Frequency Response of Induced-Charge Electrophoretic Metallic Janus Particles

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
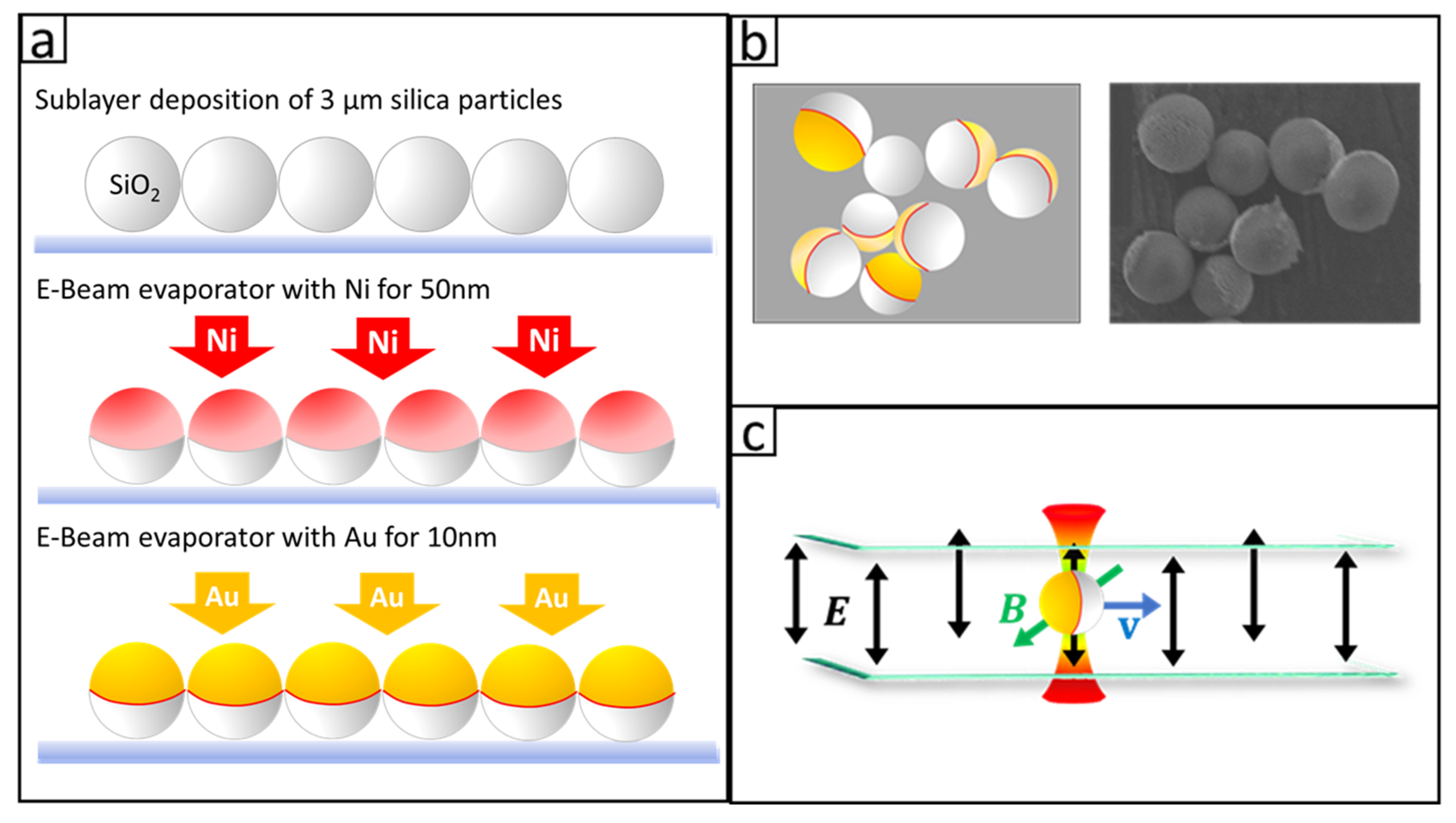
2.1. Fabrication of Metal-Dielectric Janus Particles
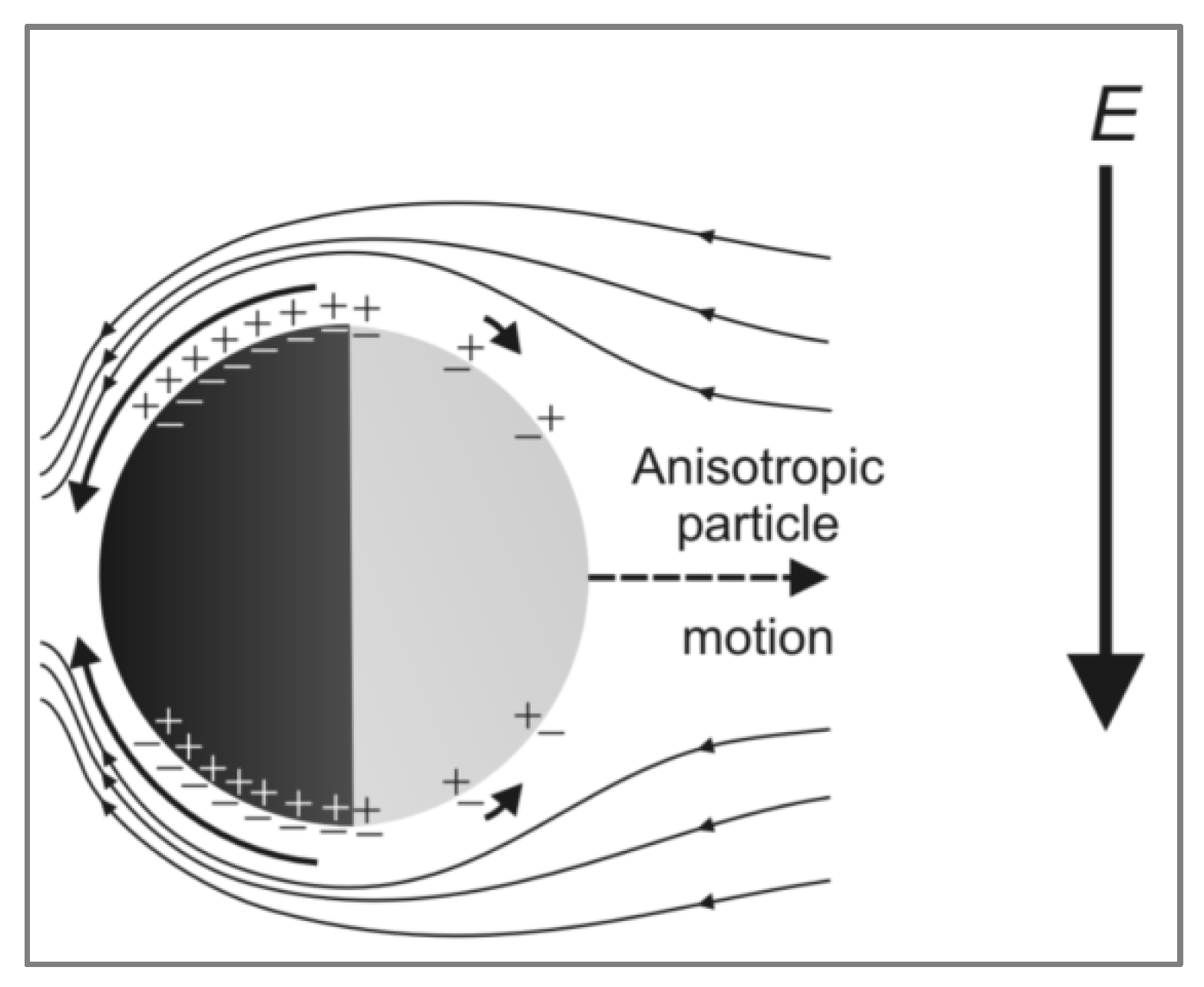
2.2. Application of AC Electric Field to Drive Janus Particles Based on ICEP
2.3. Application of a Magnetic Field to Fix the Direction of the ICEP Driven Phoretic Motion
2.4. Position Detection of Phoretic Particles in 2D Using Image Analysis
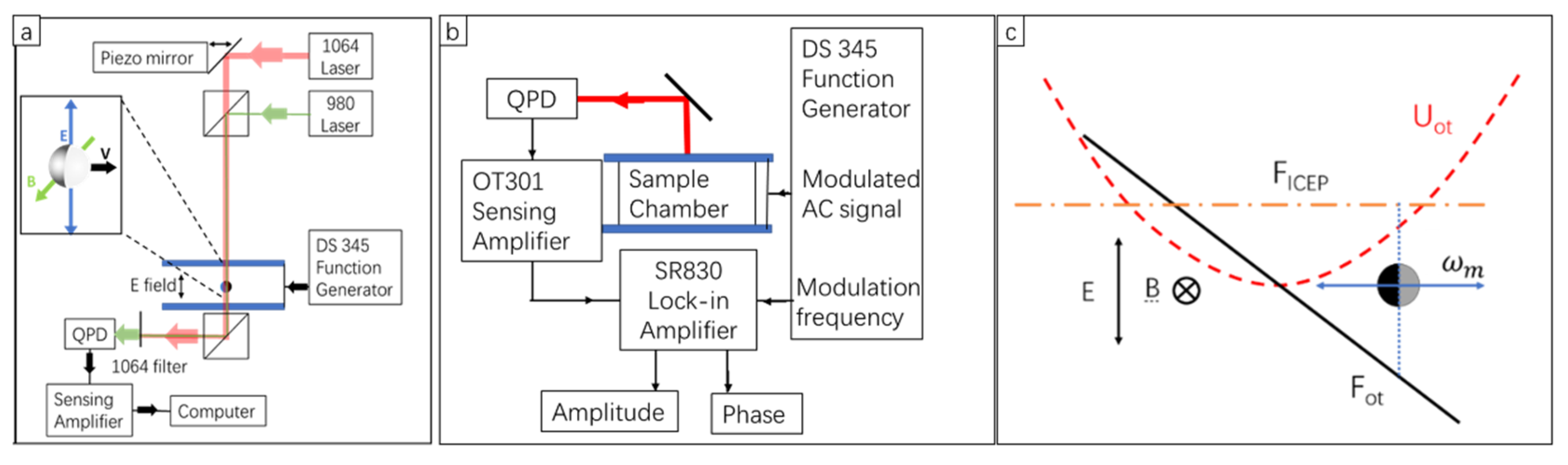
2.5. Trapping and Manipulation of a Janus Particle
2.6. Phoretic Force Spectroscopy
2.7. Stokes’ Drag Coefficient of the Particle near the Bottom of the ITO Glass Chamber
3. Results and Discussions
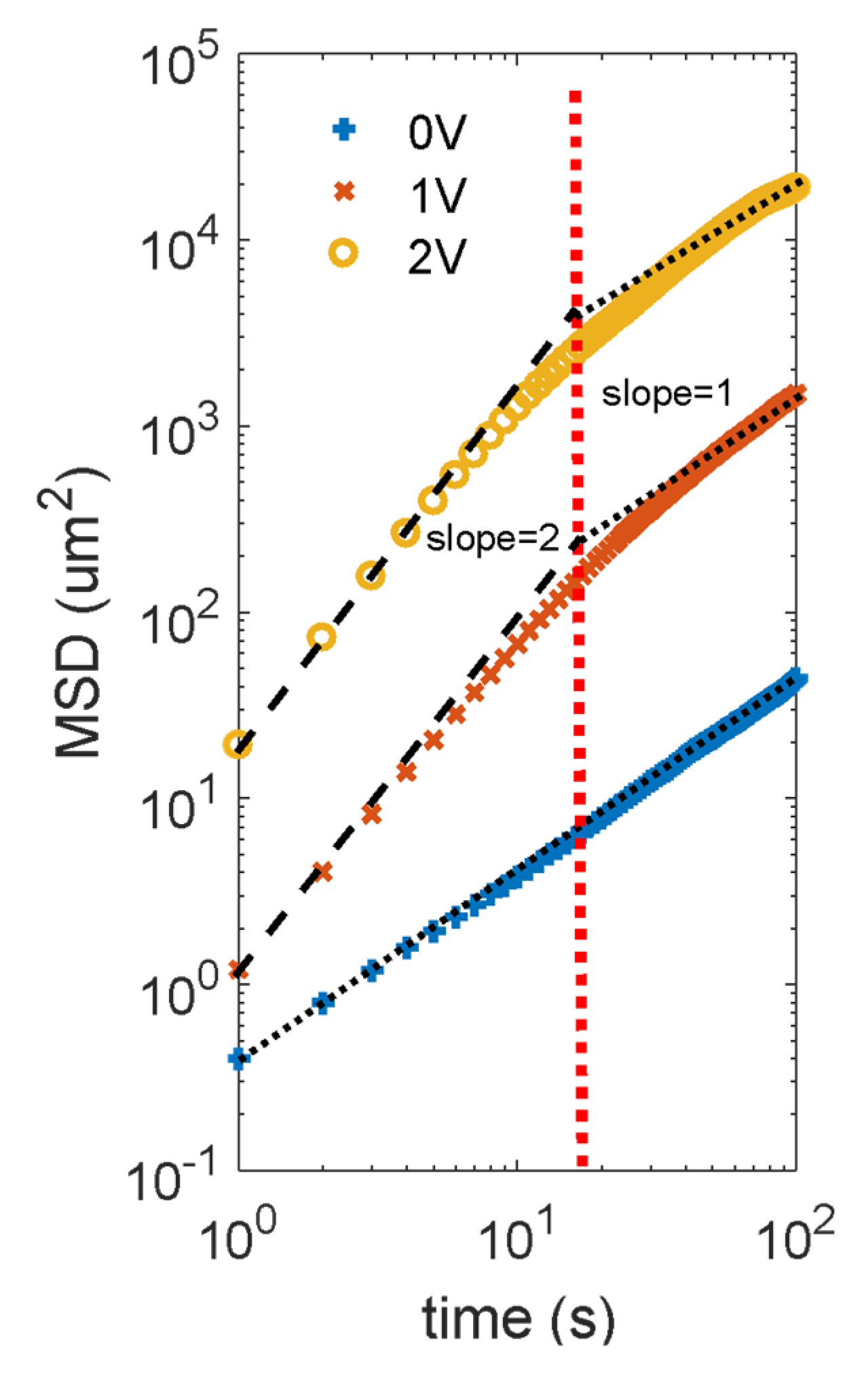
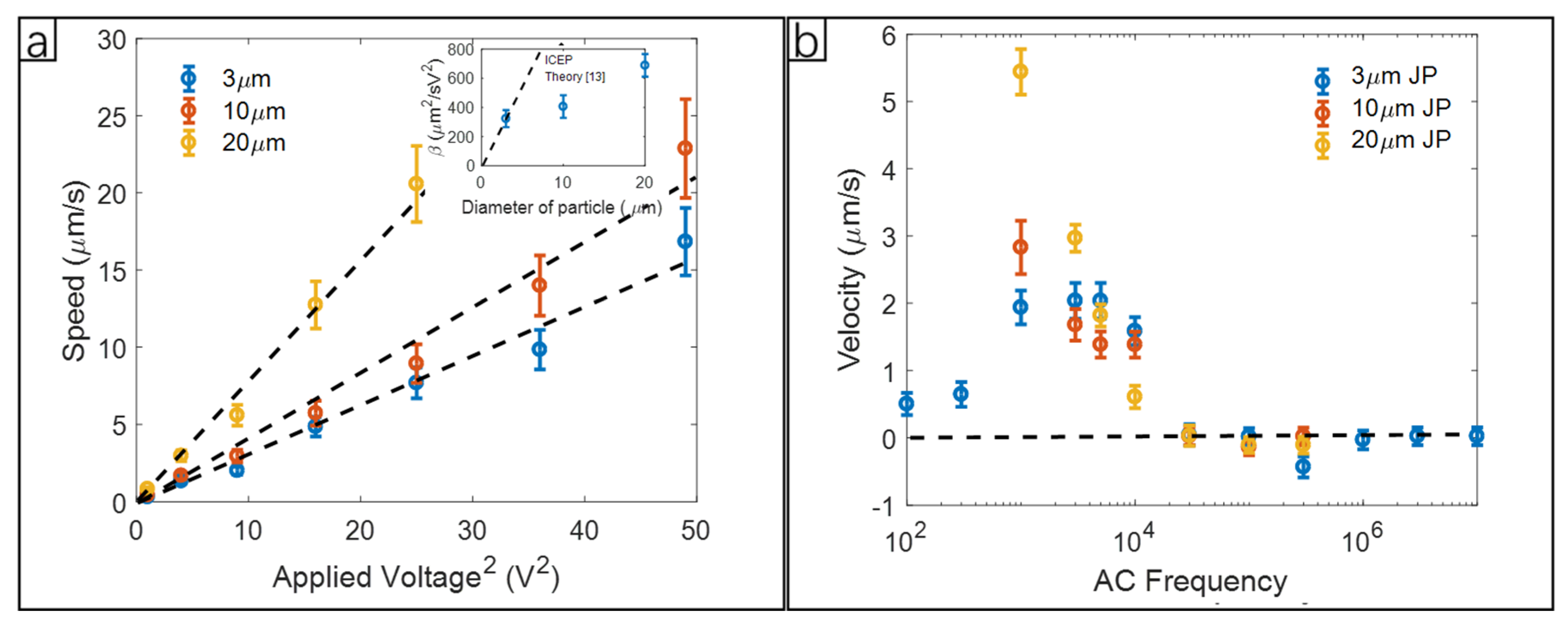
3.1. ICEP Movement of an Unconfined Janus Particle in 2D
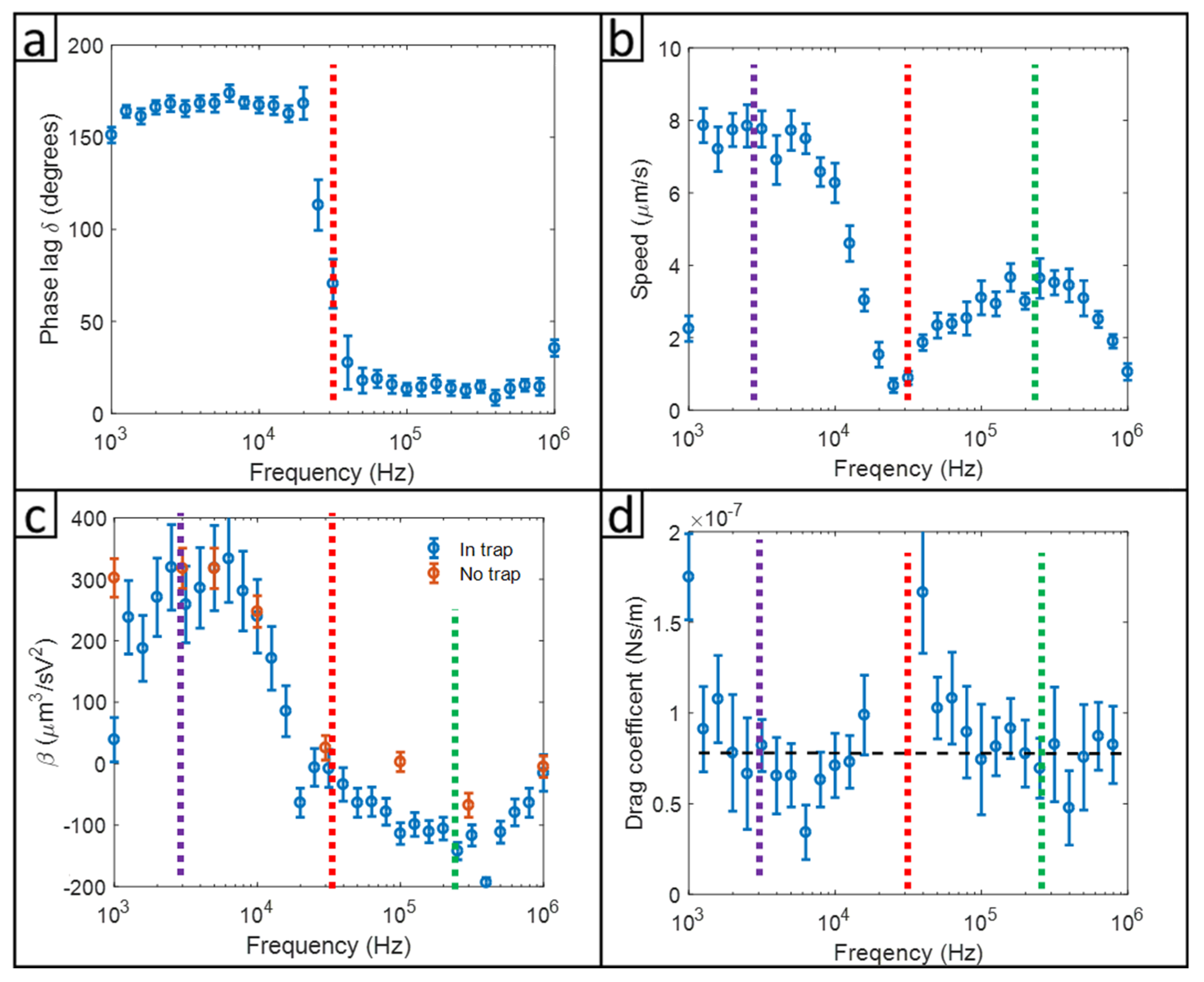
3.2. ICEP Movements in 1D of a Phoretic Particle Confined in a Quadratic Potential
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Choi, J.; Zhao, Y.; Zhang, D.; Chien, S.; Lo, Y.H. Patterned Fluorescent Particles as Nanoprobes for the Investigation of Molecular Interactions. Nano Lett. 2003, 3, 995–1000. [Google Scholar] [CrossRef]
