Recent Developments on Modeling for a 3-DOF Micro-Hand Based on AI Methods


Abstract
:1. Introduction
2. Materials and Methods
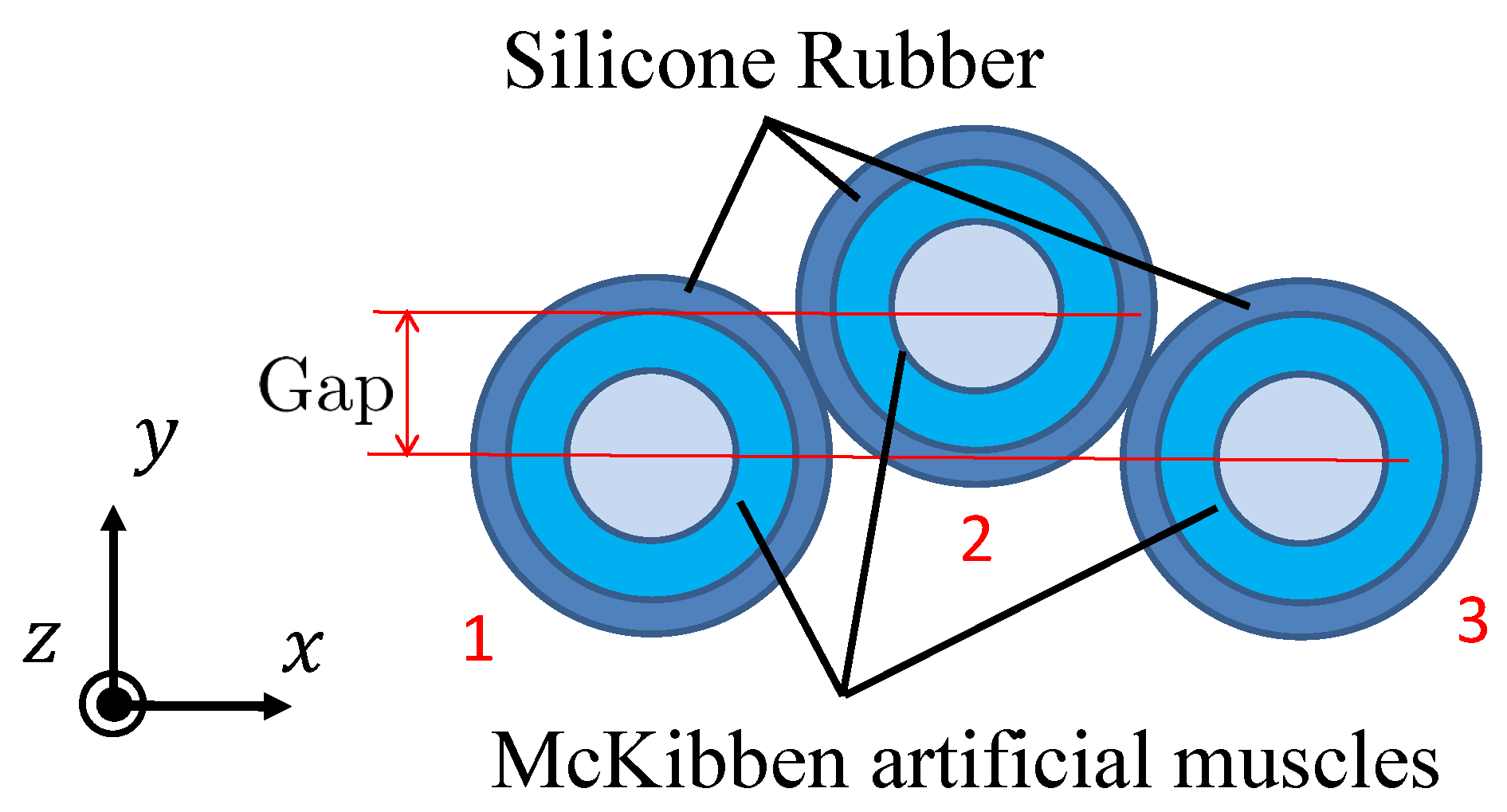
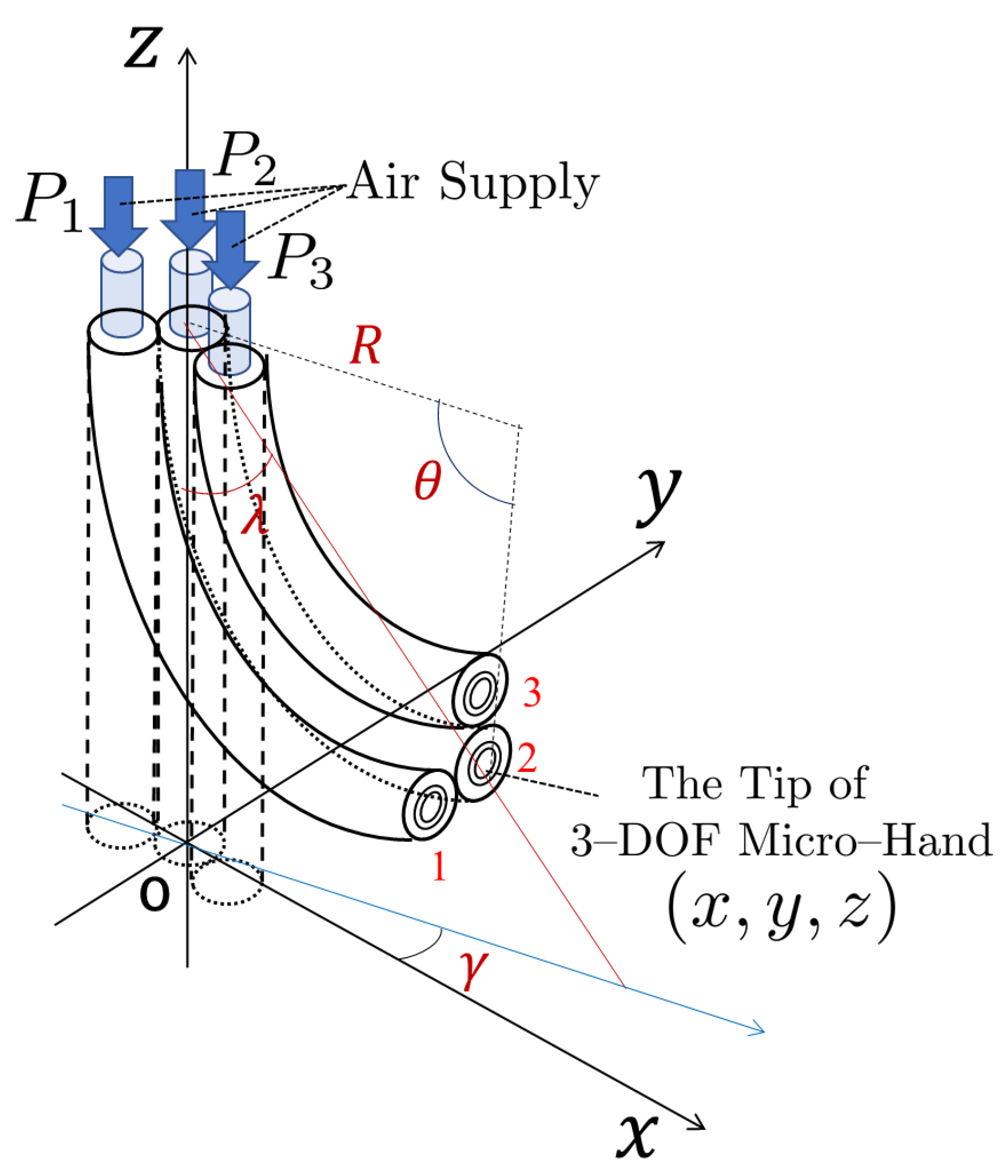
2.1. The Structure of the 3-DOF Micro-Hand
2.2. Previous Method
2.3. Proposed Method
2.3.1. Multi-Output Support Vector Regression
2.3.2. Ant Colony Optimization
- Set ant number m, the coefficient representing pheromone evaporation , the initial pheromone , time counter , cycle number , the maximum cycling times , and a one-dimension array .
- Calculate the probability that the ant moves to each path node with Equation (13). Move the ant to the selected node, and record the coordinate value in the element i of .
- Set , if ant k goes through 12 nodes, jump to (4), otherwise (2).
- Set , if all the ants go through 12 nodes, jump to (5), otherwise (2).
- Obtain MSVR parameters by using and calculate mean absolute error (MAE) between experimental data and the MSVR model.
- Update pheromone with Equation (14), clear , and set .
- If and every ant does not take the same path, jump to (2); if , but every ant takes the same path, then MSVR parameters are optimized.
2.3.3. Experimental System
- The air compressor provides pneumatic pressure for the air filter and the filter sends clean air to the safety regulator.
- The safety regulator limits the pressure to at most not to break the micro-hand.
- The computer sends an electrical signal to the controller for controlling the electro-pneumatic regulator.
- The controller provides 4–20 mA for the electro-pneumatic regulator and decides the aperture of the electro-pneumatic regulator.
- Desired pressures are sent into the micro-hand and it bends or contracts.
- The coordinates of the tip of the micro-hand are captured by two cameras.
- The experimental data is sent to the computer and the input–output relation of the micro-hand is modeled by using MSVR and ACO.
