Development of Real-Time Measurement Platform for Stretchable and Rollable Functions of Flexible Electronics under Multiple Dynamic Loads


Abstract
:1. Introduction
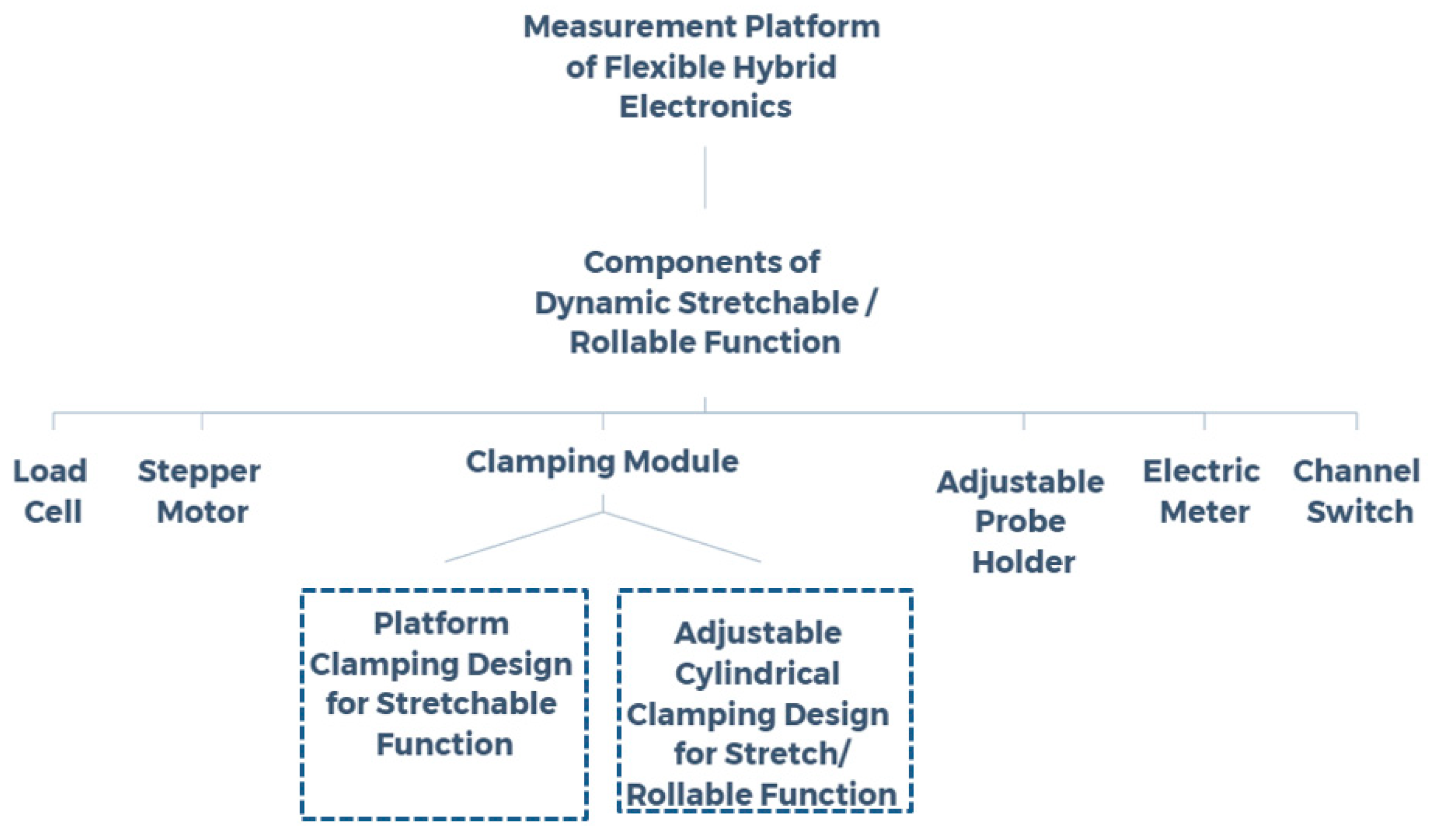
2. Dynamic Stretchable and Rollable Functions of the Measurement Platform
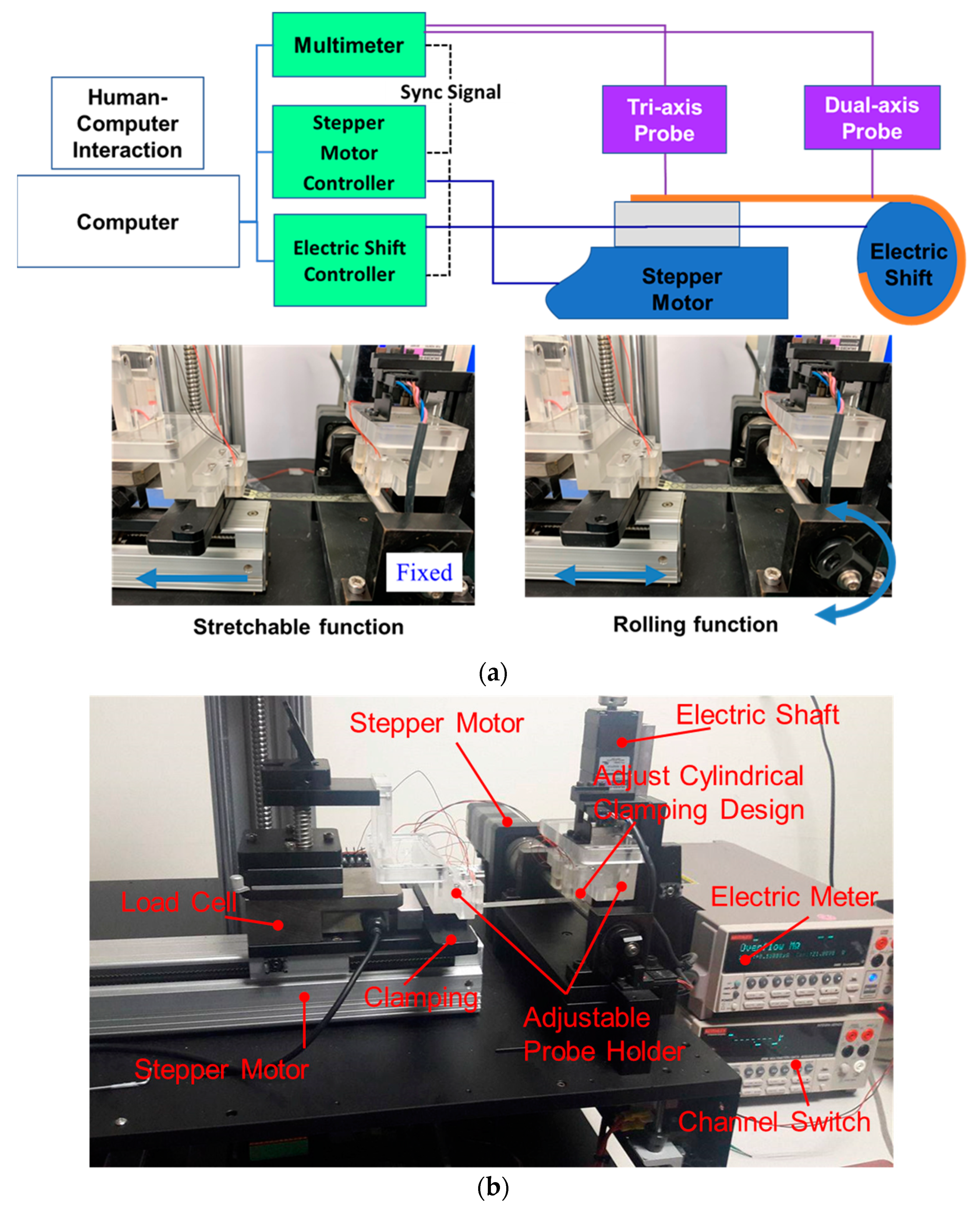
2.1. Design Concept of Measurement Instrument
2.2. Measurement Limitations and Platform Specifications
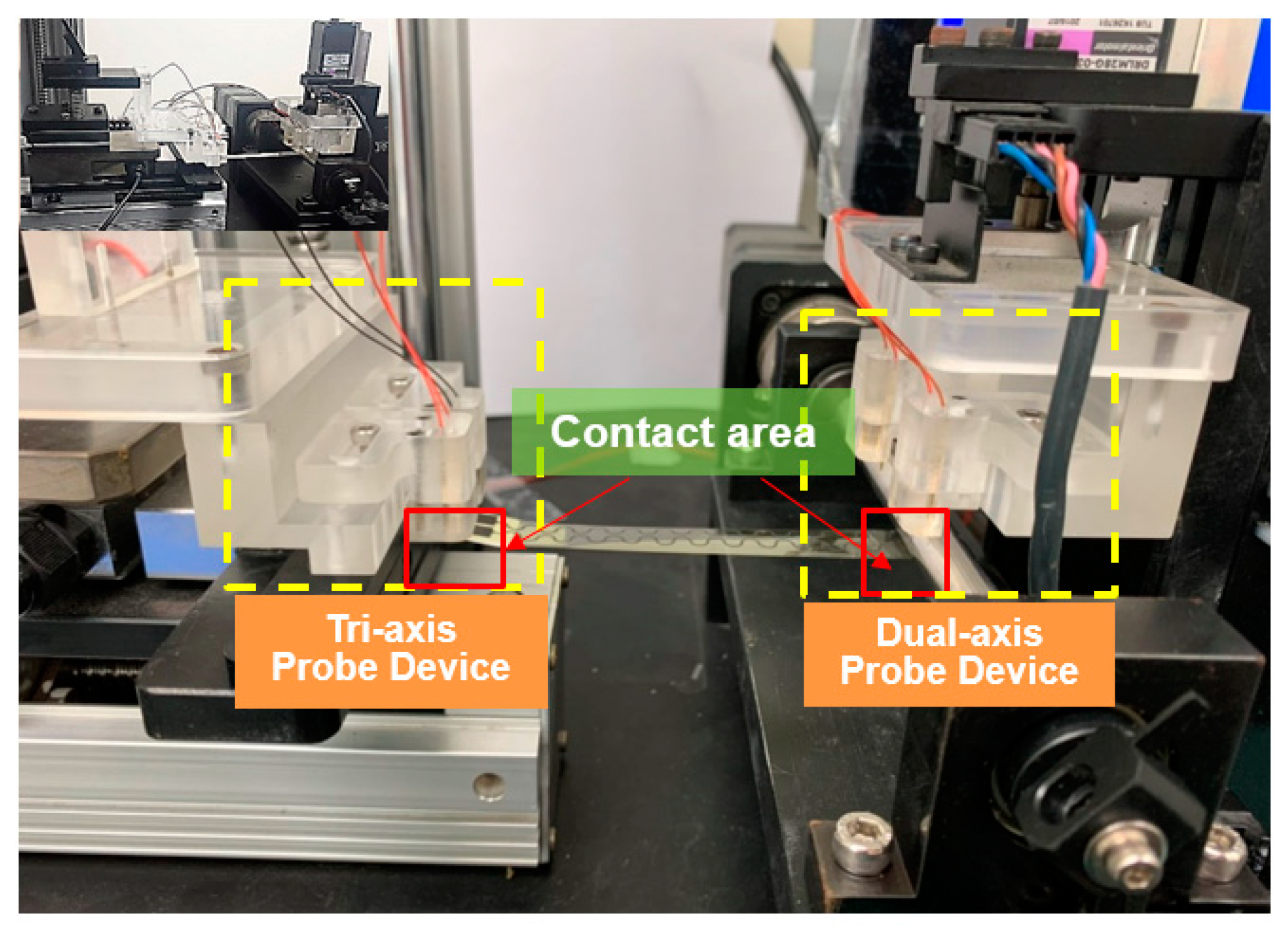
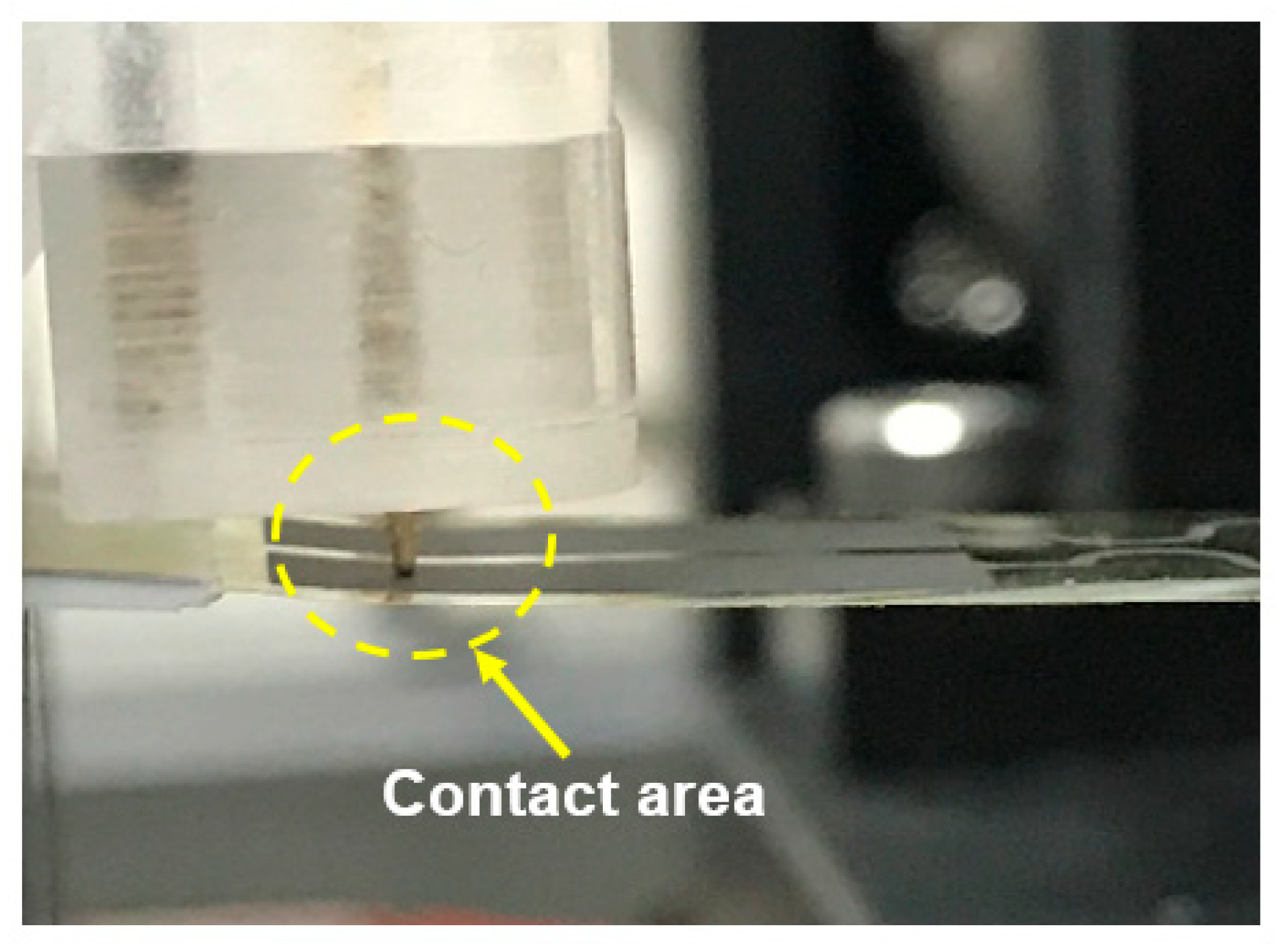
2.3. Probe Devices of the Dynamic Electrical Measurement System
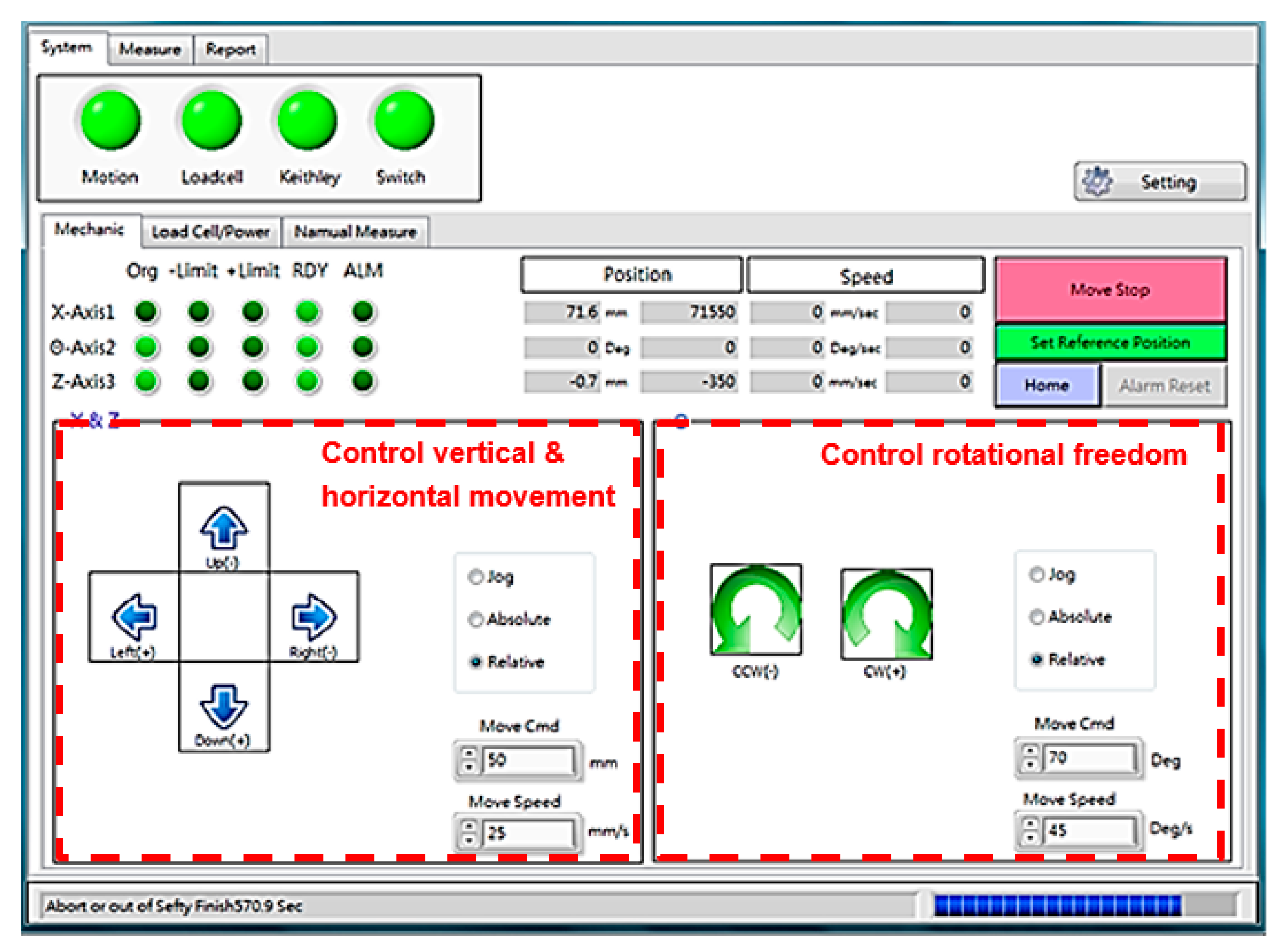
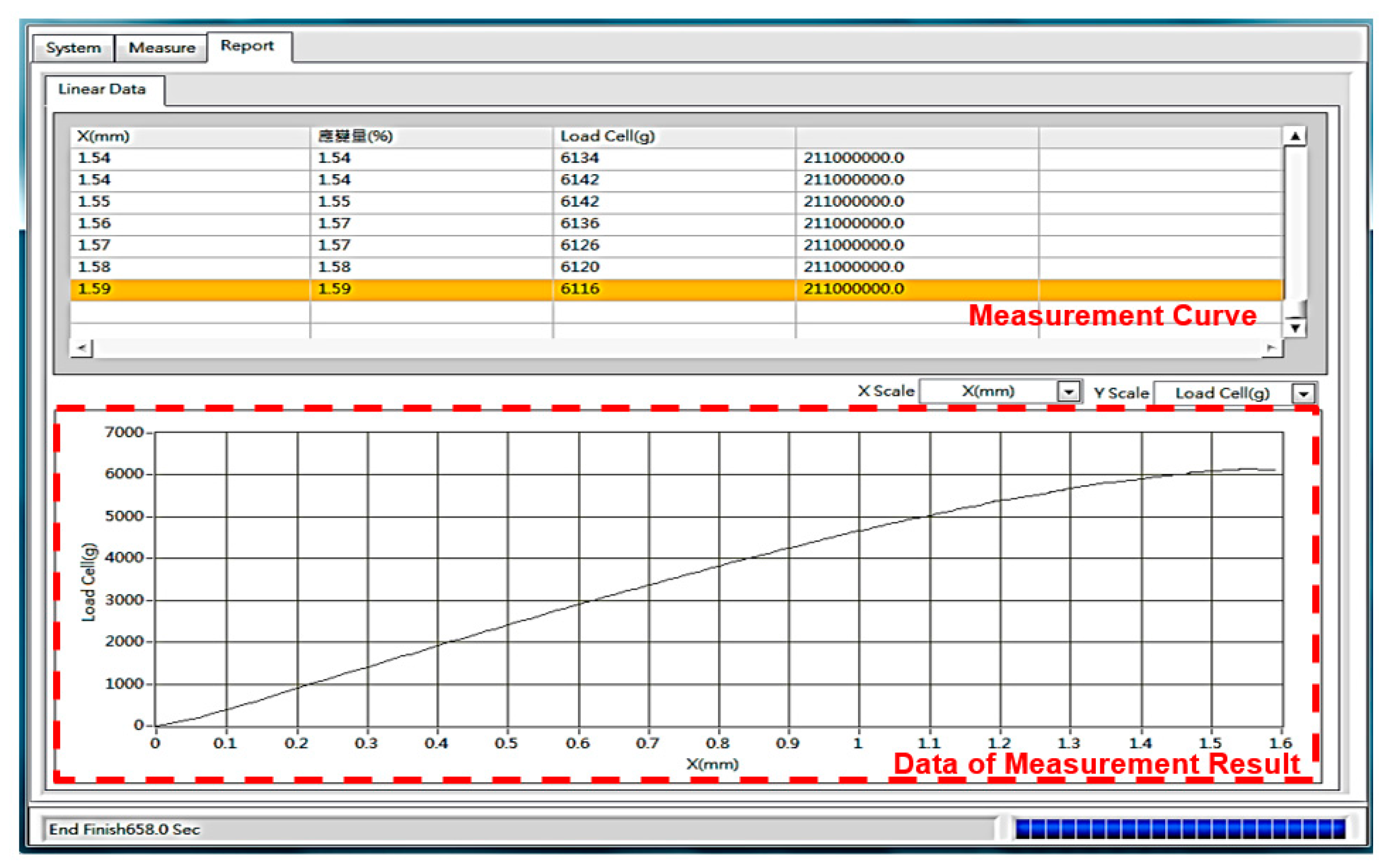
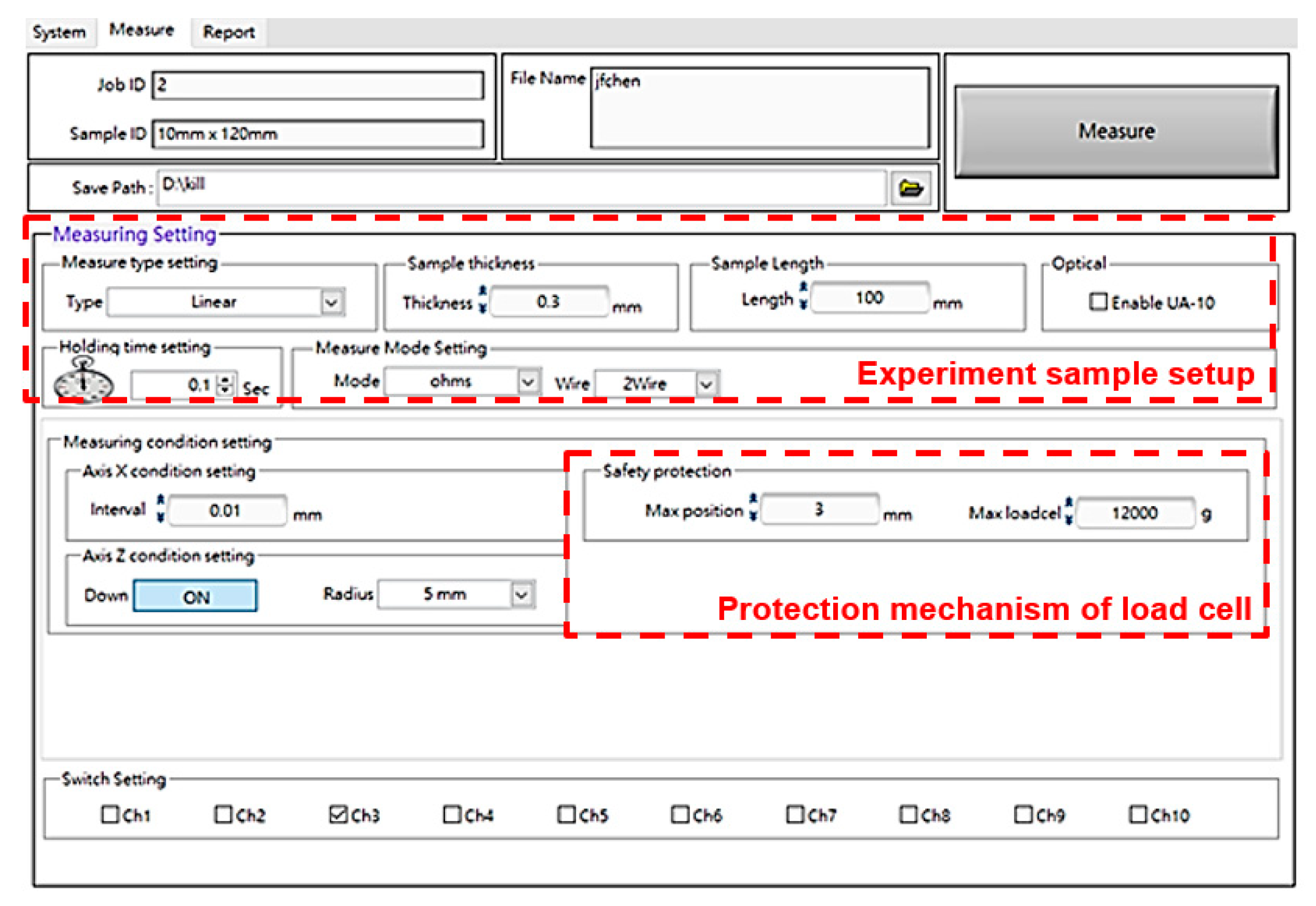
2.4. Human–machine Interface of the Measurement System
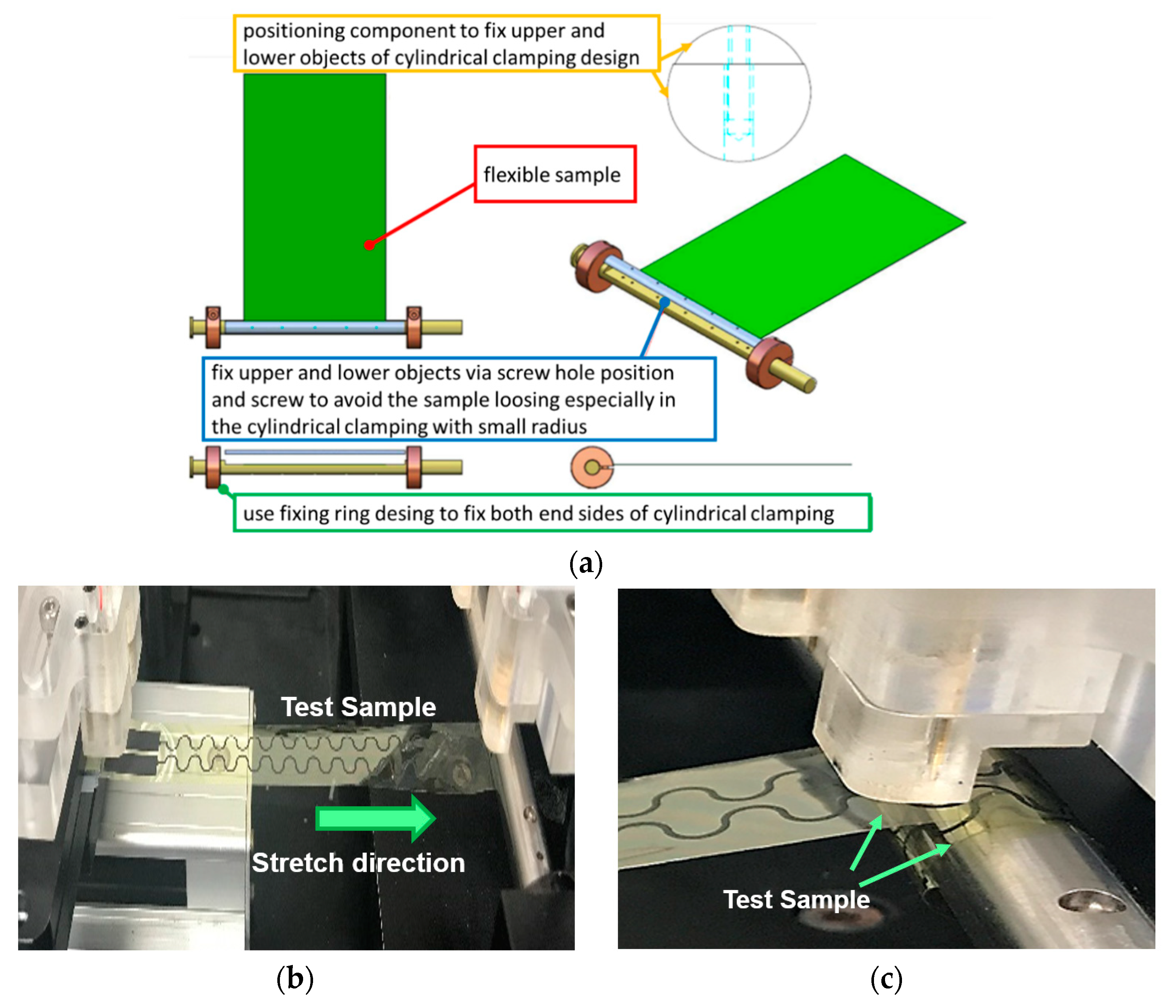