- Yang, Y.; Bevan, M.A. Optimal Navigation of Self-Propelled Colloids. ACS Nano 2018, 12, 10712–10724. [Google Scholar] [CrossRef]
- Solovev, A.A.; Sanchez, S.; Pumera, M.; Mei, Y.F.; Schmidt, O.C. Magnetic Control of Tubular Catalytic Microbots for the Transport, Assembly, and Delivery of Micro-Objects. Adv. Funct. Mater. 2010, 20, 2430–2435. [Google Scholar] [CrossRef]
- Walther, A.; Müller, A.H.E. Janus Particles: Synthesis, Self-Assembly, Physical Properties, and Applications. Chem. Rev. 2013, 113, 5194–5261. [Google Scholar] [CrossRef] [PubMed]
- Bogue, R. The Development of Medical Microrobots: A Review of Progress. Ind. Rob. 2008, 35, 294–299. [Google Scholar] [CrossRef]
- Shields, C.W.; Velev, O.D. The Evolution of Active Particles: Toward Externally Powered Self-Propelling and Self-Reconfiguring Particle Systems. Chem 2017, 3, 539–559. [Google Scholar] [CrossRef] [Green Version]
- Boymelgreen, A.M.; Balli, T.; Miloh, T.; Yossifon, G. Active Colloids as Mobile Microelectrodes for Unified Label-Free Selective Cargo Transport. Nat. Commun. 2018, 9, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Ebbens, S.J. Active Colloids: Progress and Challenges towards Realising Autonomous Applications. Curr. Opin. Colloid Interface Sci. 2016, 21, 14–23. [Google Scholar] [CrossRef] [Green Version]
