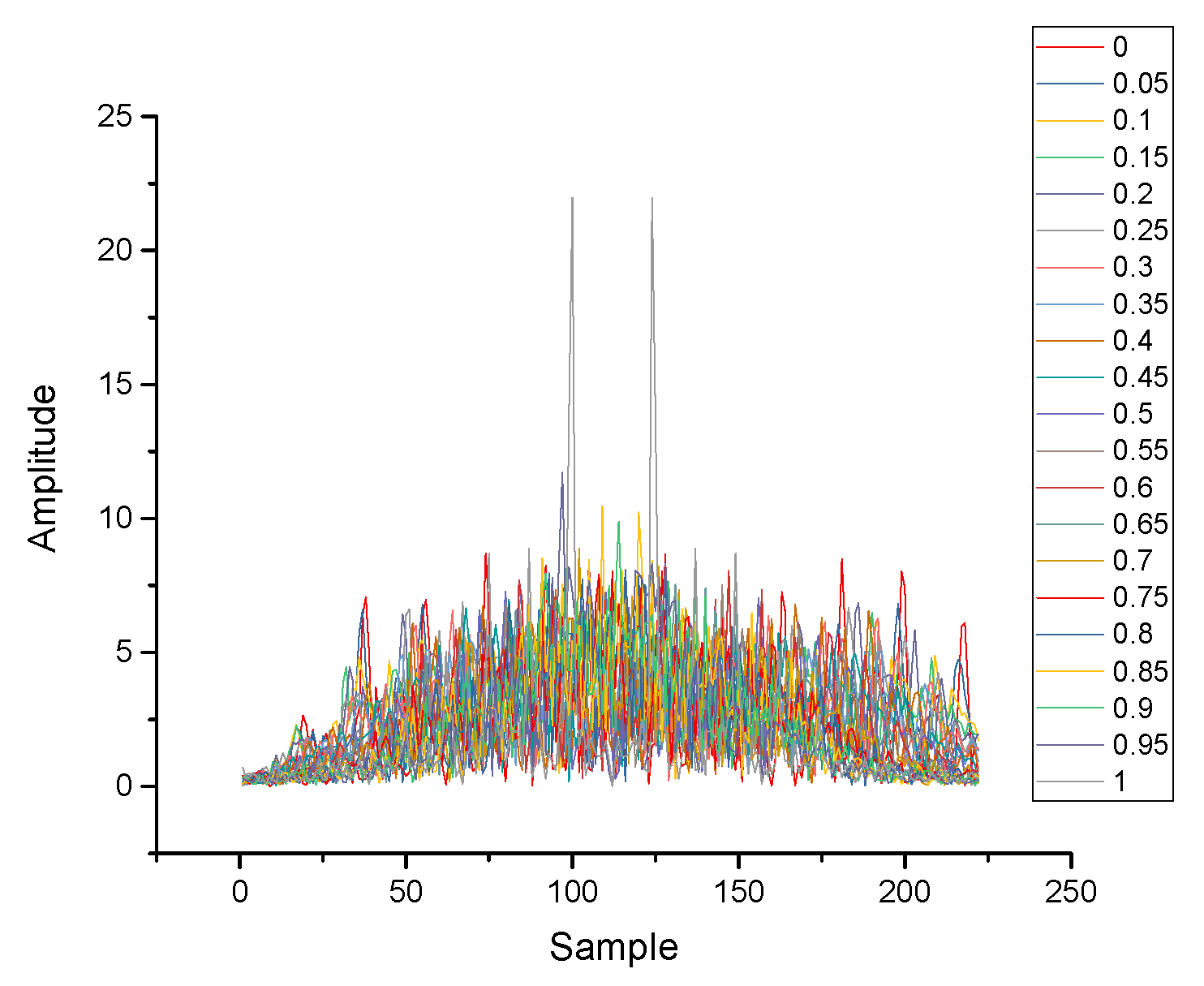
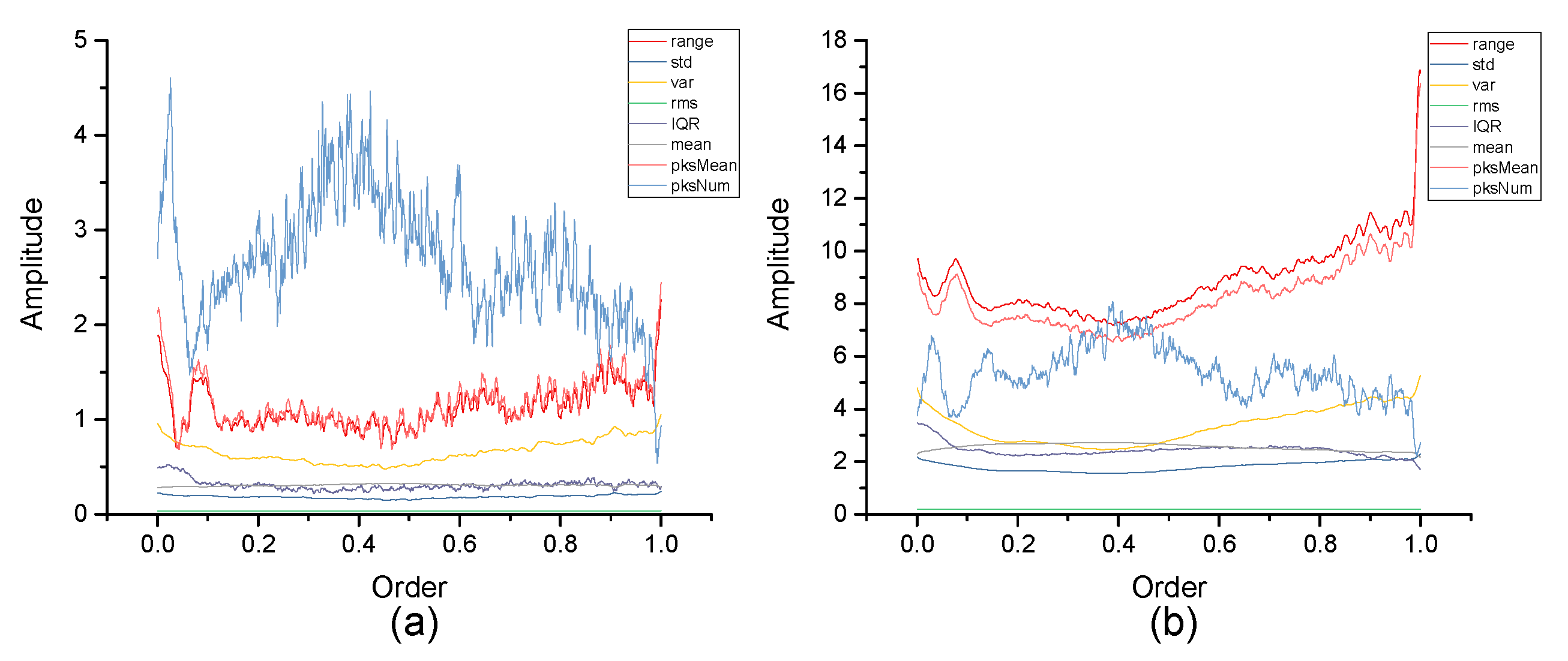
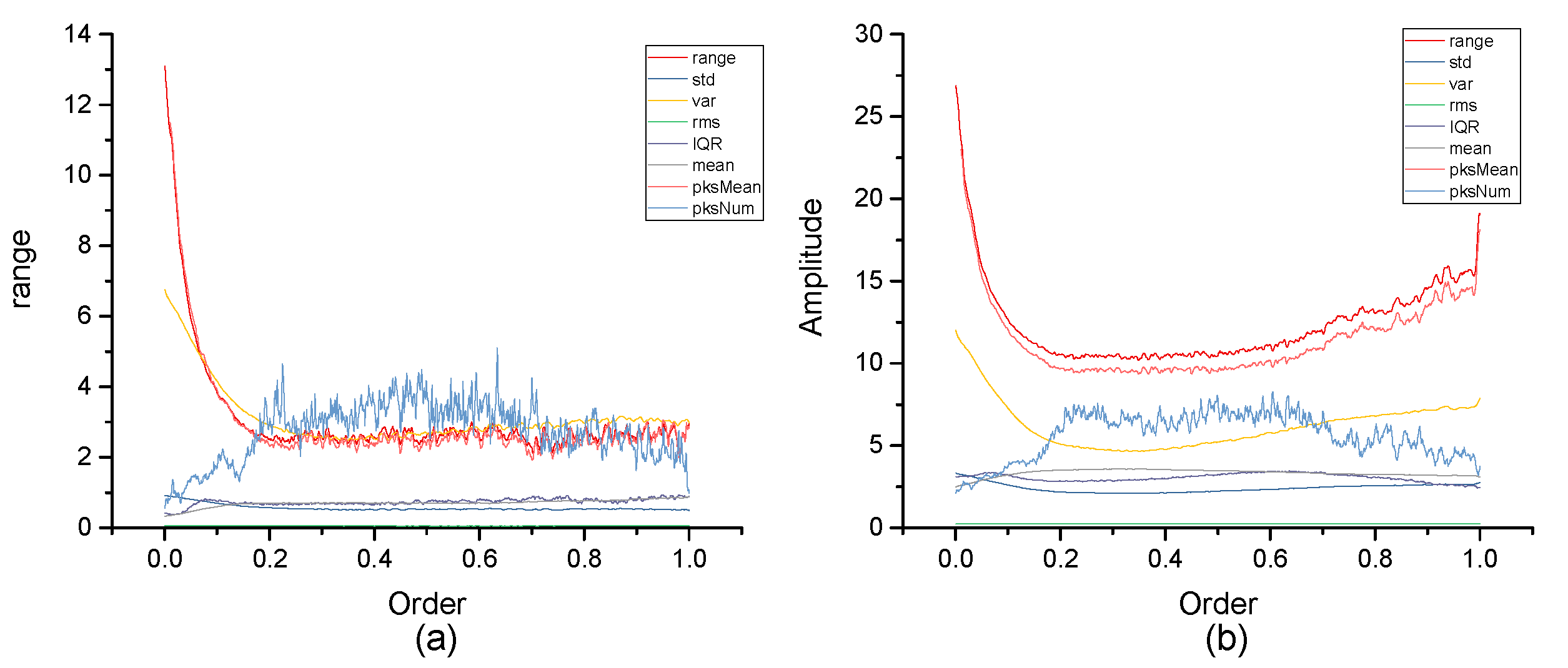
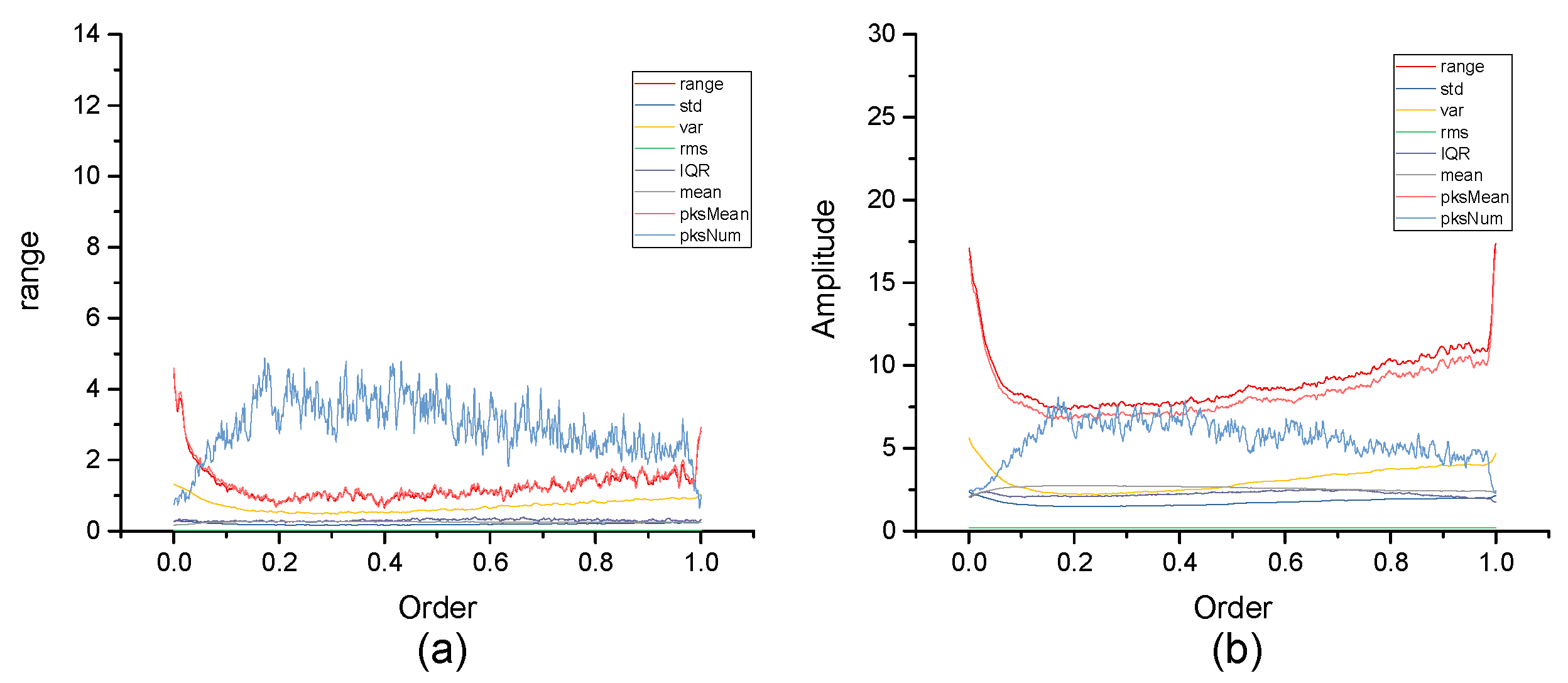
Figure 1.
Results of Multiorder fractional Fourier transform (FRFT) with single action (order: 0–1).
Figure 1.
Results of Multiorder fractional Fourier transform (FRFT) with single action (order: 0–1).