3. Results and Discussion
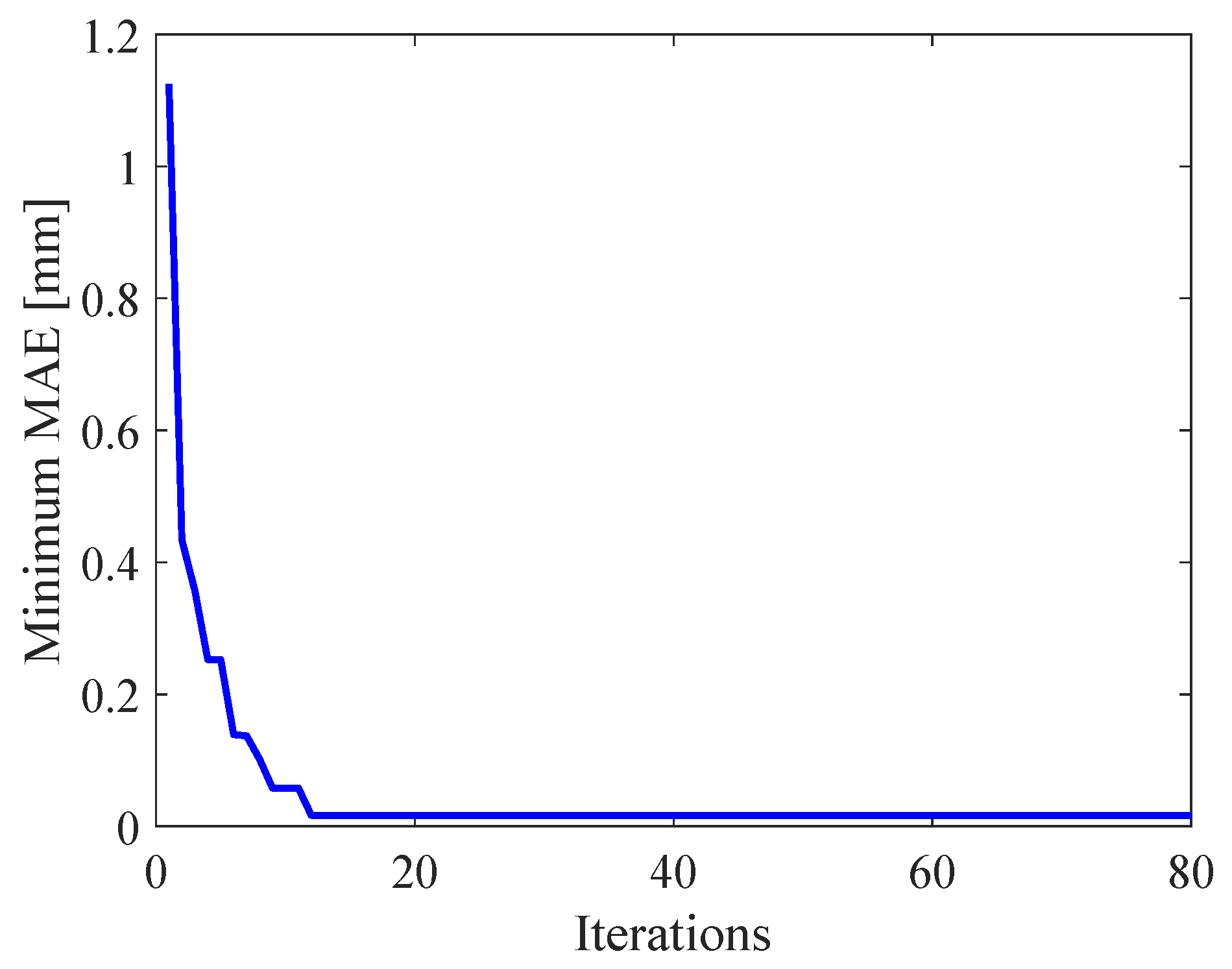
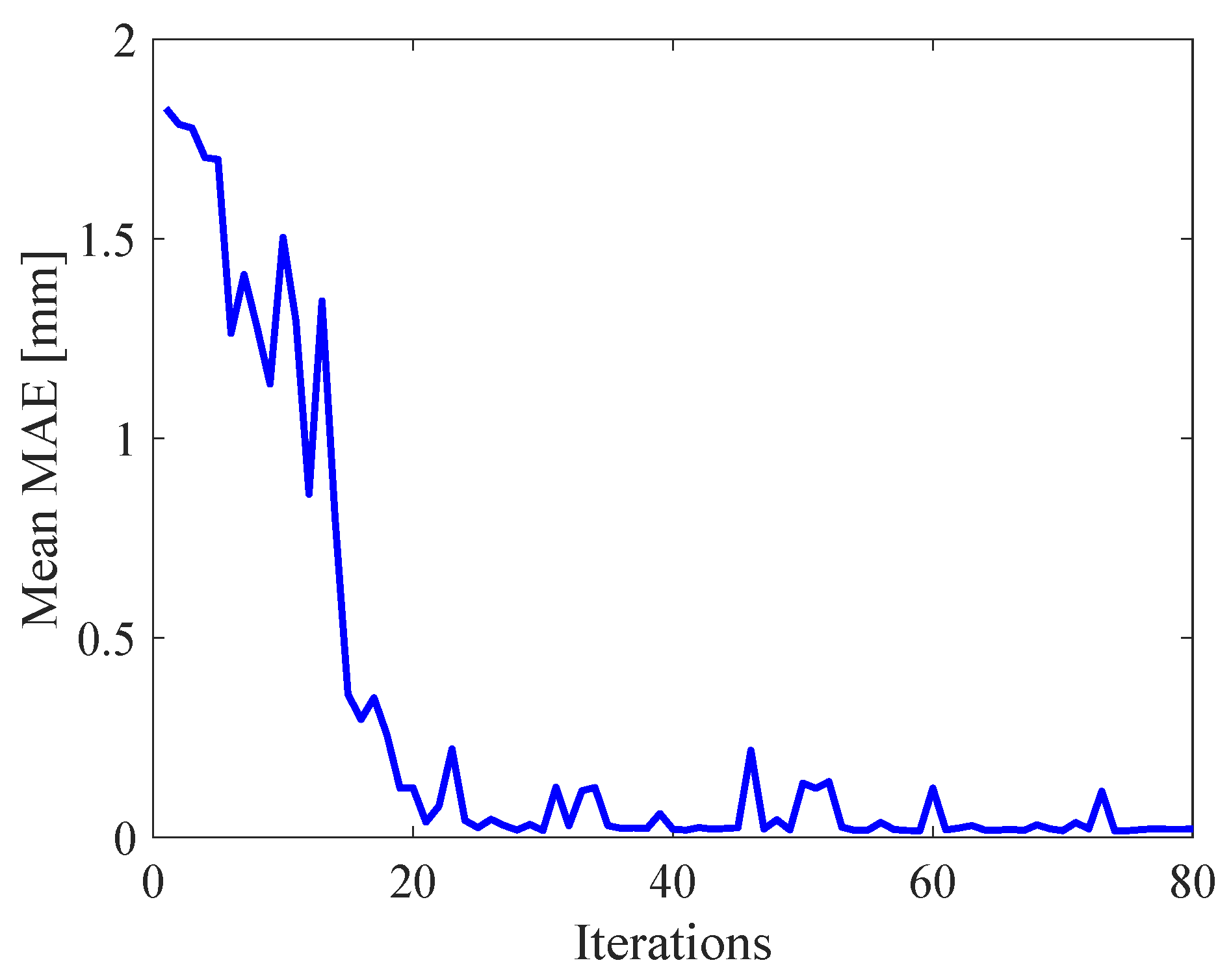
3.1. The Parameters of Multi-Output Support Vector Regression (MSVR) Selected by Ant Colony Optimization (ACO)
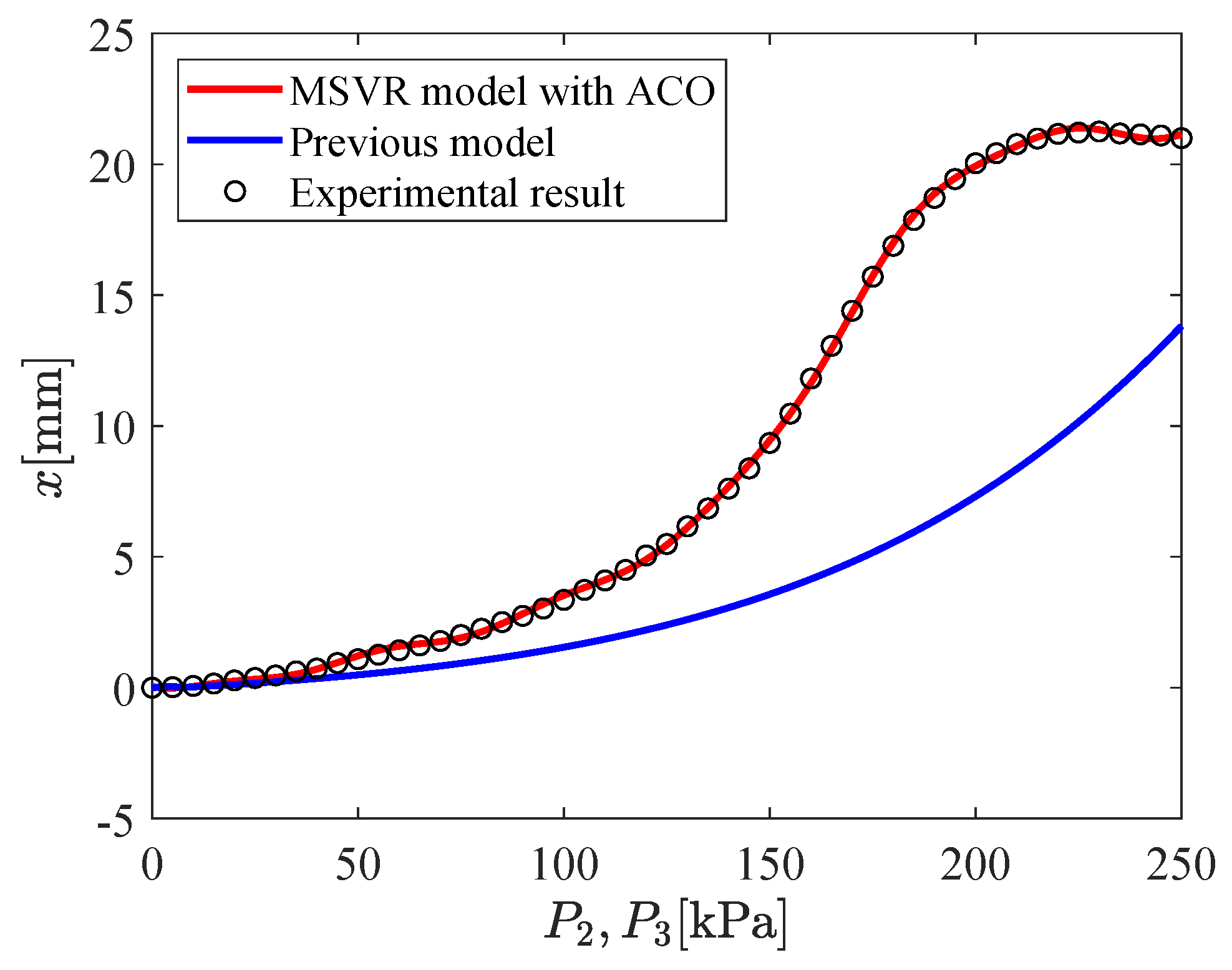
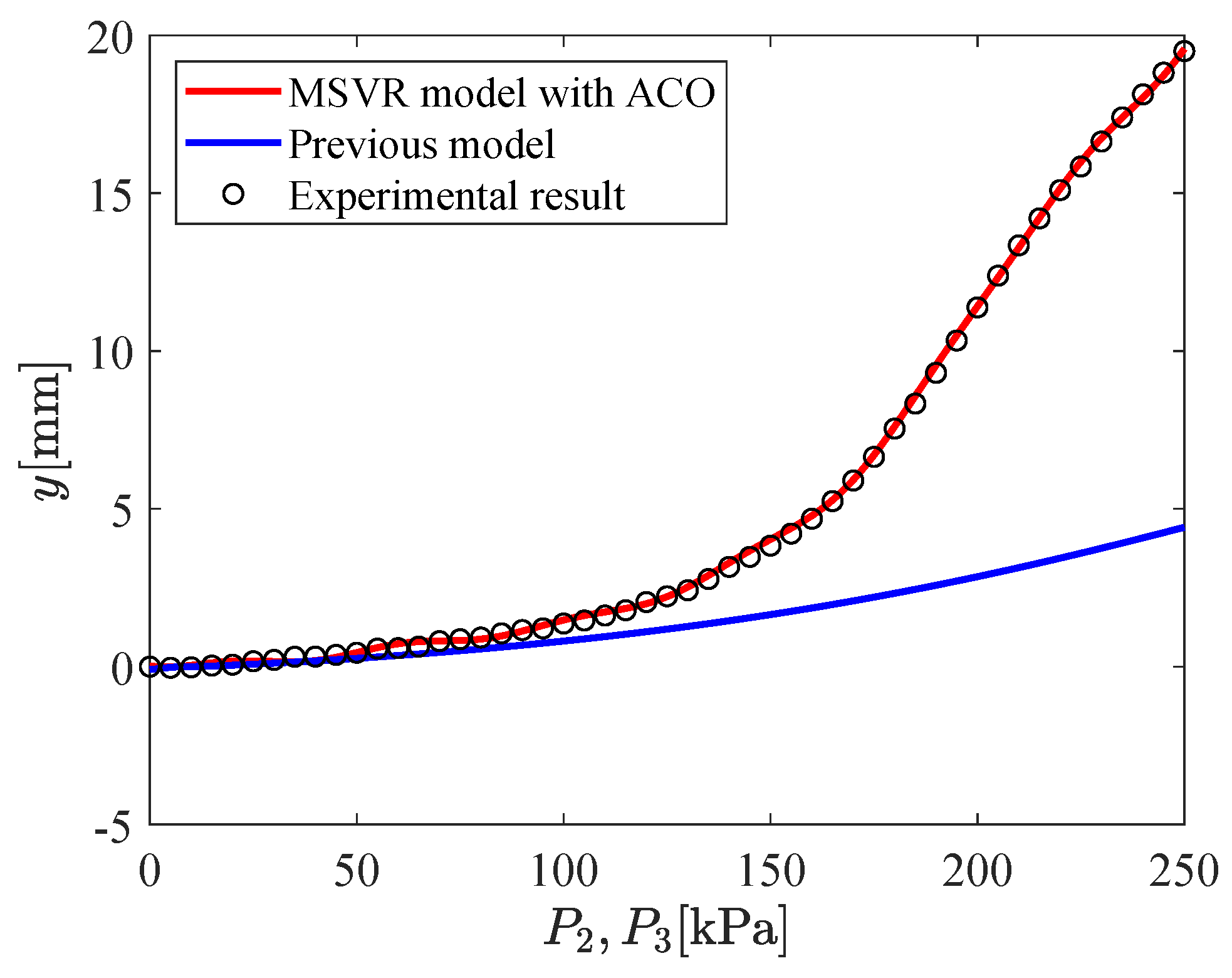
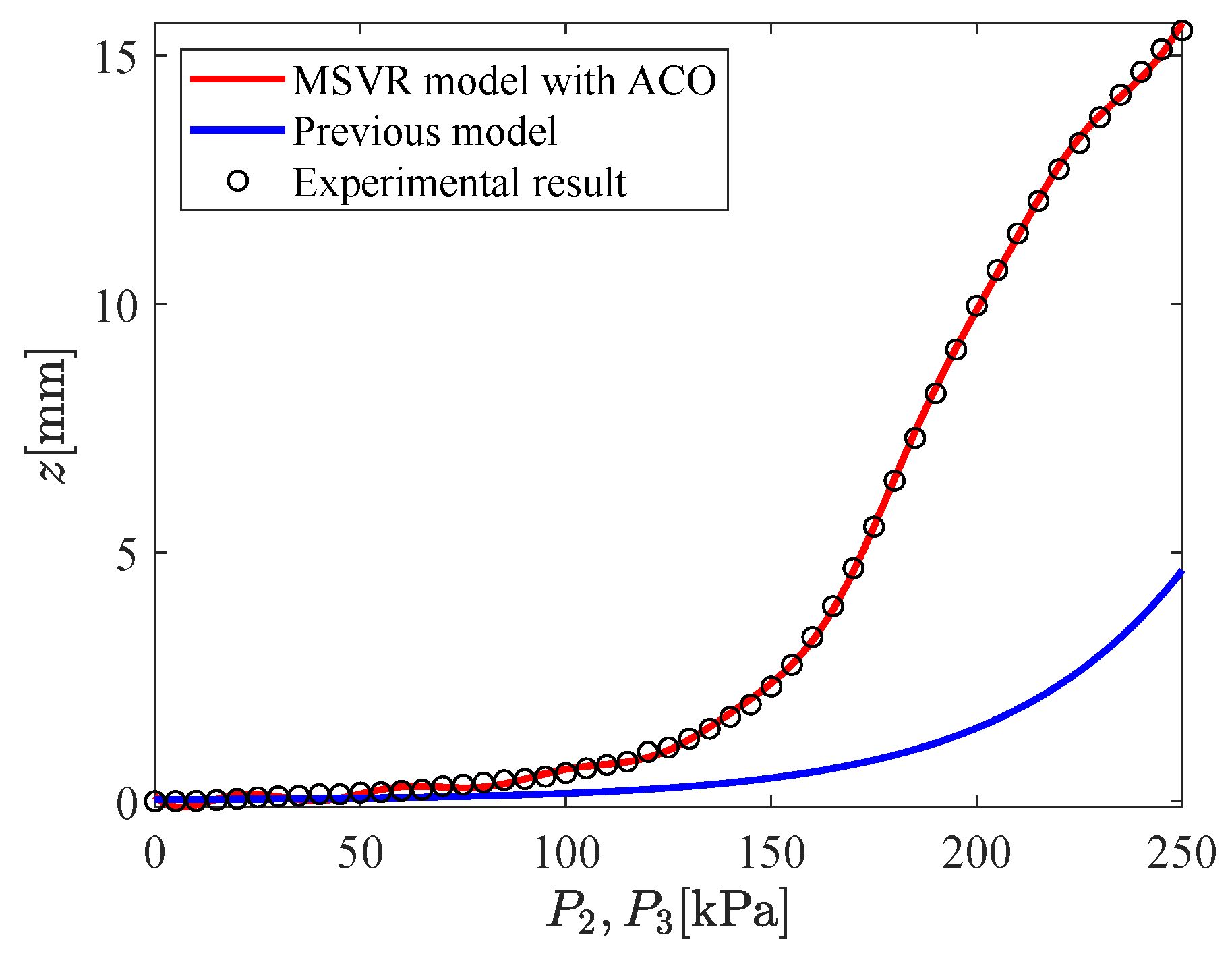
3.2. Model for 3-DOF Micro-Hand Estimated by MSVR
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| DOF | Degrees of freedom |
| AI | Artificial Intelligence |
| FMA | Flexible micro actuator |
| SISO | Single-input single-output |
| MIMO | Multiple-input multiple-output |
| SVM | Support vector machine |
| SVR | Support vector regression |
| MSVR | Multi-output support vector regression |
| ACO | Ant colony optimization |
| TSP | Traveling salesman problems |
| RBF | Radial basis function |
| MAE | Mean absolute error |
References
- Deng, M.; Wang, A. Robust non-linear control design to an ionic polymer metal composite with hysteresis using operator-based approach. IET Control Theory Appl. 2012, 6, 2667–2675. [Google Scholar] [CrossRef]
- Chou, C.P.; Hannaford, B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102. [Google Scholar] [CrossRef] [Green Version]
- Tondu, B.; Lopez, P. Modeling and Control of McKibben artificial muscle Robot Actuators. IEEE Control Syst. Mag. 2000, 20, 15–38. [Google Scholar]