- Jiang, H.R.; Yoshinaga, N.; Sano, M. Active Motion of a Janus Particle by Self-Thermophoresis in a Defocused Laser Beam. Phys. Rev. Lett. 2010, 105, 268302. [Google Scholar] [CrossRef]
- Uspal, W.E.; Popescu, M.N.; Dietrich, S.; Tasinkevych, M. Self-Propulsion of a Catalytically Active Particle near a Planar Wall: From Reflection to Sliding and Hovering. Soft Matter 2015, 11, 434–438. [Google Scholar] [CrossRef] [Green Version]
- Kilic, M.S.; Bazant, M.Z. Induced-Charge Electrophoresis near a Wall. Electrophoresis 2011, 32, 614–628. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanchez, S.; Solovev, A.A.; Harazim, S.M.; Schmidt, O.G. Microbots Swimming in the Flowing Streams of Microfluidic Channels. J. Am. Chem. Soc. 2011, 133, 701–703. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zhu, Y. Directed Assembly of Janus Particles under High Frequency Ac-Electric Fields: Effects of Medium Conductivity and Colloidal Surface Chemistry. Langmuir 2012, 28, 13201–13207. [Google Scholar] [CrossRef] [PubMed]
- Gangwal, S.; Cayre, O.J.; Bazant, M.Z.; Velev, O.D. Induced-Charge Electrophoresis of Metallodielectric Particles. Phys. Rev. Lett. 2008, 100, 058302. [Google Scholar] [CrossRef] [Green Version]
