
Dielectrowetting Control of Capillary Force (Cheerios Effect) between Floating Objects and Wall for Dielectric Fluid


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Theoretical Background
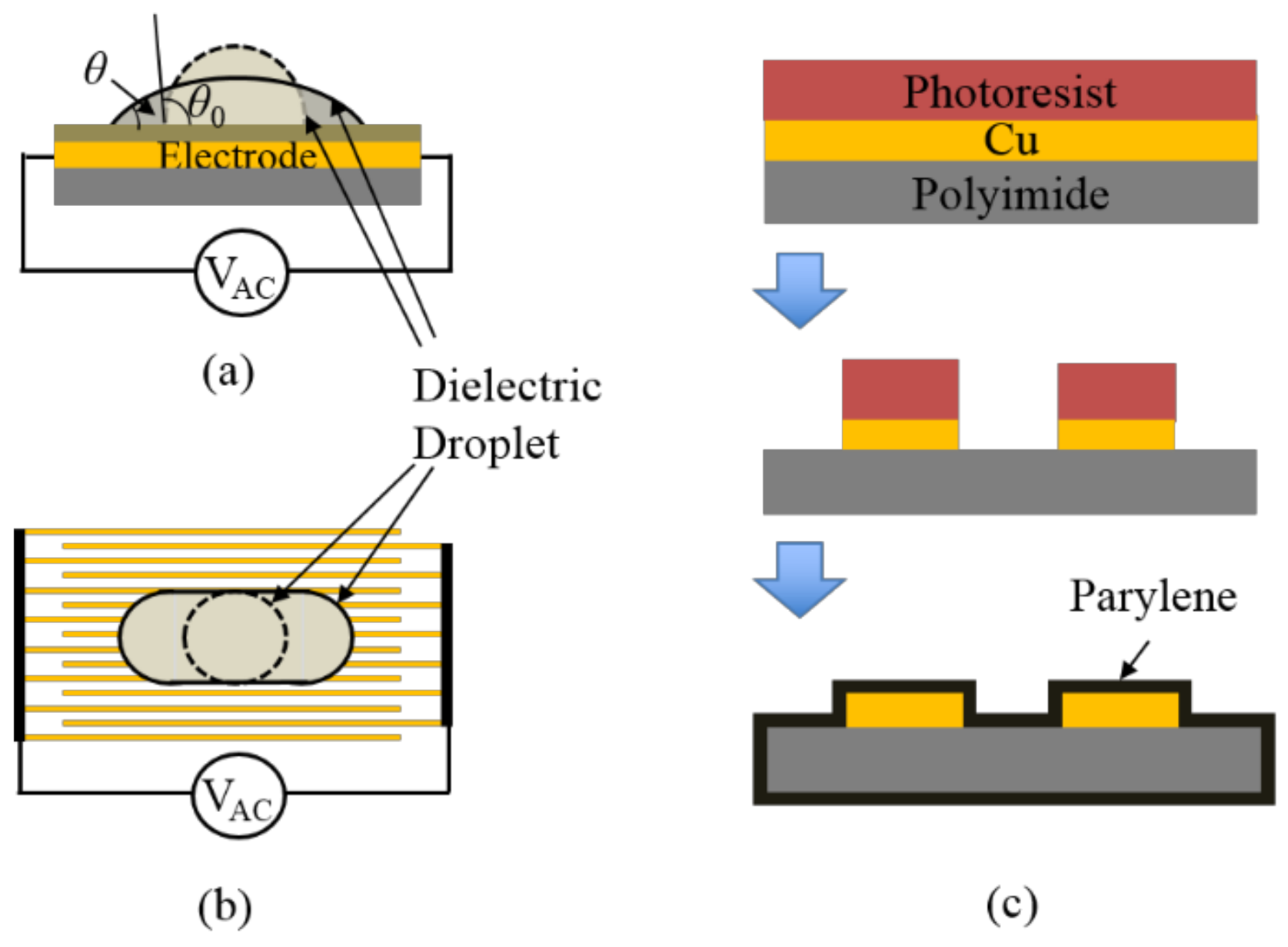
2.1. Dielectrowetting
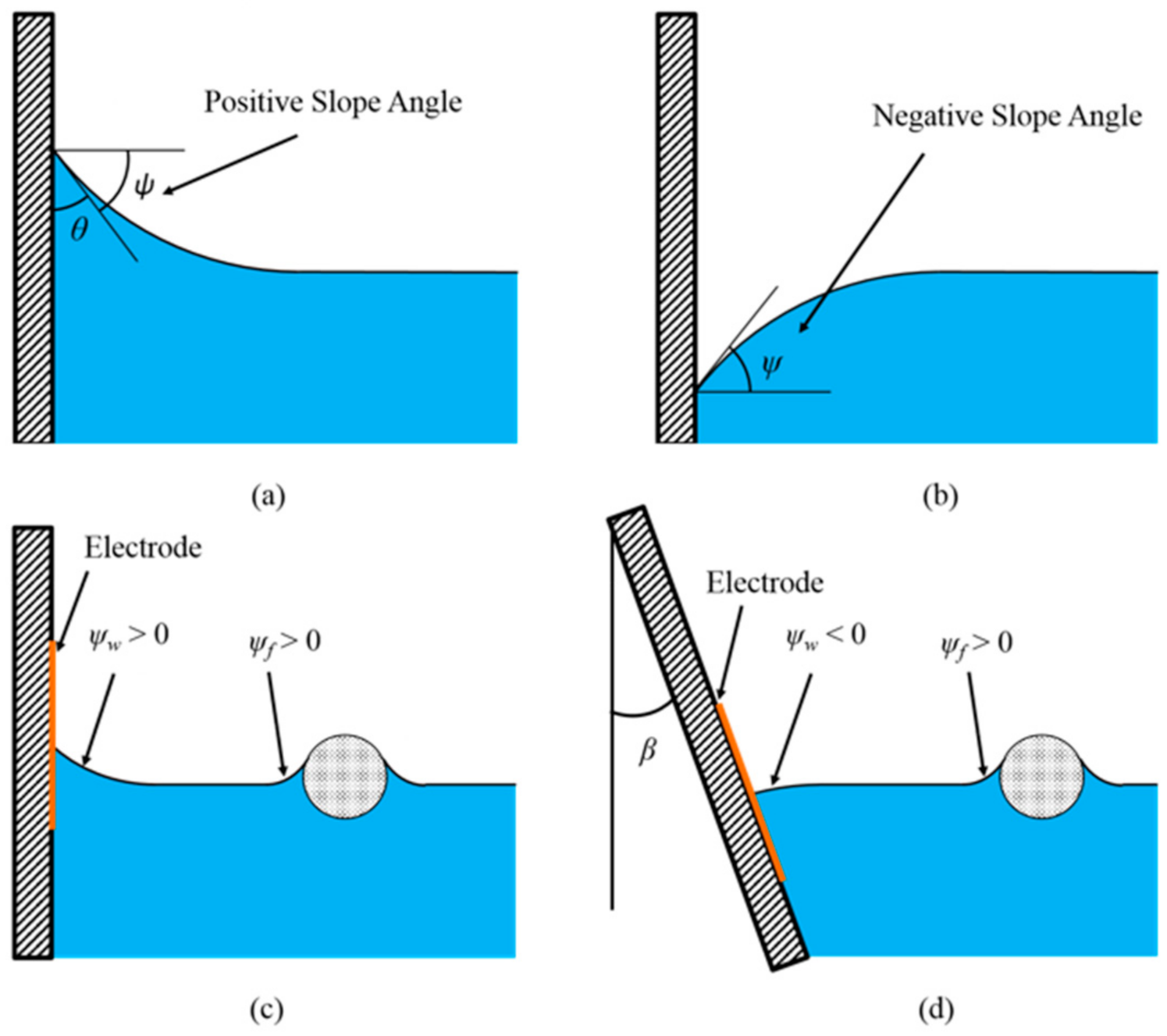
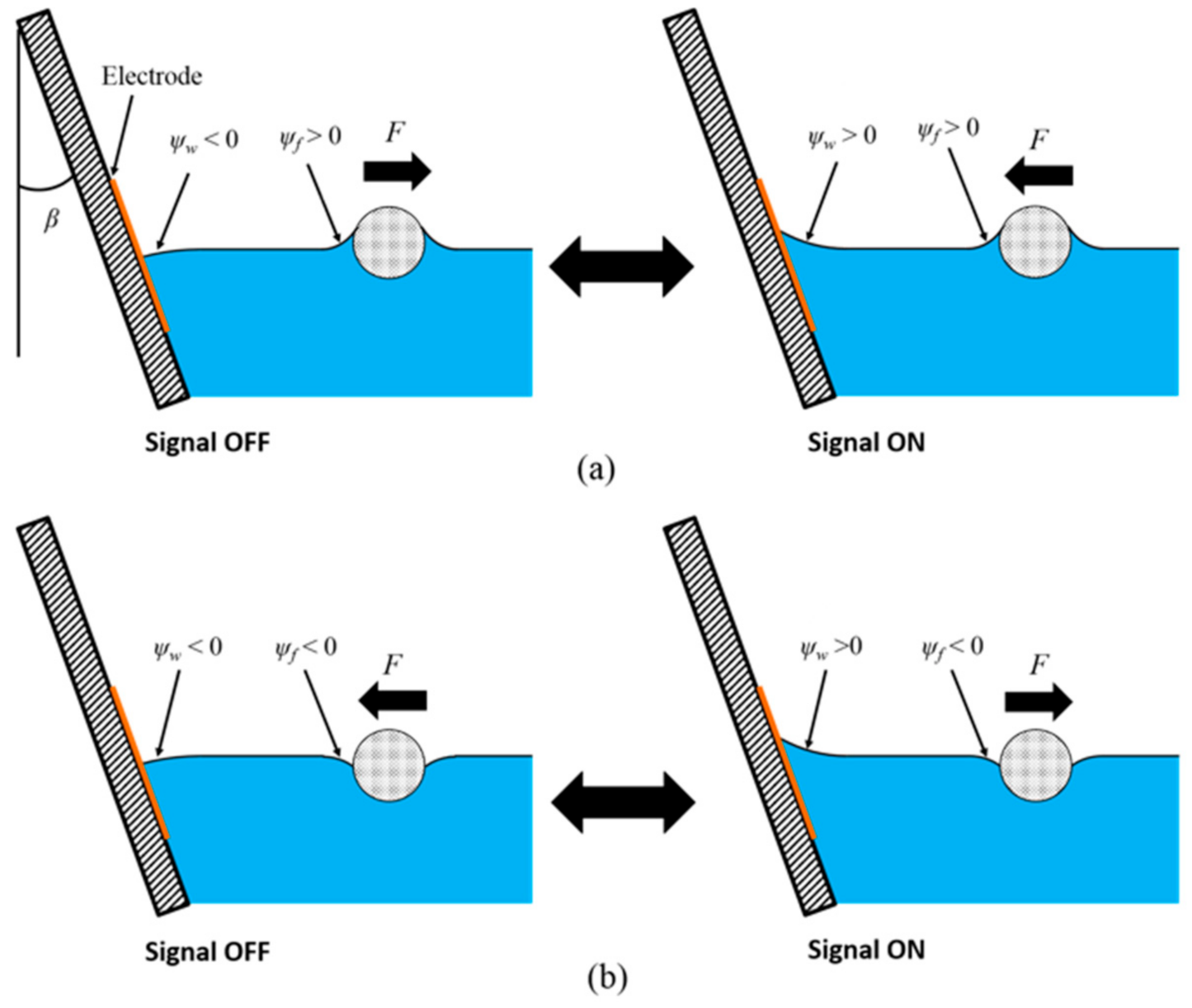
2.2. Cheerios Effect
3. Experimental Result
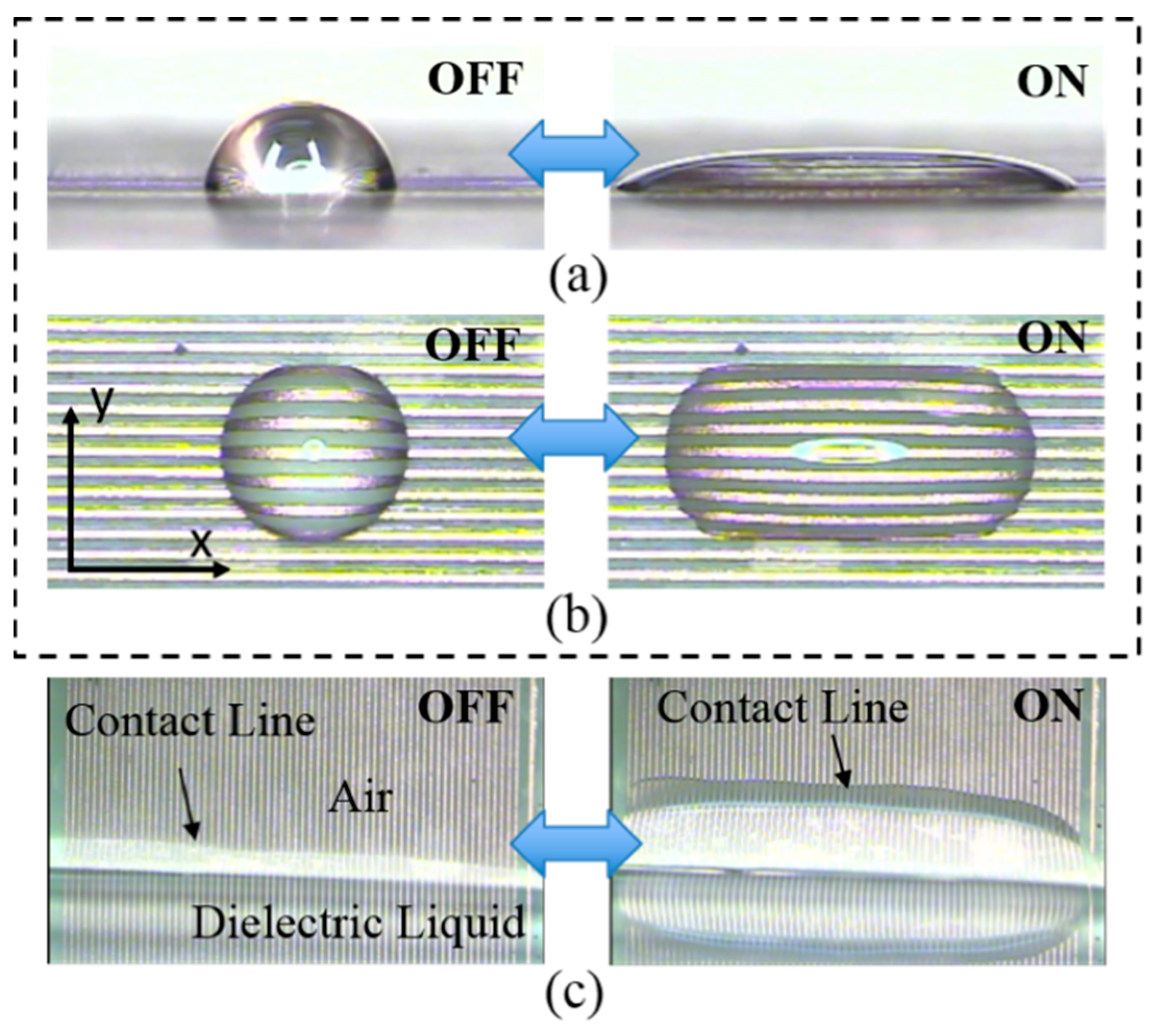
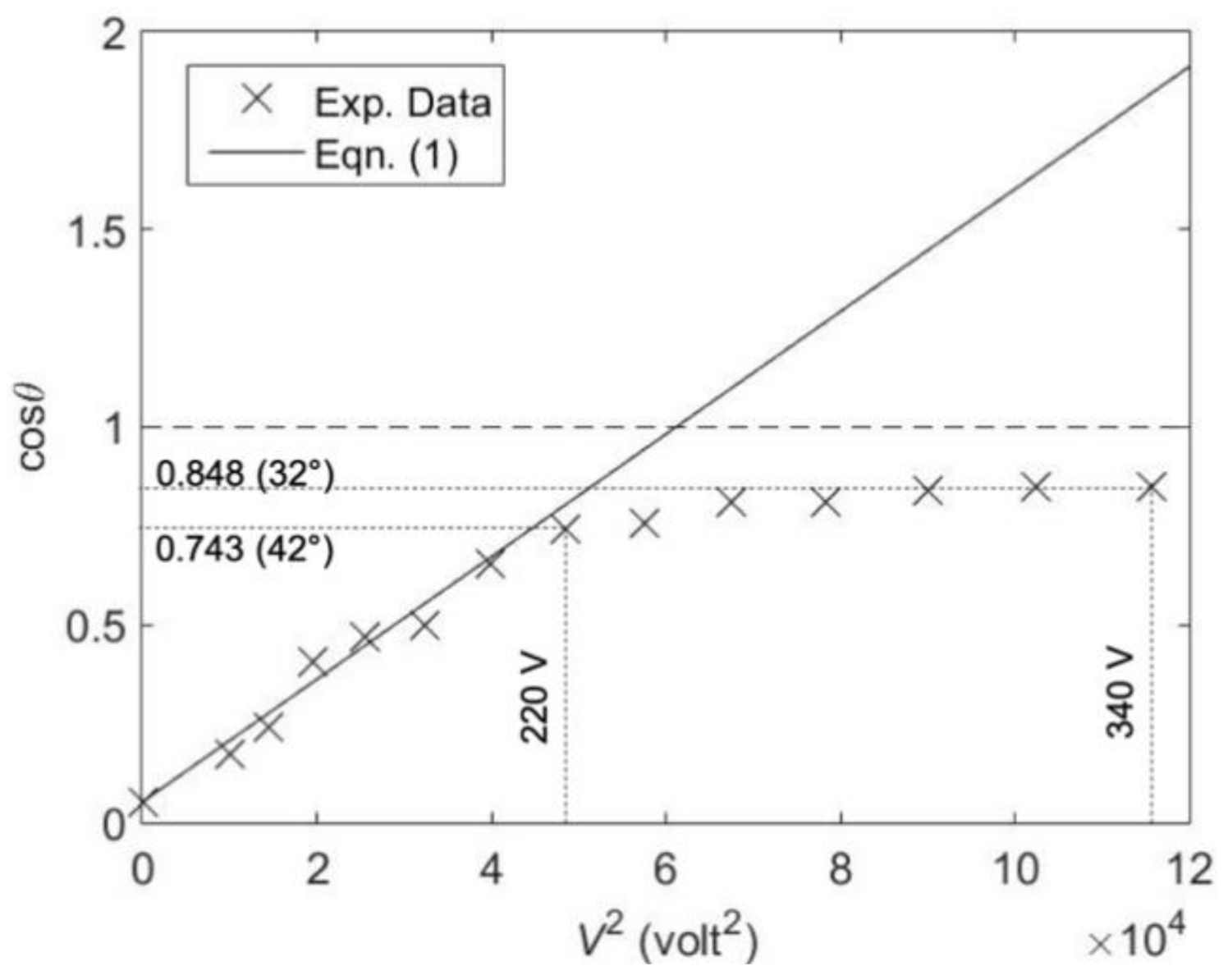
3.1. Dielectrowetting
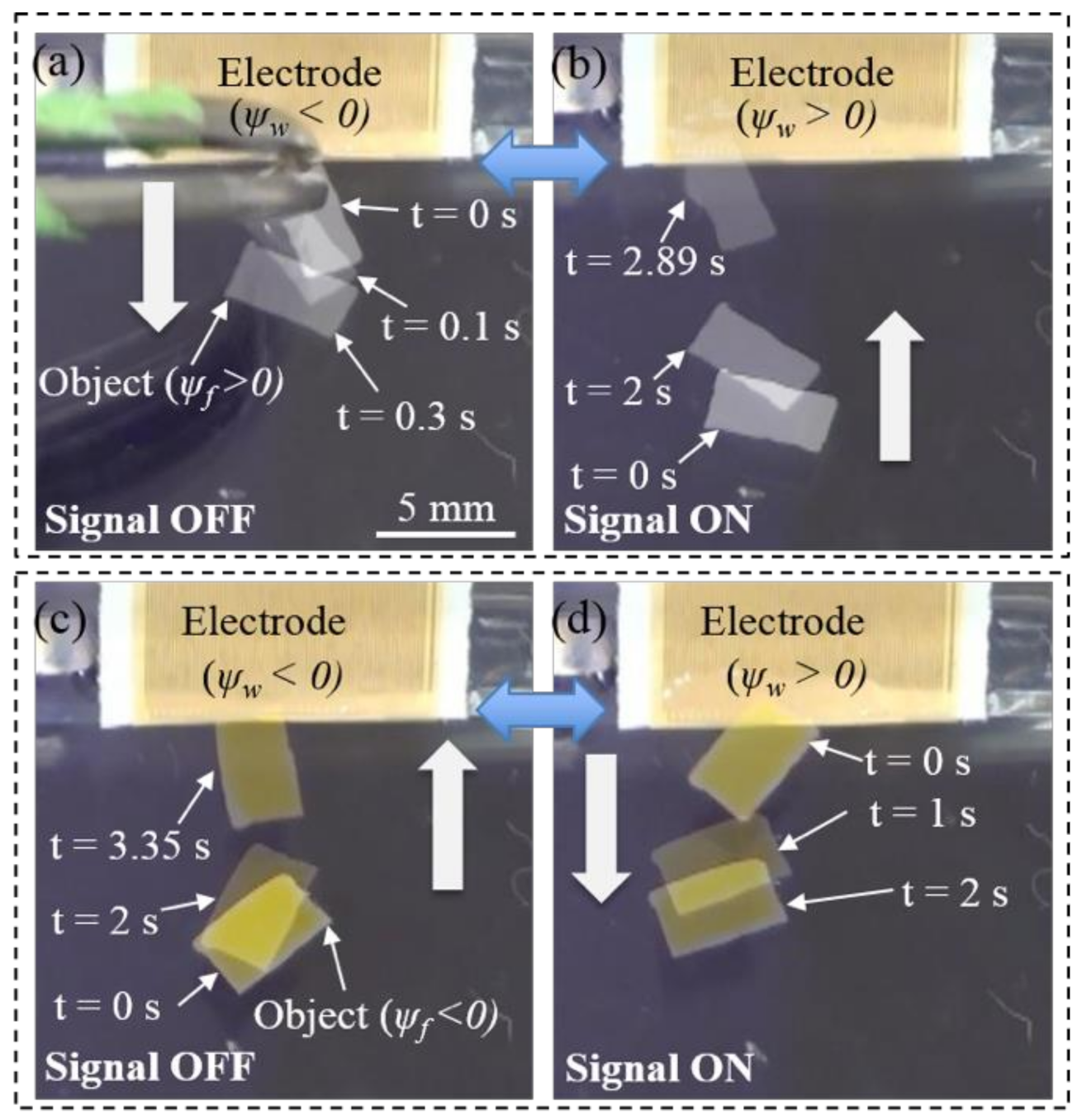
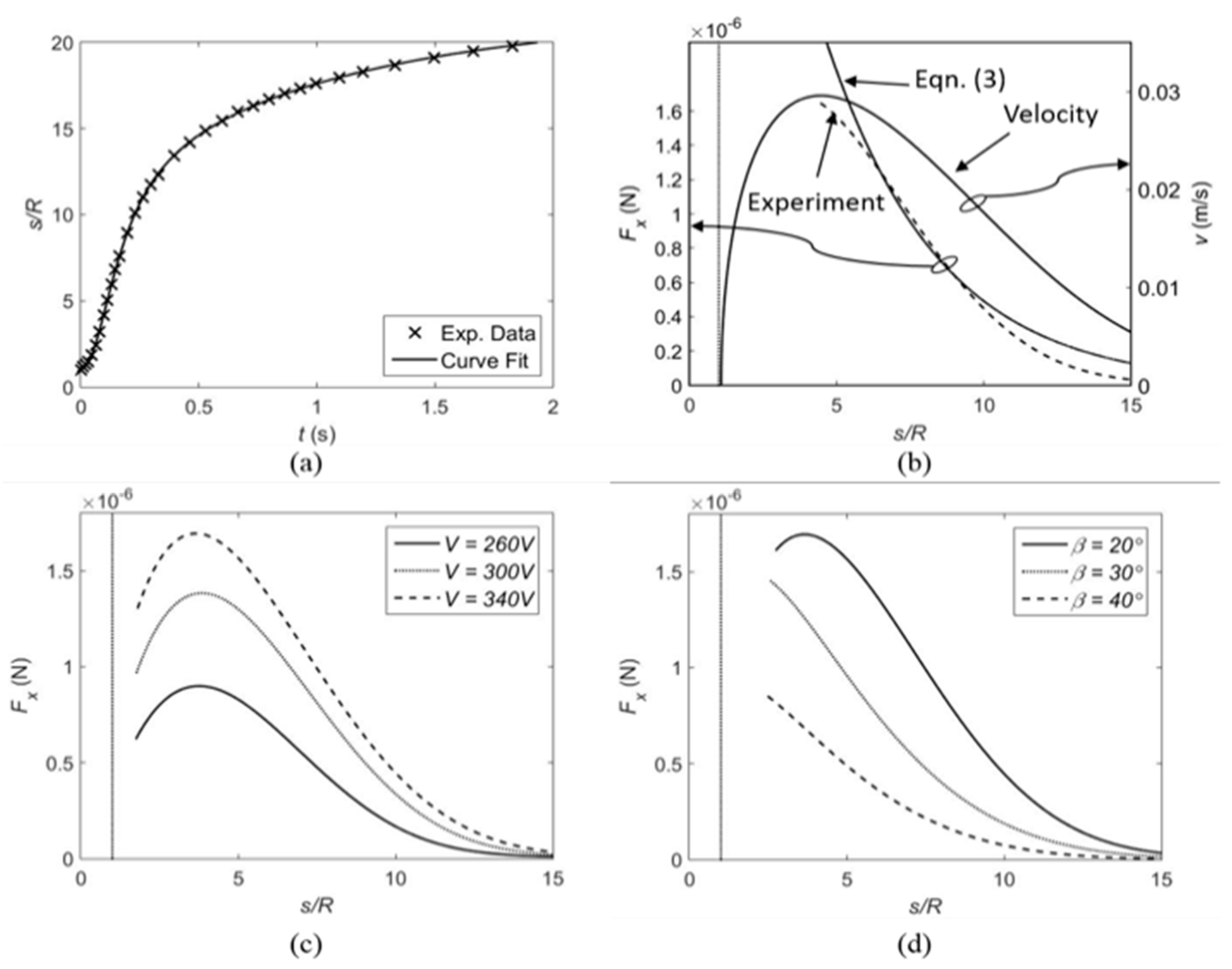
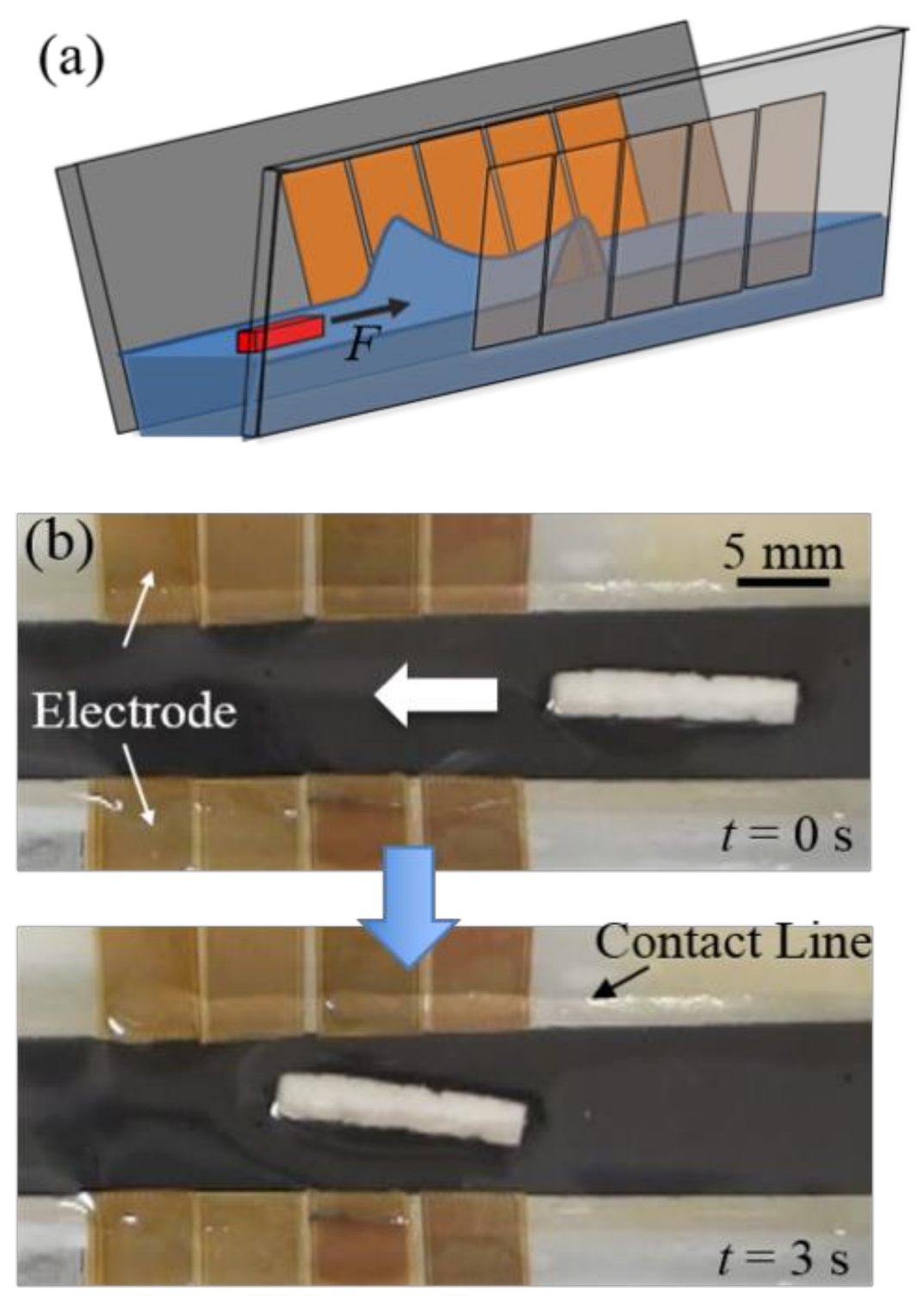
3.2. Control of Cheerios Effect by Dielectrowetting
4. Concluding Remarks and Future Works
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Vella, D.; Mahadevan, L. The “Cheerios effect”. Am. J. Phys. 2005, 73, 817–825. [Google Scholar] [CrossRef] [Green Version]
- Walker, J. The Flying Circus of Physics, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Yuan, J.; Cho, S.K. Bio-inspired micro/mini propulsion at air-water interface: A review. J. Mech. Sci. Technol. 2012, 26, 3761–3768. [Google Scholar] [CrossRef]
- Hu, D.L.; Bush, J.W.M. Meniscus-climbing insects. Nat. Cell Biol. 2005, 437, 733–736. [Google Scholar] [CrossRef] [PubMed]
- Baudoin, R.-P.-A. La physico-chimie des surfaces dans la vie des arthropodes aeriens des miroirs d’eau, des rivages marins et lacustres et de la zone intercotidale. Bull. Biol. Fr. Belg. 1955, 89, 16–164. [Google Scholar]