- Itto, T.; Kogiso, K. Hybrid modeling of mckibben pneumatic artificial muscle systems. In Proceedings of the Joint IEEE International Conference on Industrial Technology Southeasetern Symposium on System Theory, Auburn, AL, USA, 14–16 March 2011; Volume 3, pp. 65–70. [Google Scholar]
- Nozaki, T.; Noritsugu, T. Motion analysis of McKibben type pneumatic rubber artificial muscle with finite element method. Int. J. Autom. Technol. 2014, 8, 147–158. [Google Scholar] [CrossRef]
- Suzumori, K. Flexible Microactuator: 1st Report, static characteristics of 3 DOF actuator. Trans. Jpn. Soc. Mech. Eng. C 1989, 55, 2547–2552. (In Japanese) [Google Scholar] [CrossRef] [Green Version]
- Deng, M.; Kawashima, T. Adaptive nonlinear sensorless control for an uncertain miniature pneumatic curling rubber actuator using passivity and robust right coprime factorization. IEEE Trans. Control Syst. Technol. 2015, 24, 318–324. [Google Scholar] [CrossRef]
- Wakimoto, S.; Suzumori, K.; Ogura, K. Miniature pneumatic curling rubber actuator generating bidirectional motion with one air-supply tube. Adv. Robot. 2011, 25, 1311–1330. [Google Scholar] [CrossRef] [Green Version]
- Sudani, M.; Deng, M.; Wakimoto, S. Modeling and operator-based nonlinear control for a miniature pneumatic bending rubber actuator considering bellows. Actuators 2018, 7, 26. [Google Scholar] [CrossRef] [Green Version]