- Squires, T.M.; Bazant, M.Z. Breaking Symmetries in Induced-Charge Electro-Osmosis and Electrophoresis. J. Fluid Mech. 2006, 560, 65–101. [Google Scholar] [CrossRef] [Green Version]
- Mano, T.; Delfau, J.B.; Iwasawa, J.; Sano, M. Optimal Run-And-Tumble-Based Transportation of a Janus Particle with Active Steering. Proc. Natl. Acad. Sci. USA 2017, 114, E2580–E2589. [Google Scholar] [CrossRef] [Green Version]
- Storey, B.D.; Edwards, L.R.; Kilic, M.S.; Bazant, M.Z. Steric Effects on Ac Electro-Osmosis in Dilute Electrolytes. Phys. Rev. E 2008, 77, 036317. [Google Scholar] [CrossRef] [Green Version]
- Bazant, M.Z.; Kilic, M.S.; Storey, B.D.; Ajdari, A. Towards an Understanding of Induced-Charge Electrokinetics at Large Applied Voltages in Concentrated Solutions. Adv. Colloid Interface Sci. 2009, 152, 48–88. [Google Scholar] [CrossRef] [Green Version]
- Ng, W.Y.; Lam, Y.C.; Rodríguez, I. Experimental Verification of Faradaic Charging in Ac Electrokinetics. Biomicrofluidics 2009, 3, 022405. [Google Scholar] [CrossRef] [Green Version]
- González, A.; Ramos, A.; García-Sánchez, P.; Castellanos, A. Effect of the Combined Action of Faradaic Currents and Mobility Differences in Ac Electro-Osmosis. Phys. Rev. E. 2010, 81, 016320. [Google Scholar] [CrossRef]