- Paunov, V.; Kralchevsky, P.; Denkov, N.; Nagayama, K. Lateral Capillary Forces between Floating Submillimeter Particles. J. Colloid Interface Sci. 1993, 157, 100–112. [Google Scholar] [CrossRef]
- Kralchevsky, P.A.; Paunov, V.N.; Denkov, N.D.; Nagayama, K. Capillary Image Forces. J. Colloid Interface Sci. 1994, 167, 47–65. [Google Scholar] [CrossRef]
- Dushkin, C.D.; Kralchevsky, P.; Yoshimura, H.; Nagayama, K. Lateral Capillary Forces Measured by Torsion Microbalance. Phys. Rev. Lett. 1995, 75, 3454–3457. [Google Scholar] [CrossRef] [Green Version]
- Hunt, G.E.; Batchelor, G.K. An Introduction to Fluid Dynamics. Math. Gaz. 1968, 52, 206. [Google Scholar] [CrossRef] [Green Version]
- Campbell, D.J.; Freidinger, E.R.; Hastings, J.M.; Querns, M.K. Spontaneous Assembly of Soda Straws. J. Chem. Educ. 2002, 79, 201. [Google Scholar] [CrossRef]
- Berg, J.C. An Introduction to Interfaces & Colloids: The Bridge to Nanoscience; World Scientific: Singapore, 2010. [Google Scholar]
- Kralchevsky, P.A.; Nagayama, K. Particles at Fluids Interfaces and Membranes: Attachment of Colloid Particles and Proteins to Interfaces and Formation of Two-Dimensional Arrays; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Yuan, J.; Feng, J.; Cho, S.K. Cheerios Effect Controlled by Electrowetting. Langmuir 2015, 31, 8502–8511. [Google Scholar] [CrossRef]
