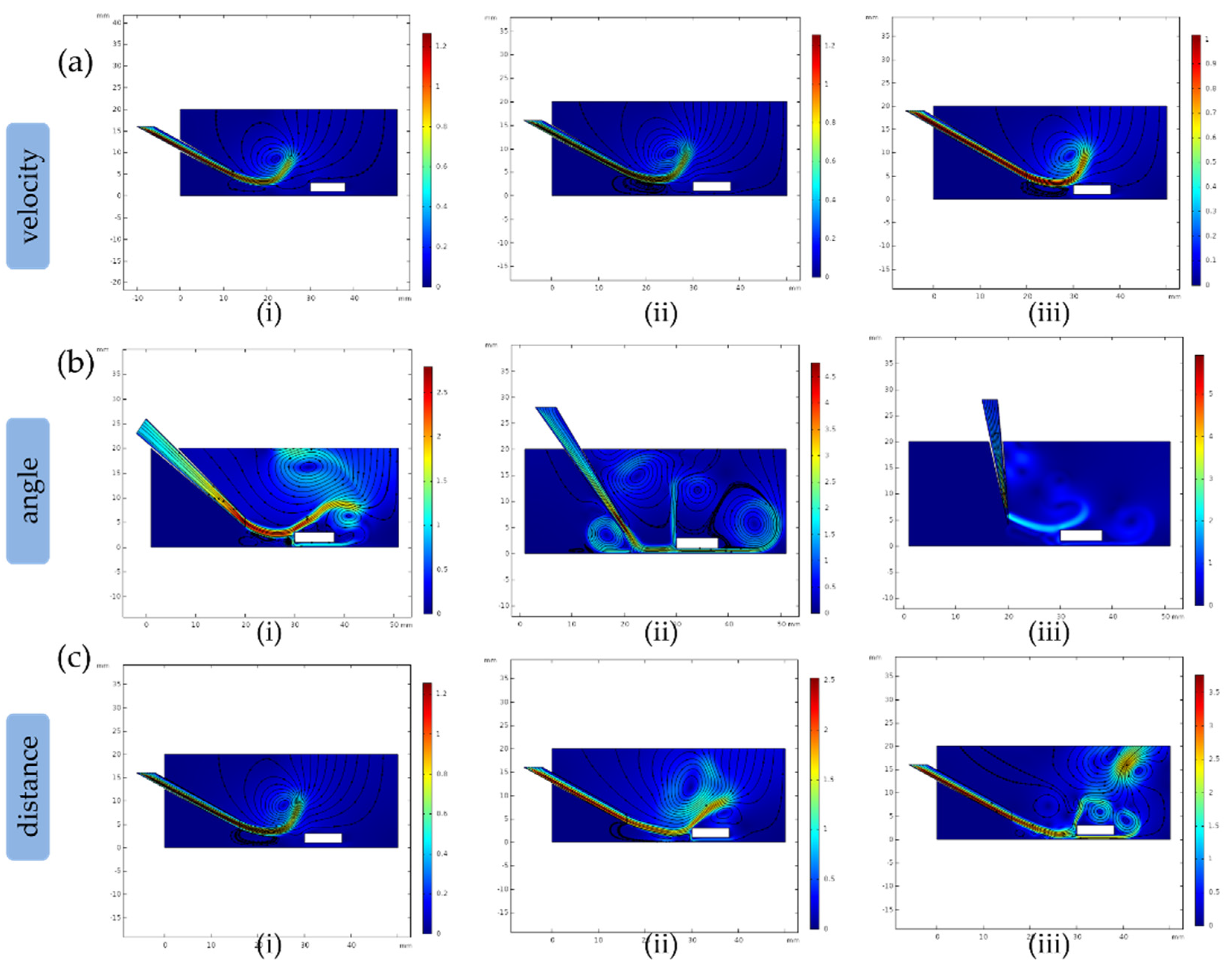
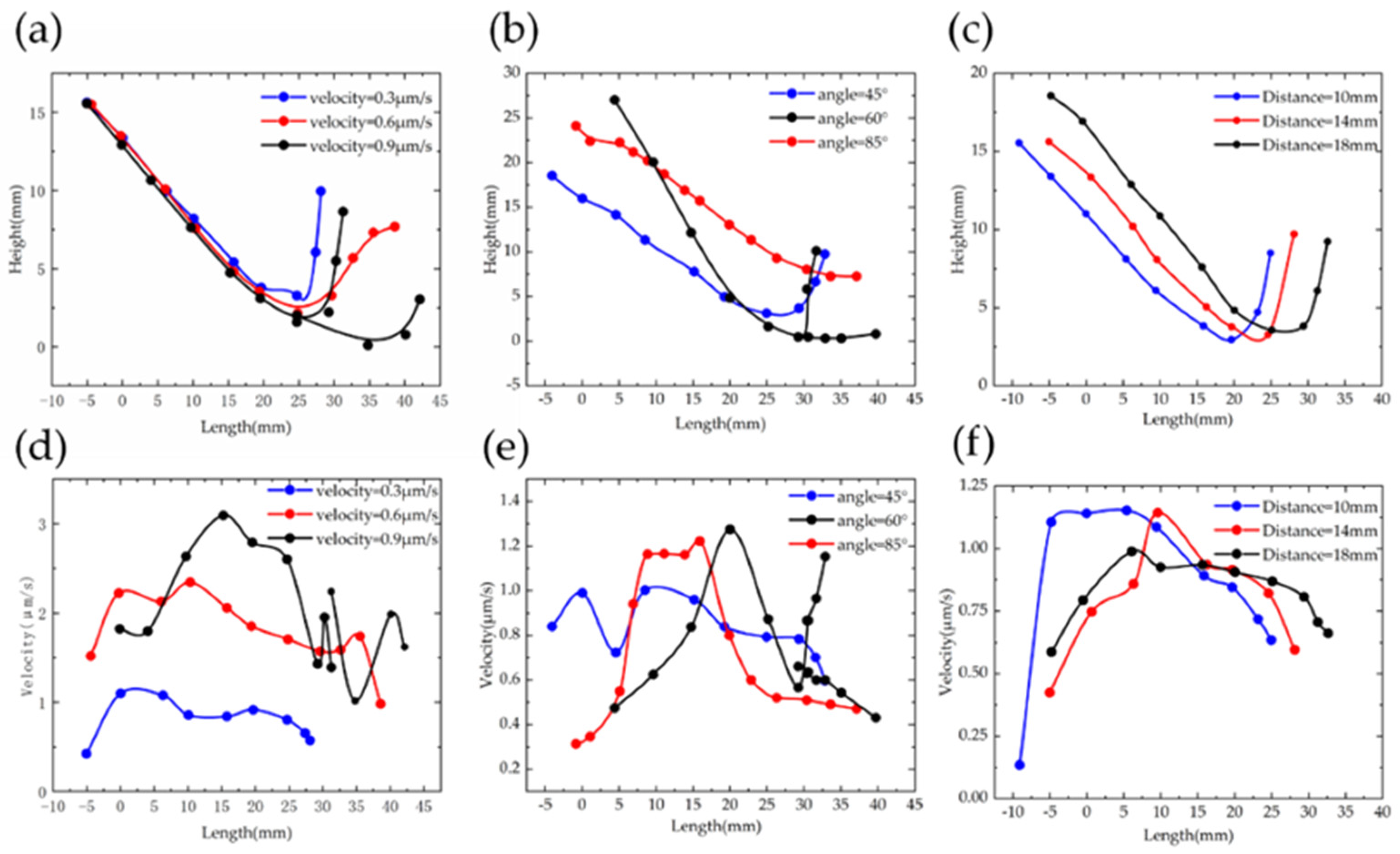
- The velocity of microflow:The value of velocity determines the power of microflow and it affects the movement of the module directly. For analyzing velocity, parameters were 0.3 μm/s, 0.6 μm/s and 0.9 μm/s; we left the other two parameters (angles and distances) unchanged. The physical model is selected as the laminar flow interface.
- The angle between the micronozzle and the bottom plate:The angle determines the trajectory of the microflow. The changes in trajectory could affect the force applied on the module. Therefore, it is essential to choose a proper tilt angle to obtain a trajectory for avoiding loss of the force. We only changed the tilt angle on 30, 45 and 85 degrees to observe the variations of trajectory.
- The distance between the two micromanipulators:The microflow will lose energy due to the viscosity of fluid before pushing the module. In theory, the closer the micronozzle and the microneedle are, the greater force applied on the module, which is helpful to push the microstructure through the microneedle. We moved the micronozzle approach to the module at the distances of 18 mm, 16 mm and 14 mm and observed the force applied on the module.