- Fujita, K.; Deng, M.; Wakimoto, S. A miniature bending rubber controlled by using the PSO-SVR-based motion estimation method with the generalized gaussian kernel. Actuators 2017, 6, 6. [Google Scholar] [CrossRef]
- Toyama, Y.; Wakimoto, S. Development of a thin pneumatic rubber actuator generating 3-DOF motion. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics, Qingdao, China, 3–7 December 2016; Volume 12, pp. 1215–1220. [Google Scholar]
- Kawamura, S.; Sudani, M.; Deng, M.; Noge, Y.; Wakimoto, S. Modeling and system integration for a thin pneumatic rubber 3–DOF actuator. Actuators 2019, 8, 32. [Google Scholar] [CrossRef] [Green Version]
- Dubey, D.; Dewangan, U.K.; Soni, M.; Narang, M.K. An Investigation of Application of Artificial Intelligence in Robotic. Int. Res. J. Eng. Technol. 2019, 6, 7. [Google Scholar]
- Panesar, S.; Cagle, Y.; Chander, D.; Morey, J.; Fernandez-Miranda, J.; Kliot, M. Artificial intelligence and the future of surgical robotics. Ann. Surg. 2019, 270, 223–226. [Google Scholar] [CrossRef] [PubMed]
- Vapnik, V. The Nature of Statistical Learning Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Jiang, L.; Deng, M.; Inoue, A. Support vector machine-based two-wheeled mobile robot motion control in a noisy environment. J. Syst. Control Eng. 2008, 222, 733–743. [Google Scholar] [CrossRef]