- Yuan, J.; Cho, S.K. Cheerios effect and its control by contact angle modulation. In Advances in Contact Angle, Wettability and Adhesion, 1st ed.; Wiley: Hoboken, NJ, USA; Scrivener: Salem, MA, USA, 2015; Volume 2. [Google Scholar]
- Yuan, J.; Cho, S.K. Active control of Cheerios effect for dielectric fluid. In Proceedings of the 28th IEEE International Conference on Microelectromechanical Systems, Estoril, Portugal, 18–22 January 2015; pp. 496–499. [Google Scholar]
- Biswas, S.; Drzal, L.T. A Novel Approach to Create a Highly Ordered Monolayer Film of Graphene Nanosheets at the Liquid−Liquid Interface. Nano Lett. 2009, 9, 167–172. [Google Scholar] [CrossRef]
- Bowden, N.; Terfort, A.; Carbeck, J.; Whitesides, G.M. Self-Assembly of Mesoscale Objects into Ordered Two-Dimensional Arrays. Science 1997, 276, 233–235. [Google Scholar] [CrossRef]
- Bowden, N.; Arias, F.; Deng, A.T.; Whitesides, G.M. Self-Assembly of Microscale Objects at a Liquid/Liquid Interface through Lateral Capillary Forces. Langmuir 2001, 17, 1757–1765. [Google Scholar] [CrossRef]
- Hu, D.L.; Prakash, M.; Chan, B.; Bush, J.W.M. Water-walking devices. Exp. Fluids 2007, 43, 769–778. [Google Scholar] [CrossRef]
- Yu, Y.; Guo, M.; Li, X.; Zheng, Q.-S. Meniscus-Climbing Behavior and Its Minimum Free-Energy Mechanism. Langmuir 2007, 23, 10546–10550. [Google Scholar] [CrossRef] [PubMed]
- Yuan, J.; Cho, S.K. Free surface propulsion by electrowetting-assisted Cheerios effect. In Proceedings of the 27th IEEE International Conference on Microelectromechanical Systems, San Francisco, CA, USA, 26–30 January 2014; pp. 991–994. [Google Scholar]
