Novel Decomposition Technique on Rational-Based Neuro-Transfer Function for Modeling of Microwave Components

 , , ,
, , ,
Abstract
:1. Introduction
2. The High-Sensitivity Issue in the Existing Rational-Based Neuro-TF Method
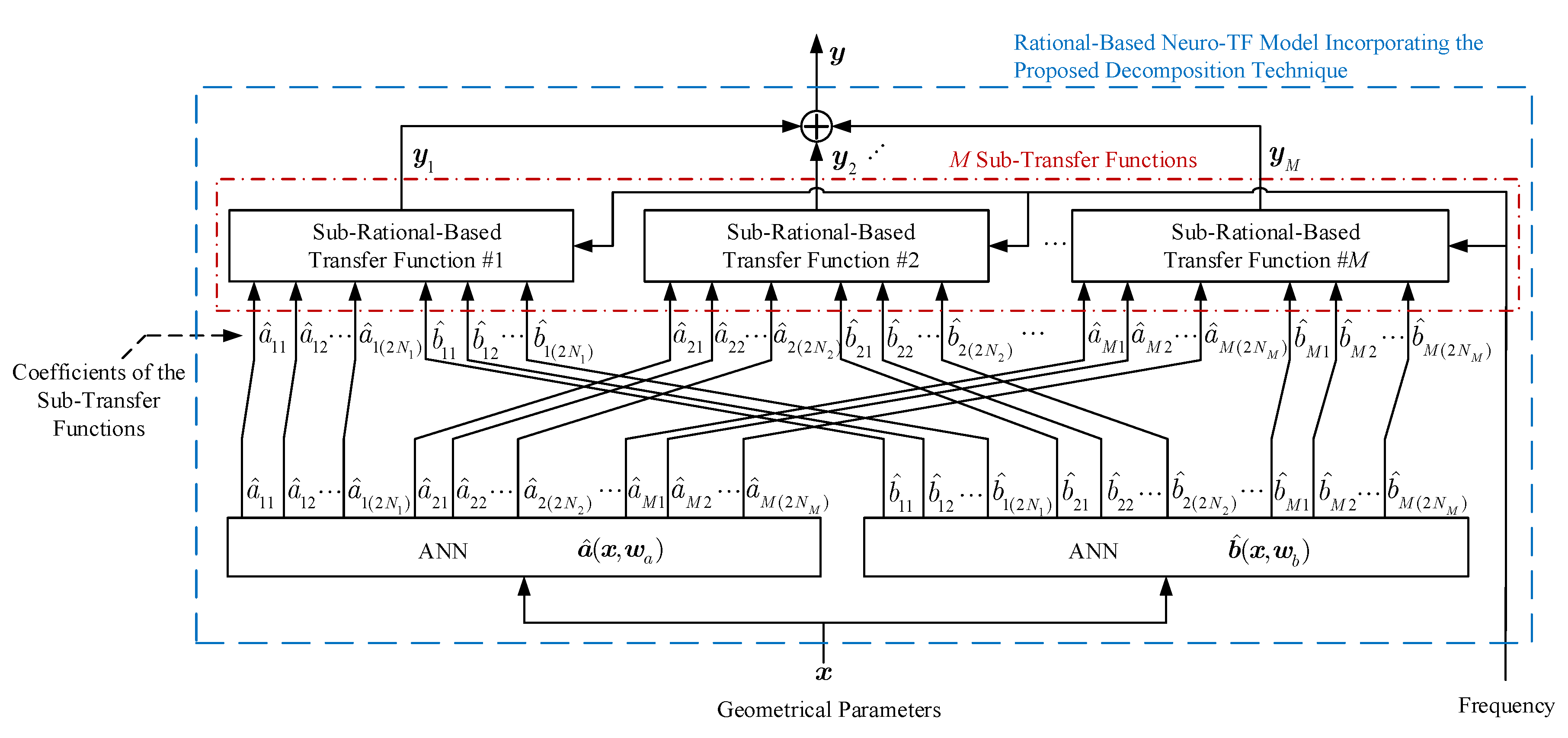
3. Proposed Decomposition Technique for Development of Rational-Based Neuro-TF Model
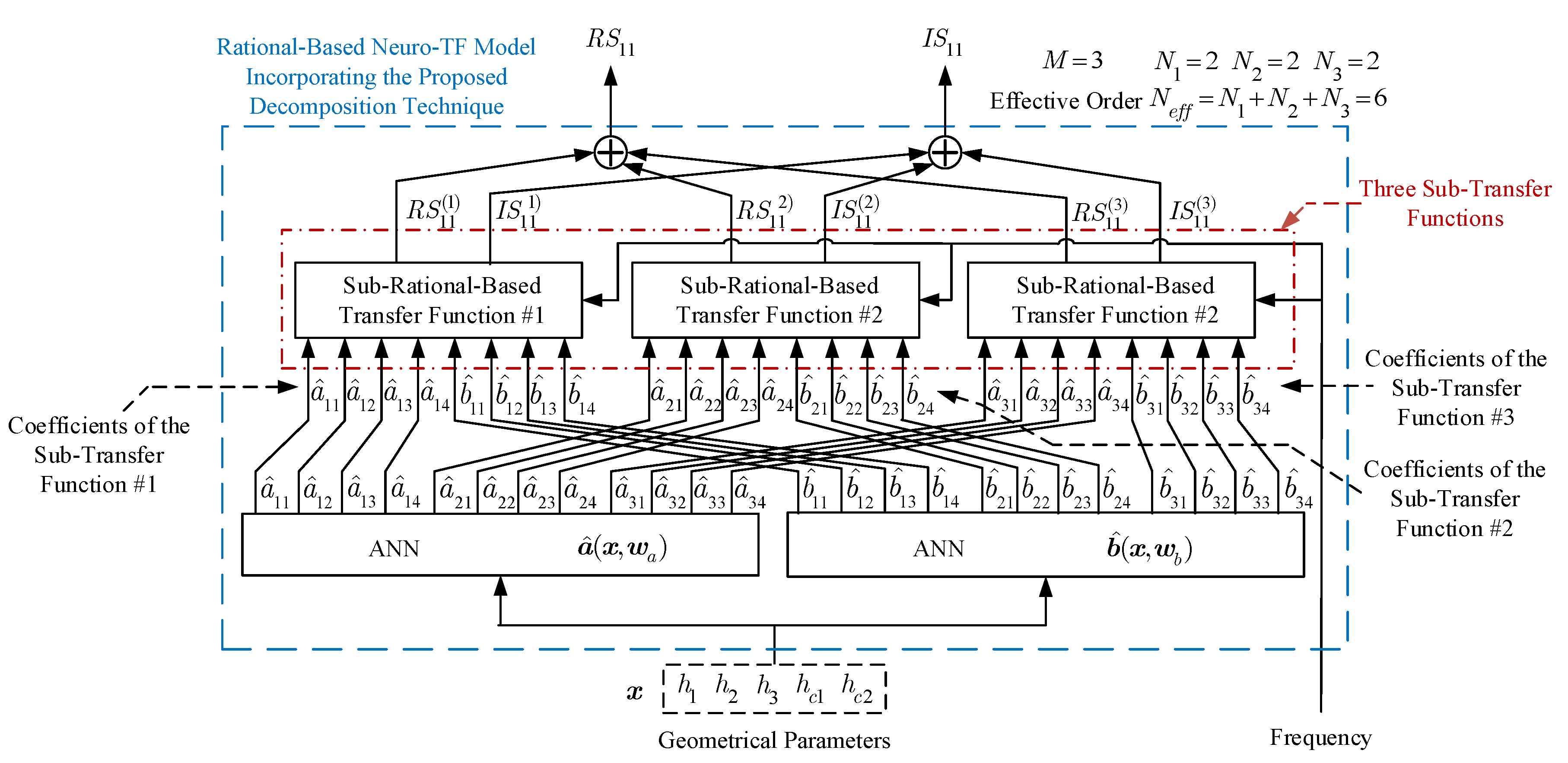
3.1. Concept of the Decomposition Technique for Rational-Based Neuro-TF Model
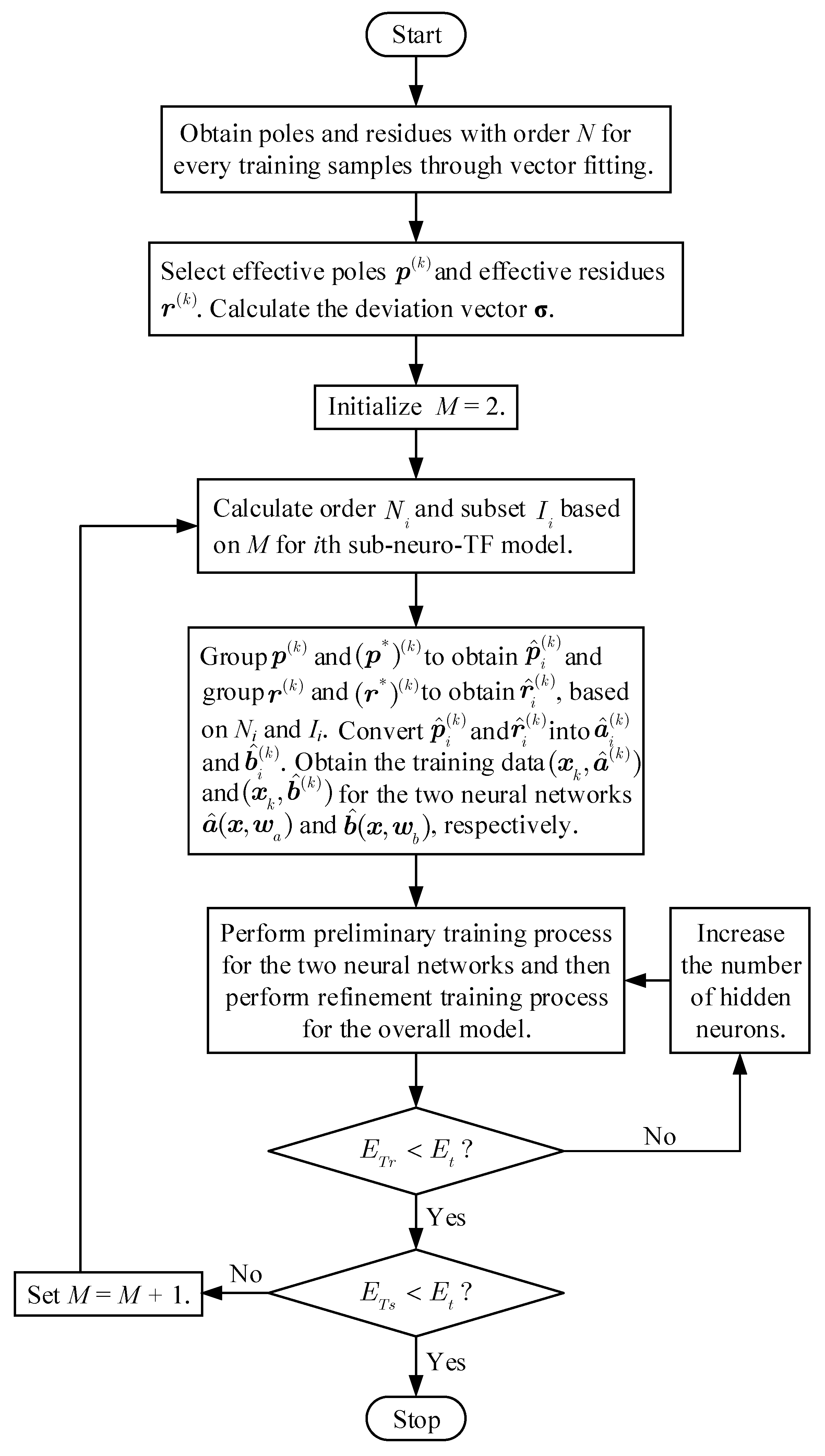
3.2. Proposed Decomposition Technique for Parameter Extraction and Model Development
- Step 1:
- Step 2:
- Step 3:
- Initialize the number M of the sub-neuro-TF models to two.
- Step 4:
- Step 5:
- Step 6:
- Perform the preliminary training of the two neural networks and refinement training of the overall model by (34).
- Step 7:
- Use the training data (, ) to verify the trained overall model. If the training error is lower than a user-defined threshold , go to Step 8. Otherwise, increase the number of hidden neurons and go to Step 6.
- Step 8:
- Use the testing data to verify the overall model. If the testing error is lower than the user-defined threshold , go to Step 9. Otherwise, increase the number M of sub-neuro-TF models by one (i.e., ) and go to Step 4.
- Step 9:
- Stop the modeling process.