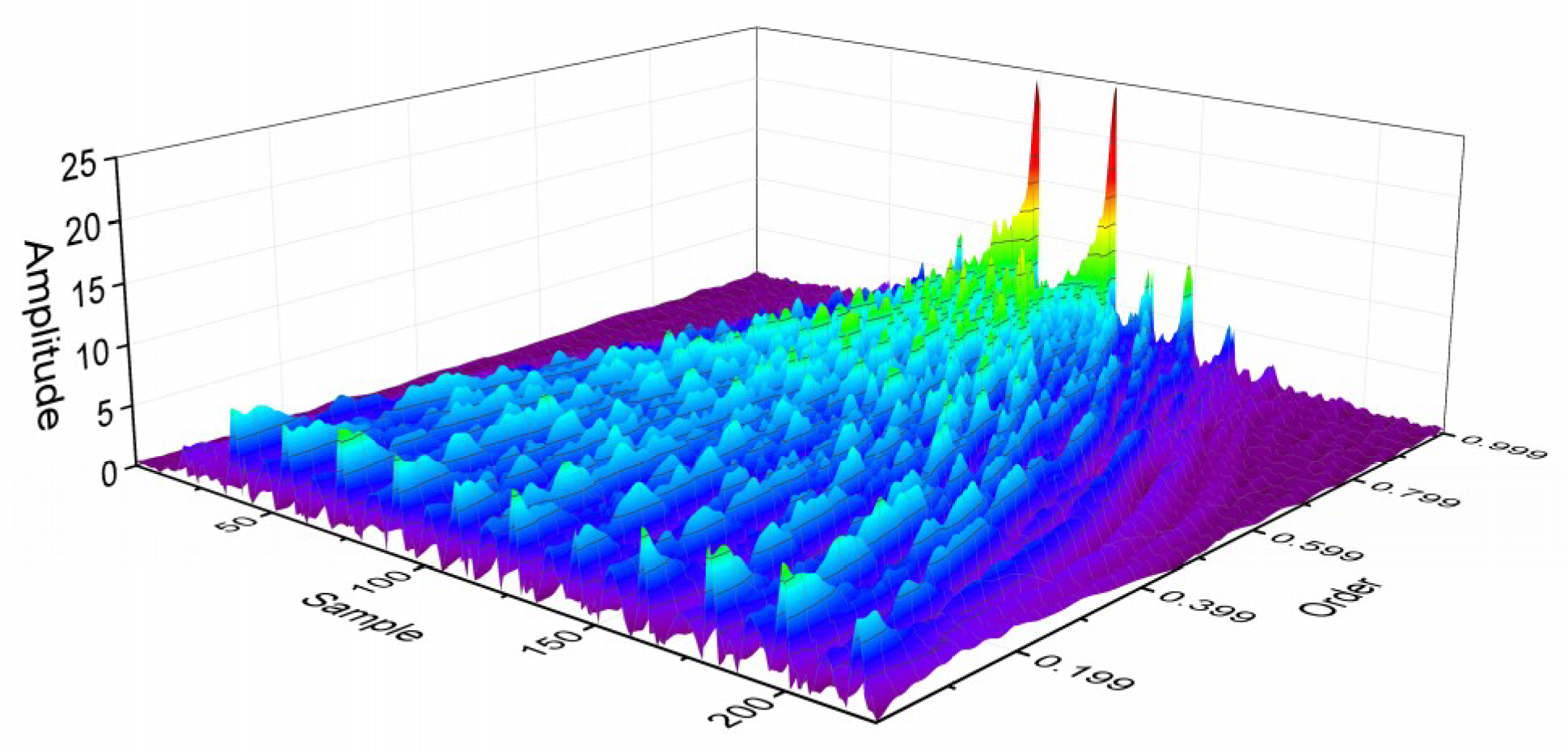
Figure 2.
Results of Multiorder FRFT with single action in 3D (order: 0–1).
Figure 2.
Results of Multiorder FRFT with single action in 3D (order: 0–1).
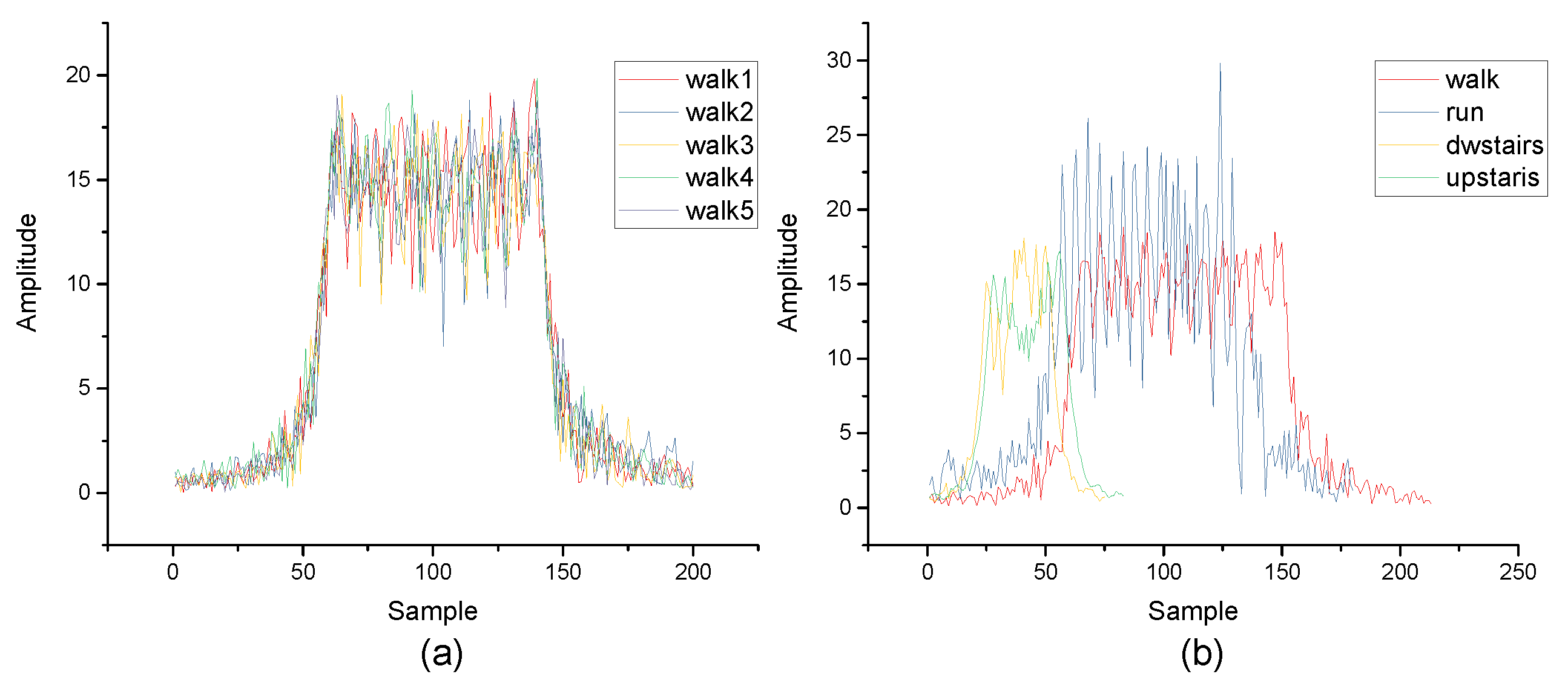
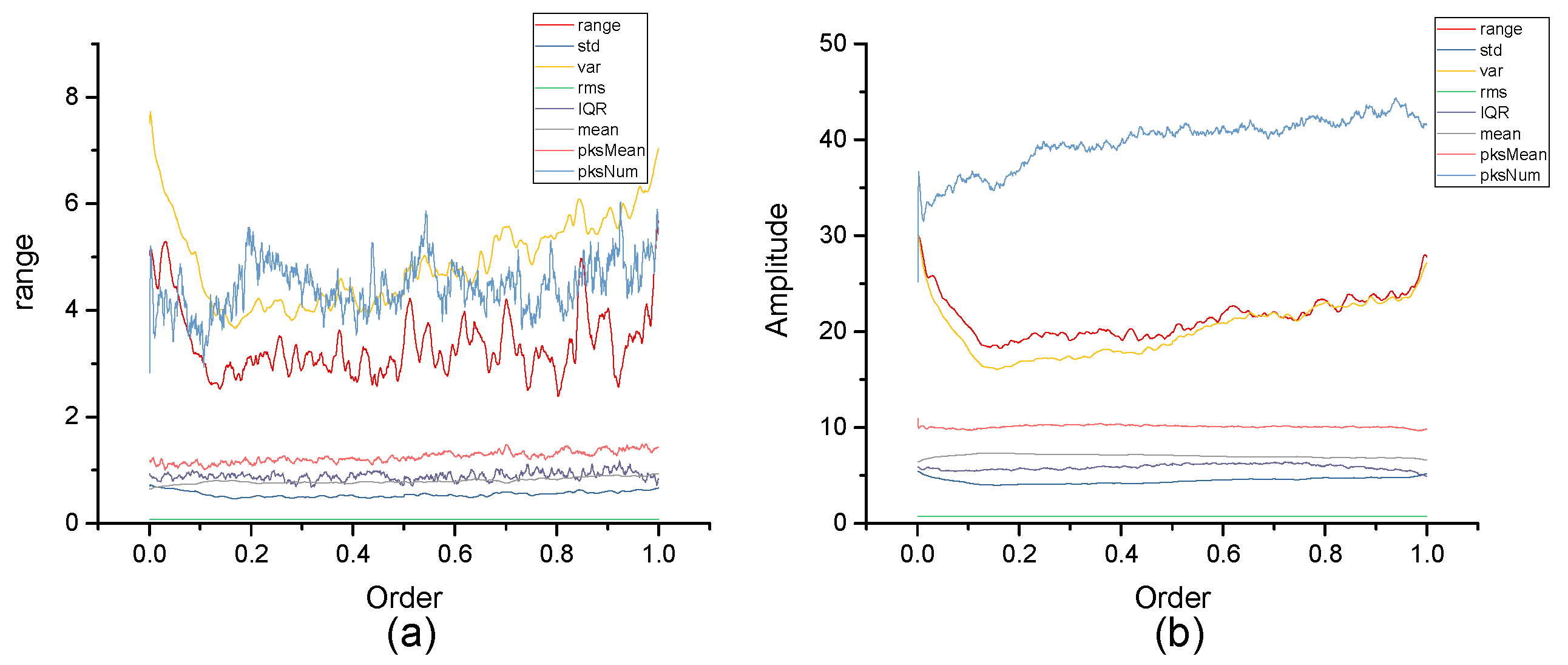
Figure 3.