- Carballo, J.M.; Ni, Q.; Vasquez, J.; Crane, N.B. Controlled manipulation of floating objects on deformed fluid interfaces and conditions for stable equilibria. Colloids Surf. A Physicochem. Eng. Asp. 2017, 512, 118–128. [Google Scholar] [CrossRef] [Green Version]
- Cho, S.K.; Moon, H.; Kim, C.-J. Creating, transporting, cutting, and merging liquid droplets by electrowetting-based actuation for digital microfluidic circuits. J. Microelectromech. Syst. 2003, 12, 70–80. [Google Scholar] [CrossRef] [Green Version]
- Mugele, F.; Baret, J.-C. Electrowetting: From basics to applications. J. Phys. Condens. Matter 2005, 17, R705–R774. [Google Scholar] [CrossRef]
- Fair, R.B. Digital microfluidics: Is a true lab-on-a-chip possible? Microfluid. Nanofluid. 2007, 3, 245–281. [Google Scholar] [CrossRef]
- Fair, R.B.; Khlystov, A.; Tailor, T.D.; Ivanov, V.; Evans, R.D.; Srinivasan, V.; Pamula, V.K.; Pollack, M.G.; Griffin, P.B.; Zhou, J. Chemical and Biological Applications of Digital-Microfluidic Devices. IEEE Des. Test Comput. 2007, 24, 10–24. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Kim, C.-J. “Cj” Current commercialization status of electrowetting-on-dielectric (EWOD) digital microfluidics. Lab Chip 2020, 20, 1705–1712. [Google Scholar] [CrossRef]
- Hayes, R.A.; Feenstra, B.J. Video-speed electronic paper based on electrowetting. Nat. Cell Biol. 2003, 425, 383–385. [Google Scholar] [CrossRef] [PubMed]