3. Results and Discussions
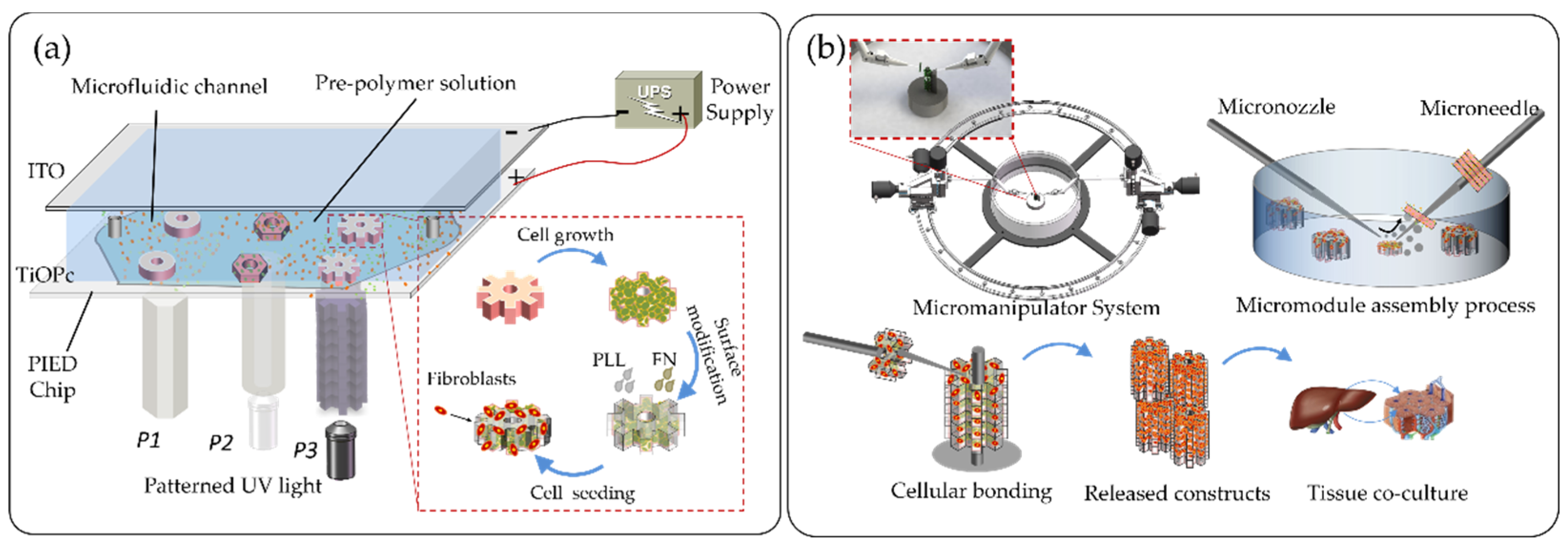
3.1. Equipment Setup
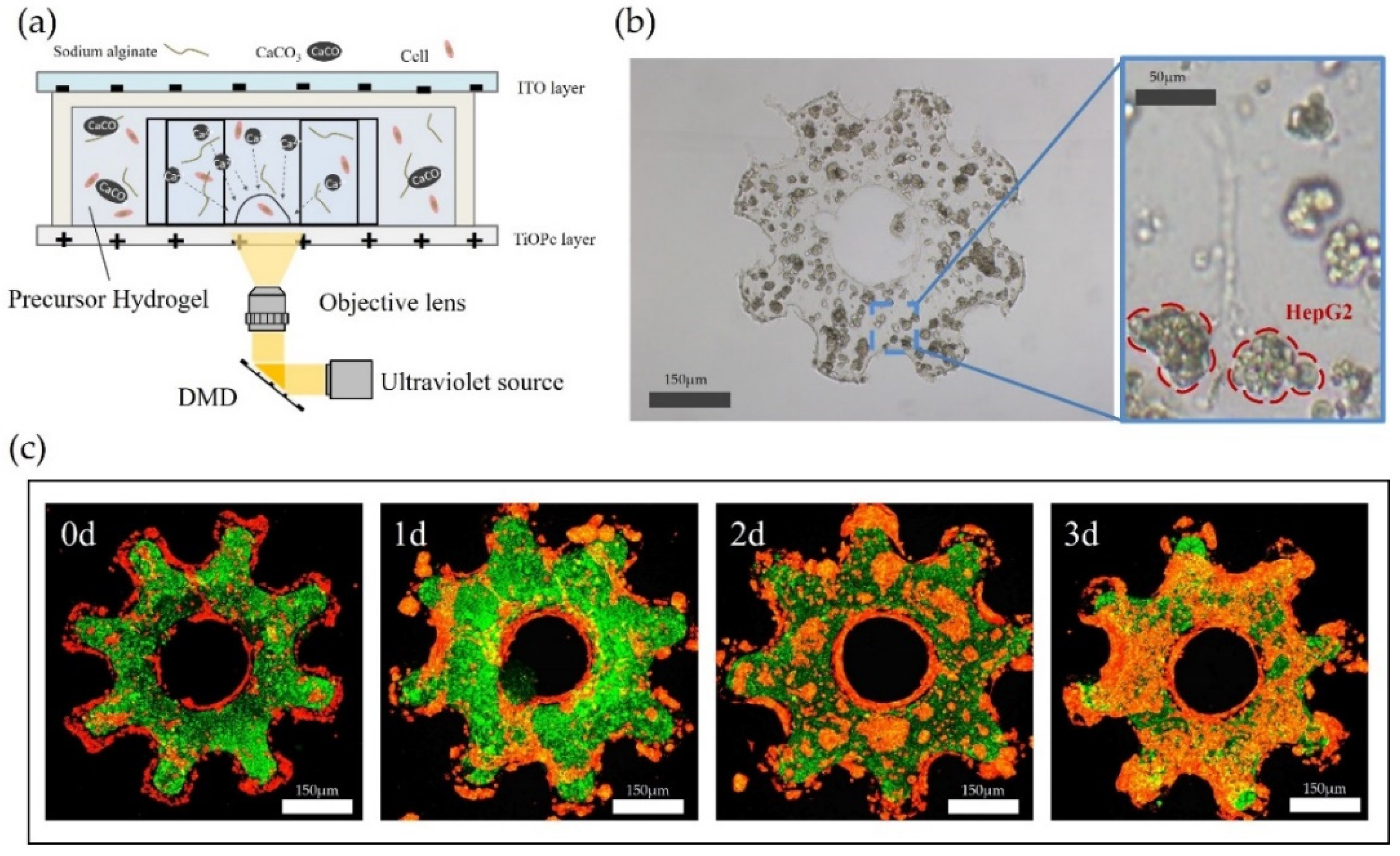
3.2. Materials Preparation and Microstructure Fabrication
3.3. The Velocity of Microflow
3.4. The Tilt Angle of the Micropipette
3.5. The Spacing between Two Manipulators
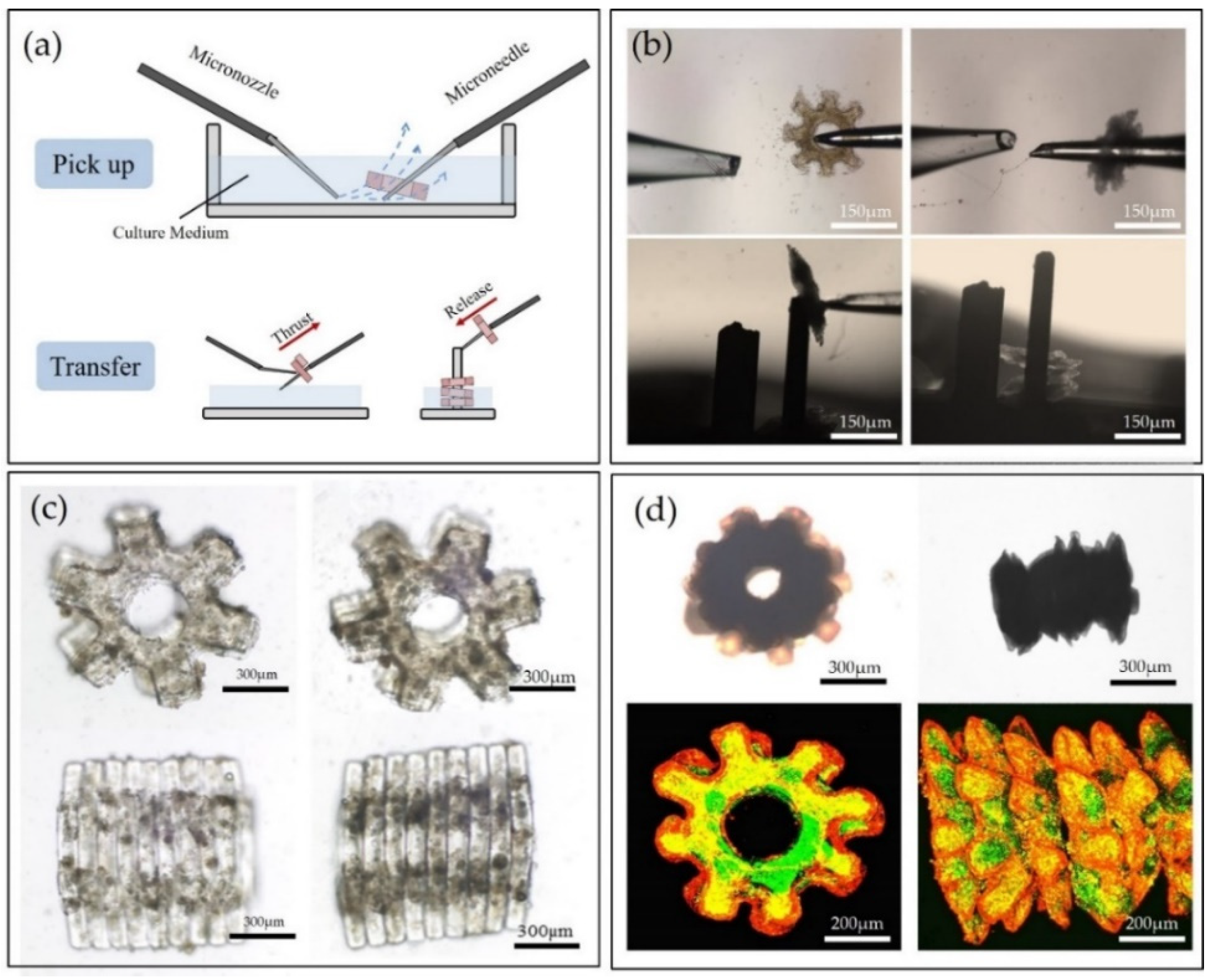
3.6. Module Assembly
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, C.P.; Lu, J.; Seon, H.; Lee, A.; Flanagan, L.A.; Kim, H.-Y.; Putnam, A.; Jeon, N.L. Engineering microscale cellular niches for three-dimensional multicellular co-cultures. Lab Chip 2009, 9, 1740–1748. [Google Scholar] [CrossRef] [Green Version]
- Morimoto, Y.; Hsiao, A.Y.; Takeuchi, S. Point-, line-, and plane-shaped cellular constructs for three-dimensional tissue assembly. Adv. Drug Deliv. Rev. 2015, 95, 29–39. [Google Scholar] [CrossRef]
- Dario, P.; Carrozza, M.C.; Benvenuto, A.; Menciassi, A. Micro-systems in biomedical applications. J. Micromech. Microeng. 2000, 10, 235–244. [Google Scholar] [CrossRef] [Green Version]
- Chu, H.K.H.; Huan, Z.; Mills, J.K.; Yang, J.; Sun, D. Three-dimensional cell manipulation and patterning using dielectrophoresis via a multi-layer scaffold structure. Lab Chip 2015, 15, 920–930. [Google Scholar] [CrossRef] [PubMed]
- Saito, J.; Kaneko, M.; Ishikawa, Y.; Yokoyama, U. Challenges and Possibilities of Cell-Based Tissue-Engineered Vascular Grafts. Cyborg Bion. Syst. 2021, 2021. [Google Scholar] [CrossRef]
- Wang, H.; Huang, Q.; Shi, Q.; Yue, T.; Chen, S.; Nakajima, M.; Takeuchi, M.; Fukuda, T. Automated Assembly of Vascular-like Microtube with Repetitive Single-step Contact Manipulation. IEEE Trans. Biomed. Eng. 2015, 62, 2620. [Google Scholar] [CrossRef] [PubMed]