(a) The results of FRFT of walking in 0.7 order. (b) The results of FRFT of different actions in 0.7 order.
Figure 3.
(a) The results of FRFT of walking in 0.7 order. (b) The results of FRFT of different actions in 0.7 order.
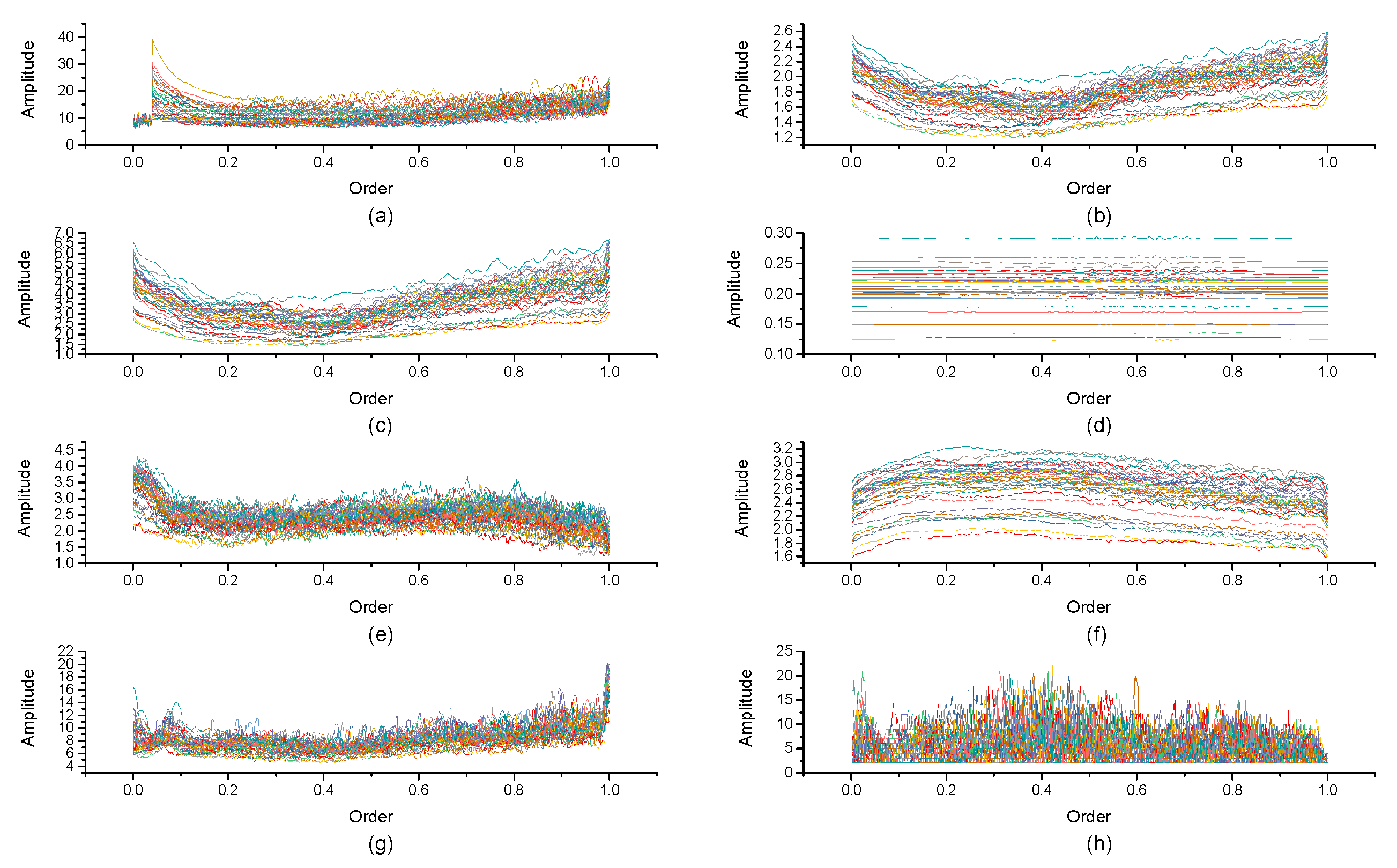
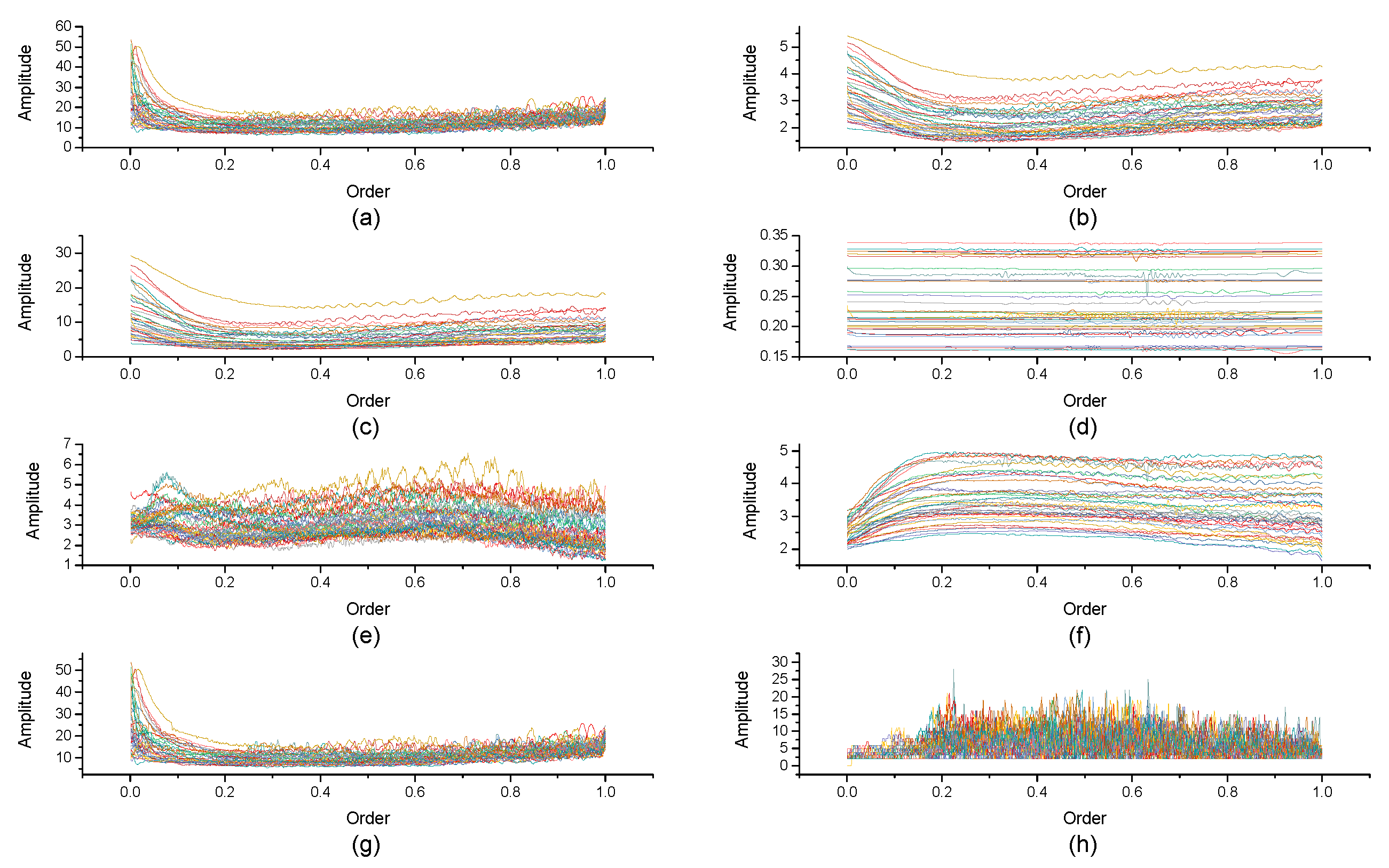
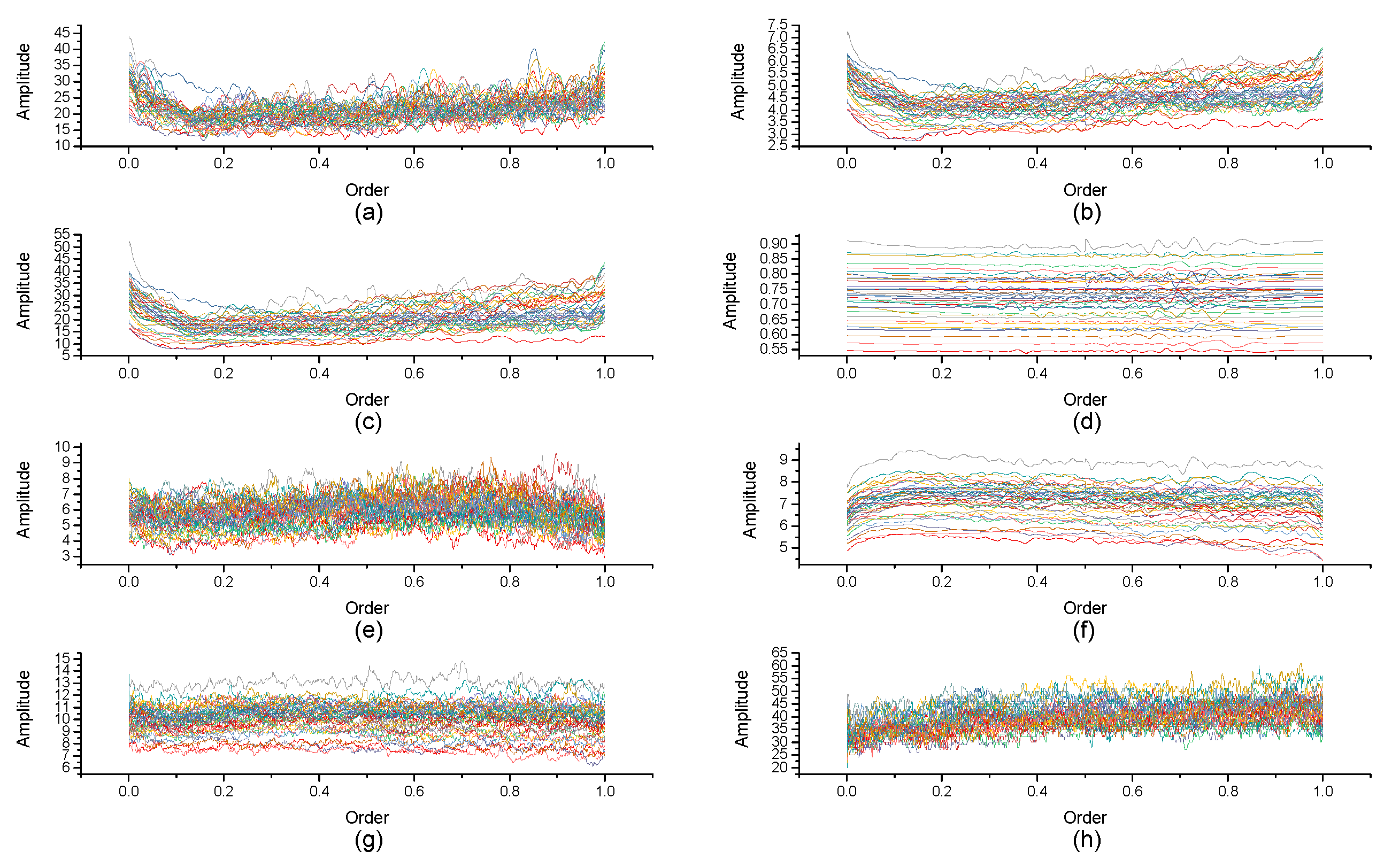
Figure 4.
The Order–Amplitude figures of different features of 40 groups for the walk action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 4.