4. Application Examples
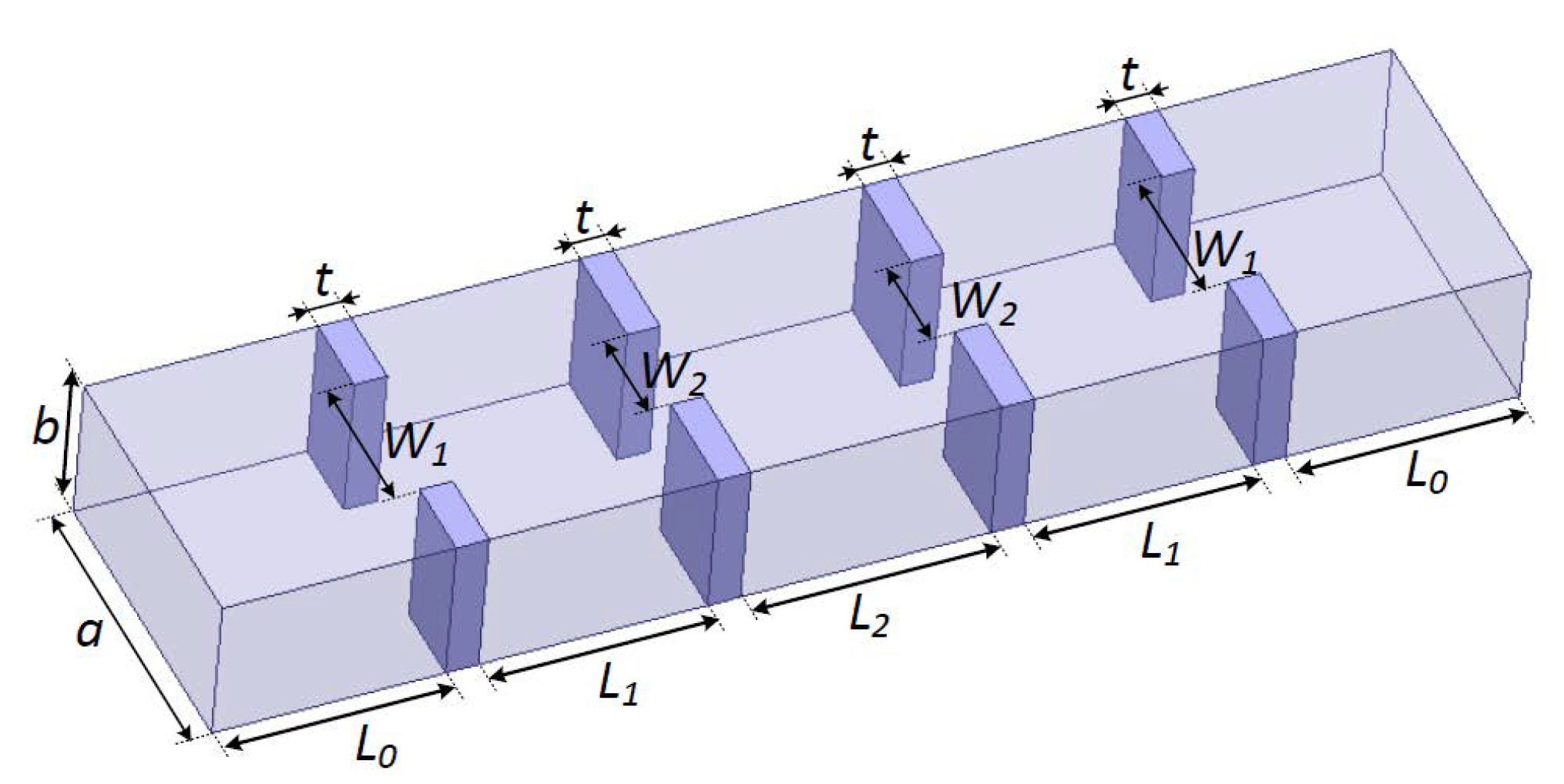
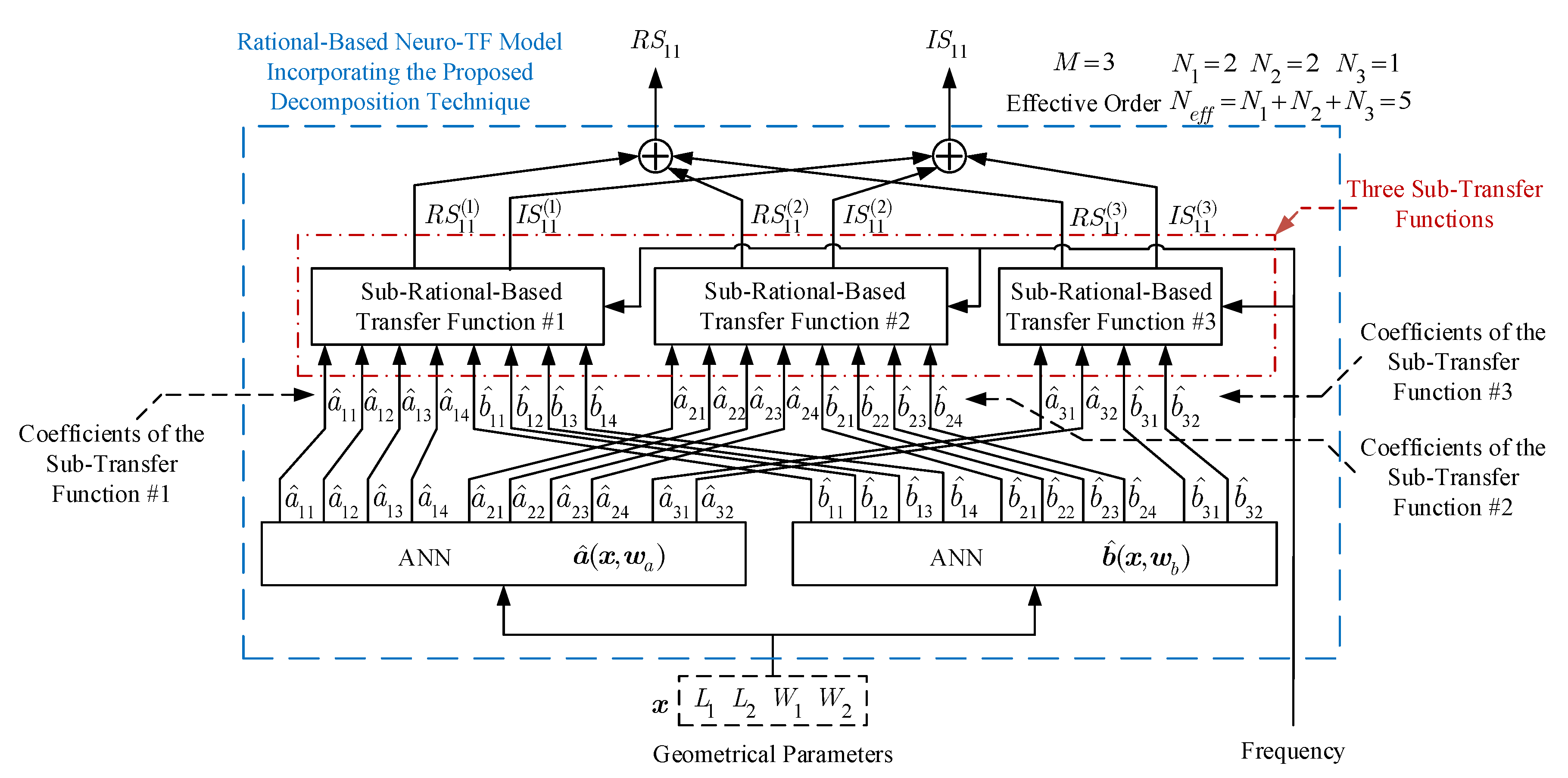
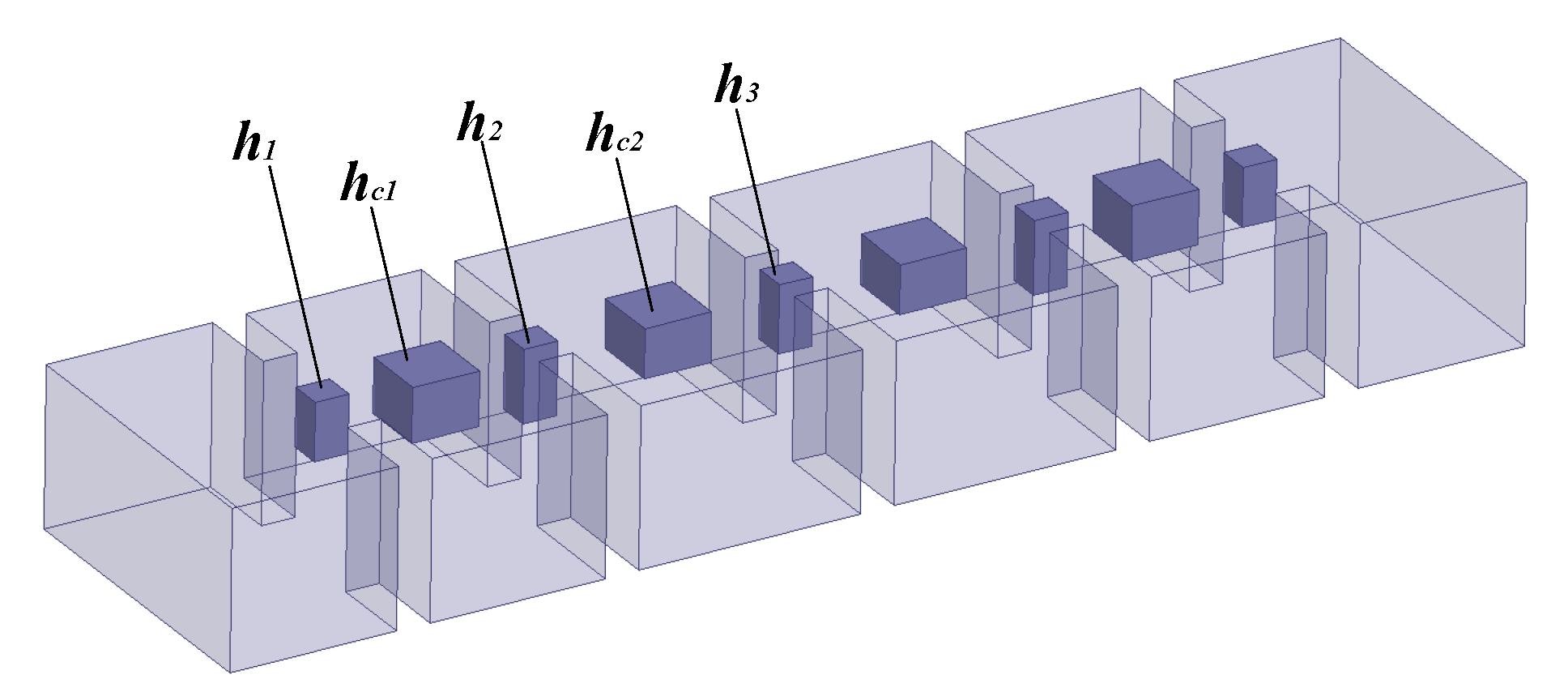
4.1. Three-Order Waveguide Filter Modeling
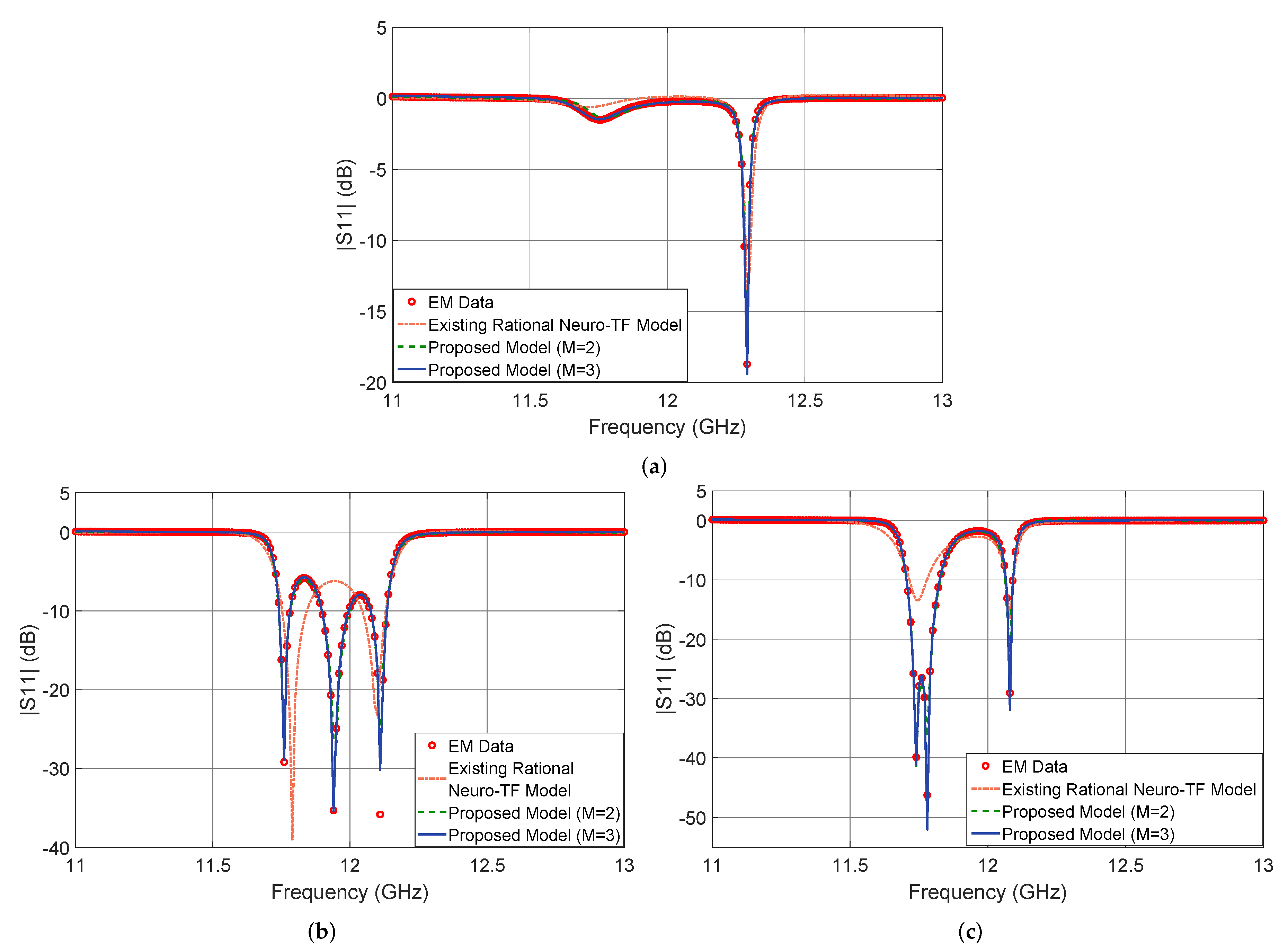
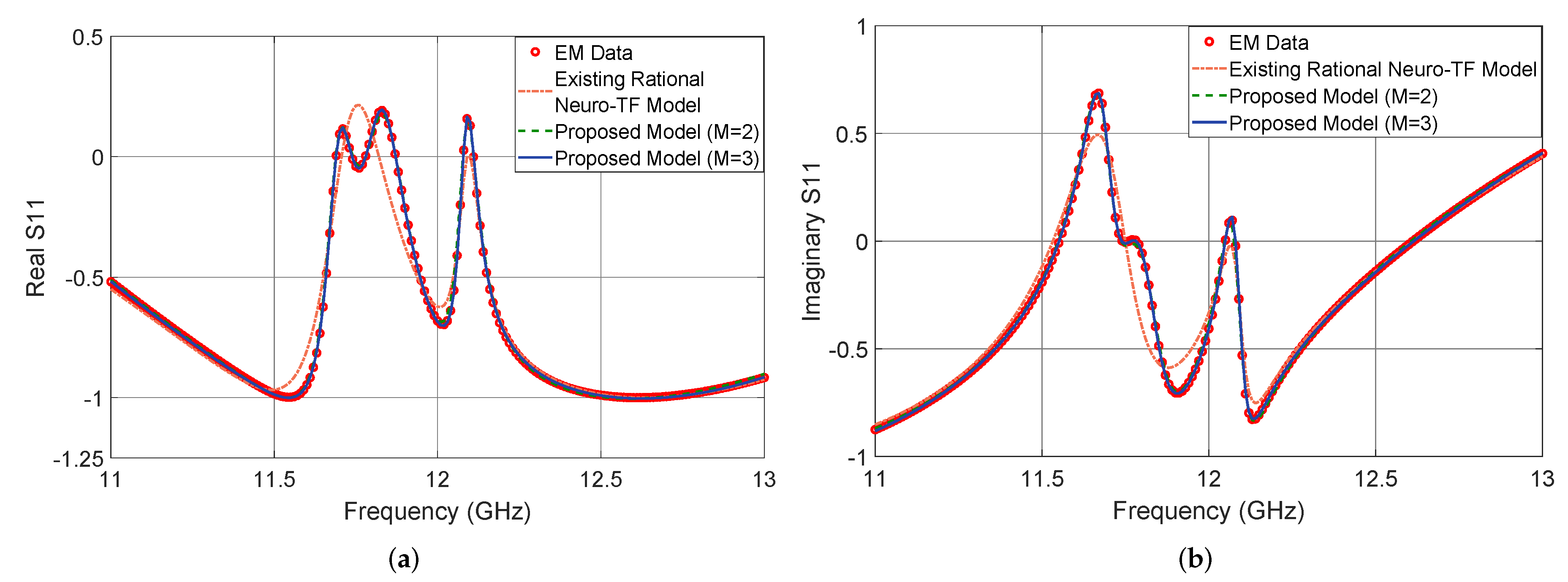
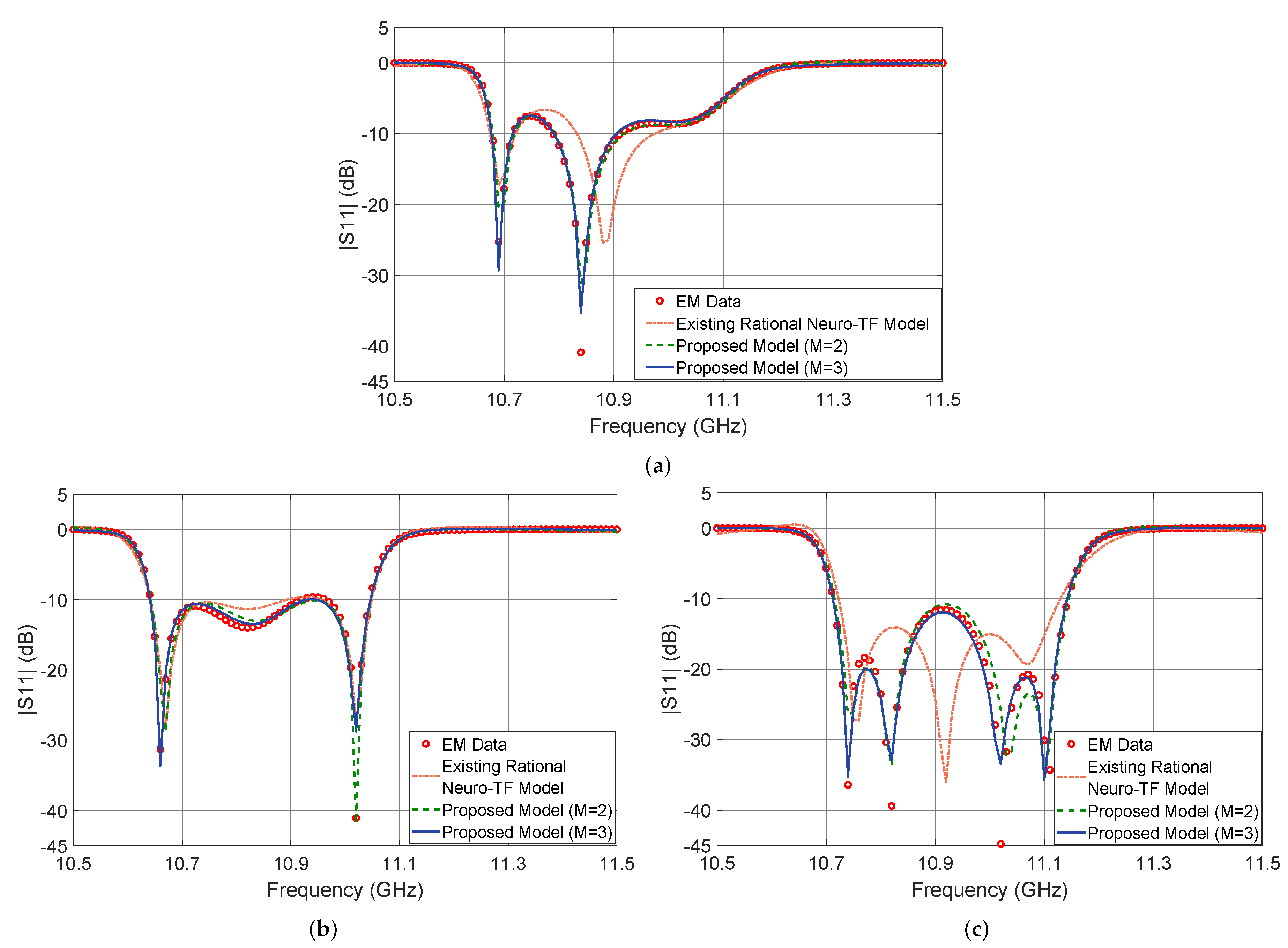
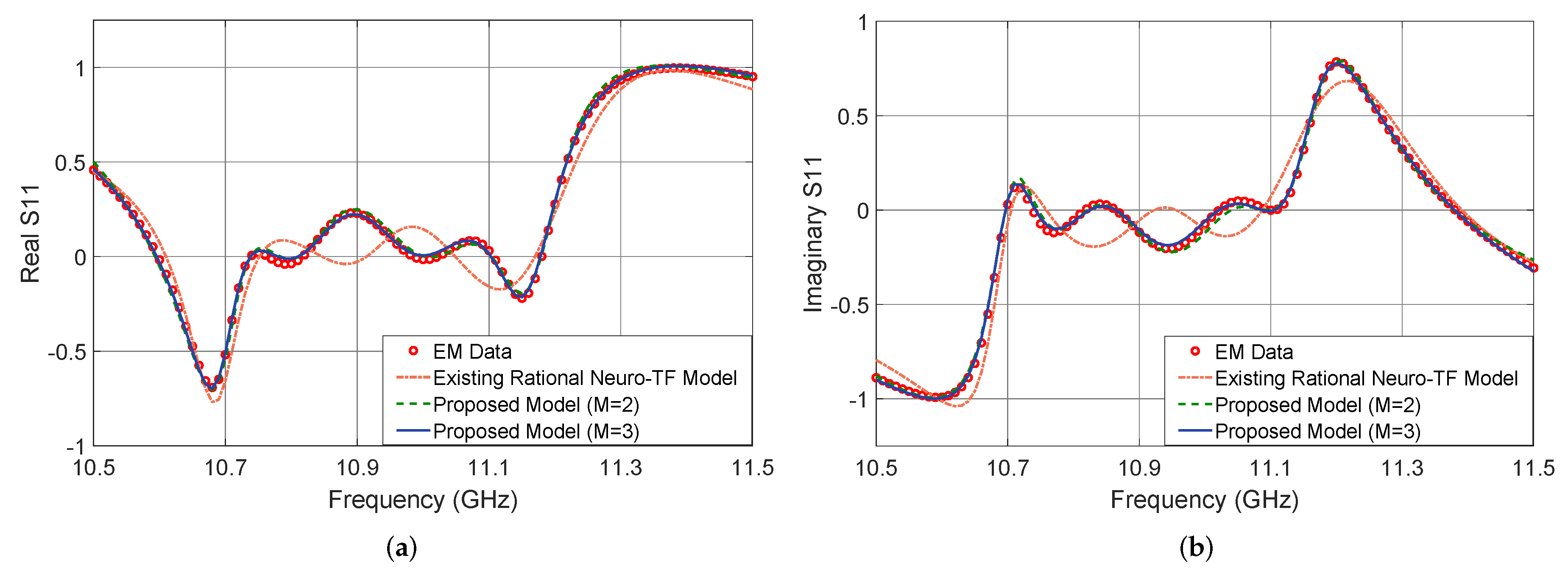
4.2. Four-Order Bandpass Filter Modeling
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rayas-Sanchez, J.E. EM-based optimization of microwave circuits using artificial neural networks: The state-of-the-art. IEEE Trans. Microw. Theory Tech. 2004, 52, 420–435. [Google Scholar] [CrossRef]
- Rizzoli, V.; Costanzo, A.; Masotti, D.; Lipparini, A.; Mastri, F. Computer-aided optimization of nonlinear microwave circuits with the aid of electromagnetic simulation. IEEE Trans. Microw. Theory Tech. 2004, 52, 362–377. [Google Scholar] [CrossRef]
- Steer, M.B.; Bandler, J.W.; Snowden, C.M. Computer-aided design of RF and microwave circuits and systems. IEEE Trans. Microw. Theory Tech. 2002, 52, 996–1005. [Google Scholar] [CrossRef] [Green Version]
- Burrascano, P.; Fiori, S.; Mongiardo, M. A review of artificial neural networks applications in microwave computer-aided design. Int. J. RF Microw. Comput. Aided Eng. 1999, 9, 158–174. [Google Scholar] [CrossRef]
- Ding, X.; Devabhaktuni, V.K.; Chattaraj, B.; Yagoub, M.C.E.; Deo, M.; Xu, J.; Zhang, Q.J. Neural-network approaches to electromagnetic based modeling of passive components and their applications to high frequency and high-speed nonlinear circuit optimization. IEEE Trans. Microw. Theory Tech. 2004, 52, 436–449. [Google Scholar] [CrossRef]
- Sadrossadat, S.A.; Cao, Y.; Zhang, Q.J. Parametric Modeling of Microwave Passive Components Using Sensitivity-Analysis-Based Adjoint Neural-Network Technique. IEEE Trans. Microw. Theory Tech. 2013, 61, 1733–1747. [Google Scholar] [CrossRef]
- Zhang, Q.J.; Gupta, K.C.; Devabhaktuni, V.K. Artificial neural networks for RF and microwave design-From theory to practice. IEEE Trans. Microw. Theory Tech. 2003, 51, 1339–1350. [Google Scholar] [CrossRef]