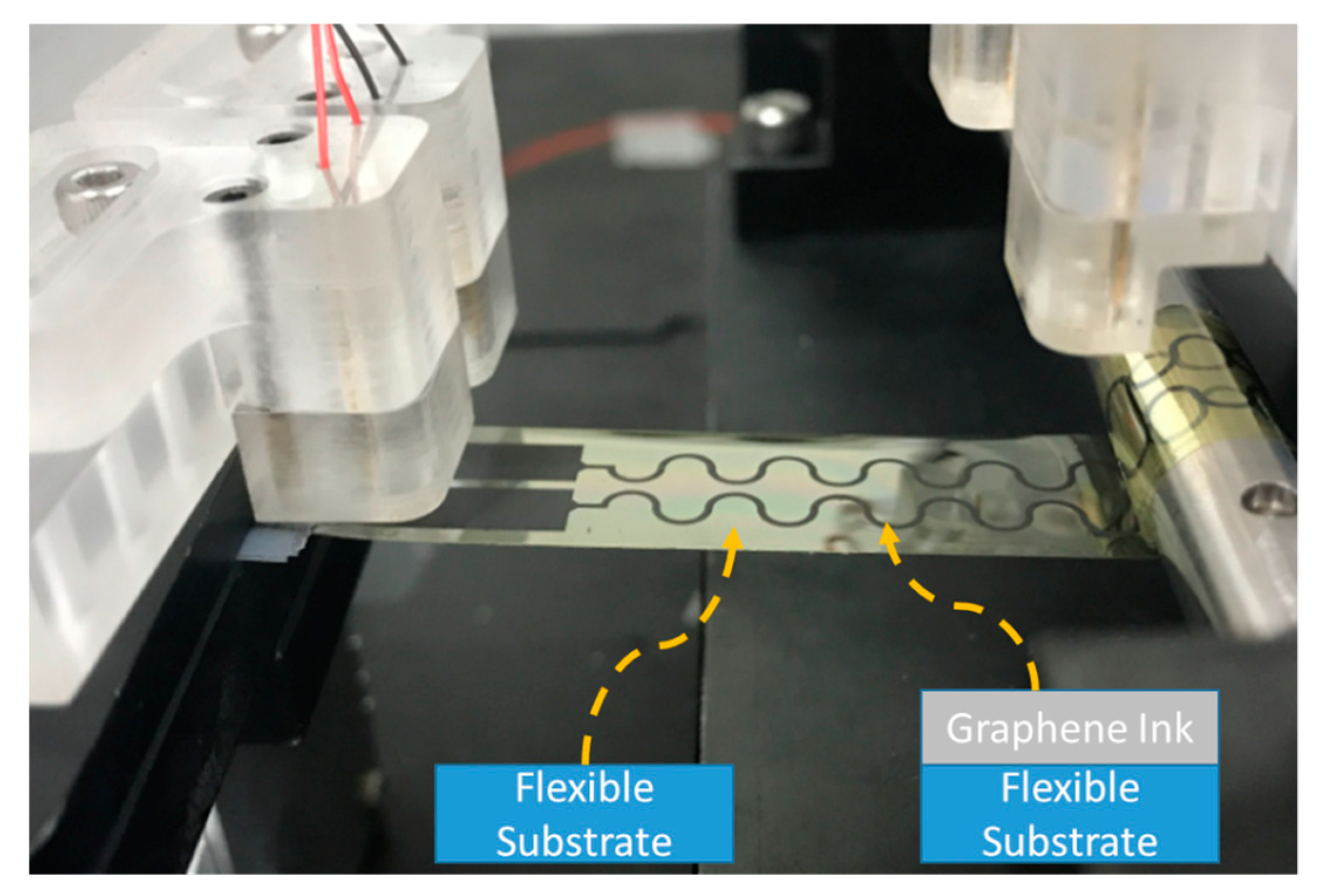
3. Validation of Measurement Platform with Graphene-ink Flexible Specimen
4. Experimental Results of Dynamic Loading Functions
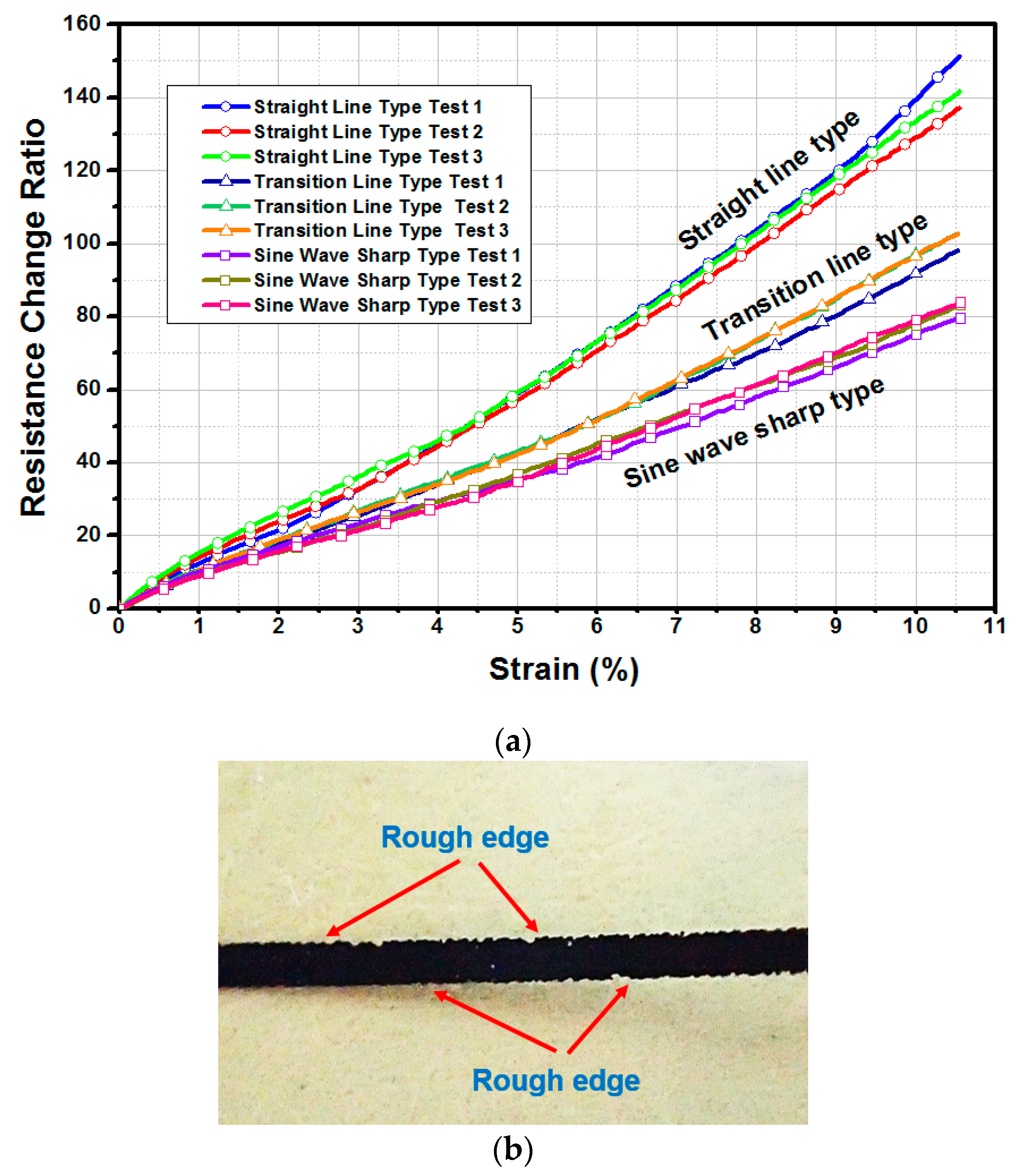
4.1. Experimental Results of Dynamic Stretchable Function
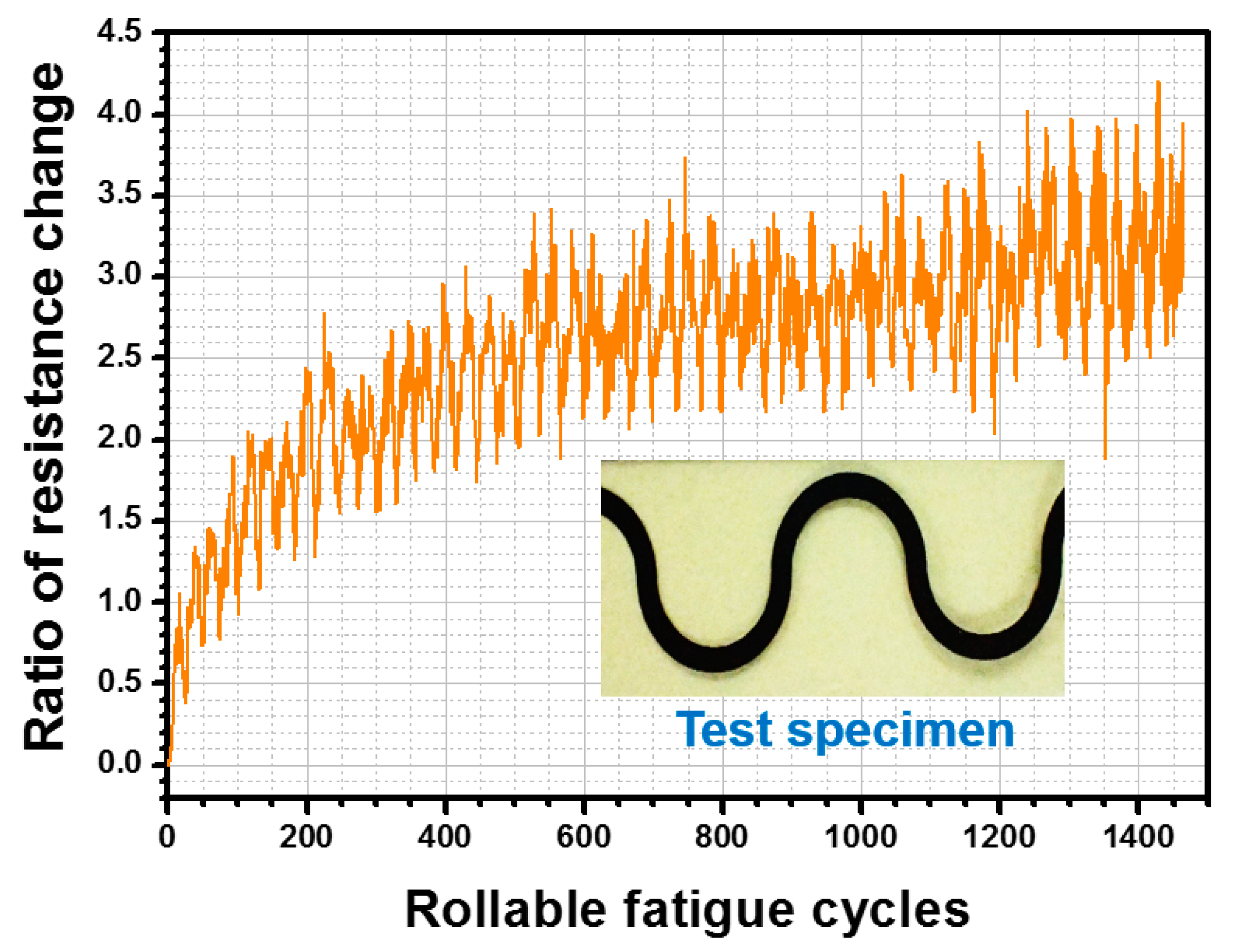
4.2. Experimental Results of Dynamic Rollable Function
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Cairns, D.R.; Crawford, G.P. Electromechanical properties of transparent conducting substrates for flexible electronic displays. Proc. IEEE 2005, 93, 1451–1458. [Google Scholar] [CrossRef]
- Servati, P.; Nathan, A. Functional pixel circuits for elastic AMOLED displays. Proc. IEEE 2005, 93, 1257–1264. [Google Scholar] [CrossRef]