- Berge, B.; Peseux, J. Variable focal lens controlled by an external voltage: An application of electrowetting. Eur. Phys. J. E 2000, 3, 159–163. [Google Scholar] [CrossRef]
- Kuiper, S.S.; Hendriks, B.H.W. Variable-focus liquid lens for miniature cameras. Appl. Phys. Lett. 2004, 85, 1128–1130. [Google Scholar] [CrossRef] [Green Version]
- Yuan, J.; Cho, S.K. Mechanism and flow measurement of AC electrowetting propulsion on free surface. Exp. Fluids 2015, 56, 1. [Google Scholar] [CrossRef]
- Chung, S.K.; Zhao, Y.; Cho, S.K. On-chip creation and elimination of microbubbles for a micro-object manipulator. J. Micromech. Microeng. 2008, 18, 095009. [Google Scholar] [CrossRef]
- Zhao, Y.; Chung, S.K.; Yi, U.-C.; Cho, S.K. Droplet manipulation and microparticle sampling on perforated microfilter membranes. J. Micromech. Microeng. 2008, 18, 025030. [Google Scholar] [CrossRef]
- Heikenfeld, J.; Steckl, A. High-transmission electrowetting light valves. Appl. Phys. Lett. 2005, 86, 151121. [Google Scholar] [CrossRef] [Green Version]
- Heikenfeld, J.; Zhou, K.; Kreit, E.; Raj, B.; Yang, S.; Sun, B.; Milarcik, A.; Clapp, L.; Schwartz, R. Electrofluidic displays using Young–Laplace transposition of brilliant pigment dispersions. Nat. Photonics 2009, 3, 292–296. [Google Scholar] [CrossRef]
- Pellat, M.H. Mesure de la Force Agissant sur les Diélectriques Liquides non Électrisés Placés Dans un Champ Élitrique. CR Acad. Sci. Paris 1895, 119, 691–694. [Google Scholar]