- Elbert, D.L. Bottom-up Tissue Engineering. Curr. Opin. Biotechnol. 2011, 22, 674–680. [Google Scholar] [CrossRef] [Green Version]
- Kademhosseini, A.; Vacanti, J.P.; Langer, R. Progress in Tissue Engineering. Sci. Am. 2009, 300, 64–71. [Google Scholar] [CrossRef]
- Gurkan, U.A.; Tasoglu, S.; Kavaz, D. Emerging Technologies for Assembly of Microscale Hydrogels. Adv. Healthcare Mater. 2012, 1, 149–158. [Google Scholar] [CrossRef]
- McGuigan, A.P.; Seflon, M.V. Vascularized Organoid Engineered by Modular Assembly Enables Blood Perfusion. Proc. Natl. Acad. Sci. USA 2006, 103, 11461–11466. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Li, J.; Cui, J.; Shi, Q.; Zheng, Z.; Sun, T.; Huang, Q.; Fukuda, T. Microrobotic Assembly of Shape-Customized Three-Dimensional Microtissues Based on Surface Tension Driven Self-Alignment. IEEE Trans. Nanotechnol. 2018, 17, 684–687. [Google Scholar] [CrossRef]
- Neal, D.; Sakar, M.S.; Ong, L.L.; Harry, A.H. Formation of elongated fascicle-inspired three-dimensional tissues consisting of high density, aligned cells using sacrificial outer molding. Lab Chip 2014, 14, 1907. [Google Scholar] [CrossRef]
- Lin, Y.H.; Yang, Y.W.; Chen, Y.D.; Wang, S.S.; Chang, Y.H.; Wu, M.H. The Application of an Optically Switched Dielectrophoretic (ODEP) Force for the Manipulation and Assembly of Cell-encapsulating Alginate Microbeads in a Microfluidic Perfusion Cell Culture System for Bottom-up Tissue Engineering. Lab Chip 2012, 12, 1164. [Google Scholar] [CrossRef]
- Allen, J.W.; Bhatia, S.N. Engineering liver therapies for the future. Tissue Eng. 2002, 8, 725–737. [Google Scholar] [CrossRef]