- Okahisa, Y.; Yoshida, A.; Miyaguchi, S.; Yano, H. Optically transparent wood–cellulose nanocomposite as a base substrate for flexible organic light-emitting diode displays. Compos. Sci. Technol. 2009, 69, 1958–1961. [Google Scholar] [CrossRef]
- Ummartyotin, S.; Juntaro, J.; Sain, M.; Manuspiya, H. Si–O barrier technology for bacterial cellulose nanocomposite flexible displays. Carbohydr. Polym. 2011, 86, 337–342. [Google Scholar] [CrossRef]
- Ummartyotin, S.; Juntaro, J.; Sain, M.; Manuspiya, H. Development of transparent bacterial cellulose nanocomposite film as substrate for flexible organic light emitting diode (OLED) display. Ind. Crop. Prod. 2012, 35, 92–97. [Google Scholar] [CrossRef]
- Sharma, B.K.; Jang, B.; Lee, J.E.; Bae, S.H.; Kim, T.W.; Lee, H.J.; Kim, J.H.; Ahn, J.H. Load-controlled roll transfer of oxide transistors for stretchable electronics. Adv. Funct. Mater. 2013, 23, 2024–2032. [Google Scholar] [CrossRef]
- Yan, C.; Kang, W.; Wang, J.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Stretchable and wearable electrochromic devices. ACS Nano 2013, 8, 316–322. [Google Scholar] [CrossRef] [PubMed]
- Sekitani, T.; Someya, T. Stretchable, large-area organic electronics. Adv. Mater. 2010, 22, 2228–2246. [Google Scholar] [CrossRef] [PubMed]
- Sekitani, T.; Nakajima, H.; Maeda, H.; Fukushima, T.; Aida, T.; Hata, K.; Someya, T. Stretchable active-matrix organic light-emitting diode display using printable elastic conductors. Nat. Mater. 2009, 321, 494–499. [Google Scholar] [CrossRef] [PubMed]
