An Improved Passivity-based Control of Electrostatic MEMS Device




Abstract
:1. Introduction
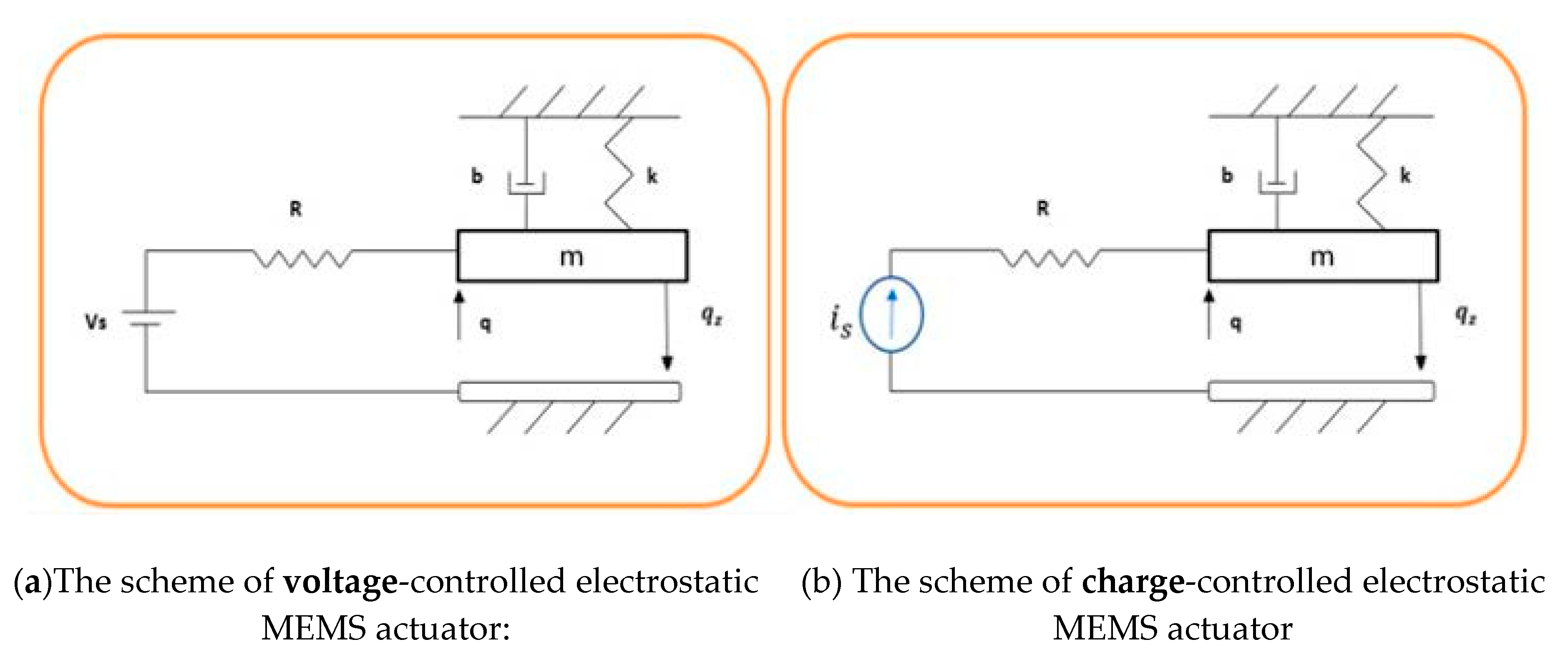
2. The Mathematical Model of the Electrostatic MEMS Actuator
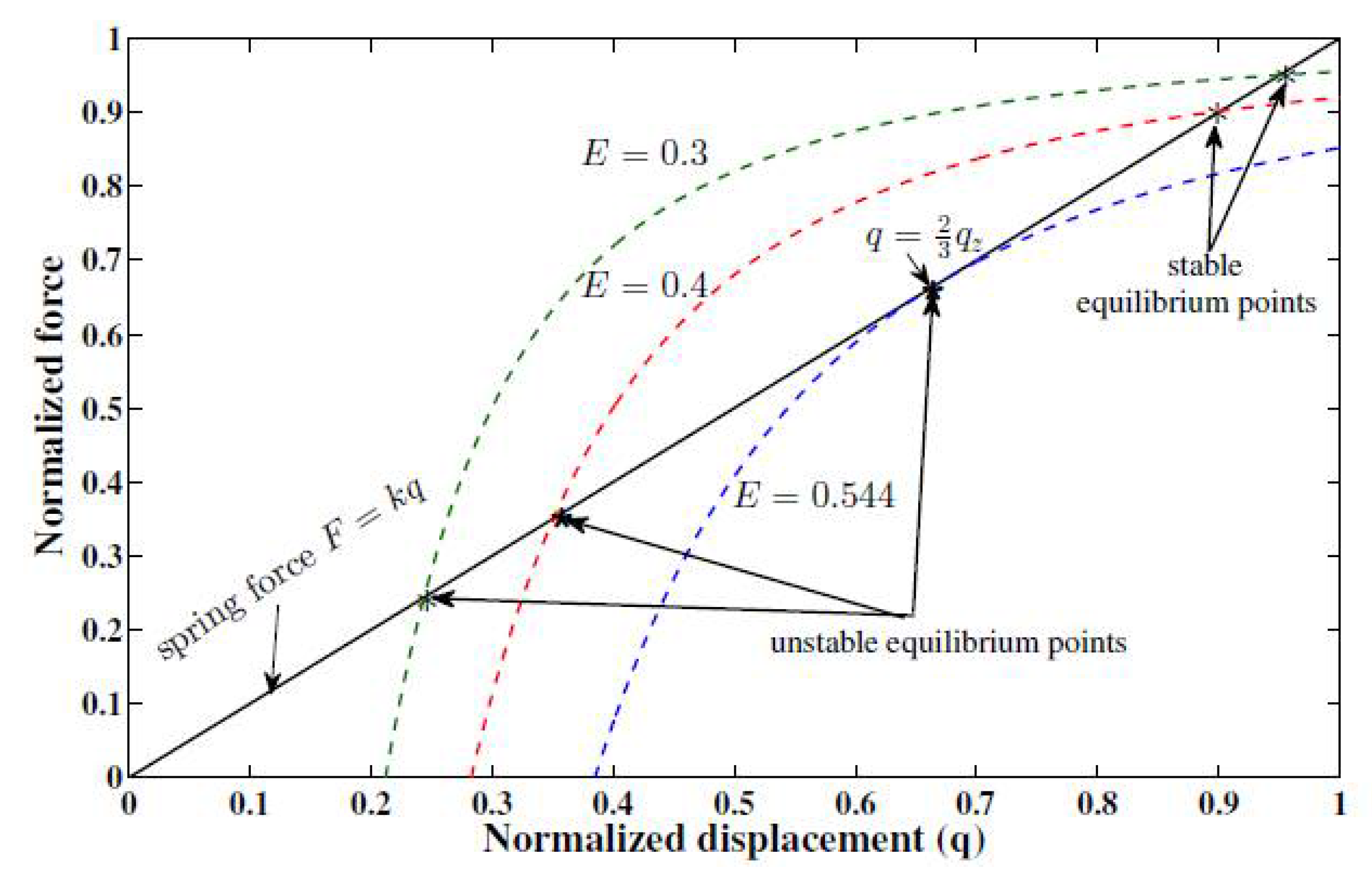
3. The Pull-in Stability Analysis of the System
4. Design of the Controller and the Observer for the MEMS Actuator
4.1. The Port-Hamiltonian Model of the System
4.2. The Controller Design Based on IDA-PBC Method
4.3. The Design of the Speed Observer
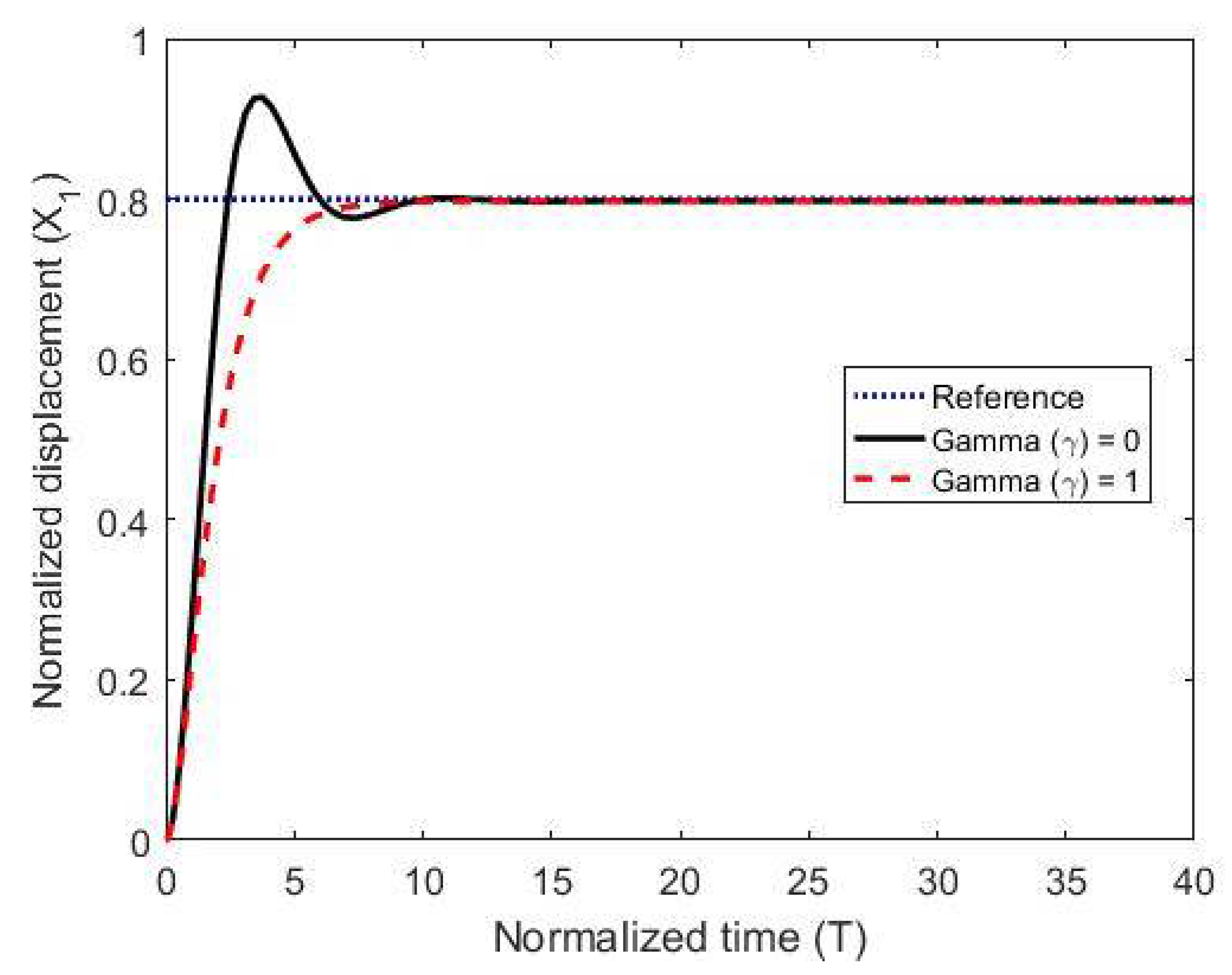
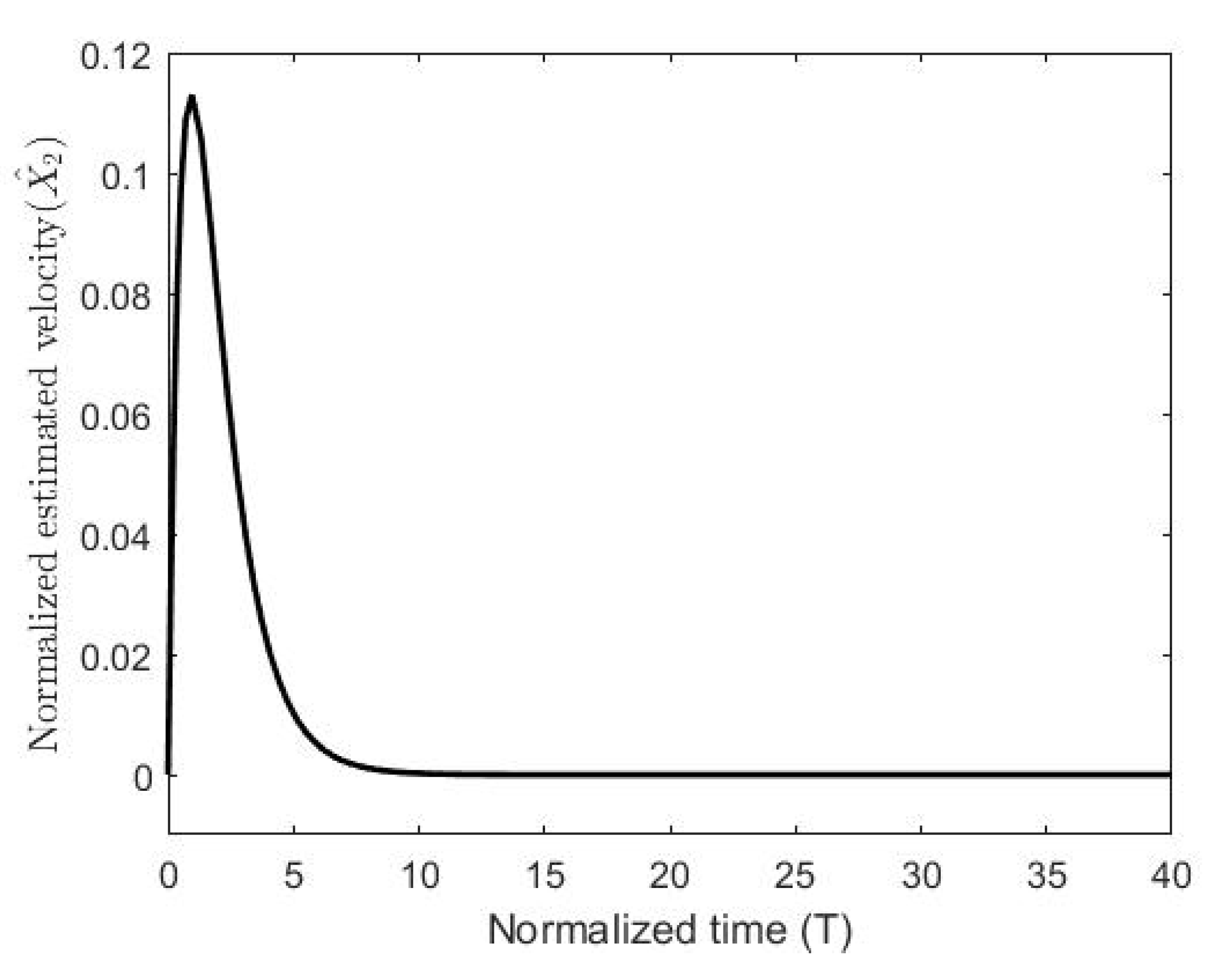
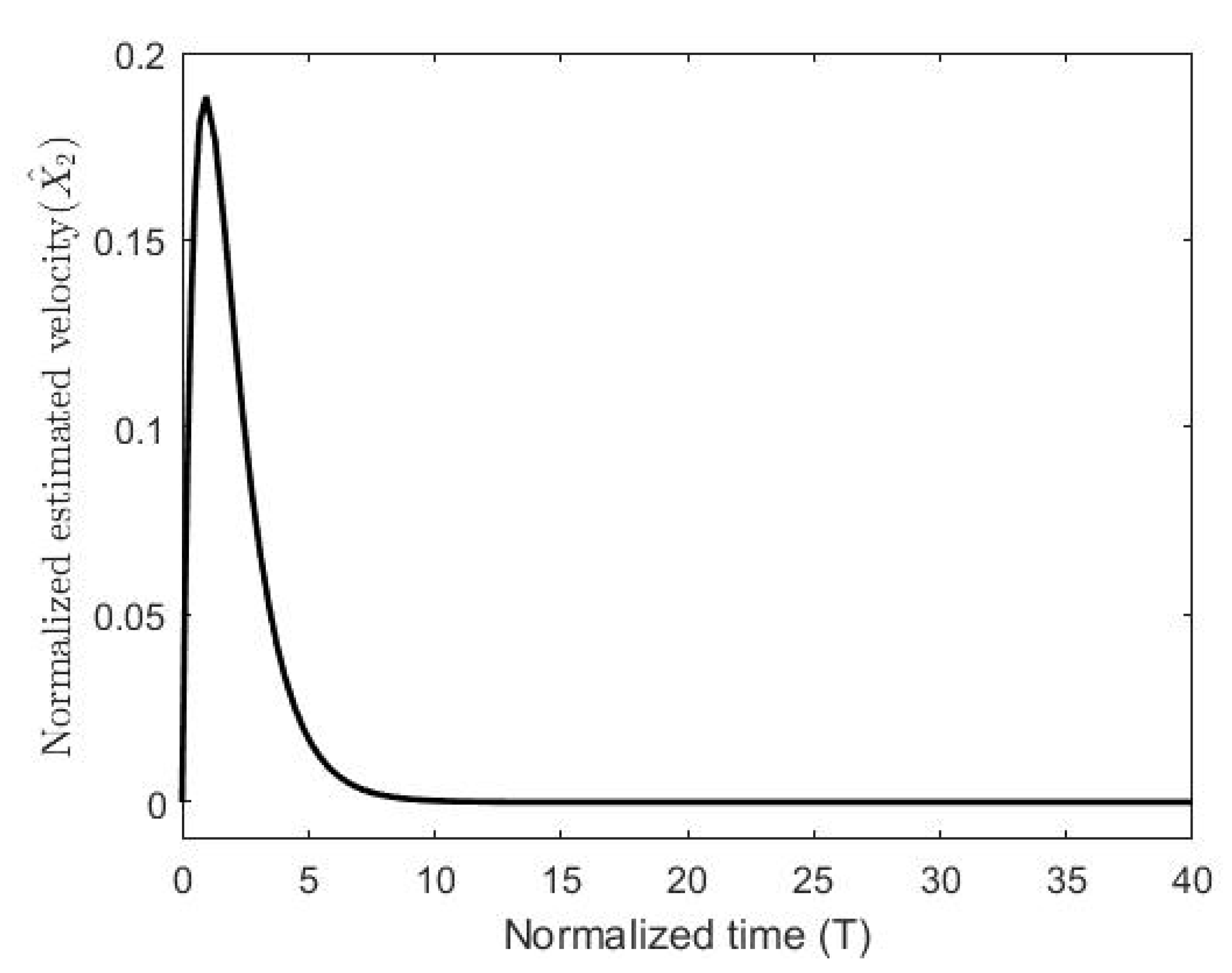
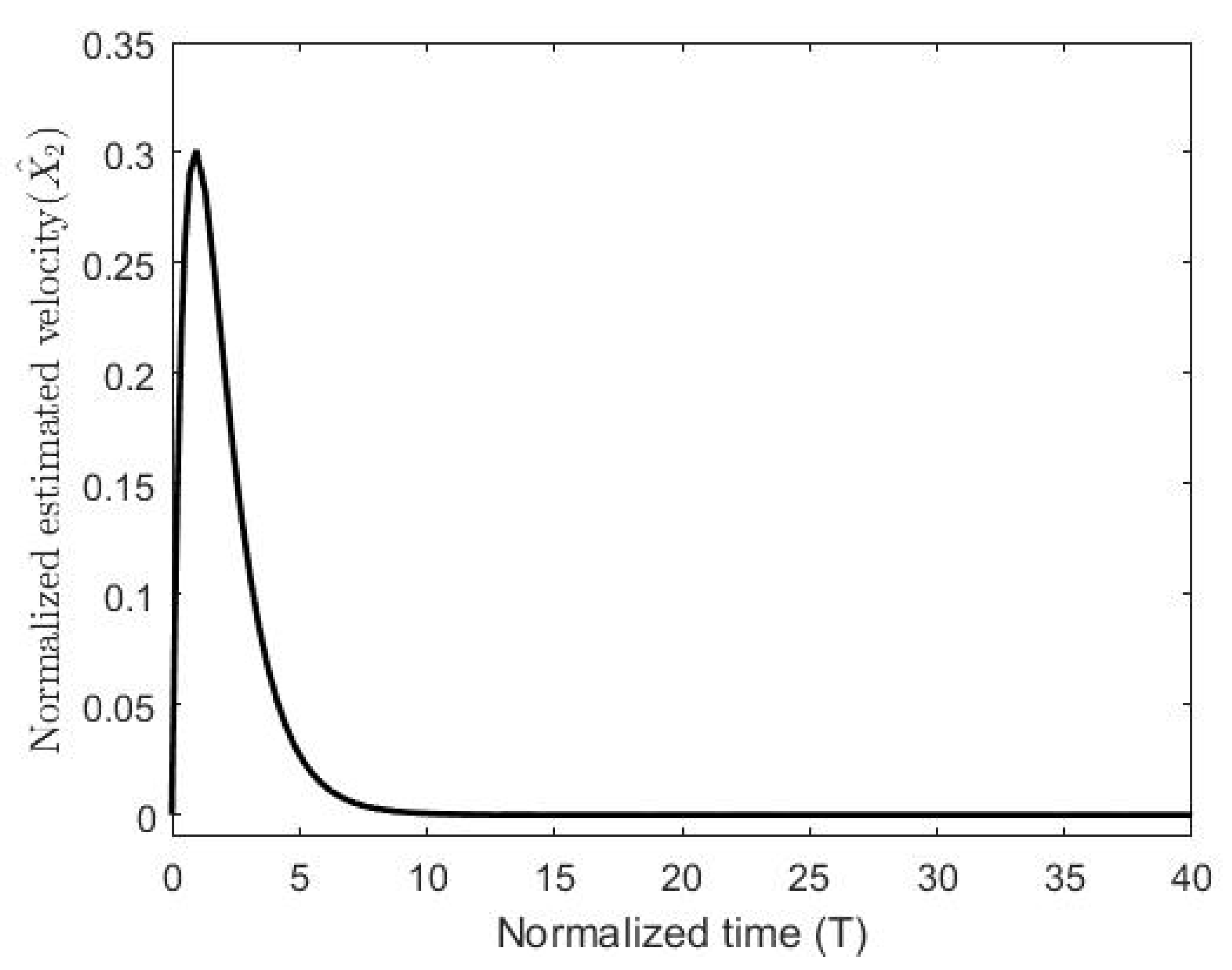
5. Numerical Simulations
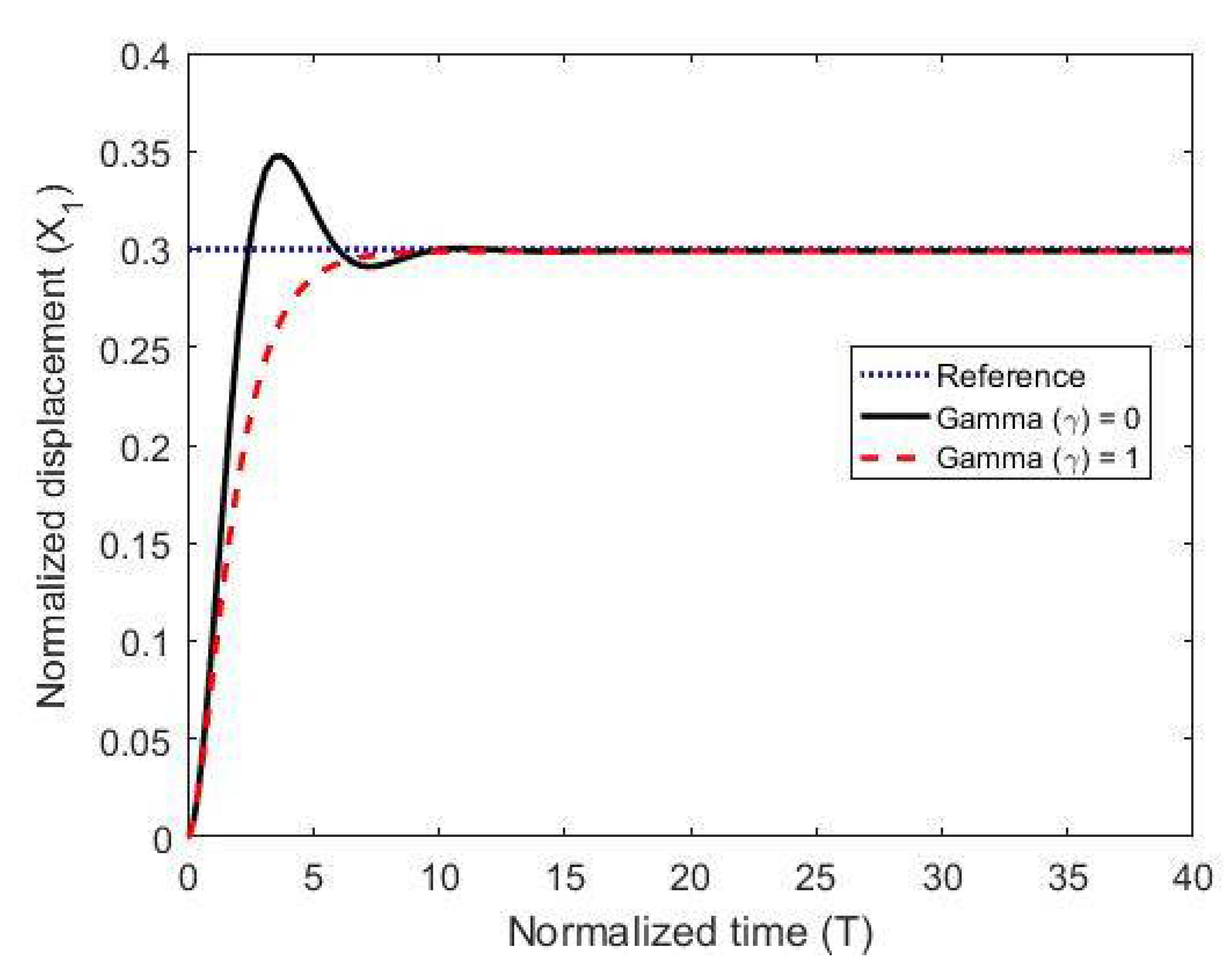
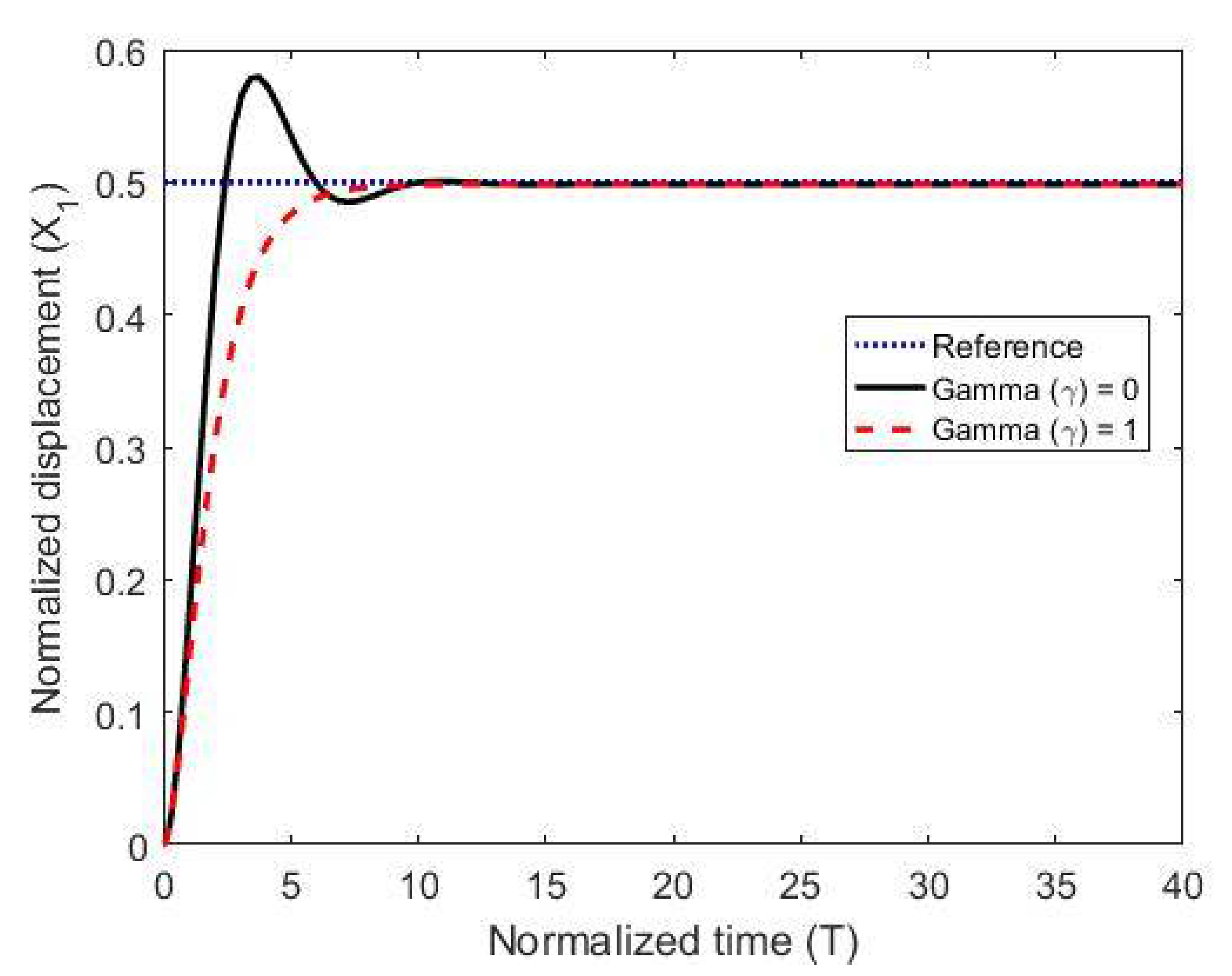
5.1. Simulations Using MATLAB/Simulink environment
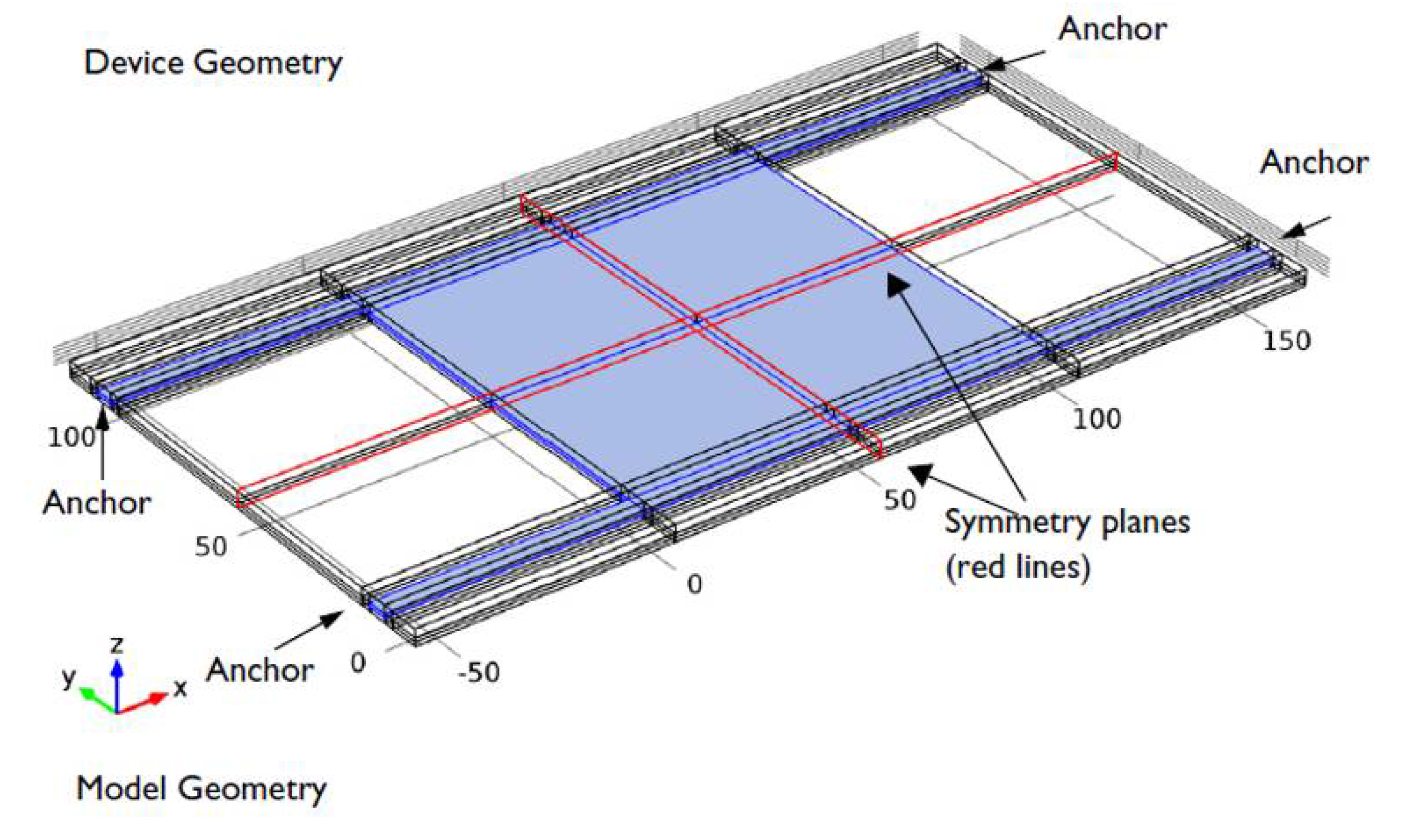
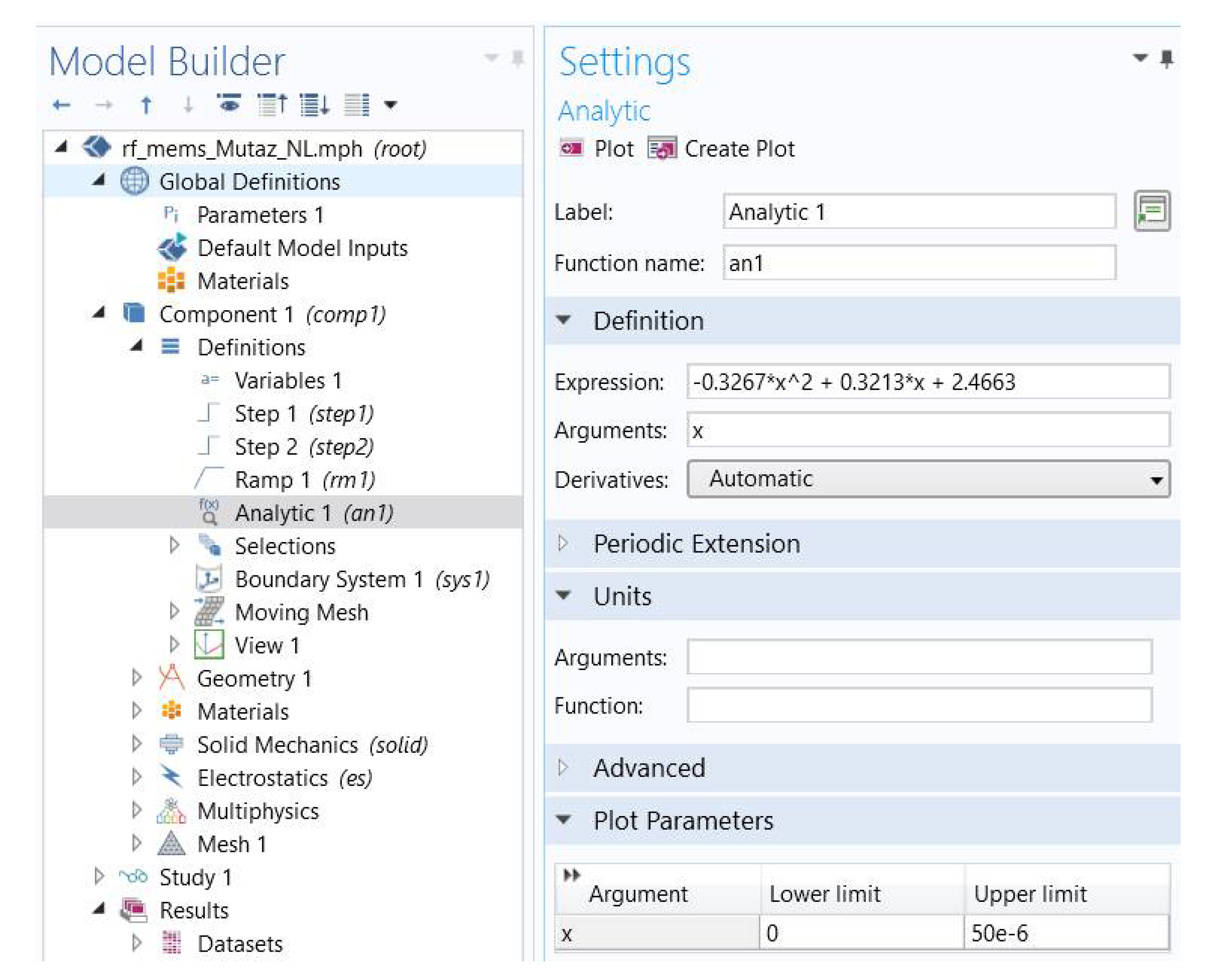
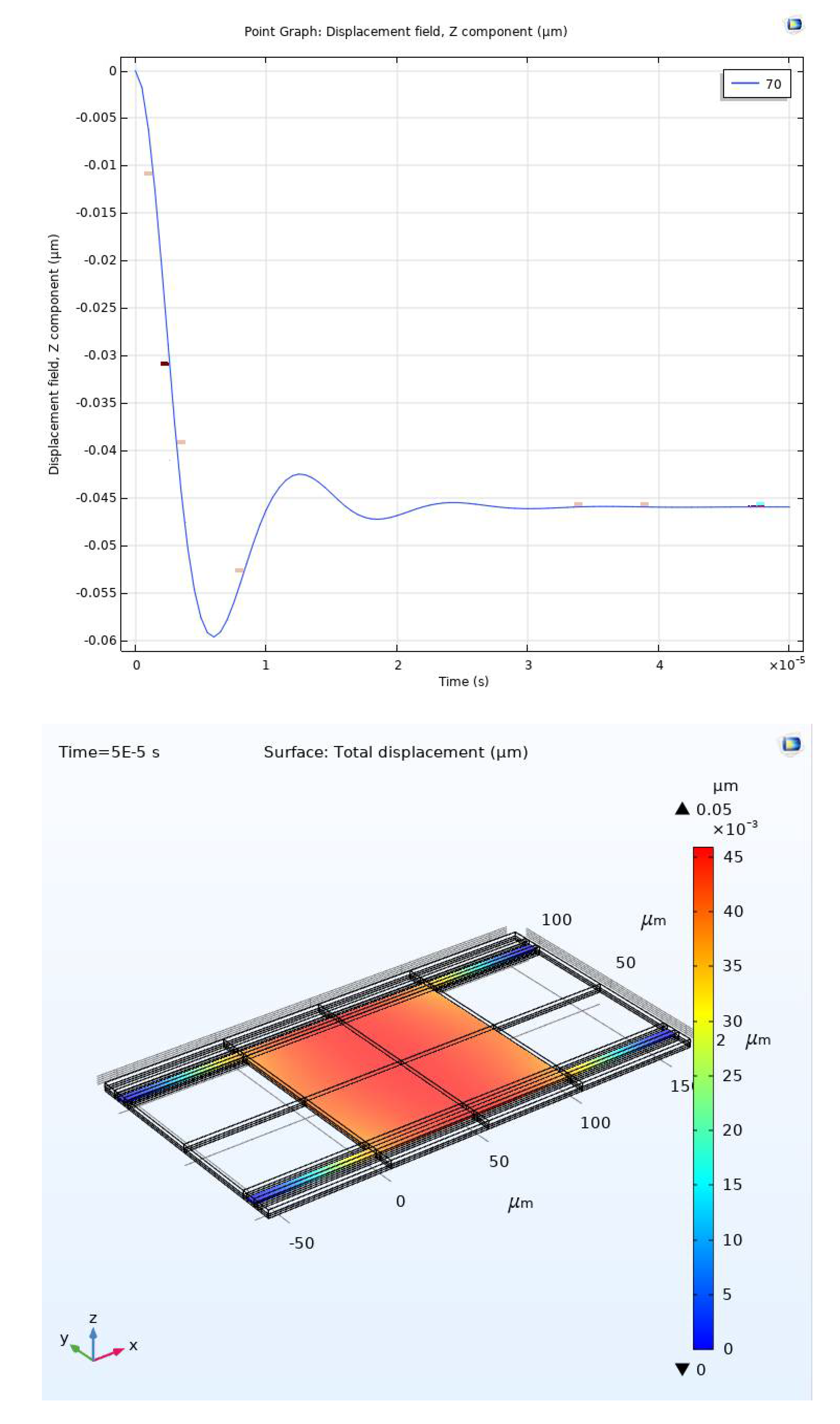
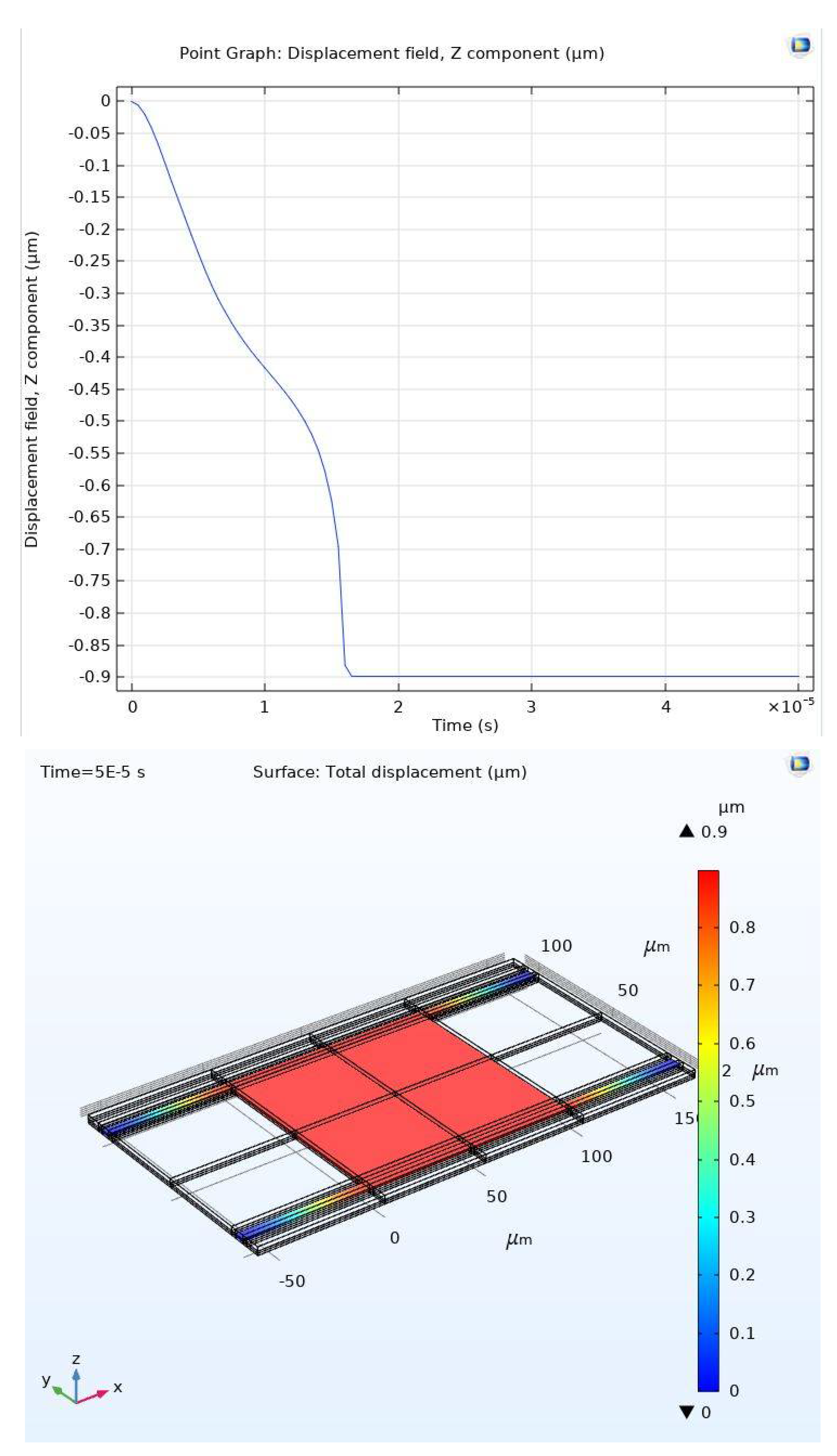
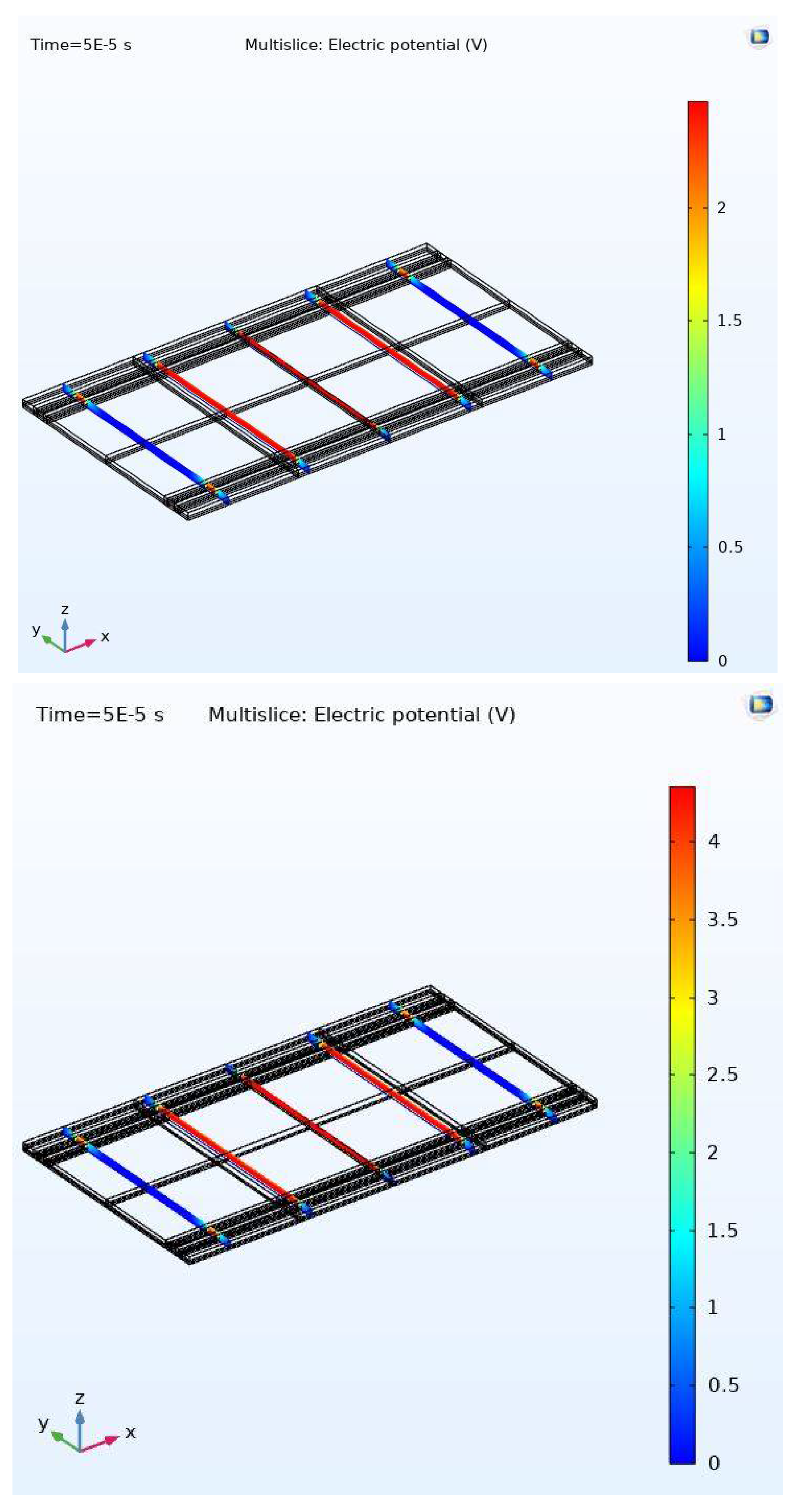
5.2. Simulations Using Multiphysics Modelling Software COMSOL
