
Hysteresis Compensation for a Piezoelectric Actuator of Active Helicopter Rotor Using Compound Control


Abstract
:
1. Introduction
2. Piezoelectric Actuator and Its Hysteresis Behavior
3. Hysteresis Model and Parameter Identification
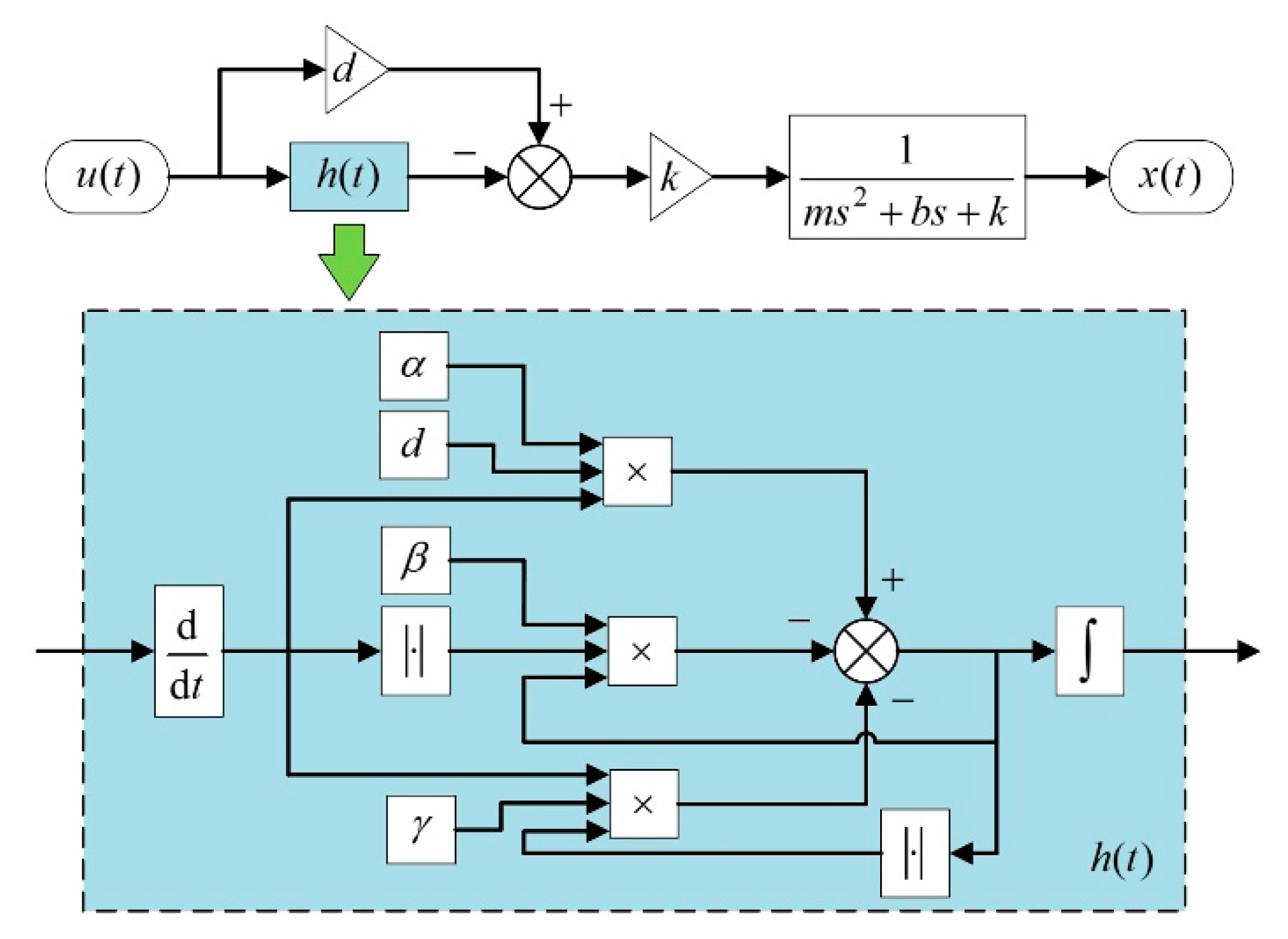
3.1. Hysteresis Model
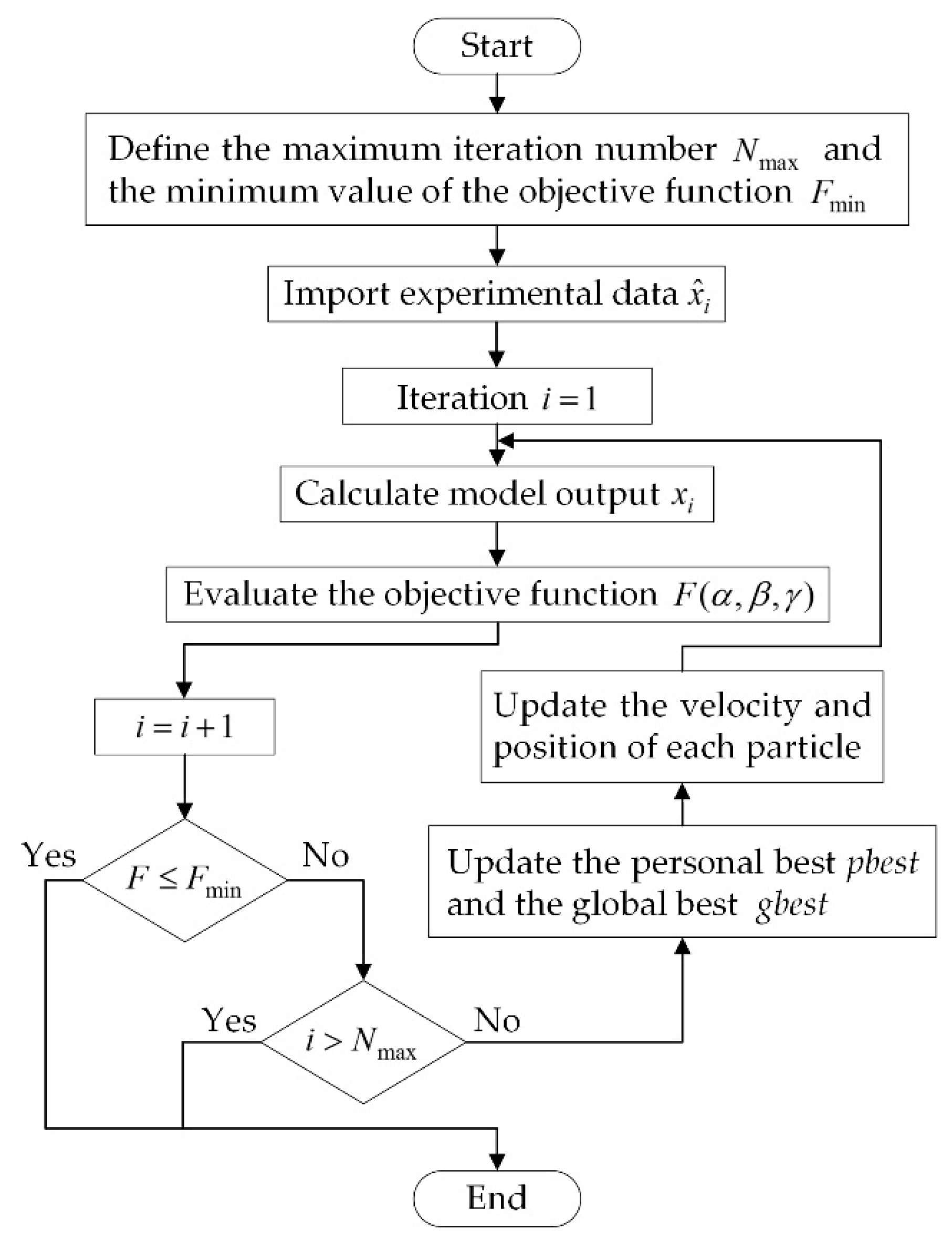
3.2. Parameter Identification
- Step 1: To identify parameters of the Bouc–Wen model in quasi-steady condition, with the actuation frequency set to 1 Hz;