- Liu, Z.; Takeuchi, M.; Nakajima, M.; Hasegawa, Y.; Huang, Q.; Fukuda, T. Shape-controlled high cell-density microcapsules by electrodeposition. Acta Biomater. 2016, 37, 93–100. [Google Scholar] [CrossRef] [PubMed]
- Ho, C.-T.; Lin, R.-Z.; Chen, R.-J.; Chin, C.-K.; Gong, S.-E.; Chang, H.-Y.; Peng, H.-L.; Hsu, L.; Yew, T.-R.; Chang, S.-F.; et al. Liver-cell patterning lab chip: Mimicking the morphology of liver lobule tissue. Lab Chip 2013, 13, 3578–3587. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cui, J.; Wang, H.P.; Shi, Q.; Sun, T. Pulsed Microfluid Force-Based On-Chip Modular Fabrication for Liver Lobule-Like 3D Cellular Models. Cyborg Bion. Syst. 2021, 2021. [Google Scholar] [CrossRef]
- Du, Y.; Lo, E.; Ali, S.; Khademhosseini, A. Directed assembly of cell-laden microgels for fabrication of three-dimensional tissue constructs. Proc. Natl. Acad. Sci. USA 2008, 105, 9522–9527. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, Z.; Wang, H.; Li, J.; Shi, Q.; Cui, J.; Sun, T.; Huang, Q.; Fukuda, T. 3D Construction of Shape-Controllable Tissues through Self-Bonding of Multicellular Microcapsules. ACS Appl. Mater. Interfaces 2019, 11, 22950–22961. [Google Scholar] [CrossRef] [PubMed]
- Tszeng, T.; Kobayashi, S. Stress analysis in solidification processes: Application to continuous casting. Int. J. Mach. Tools Manuf. 1989, 29, 121–140. [Google Scholar] [CrossRef]
- Keating, D.J.; He, Y.; Finch, N.; Marchetti, J. Numerical simulation of micro-assembly of MEMS devices and post assembly electromechanical actuation. Proc. SPIE 2000, 4228, 63–70. [Google Scholar]
- Laksanacharoen, S.; Pollack, A.J.; Nelson, G.M.; Quinn, R.D.; Ritzmann, R.E. Biomechanics and Simulation of Cricket for Microrobot Design. In Proceedings of the 2000 ICRA Millennium Conference, IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1088–1094. [Google Scholar]