The Order–Amplitude figures of different features of 40 groups for the walk action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 5.
Standard deviation and mean of eight features of the walk action. (a) The standard deviation of each feature, (b) The mean of each feature.
Figure 5.
Standard deviation and mean of eight features of the walk action. (a) The standard deviation of each feature, (b) The mean of each feature.
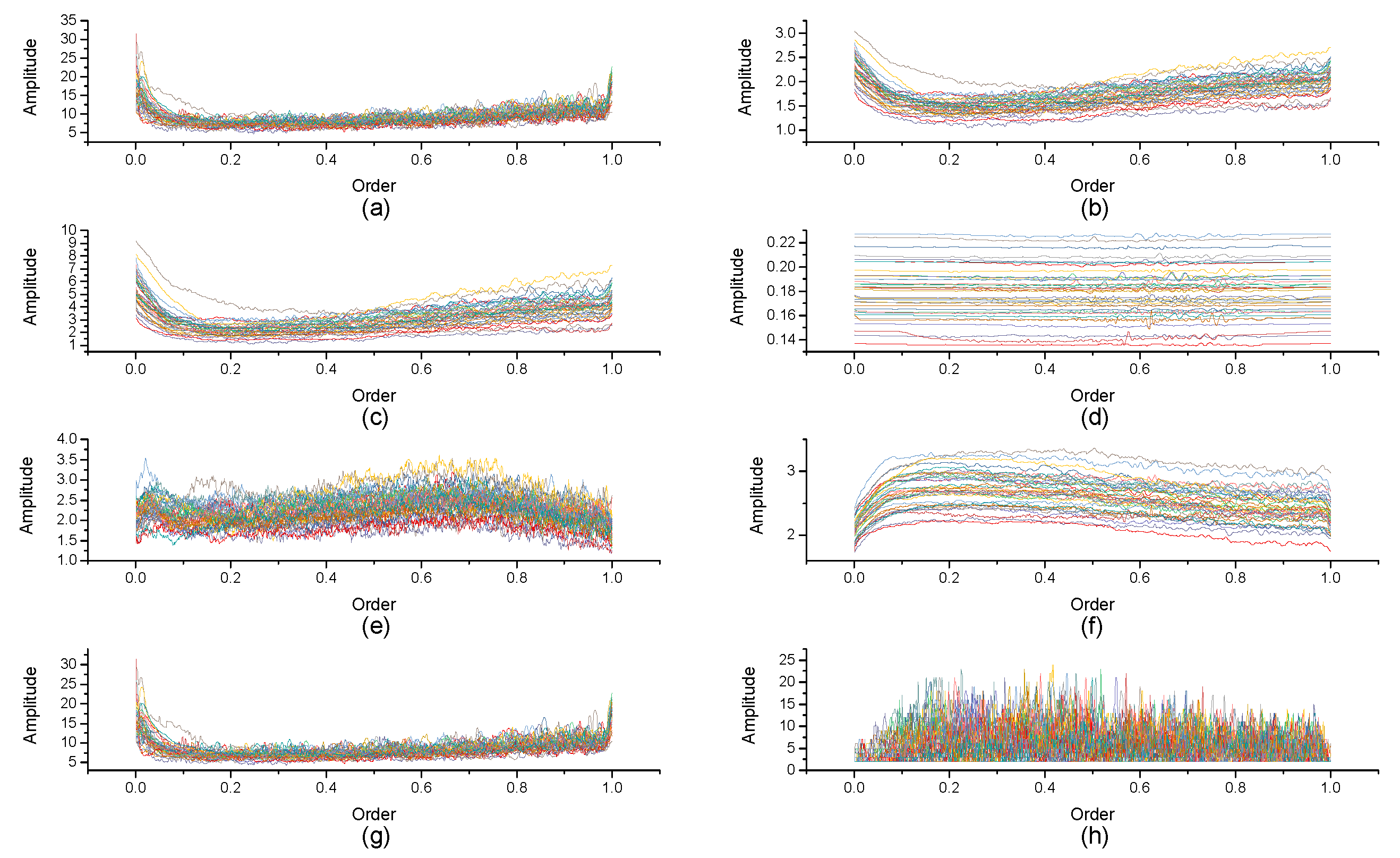
Figure 6.