- Jones, T. Liquid dielectrophoresis on the microscale. J. Electrost. 2001, 51–52, 290–299. [Google Scholar] [CrossRef] [Green Version]
- Fan, S.-K.; Hsieh, T.-H.; Lin, D.-Y. General digital microfluidic platform manipulating dielectric and conductive droplets by dielectrophoresis and electrowetting. Lab Chip 2009, 9, 1236–1242. [Google Scholar] [CrossRef] [PubMed]
- Kaler, K.V.I.S.; Prakash, R.; Chugh, D. Liquid dielectrophoresis and surface microfluidics. Biomicrofluidics 2010, 4, 022805. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pohl, H.A.; Hawk, I. Separation of Living and Dead Cells by Dielectrophoresis. Science 1966, 152, 647–649. [Google Scholar] [CrossRef] [PubMed]
- Chiou, P.Y.; Ohta, A.T.; Wu, M.C. Massively parallel manipulation of single cells and microparticles using optical images. Nat. Cell Biol. 2005, 436, 370–372. [Google Scholar] [CrossRef]
- McHale, G.; Brown, C.V.; Newton, M.I.; Wells, G.G.; Sampara, N. Dielectrowetting Driven Spreading of Droplets. Phys. Rev. Lett. 2011, 107, 186101. [Google Scholar] [CrossRef] [Green Version]
- McHale, G.; Brown, C.V.; Sampara, N. Voltage-induced spreading and superspreading of liquids. Nat. Commun. 2013, 4, 1605. [Google Scholar] [CrossRef]
- Russell, A.; Kreit, E.; Heikenfeld, J. Scaling Dielectrowetting Optical Shutters to Higher Resolution: Microfluidic and Optical Implications. Langmuir 2014, 30, 5357–5362. [Google Scholar] [CrossRef]