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, W.-M.; Yan, H.; Peng, Z.-K.; Meng, G. Electrostatic pull-in instability in MEMS/NEMS: A review. Sens. Actuators A Phys. 2014, 214, 187–218. [Google Scholar] [CrossRef]
- Agudelo, C.G.; Packirisamy, M.; Zhu, G.; Saydy, L. Nonlinear Control of an Electrostatic Micromirror Beyond Pull-In with Experimental Validation. J. Microelectromech. Syst. 2009, 18, 914–923. [Google Scholar] [CrossRef]
- Oh, K.W.; Ahn, C.H. A review of microvalves. J. Micromech. Microeng. 2006, 16, 13–39. [Google Scholar] [CrossRef]
- Uhlig, S.; Gaudet, M.; Langa, S.; Schimmanz, K.; Conrad, H.; Kaiser, B.; Schenk, H. Electrostatically Driven In-Plane Silicon Micropump for Modular Configuration. Micromachines 2018, 9, 190. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Maithripala, D.H.S.; Berg, J.M.; Dayawansa, W.P. Control of an Electrostatic Microelectromechanical System Using Static and Dynamic Output Feedback. J. Dyn. Syst. Meas. Control 2005, 127, 443–450. [Google Scholar] [CrossRef]
- Dong, L.; Edwards, J. Active Disturbance Rejection Control for an Electro-Statically Acuated MEMS Device. Int. J. Intell. Control Syst. 2011, 16, 160–169. [Google Scholar]