The Order–Amplitude figures of different features of 40 groups for the upstairs action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 6.
The Order–Amplitude figures of different features of 40 groups for the upstairs action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 7.
Standard deviation and mean of eight features of the upstairs action. (a) The standard deviation of each feature, (b) The mean of each feature.
Figure 7.
Standard deviation and mean of eight features of the upstairs action. (a) The standard deviation of each feature, (b) The mean of each feature.
Figure 8.
The Order–Amplitude figures of different features of 40 groups for the dwstairs action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 8.
The Order–Amplitude figures of different features of 40 groups for the dwstairs action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 9.
Standard deviation and mean of eight features of the dwstairs action. (a) The standard deviation of each feature, (b) The mean of each feature.
Figure 9.
Standard deviation and mean of eight features of the dwstairs action. (a) The standard deviation of each feature, (b) The mean of each feature.
Figure 10.
The Order–Amplitude figure of different features of 40 groups for the run action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 10.
The Order–Amplitude figure of different features of 40 groups for the run action. (a) , (b) , (c) , (d) , (e) , (f) , (g) and (h) .
Figure 11.
Standard deviation and mean of eight features of the run action. (a) The standard deviation of each feature, (b) The mean of each feature.
Figure 11.
Standard deviation and mean of eight features of the run action. (a) The standard deviation of each feature, (b) The mean of each feature.
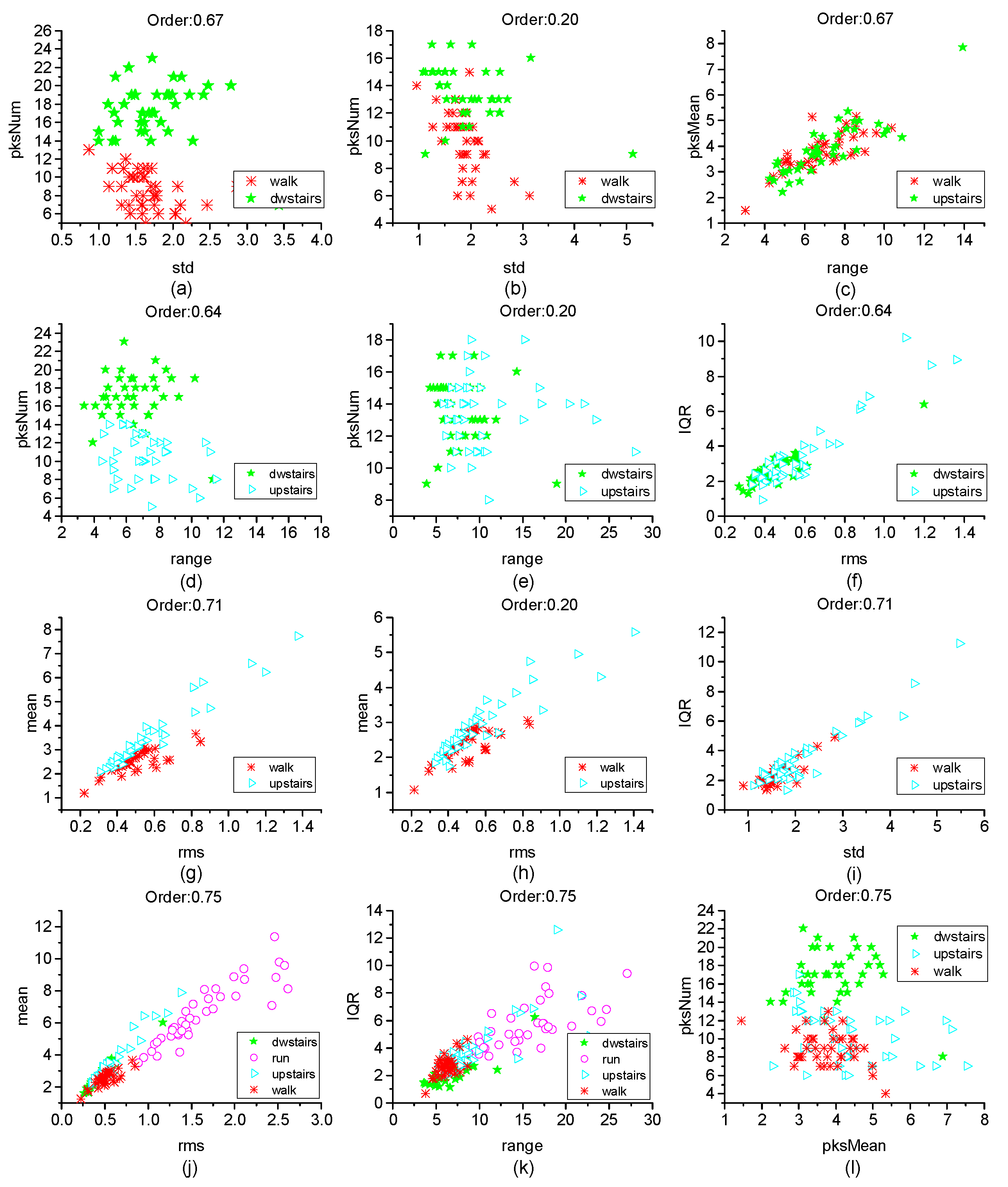
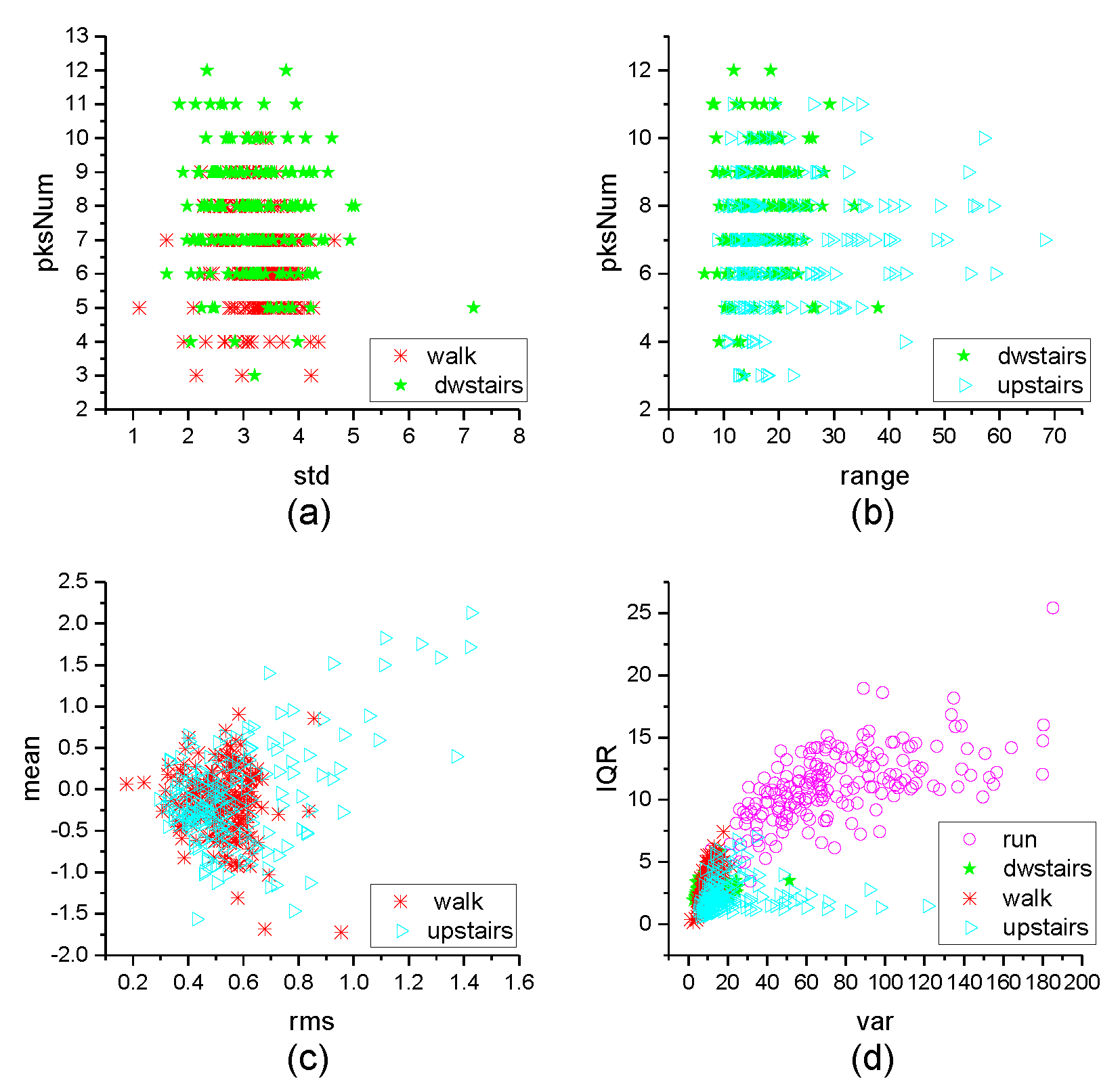
Figure 12.