- Bandler, J.W.; Ismail, M.A.; Rayas-Sanchez, J.E.; Zhang, Q.J. Neuromodeling of microwave circuits exploiting space-mapping technology. IEEE Trans. Microw. Theory Tech. 1999, 47, 2417–2427. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, J.; Yagoub, M.C.E.; Ding, R.; Zhang, Q.J. Efficient analytical formulation and sensitivity analysis of neuro-space mapping for nonlinear microwave device modeling. IEEE Trans. Microw. Theory Tech. 2005, 53, 2752–2767. [Google Scholar] [CrossRef]
- Gorissen, D.; Zhang, L.; Zhang, Q.J.; Dhaene, T. Evolutionary neuro-space mapping technique for modeling of nonlinear microwave devices. IEEE Trans. Microw. Theory Tech. 2011, 59, 213–229. [Google Scholar] [CrossRef] [Green Version]
- Kabir, H.; Zhang, L.; Yu, M.; Aaen, P.H.; Wood, J.; Zhang, Q.J. Smart modeling of microwave device. IEEE Microw. Mag. 2010, 11, 105–118. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Na, W.; Zhu, L.; Ma, J.; Zhang, Q.J. A Wiener-type dynamic neural network approach to the modeling of nonlinear microwave devices. IEEE Trans. Microw. Theory Tech. 2017, 65, 2043–2062. [Google Scholar] [CrossRef]
- Na, W.; Feng, F.; Zhang, C.; Zhang, Q.J. A unified automated parametric modeling algorithm using knowledge-based neural network and l1 optimization. IEEE Trans. Microw. Theory Tech. 2017, 65, 729–745. [Google Scholar] [CrossRef]
- Zhang, C.; Jin, J.; Na, W.; Zhang, Q.-J.; Yu, M. Multivalued neural network inverse modeling and applications to microwave filters. IEEE Trans. Microw. Theory Tech. 2018, 66, 3781–3797. [Google Scholar] [CrossRef]
- Jin, J.; Zhang, C.; Feng, F.; Na, W.; Ma, J.; Zhang, Q.-J. Deep neural network technique for high-dimensional microwave modeling and applications to parameter extraction of microwave filters. IEEE Trans. Microw. Theory Tech. 2019, 67, 4140–4155. [Google Scholar] [CrossRef]