- Step 2: To identify the damping coefficient in dynamic condition, with the actuation frequency set to 30 Hz.
4. Hysteresis Suppression
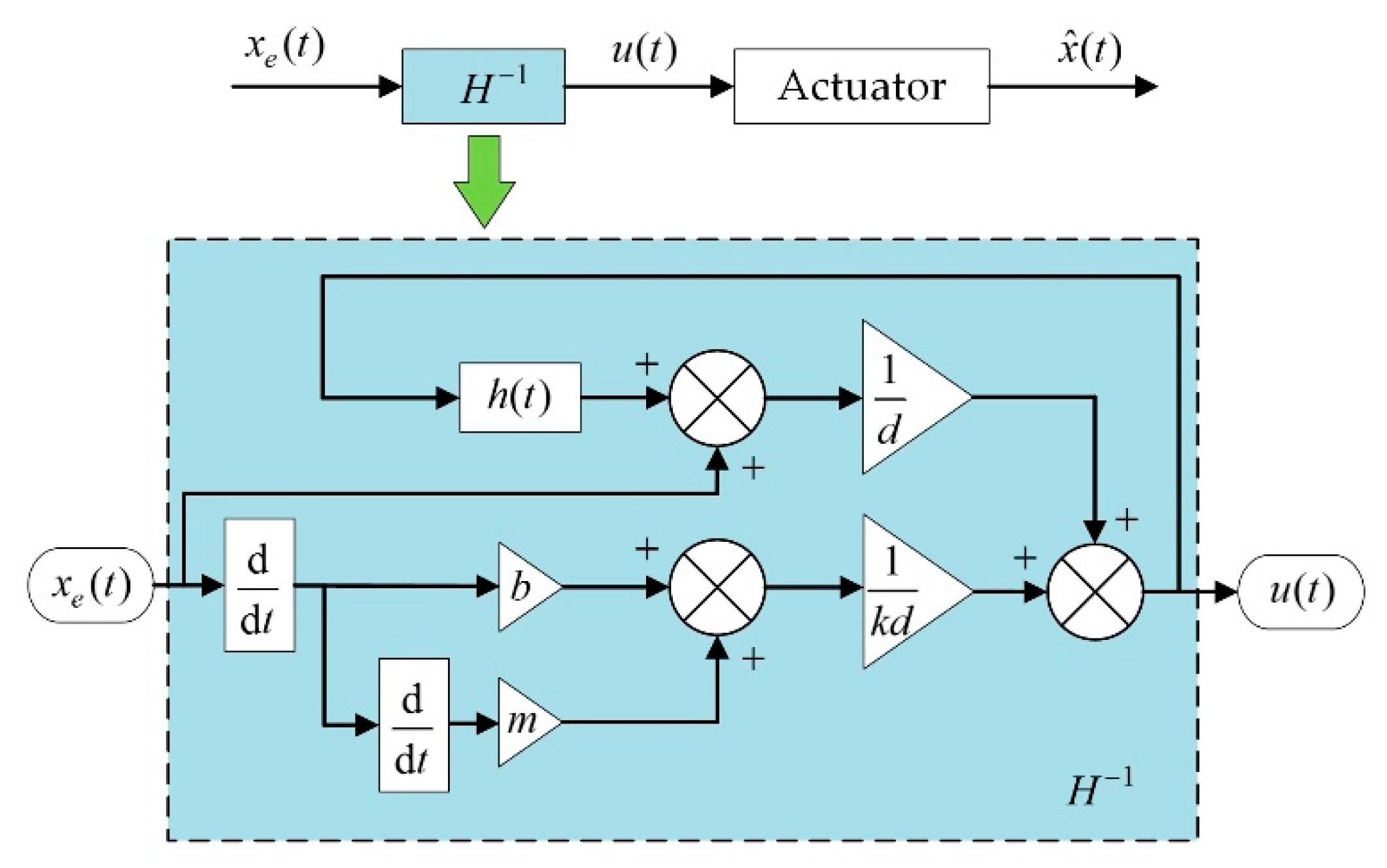
4.1. Feedforward Compensation
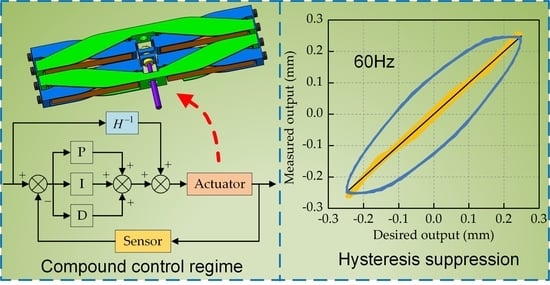
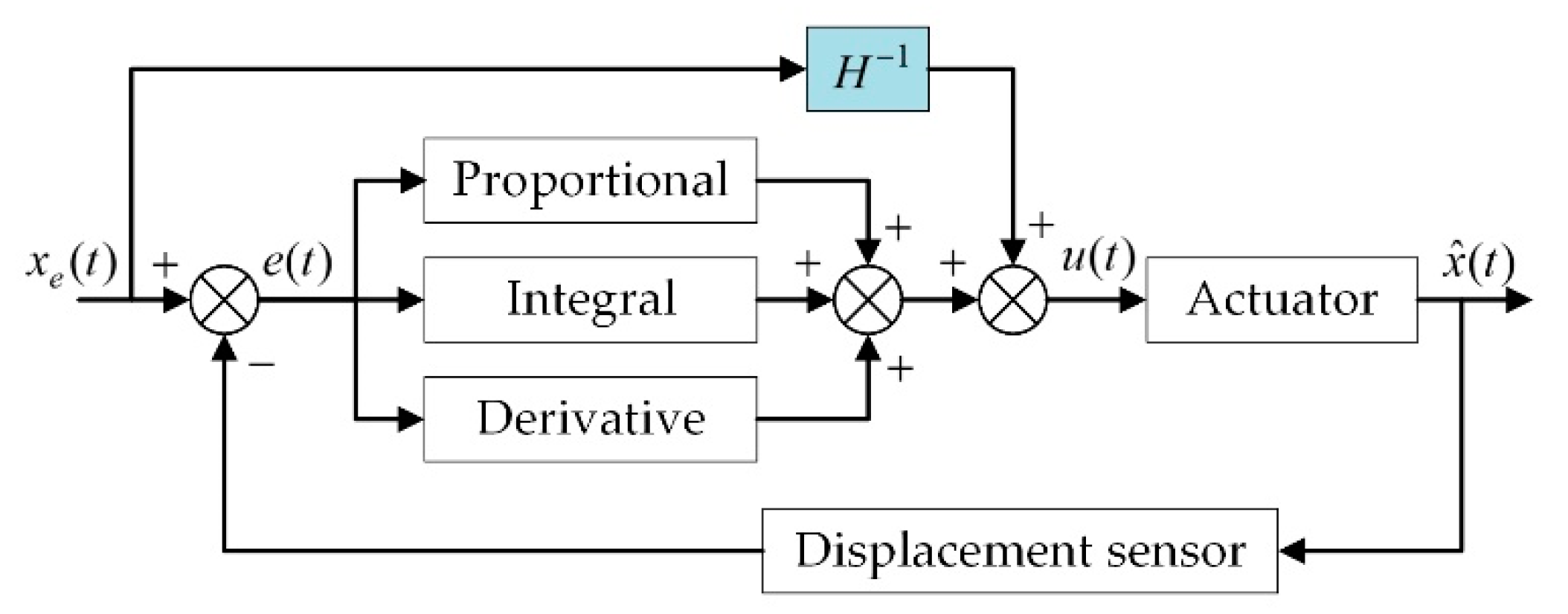
4.2. Compound Control Regime
5. Conclusions
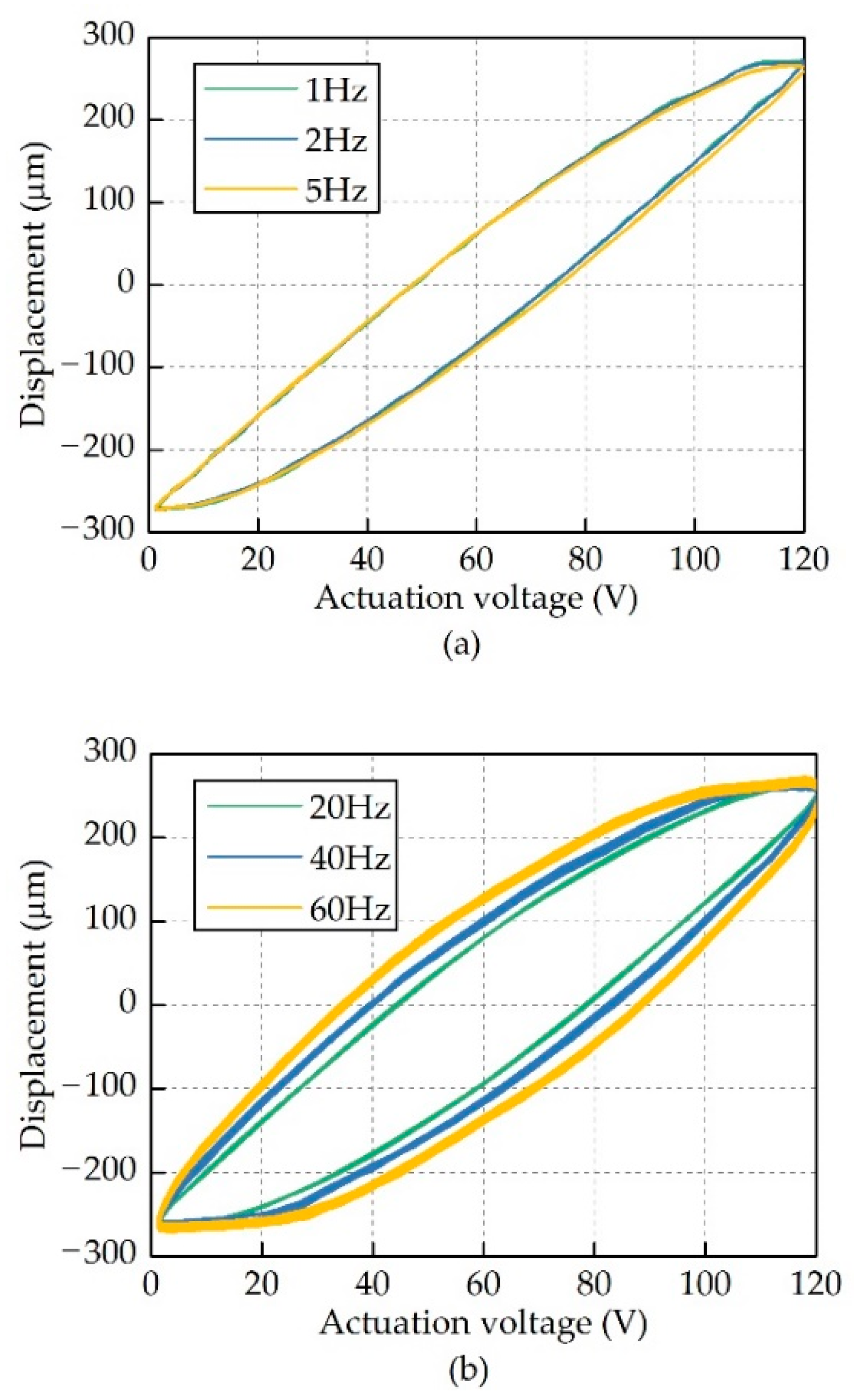
- Measurement results demonstrated that the hysteresis curves of the actuator at frequencies lower than 10 Hz were almost identical to each other. In this condition, the hysteresis behavior of this actuator is dominated by the hysteresis characteristics of the piezoelectric stacks. As the actuation frequency increases, the influence of the system properties of the actuator, including mass, damping and stiffness, on the actuator hysteresis will become more and more significant.