The effect of classification. (a) walk and dwstairs with the features and when Order = 0.67; (b) walk and dwstairs with the features and when Order = 0.20; (c) walk and dwstairs with the features and when Order = 0.67; (d) dwstairs and upstairs with the features and when Order = 0.64; (e) dwstairs and upstairs with the features and when Order = 0.20; (f) dwstairs and upstairs with the features and when Order = 0.64; (g) walk and upstairs with the features and when Order = 0.71; (h) walk and upstairs with the features and when Order = 0.20; (i) walk and upstairs with the features and when Order = 0.71; (j) all the actions with the features and when Order = 0.75; (k) all the actions with the features and when Order = 0.75; (l) all the actions with the features and when Order = 0.75.
Figure 12.
The effect of classification. (a) walk and dwstairs with the features and when Order = 0.67; (b) walk and dwstairs with the features and when Order = 0.20; (c) walk and dwstairs with the features and when Order = 0.67; (d) dwstairs and upstairs with the features and when Order = 0.64; (e) dwstairs and upstairs with the features and when Order = 0.20; (f) dwstairs and upstairs with the features and when Order = 0.64; (g) walk and upstairs with the features and when Order = 0.71; (h) walk and upstairs with the features and when Order = 0.20; (i) walk and upstairs with the features and when Order = 0.71; (j) all the actions with the features and when Order = 0.75; (k) all the actions with the features and when Order = 0.75; (l) all the actions with the features and when Order = 0.75.
![Micromachines 10 00333 g012]()
Figure 13.
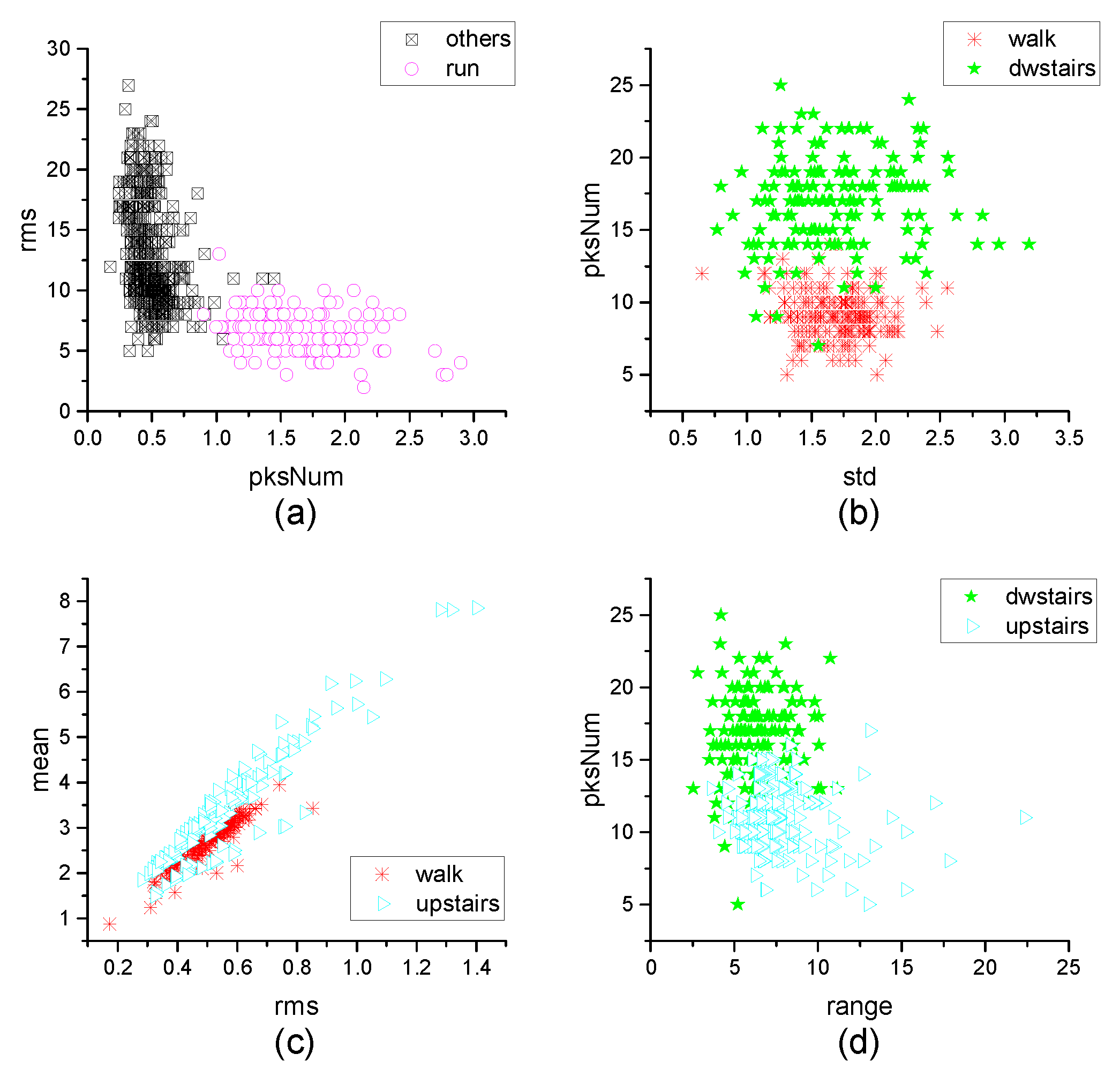
The effect of classification with two features extracted directly in the time domain without FRFT. (a) walk and dwstairs with the features and ; (b) dwstairs and upstairs with the features and ; (c) walk and upstairs with the features and ; (d) all the actions with the features and .
Figure 13.
The effect of classification with two features extracted directly in the time domain without FRFT. (a) walk and dwstairs with the features and ; (b) dwstairs and upstairs with the features and ; (c) walk and upstairs with the features and ; (d) all the actions with the features and .