- Huang, A.-D.; Zhong, Z.; Wu, W.; Guo, Y.-X. An artificial neural network-based electrothermal model for GaN HEMTs with dynamic trapping effects consideration. IEEE Trans. Microw. Theory Tech. 2016, 64, 2519–2528. [Google Scholar] [CrossRef]
- Zhang, Q.J.; Gupta, K.C. Neural Networks for RF and Microwave Design; Artech House: Norwood, MA, USA, 2000. [Google Scholar]
- Mkadem, F.; Boumaiza, S. Physically inspired neural network model for RF power amplifier behavioral modeling and digital predistortion. IEEE Trans. Microw. Theory Tech. 2011, 59, 913–923. [Google Scholar] [CrossRef]
- Xu, J.; Horn, J.; Iwamoto, M.; Root, D.E. Large-signal FET model with multiple time scale dynamics from nonlinear vector network analyzer data. In Proceedings of the 2010 IEEE MTT-S International Microwave Symposium, Anaheim, CA, USA, 23–28 May 2010; pp. 417–420. [Google Scholar]
- Zhu, L.; Zhang, Q.J.; Liu, K.; Ma, Y.; Peng, B.; Yan, S. A novel dynamic neuro-space mapping approach for nonlinear microwave device modeling. IEEE Microw. Wirel. Compon. Lett. 2016, 26, 131–133. [Google Scholar] [CrossRef]
- Gongal-Reddy, V.-M.-R.; Feng, F.; Zhang, Q.J. Parametric modeling of millimeter-wave passive components using combined neural networks and transfer functions. In Proceedings of the Global Symposium on Millimeter Waves (GSMM), Montreal, QC, Canada, 25–27 May 2015; pp. 1–3. [Google Scholar]
- Feng, F.; Zhang, C.; Ma, J.; Zhang, Q.J. Parametric modeling of EM behavior of microwave components using combined neural networks and pole-residue-based transfer functions. IEEE Trans. Microw. Theory Tech. 2016, 64, 60–77. [Google Scholar] [CrossRef]
- Feng, F.; Gongal-Reddy, V.-M.-R.; Zhang, C.; Ma, J.; Zhang, Q.-J. Parametric modeling of microwave components using adjoint neural networks and pole-residue transfer functions with EM sensitivity analysis. IEEE Trans. Microw. Theory Tech. 2017, 65, 1955–1975. [Google Scholar] [CrossRef]