- Zhao, R.; Cumby, B.; Russell, A.; Heikenfeld, J. Large area and low power dielectrowetting optical shutter with local deterministic fluid film breakup. Appl. Phys. Lett. 2013, 103, 223510. [Google Scholar] [CrossRef] [Green Version]
- Geng, H.; Feng, J.; Stabryla, L.M.; Cho, S.K. Dielectrowetting manipulation for digital microfluidics: Creating, transporting, splitting, and merging of droplets. Lab Chip 2017, 17, 1060–1068. [Google Scholar] [CrossRef]
- Geng, H.; Cho, S.K. Dielectrowetting for Digital Microfluidics: Principle and Application. A Critical Review. Rev. Adhes. Adhes. 2017, 5, 268–302. [Google Scholar] [CrossRef]
- Edwards, A.; Brown, C.; Newton, M.; McHale, G. Dielectrowetting: The past, present and future. Curr. Opin. Colloid Interface Sci. 2018, 36, 28–36. [Google Scholar] [CrossRef]
- Dushkin, C.D.; Kralchevsky, P.A.; Paunov, V.N.; Yoshimura, A.H.; Nagayama, K. Torsion Balance for Measurement of Capillary Immersion Forces. Langmuir 1996, 12, 641–651. [Google Scholar] [CrossRef]
- Velev, O.D.; Denkov, N.D.; Paunov, V.N.; Kralchevsky, P.A.; Nagayama, K. Capillary Image Forces: II. Experiment. J. Colloid Interface Sci. 1994, 167, 66–73. [Google Scholar] [CrossRef]
- Petkov, J.T.; Denkov, N.D.; Danov, K.D.; Velev, O.D.; Aust, R.; Durst, F. Measurement of the Drag Coefficient of Spherical Particles Attached to Fluid Interfaces. J. Colloid Interface Sci. 1995, 172, 147–154. [Google Scholar] [CrossRef]