- Karkoub, M.; Zribi, M. Robust Control of an Electrostatic Microelectromechanical Actuator. Open Mech. J. 2008, 2, 12–20. [Google Scholar] [CrossRef]
- Zhu, G.; Levine, J.; Praly, L. Stabilization of an electrostatic MEMS including uncontrollable linearization. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2433–2438. [Google Scholar]
- Salah, M.H.; Alwidyan, K.M.; Tatlicioglu, E.; Dawson, D. Robust Backstepping Nonlinear Control for Parallel-Plate Micro Electrostatic Actuators. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010. [Google Scholar]
- Zhu, G.; Lévine, J.; Praly, L. Improving the performance of an electrostatically actuated MEMS by nonlinear control: Some advances and comparisons. In Proceedings of the 44th IEEE CDC ECC, Seville, Spain, 12–15 December 2005; pp. 7534–7539. [Google Scholar]
- Wickramasinghe, I.P.M.; Maithripala DH, S.; Kawade, B.D.; Berg, J.M.; Dayawansa, W.P. Passivity-Based Stabilization of a 1-DOF Electrostatic MEMS Model With a Parasitic Capacitance. IEEE Trans. Control Syst. Technol. 2009, 17, 249–256. [Google Scholar] [CrossRef]
- Dong, X.; Yang, S.; Zhu, J.; En, Y.; Huang, Y. Method of Measuring the Mismatch of Parasitic 0ance in MEMS Accelerometer Based on Regulating Electrostatic Stiffness. Micromachines 2018, 9, 128. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Iqbal, F.; Lee, B. A Study on Measurement Variations in Resonant Characteristics of Electrostatically Actuated MEMS Resonators. Micromachines 2018, 9, 173. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feng, J.; Liu Ch Zhang, W.; Hao, S. Static and Dynamic Mechanical Behaviors of Electrostatic MEMS Resonator with Surface Processing Error. Micromachines 2018, 9, 34. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Newton, B. Design of Curved Electrodes to Enable Large Stroke—Low Voltage Micro Actuators. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. [Google Scholar]
- Preetham, B.S.; Hoelzle, D.J. Experimental investigation of curved electrode actuator dynamics in viscous dielectric media. Appl. Phys. Lett. 2018, 113, 074102. [Google Scholar]