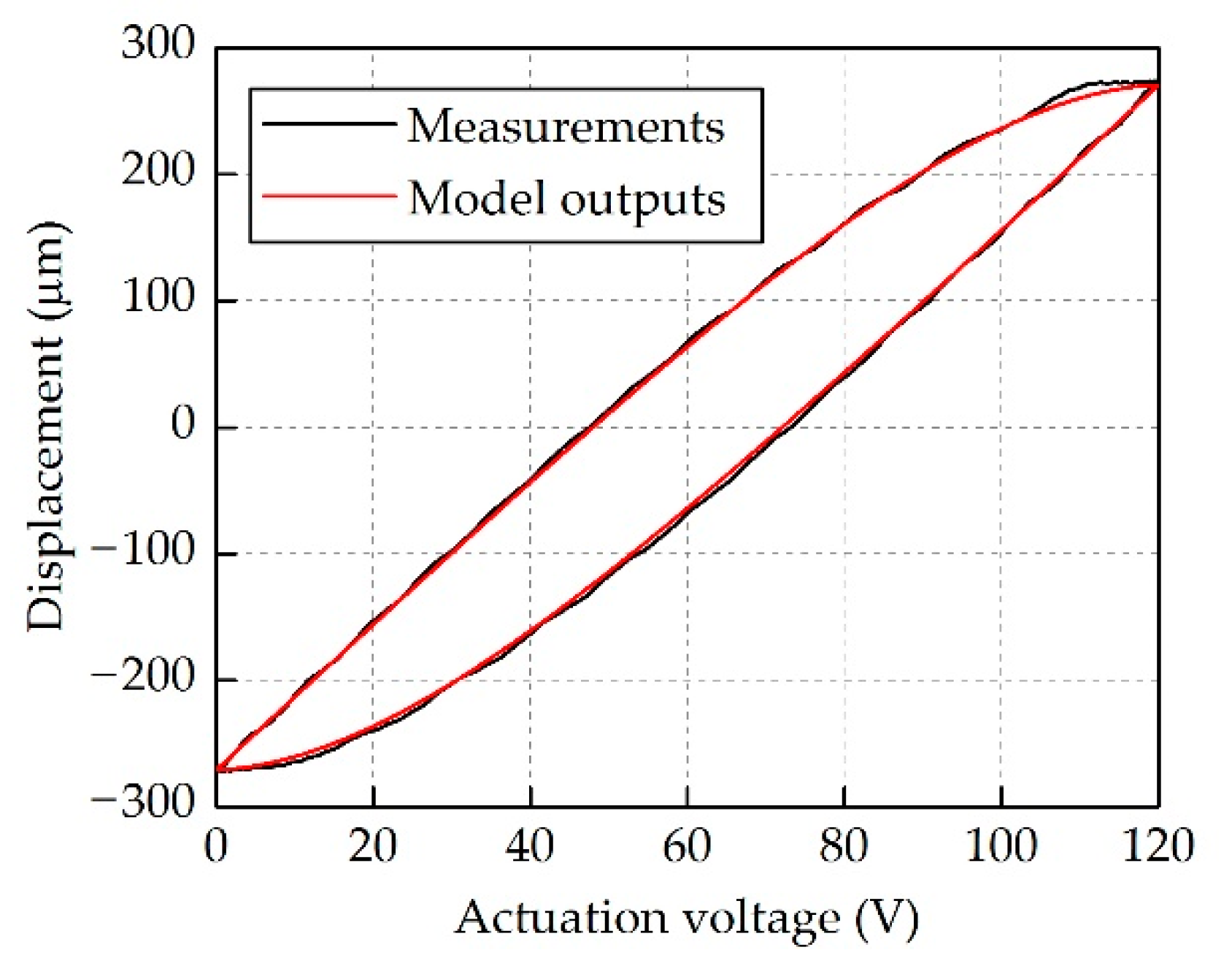
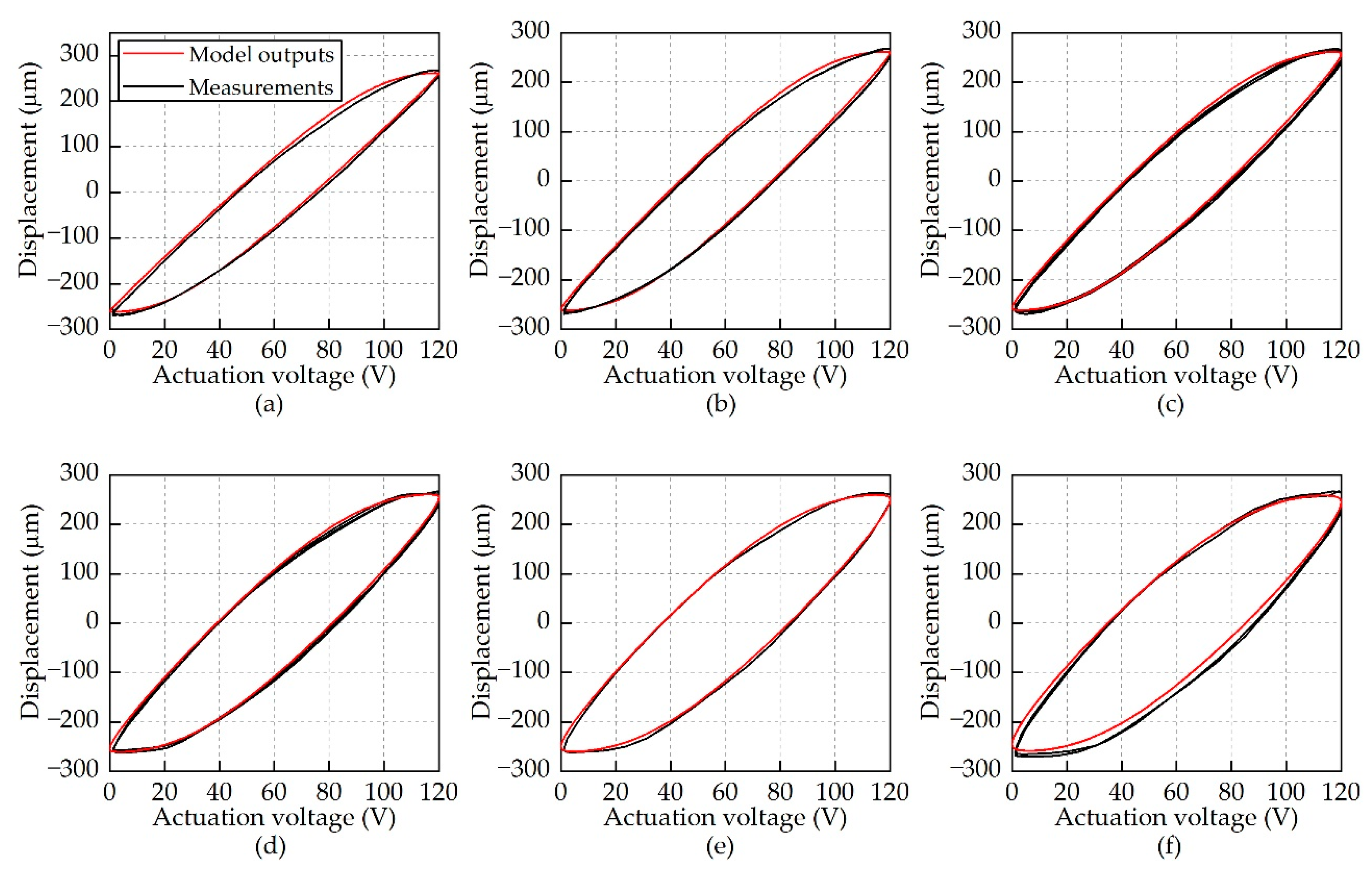
- The established hysteresis model, composed of the Bouc–Wen model and the transfer function of a second-order system, can precisely describe the rate-dependent hysteresis behavior of the double-acting actuator