- Sánchez–Fernández, M.; De–Prado–Cumplido, M.; Arenas–García, J.; Pérez–Cruz, F. SVM multiregression for nonlinear channel estimation in multiple-input multiple-output systems. IEEE Trans. Signal Process. 2004, 52, 2298–2307. [Google Scholar] [CrossRef]
- Bonabeau, E.; Dorigo, M.; Theraulaz, G. Inspiration for optimization from social insect behaviour. Nature 2000, 406, 39–42. [Google Scholar] [CrossRef]
- Silva, C.A.; Runkler, T.A.; Sousa, J.M.; Palm, R. Ant colonies as logistic processes optimizers. In Proceedings of the International Workshop on Ant colonies, Brussels, Belgium, 12–14 September 2002; pp. 76–87. [Google Scholar]
- Deng, M.; Inoue, A.; Kawakami, S. Optimal path planning for material and products transfer in steel works using ACO. In Proceedings of the 2011 International Conference on Advanced Mechatronic Systems, Zhengzhou, China, 11–13 August 2011; pp. 47–50. [Google Scholar]
- Selvi, V.; Umarani, R. Comparative analysis of ant colony and particle swarm optimization techniques. Int. J. Comput. Appl. 2010, 5, 1–6. [Google Scholar] [CrossRef]
- Pérez-Cruz, F.; Navia-Vázquez, A.; Alarcón-Diana, P.L.; Artés-Rodríguez, A. An IRWLS procedure for SVR. In Proceedings of the IEEE 10th European Signal Processing Conference, Tampere, Finland, 4–8 September 2000; pp. 1–4. [Google Scholar]