- Preetham, B.S.; Lake, M.A.; Hoelzle, D.J. A curved electrode electrostatic actuator designed for large displacement and force in an underwater environment. J. Micromech. Microeng. 2017, 27, 095009. [Google Scholar] [CrossRef]
- Petrov, D.; Lang, W.; Benecke, W. A nickel electrostatic curved beam actuator for valve applications. Procedia Eng. 2010, 5, 1409–1412. [Google Scholar] [CrossRef] [Green Version]
- Ortega, R.; van der Schaft, A.J.; Maschke, B.; Escobar, G. Interconnection and damping assignment passivity-based control of port-controlled Hamiltonian systems. Automatica 2002, 38, 585–596. [Google Scholar] [CrossRef] [Green Version]
- Yuksel, B.; Secchi, C.; Bülthoff, H.; Hand Franchi, A. Reshaping the physical properties of a quadrotor through IDA-PBC and its application to aerial physical interaction. In Proceedings of the 2014 IEEE Int. Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 6258–6265. [Google Scholar]
- Ryalat, M. Design and Implementation of Nonlinear and Robust Control for Hamiltonian Systems: The Passivity-Based Control Approach. Ph.D. Thesis, University of Southampton, Southampton, UK, 2015. [Google Scholar]
- Gaviria, C.; Fossas, E.; Griñó, R. Robust Controller for a Full-Bridge Rectifier Using the IDA Approach and GSSA Modeling. IEEE Trans. Circuits Syst. 2005, 52, 609–616. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Tenorio, C.; Quijano, N.; Mojica-Nava, E.; Sofrony, J. Bond Graph Model-Based for IDA-PBC. In Proceedings of the 2016 IEEE Conference on Control Applications (CCA) Part of 2016 IEEE Multi-Conference on Systems and Control, Buenos Aires, Argentina, 19–22 September 2016; pp. 1098–1103. [Google Scholar]
- Ryalat, M.; Laila, D.S.; Almtireen, N.; ElMoaqet, H. A Novel Dynamic IDA-PBC Controller for Electrostatic MEMS Devices. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 2952–2957. [Google Scholar]
- Ryalat, M.; Laila, D.; ElMoaqet, H.; Almtireen, N. Dynamic IDA-PBC Control for Weakly-Coupled Electromechanical Systems. Automatica 2020, 115, 108880. [Google Scholar] [CrossRef]
- Crespo, M.; Donaire, A.; Ruggiero, F.; Lippiello, V.; Siciliano, B. Design, Implementation and Experiments of A Robust Passivity-Based Controller for A Rolling-Balancing System. In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics, Lisbon, Portugal, 29–31 July 2016; pp. 79–89. [Google Scholar]