- Ramos, A.; Morgan, H.; Green, N.G.; González, A.; Castellanos, A. Pumping of Liquids with Traveling-Wave Electroosmosis. J. Appl. Phys. 2005, 97, 084906. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Jiang, H.; Shang, D.; Ramos, A.; Garcia-Sanchez, P. Experiments on Traveling-Wave Electroosmosis: Efect of Electrolyte Conductivity. IEEE Trans. Dielectr. Electr. Insul. 2009, 16, 417–423. [Google Scholar] [CrossRef]
- Wei, M.T.; Junio, J.; Ou-Yang, D.H. Direct Measurements of the Frequency-Dependent Dielectrophoresis Force. Biomicrofluidics 2009, 3, 012003. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liao, M.-J.; Wei, M.-T.; Xu, S.-X.; Daniel Ou-Yang, H.; Sheng, P. Chinese Physics B Non-Stokes Drag Coefficient in Single-Particle Electrophoresis: New Insights on a Classical Problem. Chin. Phys. B 2019, 28, 084701. [Google Scholar] [CrossRef] [Green Version]
- Park, H.; Wei, M.T.; Ou-Yang, H.D. Dielectrophoresis Force Spectroscopy for Colloidal Clusters. Electrophoresis 2012, 33, 2491–2497. [Google Scholar] [CrossRef] [PubMed]
- Muangnapoh, T.; Weldon, A.L.; Gilchrist, J.F. Enhanced Colloidal Monolayer Assembly via Vibration-Assisted Convective Deposition. Appl. Phys. Lett. 2013, 103, 181603. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.H.; Chen, Y.L.; Jiang, H.R. Orientation-Dependent Induced-Charge Electrophoresis of Magnetic Metal-Coated Janus Particles with Different Coating Thicknesses. RSC Adv. 2017, 7, 46118–46123. [Google Scholar] [CrossRef] [Green Version]