- Tuia, D.; Verrelst, J.; Alonso, L.; Pérez-Cruz, F.; Camps-Valls, G. Multioutput support vector regression for remote sensing biophysical parameter estimation. IEEE Geosci. Remote Sens. Lett. 2011, 8, 804–808. [Google Scholar] [CrossRef]
- Deng, M.; Matsumoto, N.; Kitayama, M.; Inoue, A. Online estimation of arriving time for robot to soccer ball in RoboCup Soccer using PSO–SVR. In Proceedings of the 2014 International Conference on Advanced Mechatronic Systems, Kumamoto, Japan, 10–12 August 2014; pp. 543–546. [Google Scholar]
- Hellendoorn, H.; Palm, R. Fuzzy system technologies at Siemens R&D. Fuzzy Sets Syst. 1994, 63, 245–269. [Google Scholar]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 29–41. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Chen, X.; He, Z. An ACO-based algorithm for parameter optimization of support vector machines. Expert Syst. Appl. 2010, 37, 6618–6628. [Google Scholar] [CrossRef]
- Zheng, L.; Zhou, H.; Cen, K.; Wang, C. A comparative study of optimization algorithms for low NOx combustion modification at a coal-fired utility boiler. Expert Syst. Appl. 2009, 36, 2780–2793. [Google Scholar] [CrossRef]