- Güdükbay, U.; Bayraktar, S.; Koca, Ç.; Özguc, B. Particle-based simulation of the interaction between fluid and knitwear. Signal Image Video Process. 2012, 8, 415–422. [Google Scholar] [CrossRef]
- Rodgers, T.M.; Bishop, J.E.; Madison, J.D. Direct numerical simulation of mechanical response in synthetic additively manufactured microstructures. Model. Simul. Mater. Sci. Eng. 2018, 26, 5. [Google Scholar] [CrossRef]
- Song, R.; Liu, J.; Cui, M. Single- and two-phase flow simulation based on equivalent pore network extracted from micro-CT images of sandstone core. Springer Plus 2016, 5, 817. [Google Scholar] [CrossRef] [Green Version]
- Yue, T.; Nakajima, M.; Fukuda, T.; Hu, C.; Huang, Q.; Fukuda, T. On-chip Self-assembly of Cell Embedded Microstructures to Vascular-like Microtubes. Lab Chip 2014, 14, 1151–1161. [Google Scholar] [CrossRef]
- Chung, S.E.; Park, W.; Shin, S.; Lee, S.A.; Kwon, S. Guided and fluidic self-assembly of microstructures using railed microfluidic channels. Nat. Mater. 2008, 7, 581–587. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Wang, H.; Shi, Q.; Ferraro, P.; Sun, T.; Dario, P.; Huang, Q.; Fukuda, T. Permeable hollow 3D tissue-like constructs engineered by on-chip hydrodynamic-driven assembly of multicellular hierarchical micromodules. Acta Biomater. 2020, 113, 328–338. [Google Scholar] [CrossRef] [PubMed]
- Cui, J.; Wang, H.; Zheng, Z.; Shi, Q.; Sun, T.; Huang, Q.; Fukuda, T. Fabrication of perfusable 3D hepatic lobule-like constructs through assembly of multiple cell type laden hydrogel microstructures. Biofabrication 2018, 11, 015016. [Google Scholar] [CrossRef]