- Han, M.; Yan, J.; Granick, S.; Luijten, E. Effective Temperature Concept Evaluated in an Active Colloid Mixture. Proc. Natl. Acad. Sci. USA 2017, 114, 7513–7518. [Google Scholar] [CrossRef] [Green Version]
- Sbalzarini, I.F.; Koumoutsakos, P. Feature Point Tracking and Trajectory Analysis for Video Imaging in Cell Biology. J. Struct. Biol. 2005, 151, 182–195. [Google Scholar] [CrossRef]
- Shen, C.; Ou-Yang, H.-C.D. The Far-from- Equilibrium Fluctuation of an Active Brownian Particle in an Optical Trap. In Optical Trapping and Optical Micromanipulation XVI, Proceedings of the SPIE Nanoscience + Engineering, San Diego, CA, USA, 11–15 August 2019; Dholakia, K., Spalding, G.C., Eds.; SPIE: Bellingham, WA, USA, 2019; Volume 11083, p. 63. [Google Scholar] [CrossRef]
- Valentine, M.T.; Dewalt, L.E.; Ou-Yang, H.D. Forces on a Colloidal Particle in a Polymer Solution: A Study Using Optical Tweezers. J. Phys. Condens. Matter 1996, 8, 9477–9482. [Google Scholar] [CrossRef]
- Wang, J.; Wei, M.T.; Cohen, J.A.; Ou-Yang, H.D. Mapping Alternating Current Electroosmotic Flow at the Dielectrophoresis Crossover Frequency of a Colloidal Probe. Electrophoresis 2013, 34, 1915–1921. [Google Scholar] [CrossRef] [PubMed]