- Zhao, Z.; Feng, F.; Zhang, W.; Zhang, J.; Jin, J.; Zhang, Q.J. Parametric Modeling of EM Behavior of Microwave Components Using Combined Neural Networks and Hybrid-Based Transfer Functions. IEEE Access 2020, 8, 93922–93938. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, G.; Zhang, Q.J. A new training approach for parametric modeling of microwave passive components using combined neural networks and transfer functions. IEEE Trans. Microw. Theory Tech. 2009, 57, 2727–2742. [Google Scholar]
- Gustavsen, B.; Semlyen, A. Rational approximation of frequency domain responses by vector fitting. IEEE Trans. Power Deliv. 1999, 14, 1052–1061. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.; Feng, F.; Zhang, W.; Jin, J.; Ma, J.; Zhang, Q.J. A novel training approach for parametric modeling of microwave passive components using Pade via Lanczos and EM sensitivities. IEEE Trans. Microw. Theory Tech. 2020, 68, 2215–2233. [Google Scholar] [CrossRef]
- Schmidt, S.R.; Launsby, R.G. Understanding Industrial Designed Experiments; Air Force Academy: Colorado Springs, CO, USA, 1992. [Google Scholar]
- Zhang, C.; Feng, F.; Gongal-Reddy, V.-M.-R.; Zhang, Q.J.; Bandler, J.W. Cognition-driven formulation of space mapping for equal-ripple optimization of microwave filters. IEEE Trans. Microw. Theory Tech. 2015, 63, 2154–2165. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coeff. | Transfer Function | Sensitivity of Transfer Function Response w.r.t the Coeff. | |
|---|---|---|---|
| Existing Rational-Based Neuro-TF model (without Decom-position) | |||
| Proposed Rational-Based Neuro-TF model (with Decom-position) | |||
| Geometrical Parameters (mm) | Training Samples (49 Samples) | Test Samples (49 Samples) | |||||
|---|---|---|---|---|---|---|---|
| Min | Max | Steps | Min | Max | Steps | ||
| Case 1 (Narrower Range) | 13.84 | 14.12 | 0.05 | 13.86 | 14.10 | 0.04 | |
| 15.05 | 15.35 | 0.05 | 15.07 | 15.33 | 0.04 | ||
| 8.91 | 9.09 | 0.03 | 8.93 | 9.08 | 0.03 | ||
| 5.94 | 6.06 | 0.02 | 5.95 | 6.05 | 0.02 | ||
| Case 2 (Increased Range) | 13.70 | 14.26 | 0.09 | 13.75 | 14.21 | 0.08 | |
| 14.90 | 15.50 | 0.10 | 14.95 | 15.45 | 0.08 | ||
| 8.82 | 9.18 | 0.06 | 8.85 | 9.15 | 0.05 | ||