- Sekitani, T.; Noguchi, Y.; Hata, K.; Fukushima, T.; Aida, T.; Someya, T. A rubberlike stretchable active matrix using elastic conductors. Science 2008, 321, 1468–1472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khan, Y.; Garg, M.; Gui, Q.; Schadt, M.; Gaikwad, A.; Han, D.; Yamamoto, N.A.D.; Hart, P.; Welte, R.; Wilson, W.; et al. Flexible hybrid electronics: Direct interfacing of soft and hard electronics for wearable health monitoring. Adv. Funct. Mater. 2016, 26, 8764–9775. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, Y.; Cai, S.; Han, Z.; Liu, X.; Wang, F.; Cao, Y.; Wang, Z.; Li, H.; Chen, Y.; et al. Flexible hybridelectronics for digital healthcare. Adv. Mater. 2019, 1902062, 1–23. [Google Scholar] [CrossRef]
- Zhong, T.; Jin, N.; Yuan, W.; Zhou, C.; Gu, W.; Cui, Z. Printable stretchable silver ink and application to printed RFID tags for wearable electronics. Materials 2019, 12, 3036. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Song, J.K.; Do, K.; Koo, J.H.; Son, D.; Kim, D.H. Nanomaterials-based flexible and stretchable bioelectronics. MRS Bull. 2019, 44, 643–656. [Google Scholar] [CrossRef]
- Rogers, J.A.; Someya, T.; Huang, Y. Materials and mechanics for stretchable electronics. Science 2010, 327, 1603–1607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.; Tao, L.Q.; Wang, D.Y.; Zhang, T.Y.; Yang, Y.; Ren, T.L. Flexible, highly sensitive pressure sensor with a wide range based on graphene-silk network structure. Appl. Phys. Lett. 2017, 110, 123508. [Google Scholar] [CrossRef]