at a wide range of frequency from 1 Hz to 60 Hz. In this model, the Bouc–Wen model is used to formulate the hysteresis resulting from piezoelectric stacks, while the transfer function is used to describe responses of the actuator in dynamic conditions.
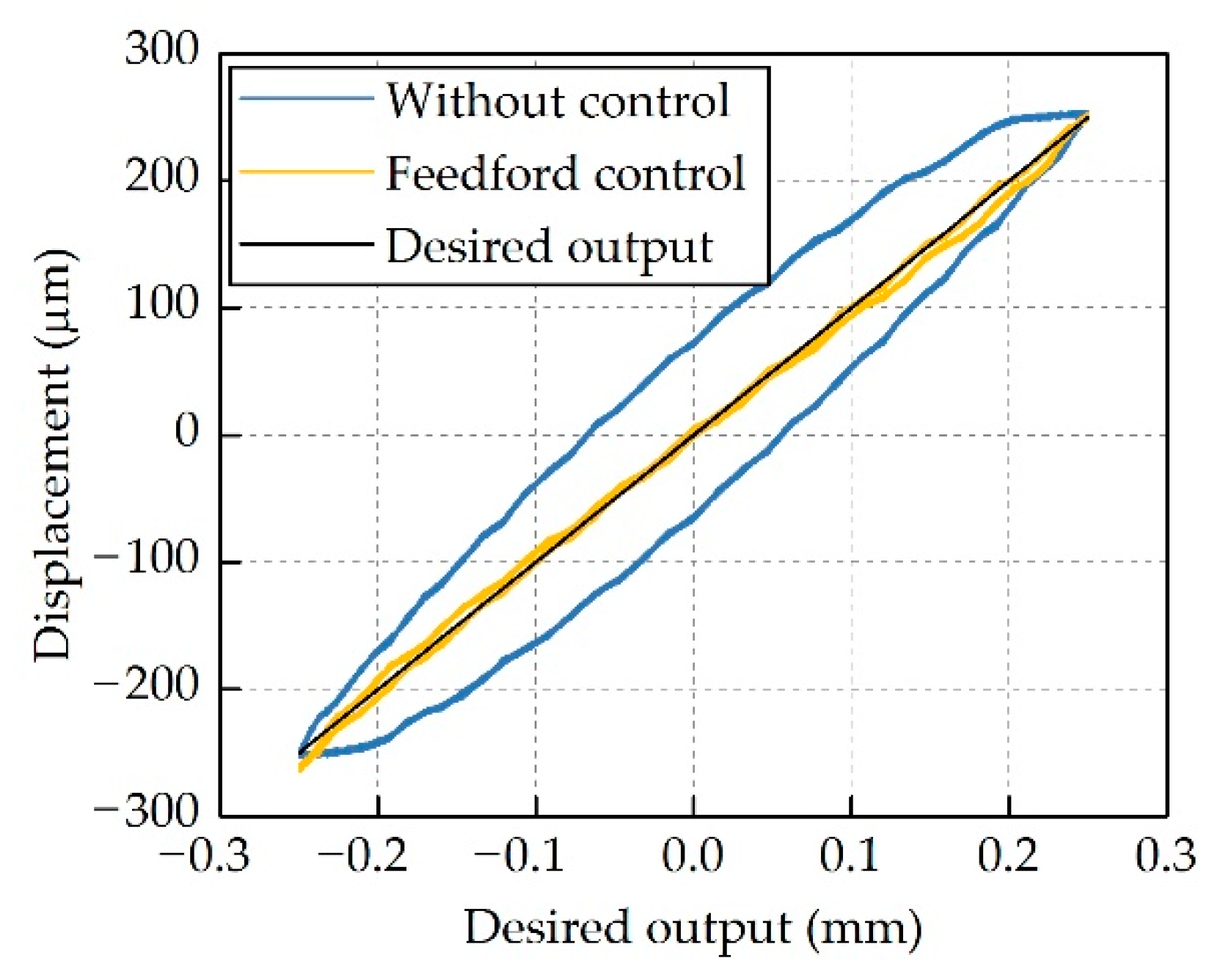