| 5.88 | 6.12 | 0.04 | 5.90 | 6.10 | 0.03 | ||
| Case 3 (Wider Range) | 13.28 | 14.68 | 0.23 | 13.40 | 14.56 | 0.19 | |
| 14.44 | 15.96 | 0.25 | 14.57 | 15.83 | 0.21 | ||
| 8.55 | 9.45 | 0.15 | 8.63 | 9.38 | 0.13 | ||
| 5.70 | 6.30 | 0.10 | 5.75 | 6.25 | 0.08 | ||
| Modeling Methods | No. of Sub-Models | or | No. of Hidden Neurons | Average Training Error | Average Testing Error | ||
|---|---|---|---|---|---|---|---|
| Case 1 (Narrower Range) | Existing Rational Neuro-TF Method | 1 | 5 | NN for Numerator | 10 | 0.630 % | 0.718 % |
| NN for Denominator | 10 | ||||||
| Proposed Rational Neuro-TF Method | 2 | 3 2 | NN for Numerator | 10 | 0.239 % | 0.267 % | |
| NN for Denominator | 10 | ||||||
| Case 2 (Increased Range) | Existing Rational Neuro-TF Method | 1 | 5 | NN for Numerator | 10 | 1.953% | 2.017% |
| NN for Denominator | 10 | ||||||
| Proposed Rational Neuro-TF Method | 2 | 3 2 | NN for Numerator | 10 | 0.467% | 0.496% | |
| NN for Denominator | 10 | ||||||
| Case 3 (Wider Range) | Existing Rational Neuro-TF Method | 1 | 5 | NN for Numerator | 10 | 5.073% | 6.604% |
| NN for Denominator | 10 | ||||||
| 1 | 5 | NN for Numerator | 40 | 3.222% | 50.69% | ||
| NN for Denominator | 40 | ||||||
| Proposed Rational Neuro-TF Method | 2 | 3 2 | NN for Numerator | 10 | 1.490% | 1.840% | |
| NN for Denominator | 10 | ||||||
| 3 | 2 2 1 | NN for Numerator | 10 | 0.746% | 0.962% | ||
| NN for Denominator | 10 | ||||||
| Geometrical Parameters (mm) | Training Samples (81 Samples) | Test Samples (64 Samples) | |||||
|---|---|---|---|---|---|---|---|
| Min | Max | Steps | Min | Max | Steps | ||
| Case 1 (Narrower Range) | 3.4 | 3.56 | 0.02 | 3.41 | 3.55 | 0.02 | |
| 4.3 | 4.46 | 0.02 | 4.31 | 4.45 | 0.02 | ||
| 4.0 | 4.16 | 0.02 | 4.01 | 4.15 | 0.02 | ||
| 3.2 | 3.36 | 0.02 | 3.21 | 3.35 | 0.02 | ||
| 2.9 | 3.06 | 0.02 | 2.91 | 3.05 | 0.02 | ||
| Case 2 (Wider Range) | 3.3 | 3.62 | 0.04 | 3.32 | 3.6 | 0.04 | |
| 4.2 | 4.52 | 0.04 | 4.22 | 4.5 | 0.04 | ||
| 3.9 | 4.22 | 0.04 | 3.92 | 4.2 | 0.04 | ||
| 3.1 | 3.42 | 0.04 | 3.12 | 3.4 | 0.04 | ||