- Zia, R.N. Active and Passive Microrheology: Theory and Simulation. Annu. Rev. Fluid Mech. 2018, 50, 371–405. [Google Scholar] [CrossRef]
- Ha, C.; Ou-Yang, H.D.; Pak, H.K. Direct Measurements of Colloidal Hydrodynamics near Flat Boundaries Using Oscillating Optical Tweezers. Phys. A Stat. Mech. Appl. 2013, 392, 3497–3504. [Google Scholar] [CrossRef]
- BUTLER, J.A.V. Theory of the Stability of Lyophobic Colloids. Nature 1948, 162, 315–316. [Google Scholar] [CrossRef]
- Behrens, S.H.; Plewa, J.; Grier, D.G. Measuring a Colloidal Particle’s Interaction with a Flat Surface under Nonequilibrium Conditions Total Internal Reflection Microscopy with Absolute Position Information. Eur. Phys. J. E 2003, 10, 115–121. [Google Scholar] [CrossRef]
- Kline, T.R.; Chen, G.; Walker, S.L. Colloidal Deposition on Remotely Controlled Charged Micropatterned Surfaces in a Parallel-Plate Flow Chamber. Langmuir 2008, 24, 9381–9385. [Google Scholar] [CrossRef]
- Kaatze, U. Complex Permittivity of Water as a Function of Frequency and Temperature. J. Chem. Eng. Data 1989, 34, 371–374. [Google Scholar] [CrossRef]
- Lide, D.R. CRC Handbook of Chemistry and Physics; CRC Press: Boca Raton, FL, USA, 2004; ISBN 0-8493-0487-3. [Google Scholar]