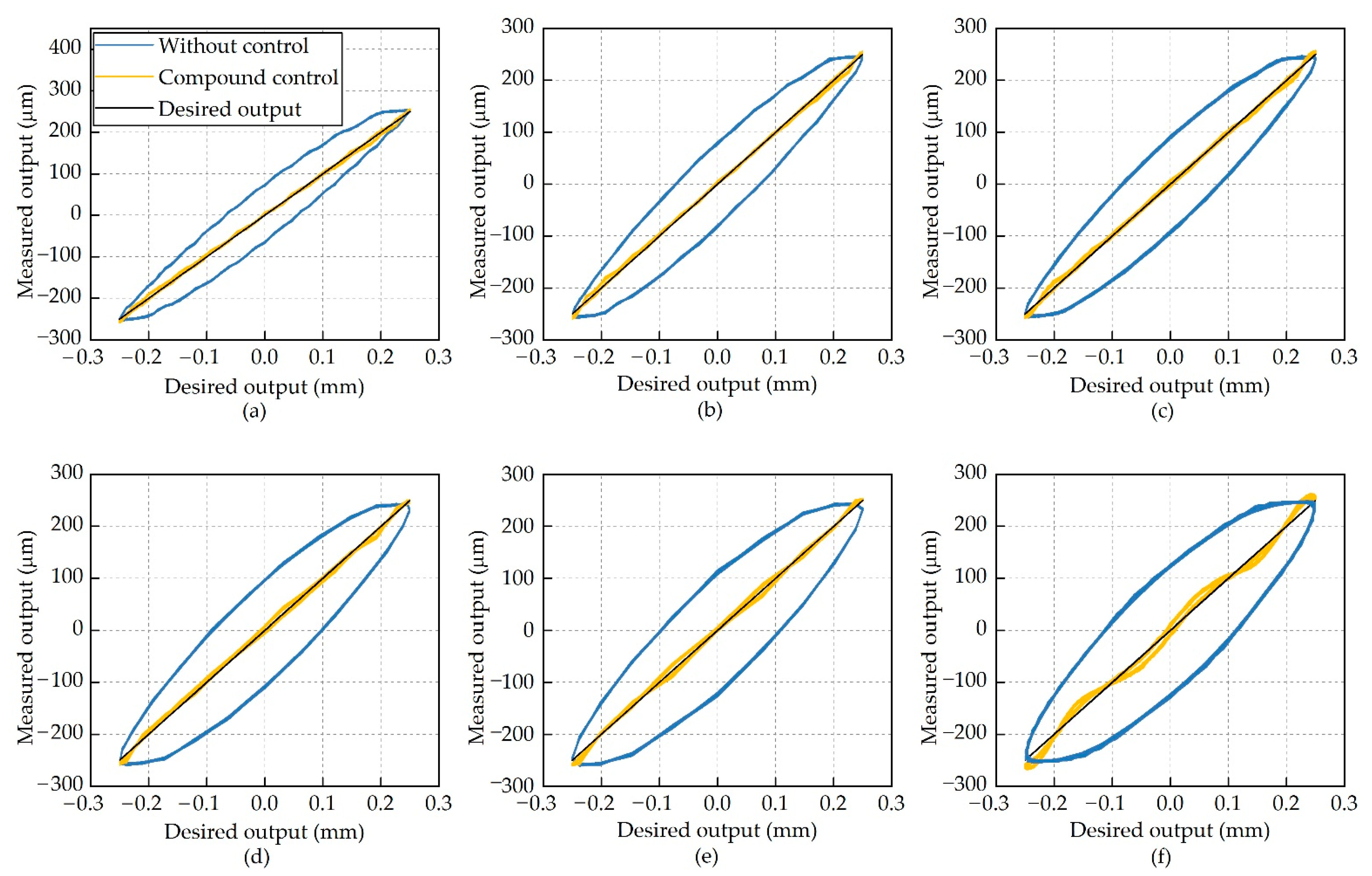
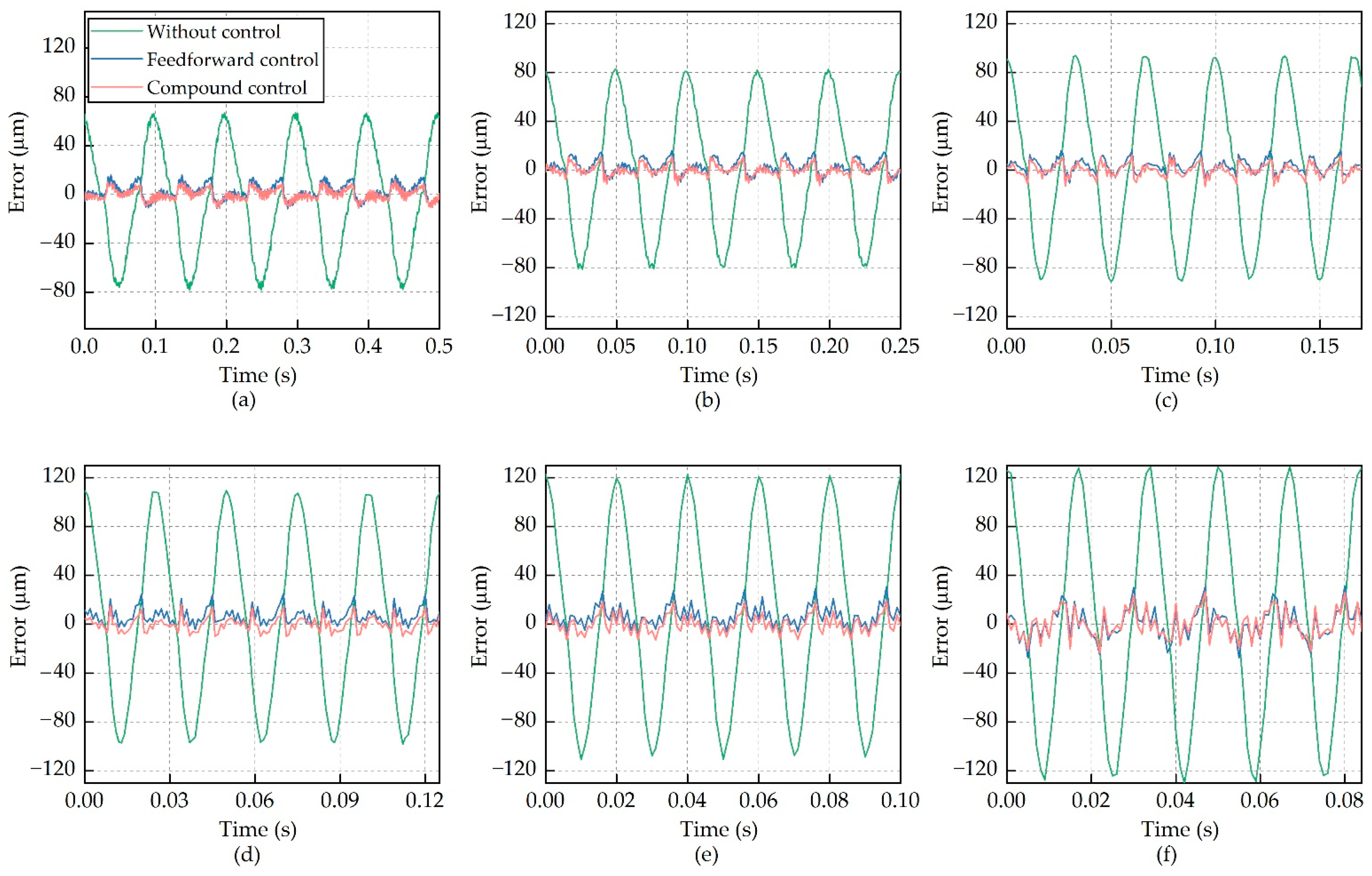
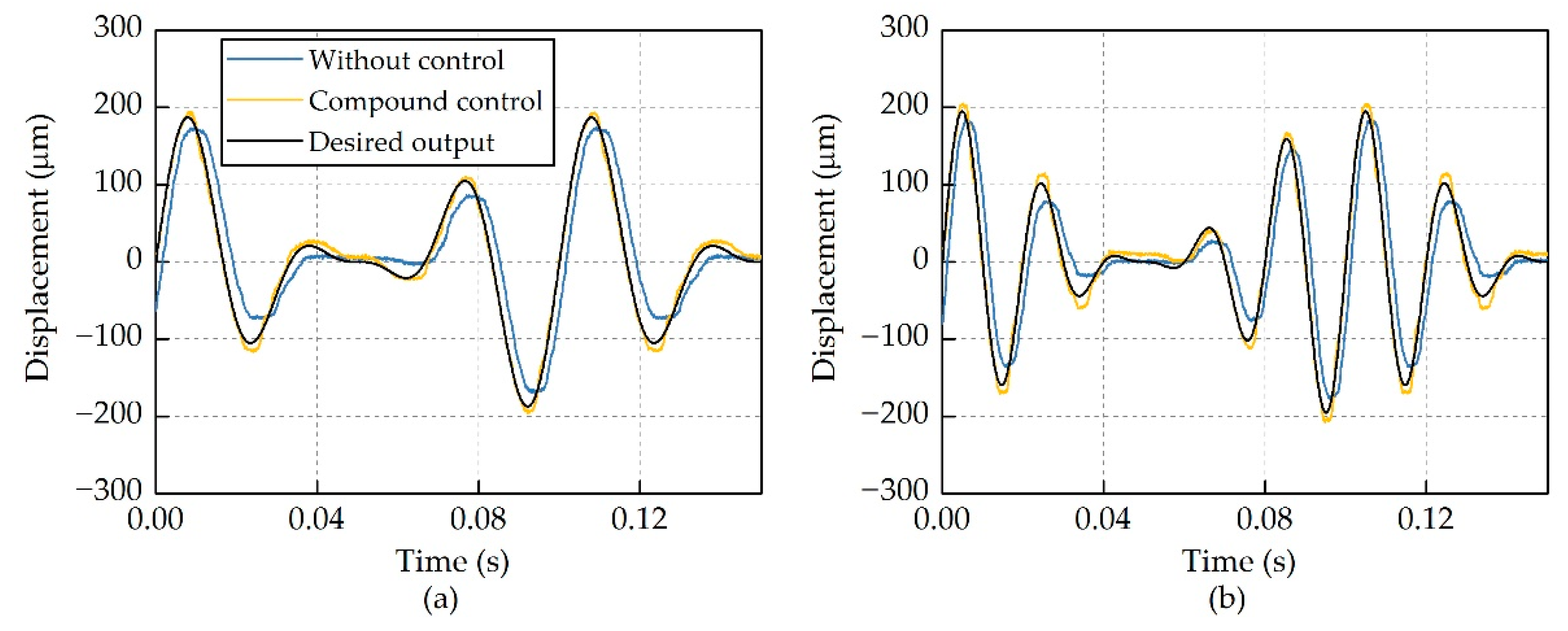
- Bench-top test results demonstrated that the compound control regime could dramatically suppress the hysteresis of this actuator at different frequencies from 10 Hz to 60 Hz, both for single-sinusoidal and multiple-sinusoidal actuation signals. The errors between the desired outputs and the measured outputs were reduced from 65 μm to 9 μm with the compound control at 10 Hz, and significant hysteresis suppression was also achieved for other frequencies.