| 2.8 | 3.12 | 0.04 | 2.82 | 3.1 | 0.04 | ||
| Modeling Methods | No. of Sub-Models | or | No. of Hidden Neurons | Average Training Error | Average Testing Error | ||
|---|---|---|---|---|---|---|---|
| Case 1 (Narrower Range) | Existing Rational Neuro-TF Method | 1 | 6 | NN for Numerator | 10 | 4.448% | 4.674% |
| NN for Denominator | 10 | ||||||
| 1 | 6 | NN for Numerator | 40 | 2.562% | 9.121% | ||
| NN for Denominator | 40 | ||||||
| Proposed Rational Neuro-TF Method | 2 | 3 3 | NN for Numerator | 10 | 1.487% | 1.672% | |
| NN for Denominator | 10 | ||||||
| 3 | 2 2 2 | NN for Numerator | 10 | 0.876% | 1.015% | ||
| NN for Denominator | 10 | ||||||
| Case 2 (Wider Range) | Existing Rational Neuro-TF Method | 1 | 6 | NN for Numerator | 10 | 6.809% | 8.382% |
| NN for Denominator | 10 | ||||||
| 1 | 6 | NN for Numerator | 40 | 4.791% | 32.23% | ||
| NN for Denominator | 40 | ||||||
| Proposed Rational Neuro-TF Method | 2 | 3 3 | NN for Numerator | 10 | 2.252% | 4.397% | |
| NN for Denominator | 10 | ||||||
| 2 | 3 3 | NN for Numerator | 40 | 1.877% | 16.21% | ||
| NN for Denominator | 40 | ||||||
| 3 | 2 2 2 | NN for Numerator | 10 | 1.624% | 1.982% | ||
| NN for Denominator | 10 | ||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Feng, F.; Zhang, J.; Zhang, W.; Jin, J.; Ma, J.; Zhang, Q.-J. Novel Decomposition Technique on Rational-Based Neuro-Transfer Function for Modeling of Microwave Components. Micromachines 2020, 11, 696. https://doi.org/10.3390/mi11070696
Zhao Z, Feng F, Zhang J, Zhang W, Jin J, Ma J, Zhang Q-J. Novel Decomposition Technique on Rational-Based Neuro-Transfer Function for Modeling of Microwave Components. Micromachines. 2020; 11(7):696. https://doi.org/10.3390/mi11070696
Chicago/Turabian StyleZhao, Zhihao, Feng Feng, Jianan Zhang, Wei Zhang, Jing Jin, Jianguo Ma, and Qi-Jun Zhang. 2020. "Novel Decomposition Technique on Rational-Based Neuro-Transfer Function for Modeling of Microwave Components" Micromachines 11, no. 7: 696. https://doi.org/10.3390/mi11070696