- Donaire, A.; Junco, S. On the addition of integral action to port-controlled Hamiltonian systems. Automatica 2009, 45, 1910–1916. [Google Scholar] [CrossRef]
- Nemirovsky, Y.; Bochobza-Degani, O. A methodology and model for the pull-in parameters of electrostatic actuators. J. Microelectromech. Syst. 2001, 10, 601–615. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, H.; Ortega, R. Stabilization of electromechanical systems via interconnection and damping assignment. Int. J. Robust Nonlinear Control 2003, 13, 1095–1111. [Google Scholar] [CrossRef]
- Maithripala DH, S.; Berg, J.M.; Dayawansa, W.P. Capacitive stabilization of an electrostatic actuator: Output feedback viewpoint. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; pp. 4053–4058. [Google Scholar]
- Senturia, S. Microsystem Design; Kluwer: Norwell, MA, USA, 2001. [Google Scholar]
- Khalil, H. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Van der Schaft, A.J. L2-Gain and Passivity Techniques in Nonlinear Control; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- COMSOL: Application Gallery, “Pull-In of an RF MEMS Switch”. Available online: https://www.comsol.com/model/pull-in-of-an-rf-mems-switch-16379 (accessed on 11 July 2020).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Plate length | L = 50 μm |
| Plate thickness | t = 2 μm |
| Gap between the plates | |
| Permittivity | |
| Density | |
| Damping ratio | ζ = 1 × |
| Spring stiffness | k = 128 N/m |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ryalat, M.; Salim Damiri, H.; ElMoaqet, H.; AlRabadi, I. An Improved Passivity-based Control of Electrostatic MEMS Device. Micromachines 2020, 11, 688. https://doi.org/10.3390/mi11070688
Ryalat M, Salim Damiri H, ElMoaqet H, AlRabadi I. An Improved Passivity-based Control of Electrostatic MEMS Device. Micromachines. 2020; 11(7):688. https://doi.org/10.3390/mi11070688
Chicago/Turabian StyleRyalat, Mutaz, Hazem Salim Damiri, Hisham ElMoaqet, and Imad AlRabadi. 2020. "An Improved Passivity-based Control of Electrostatic MEMS Device" Micromachines 11, no. 7: 688. https://doi.org/10.3390/mi11070688