- Nichol, J.W.; Khademhosseini, A. Modular tissue engineering: Engineering biological tissues from the bottom up. Soft Matter 2009, 5, 1312–1319. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Z.; Takeuchi, M.; Nakajima, M.; Hu, C.; Hasegawa, Y.; Huang, Q.; Fukuda, T. Three-dimensional hepatic lobule-like tissue constructs using cell-microcapsule technology. Acta Biomater. 2017, 50, 178–187. [Google Scholar] [CrossRef]
- Ozawa, F.; Ino, K.; Takahashi, Y.; Shiku, H.; Matsue, T. Electrodeposition of alginate gels for construction of vascular-like structures. J. Biosci. Bioeng. 2013, 115, 459–461. [Google Scholar] [CrossRef] [PubMed]
- Huang, S.-H.; Hsueh, H.-J.; Jiang, Y.-L. Light-addressable electrodeposition of cell-encapsulated alginate hydrogels for a cellular microarray using a digital micromirror device. Biomicrofluidics 2011, 5, 034109. [Google Scholar] [CrossRef] [PubMed] [Green Version]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Q.; Hou, Y.; Meng, F.; Wang, H. Optimization of the Fluidic-Based Assembly for Three-Dimensional Construction of Multicellular Hydrogel Micro-Architecture in Mimicking Hepatic Lobule-like Tissues. Micromachines 2021, 12, 1129. https://doi.org/10.3390/mi12091129
Liang Q, Hou Y, Meng F, Wang H. Optimization of the Fluidic-Based Assembly for Three-Dimensional Construction of Multicellular Hydrogel Micro-Architecture in Mimicking Hepatic Lobule-like Tissues. Micromachines. 2021; 12(9):1129. https://doi.org/10.3390/mi12091129
Chicago/Turabian StyleLiang, Qian, Yaozhen Hou, Fei Meng, and Huaping Wang. 2021. "Optimization of the Fluidic-Based Assembly for Three-Dimensional Construction of Multicellular Hydrogel Micro-Architecture in Mimicking Hepatic Lobule-like Tissues" Micromachines 12, no. 9: 1129. https://doi.org/10.3390/mi12091129