- Ding, L.; Lv, J.; Li, X.; Li, L. Support vector regression and ant colony optimization for HVAC cooling load prediction. In Proceedings of the International Symposium on Computer, Communication, Control and Automation, Tainan, Taiwan, 5–7 May 2010; Volume 1, pp. 537–541. [Google Scholar]
- Zhou, H.; Zhao, J.; Zheng, L.; Wang, C.; Cen, K. Modeling NOx emissions from coal-fired utility boilers using support vector regression with ant colony optimization. Eng. Appl. Artif. Intell. 2012, 25, 147–158. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value |
|---|---|---|
| Evaporation coefficient | ||
| Quantity of initial pheromone |
| Parameter | Definition | Value |
|---|---|---|
| C | Penalty parameter | |
| Error accuracy parameter | ||
| Hyper-parameter in RBF kernel function |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kawamura, S.; Deng, M. Recent Developments on Modeling for a 3-DOF Micro-Hand Based on AI Methods. Micromachines 2020, 11, 792. https://doi.org/10.3390/mi11090792
Kawamura S, Deng M. Recent Developments on Modeling for a 3-DOF Micro-Hand Based on AI Methods. Micromachines. 2020; 11(9):792. https://doi.org/10.3390/mi11090792
Chicago/Turabian StyleKawamura, Shuhei, and Mingcong Deng. 2020. "Recent Developments on Modeling for a 3-DOF Micro-Hand Based on AI Methods" Micromachines 11, no. 9: 792. https://doi.org/10.3390/mi11090792