- Vassileva, N.D.; Ende, D.V.D.; Mugele, F.; Mellema, J. Capillary Forces between Spherical Particles Floating at a Liquid−Liquid Interface. Langmuir 2005, 21, 11190–11200. [Google Scholar] [CrossRef] [PubMed]
- Morrison, F. Introduction to Fluid Mechanics; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Wei, W.; Cai, J.; Xiao, J.; Meng, Q.; Xiao, B.; Han, Q. Kozeny-Carman Constant of Porous Media: Insights from Fractal-Capillary Imbibition Theory. Fuel 2018, 234, 1373–1379. [Google Scholar] [CrossRef]
- Xiao, B.; Huang, Q.; Chen, H.; Chen, X.; Long, G. A Fractal Model for Capillary Flow through a Single Tortuous Capillary with Roughened Surfaces in Fibrous Porous Media. Fractals 2021, 29, 2150017. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, J.; Feng, J.; Cho, S.K. Dielectrowetting Control of Capillary Force (Cheerios Effect) between Floating Objects and Wall for Dielectric Fluid. Micromachines 2021, 12, 341. https://doi.org/10.3390/mi12030341
Yuan J, Feng J, Cho SK. Dielectrowetting Control of Capillary Force (Cheerios Effect) between Floating Objects and Wall for Dielectric Fluid. Micromachines. 2021; 12(3):341. https://doi.org/10.3390/mi12030341
Chicago/Turabian StyleYuan, Junqi, Jian Feng, and Sung Kwon Cho. 2021. "Dielectrowetting Control of Capillary Force (Cheerios Effect) between Floating Objects and Wall for Dielectric Fluid" Micromachines 12, no. 3: 341. https://doi.org/10.3390/mi12030341