Author Contributions
Funding
Conflicts of Interest
References
- Taylor, R.B. Helicopter Rotor Blade Design for Minimum Vibration; NASA Technical Report 74-A-2; United Technologies Research Center: East Hartford, CT, USA, 1984. [Google Scholar]
- Ganguli, R. Optimum design of a helicopter rotor for low vibration using aeroelastic analysis and response surface methods. J. Sound Vib. 2002, 258, 327–344. [Google Scholar] [CrossRef]
- Breitbach, E.; Buter, A. The main sources of helicopter vibration and noise emissions and adaptive concepts to reduce them. J. Struct. Control. 1996, 3, 21–32. [Google Scholar] [CrossRef]
- Friedmann, P.P. On-blade control of rotor vibration, noise, and performance: Just around the corner? J. Am. Helicopter Soc. 2014, 59, 1–37. [Google Scholar] [CrossRef]
- Straub, F.K.; Anand, V.R.; Brichette, T.S.; Lau, B.H. SMART rotor development and wind tunnel test. In Proceedings of the 35th European Rotorcraft Forum, Hamburg, Germany, 22–25 September 2009; DGLR: Berlin, Germany, 2009; pp. 413–434. [Google Scholar]
- Xuan, Z.; Jin, T.; Ha, N.S.; Goo, N.S.; Kim, T.H.; Bae, B.W.; Ko, H.S.; Yoon, K.W. Performance of piezo-stacks for a piezoelectric hybrid actuator by experiments. J. Intell. Mater. Syst. Struct. 2014, 25, 2212–2220. [Google Scholar] [CrossRef]
- Jin, X.L.; Ha, N.S.; Li, Y.Z.; Goo, N.S.; Woo, J.; Ko, H.S.; Kim, T.H.; Lee, C.S. Experimental study on the performance of a bidirectional hybrid piezoelectric-hydraulic actuator. Int. J. Aeronaut. Space Sci. 2015, 16, 520–528. [Google Scholar] [CrossRef] [Green Version]
- Kurdila, A.J.; Li, J.; Strganac, T.; Webb, G. Nonlinear control methodologies for hysteresis in PZT actuated on-blade elevons. J. Aerosp. Eng. 2003, 16, 167–176. [Google Scholar] [CrossRef]
- Janker, P.; Hermle, F.; Friedl, S.; Lentner, K.; Enenkl, B.; Müller, C. Advanced piezoelectric servo flap system for rotor active control. In Proceedings of the 32nd European Rotorcraft Forum, Maastricht, The Netherlands, 12–14 September 2006; National Aerospace Laboratory: Amsterdam, The Netherlands, 2006; pp. 350–357. [Google Scholar] [CrossRef]
- Viswamurthy, S.R.; Rao, A.K.; Ganguli, R. Dynamic hysteresis of piezoceramic stack actuators used in helicopter vibration control: Experiments and simulations. Smart Mater. Struct. 2007, 16, 1109–1119. [Google Scholar] [CrossRef]
- Viswamurthy, S.R.; Ganguli, R. Effect of piezoelectric hysteresis on helicopter vibration control using trailing-edge flaps. J. Guid. Control. Dyn. 2006, 29, 1201–1209. [Google Scholar] [CrossRef]
- Viswamurthy, S.R.; Ganguli, R. Modeling and compensation of piezoceramic actuator hysteresis for helicopter vibration control. Sens. Actuators A Phys. 2007, 135, 801–810. [Google Scholar] [CrossRef]
- Mallick, R.; Ganguli, R.; Bhat, M.S. An experimental and numerical study of piezoceramic actuator hysteresis in helicopter active vibration control. J. Aerosp. Eng. 2014, 228, 690–705. [Google Scholar] [CrossRef]
- Muir, E.R.; Friedmann, P.P.; Kumar, D. Effect of piezoceramic actuator hysteresis on helicopter vibration and noise reduction. J. Guid. Control. Dyn. 2012, 35, 1299–1311. [Google Scholar] [CrossRef]
- Muir, E.R.; Friedmann, P.P.; Kumar, D. Hysteresis characterization in piezoceramic stack actuators and its influence on vibration and noise reduction in helicopters using actively controlled flaps. In Proceedings of the 51st AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Orlando, FL, USA, 12–15 April 2010; American Institute for Aeronautics and Astronautics: Reston, VA, USA, 2010; pp. 6513–6532. [Google Scholar] [CrossRef] [Green Version]
- Ganguli, R.; Viswamurthy, S.R. Piezoelectric actuators in helicopter active vibration control. In Micro and Smart Devices and Systems; Springer: New Delhi, India, 2014; pp. 111–125. [Google Scholar] [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal. Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Chang, C.M.; Strano, S.; Terzo, M. Modeling of hysteresis in vibration control systems by means of the Bouc-Wen model. Shock. Vib. 2016, 2016, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Rakotondrabe, M. Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef] [Green Version]
- Fujii, F.; Tatebatake, K.; Morita, K.; Shiinoki, T. A Bouc-Wen model-based compensation of the frequency-dependent hysteresis of a piezoelectric actuator exhibiting odd harmonic oscillation. Actuators 2018, 7, 37. [Google Scholar] [CrossRef] [Green Version]
- Gan, J.; Zhang, X. Nonlinear hysteresis modeling of piezoelectric actuators using a generalized Bouc-Wen model. Micromachines 2019, 10, 183. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fang, J.; Li, C.; Zhong, W.; Long, Z. A compound control based on the piezo-actuated stage with Bouc-Wen model. Micromachines 2019, 10, 861. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, J.; Dong, L.; Yang, W. A double-acting piezoelectric actuator for helicopter active rotor. Actuators 2021, in press. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Dimensions (mm) | 166 × 46 × 11 |
| Mass (g) | 317 |
| Blocking force (N) | 216 |
| Maximum stroke * (μm) | ±270 |
| Stiffness (N/μm) | 801 |
| Resonance frequency (Hz) | 628 |
| Parameter | Value |
|---|---|
| 5.4 × 10−5 kg | |
| 513 Ns/m | |
| 8.0 × 105 N/m | |
| 5.5 × 10−6 mm/V | |
| 6.1 × 10−1 | |
| 3.9 × 10−2 | |
| 6.5 × 10−3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, J.; Dong, L.; Yang, W. Hysteresis Compensation for a Piezoelectric Actuator of Active Helicopter Rotor Using Compound Control. Micromachines 2021, 12, 1298. https://doi.org/10.3390/mi12111298
Zhou J, Dong L, Yang W. Hysteresis Compensation for a Piezoelectric Actuator of Active Helicopter Rotor Using Compound Control. Micromachines. 2021; 12(11):1298. https://doi.org/10.3390/mi12111298
Chicago/Turabian StyleZhou, Jinlong, Linghua Dong, and Weidong Yang. 2021. "Hysteresis Compensation for a Piezoelectric Actuator of Active Helicopter Rotor Using Compound Control" Micromachines 12, no. 11: 1298. https://doi.org/10.3390/mi12111298