- Rinaldi, A.; Tamburrano, A.; Fortunato, M.; Sarto, M.S. A flexible and highly sensitive pressure sensor based on a PDMS foam coated with graphene nanoplatelets. Sensors 2016, 16, 2148. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load Cell Specification | Stepper Motor | Adjustable Probe Holder | |||
|---|---|---|---|---|---|
| Rated load | 10 kg | Positioning accuracy | 0.02 mm | Positioning accuracy | 0.02 mm |
| Allowable overload | 150% | Stroke | 200 mm | Stroke | 30 mm |
| Total error | 0.05% | Maximum allowable load | <14 kg | Maximum allowable load | <1 kg |
| Reliability | 0.03% | Maximum velocity | 300 mm/s | – | – |
| Creep function | 0.05%/20 min | Minimum displacement | 0.01 mm | – | – |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, C.-C.; Chuang, J.-C.; Shih, R.-C.; Wang, C.-W. Development of Real-Time Measurement Platform for Stretchable and Rollable Functions of Flexible Electronics under Multiple Dynamic Loads. Micromachines 2020, 11, 106. https://doi.org/10.3390/mi11010106
Lee C-C, Chuang J-C, Shih R-C, Wang C-W. Development of Real-Time Measurement Platform for Stretchable and Rollable Functions of Flexible Electronics under Multiple Dynamic Loads. Micromachines. 2020; 11(1):106. https://doi.org/10.3390/mi11010106
Chicago/Turabian StyleLee, Chang-Chun, Jui-Chang Chuang, Ruei-Ci Shih, and Chi-Wei Wang. 2020. "Development of Real-Time Measurement Platform for Stretchable and Rollable Functions of Flexible Electronics under Multiple Dynamic Loads" Micromachines 11, no. 1: 106. https://doi.org/10.3390/mi11010106