- Kholodenko, A.L.; Douglas, J.F. Generalized Stokes-Einstein Equation for Spherical Particle Suspensions. Phys. Rev. E 1995, 51, 1081–1090. [Google Scholar] [CrossRef]
- Marchetti, M.C.; Fily, Y.; Henkes, S.; Patch, A.; Yllanes, D. Minimal Model of Active Colloids Highlights the Role of Mechanical Interactions in Controlling the Emergent Behavior of Active Matter. Curr. Opin. Colloid Interface Sci. 2016, 21, 34–43. [Google Scholar] [CrossRef]
- Suzuki, R.; Jiang, H.-R.; Sano, M. Validity of Fluctuation Theorem on Self-Propelling Particles. arXiv 2011, arXiv:1104.5607. [Google Scholar]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, C.; Jiang, Z.; Li, L.; Gilchrist, J.F.; Ou-Yang, H.D. Frequency Response of Induced-Charge Electrophoretic Metallic Janus Particles. Micromachines 2020, 11, 334. https://doi.org/10.3390/mi11030334
Shen C, Jiang Z, Li L, Gilchrist JF, Ou-Yang HD. Frequency Response of Induced-Charge Electrophoretic Metallic Janus Particles. Micromachines. 2020; 11(3):334. https://doi.org/10.3390/mi11030334
Chicago/Turabian StyleShen, Chong, Zhiyu Jiang, Lanfang Li, James F. Gilchrist, and H. Daniel Ou-Yang. 2020. "Frequency Response of Induced-Charge Electrophoretic Metallic Janus Particles" Micromachines 11, no. 3: 334. https://doi.org/10.3390/mi11030334