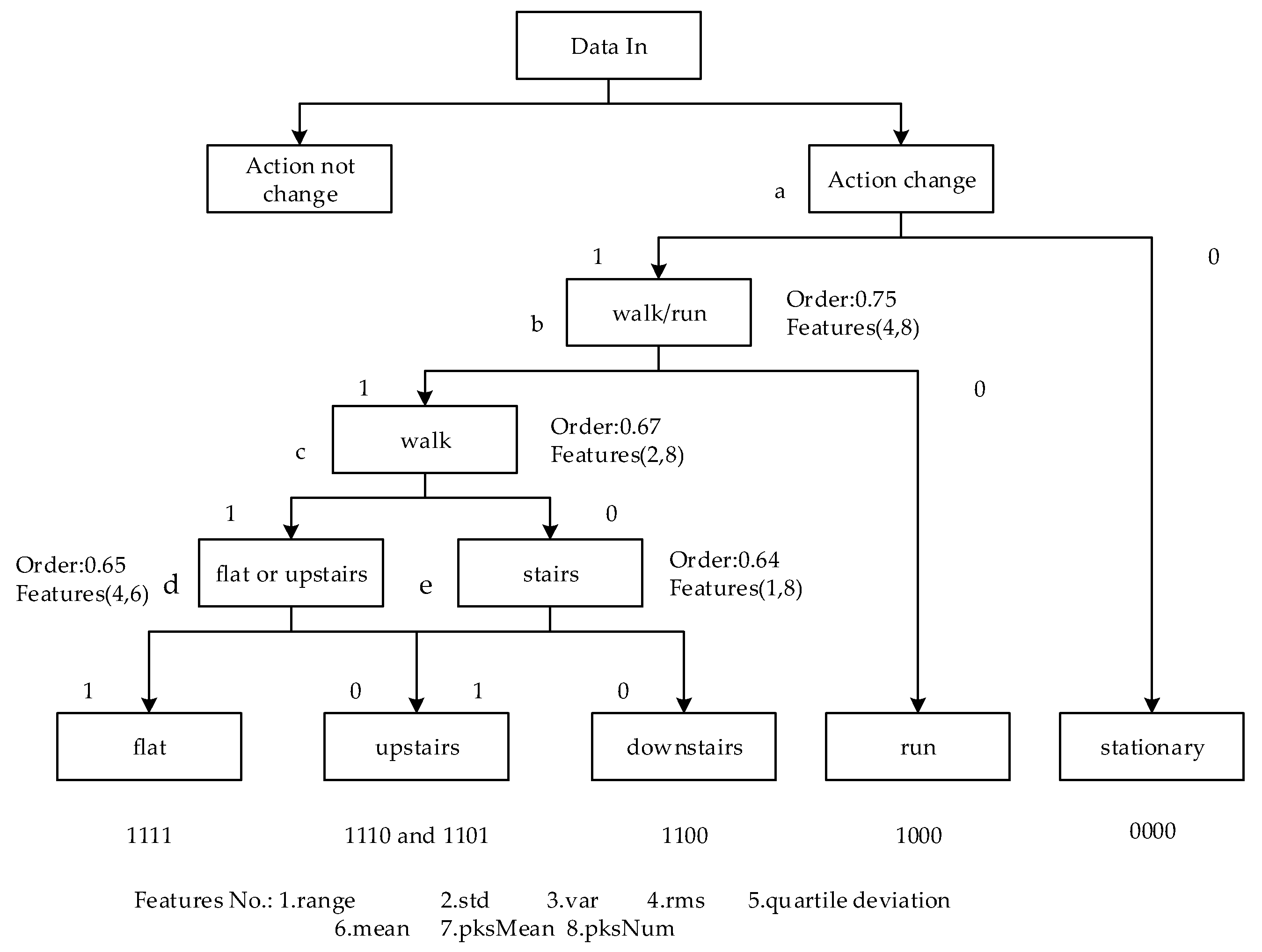
Figure 14.
The structure and process of the classifier. As different orders and feature vectors are needed to classify walk, upstairs and dwstairs, one can distinguish walk and dwstairs first, and then separate upstairs from walk and dwstairs, respectively, then separate upstairs from walk and dwstairs, respectively.
Figure 14.
The structure and process of the classifier. As different orders and feature vectors are needed to classify walk, upstairs and dwstairs, one can distinguish walk and dwstairs first, and then separate upstairs from walk and dwstairs, respectively, then separate upstairs from walk and dwstairs, respectively.
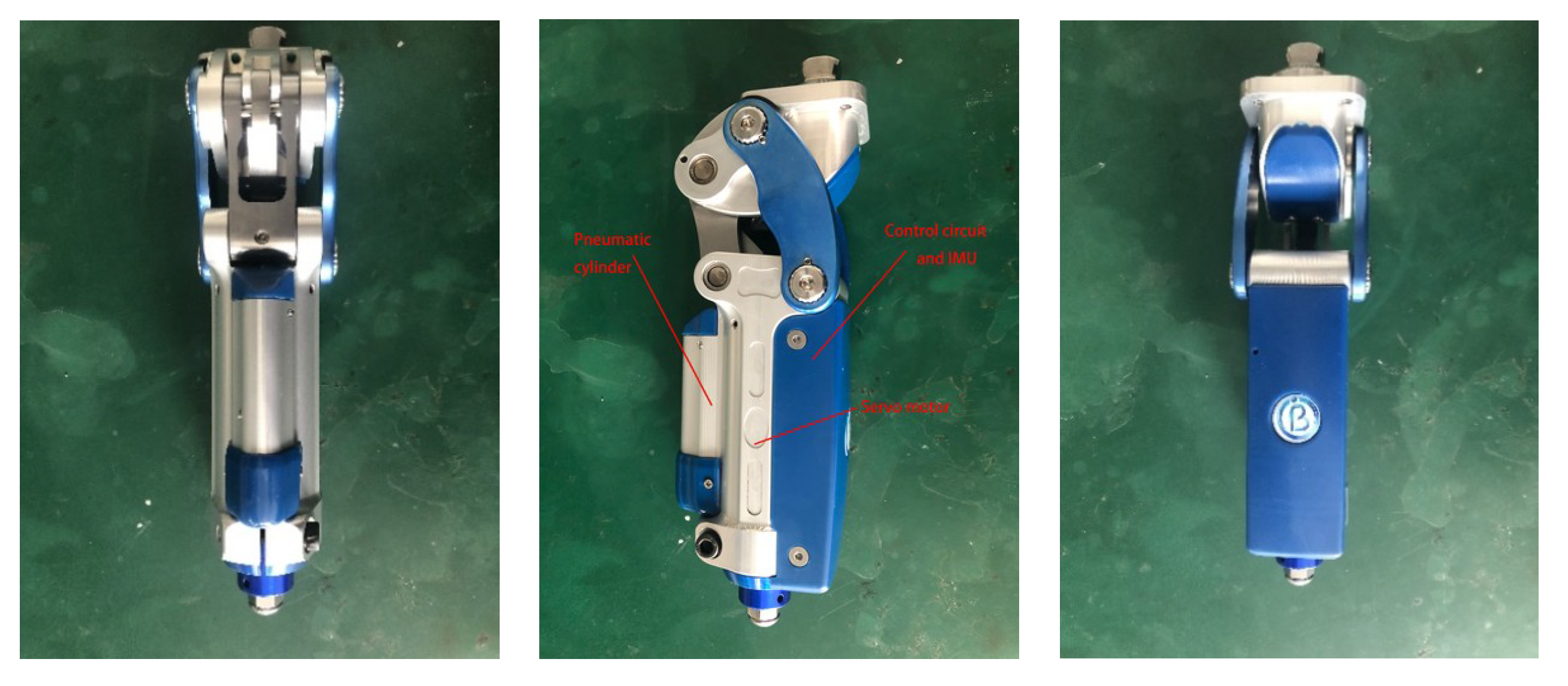
Figure 15.
The artificial knee. The position of the pneumatic cylinder, servo motor and control circuit with inertial measurement unit (IMU) have been pointed out.
Figure 15.
The artificial knee. The position of the pneumatic cylinder, servo motor and control circuit with inertial measurement unit (IMU) have been pointed out.
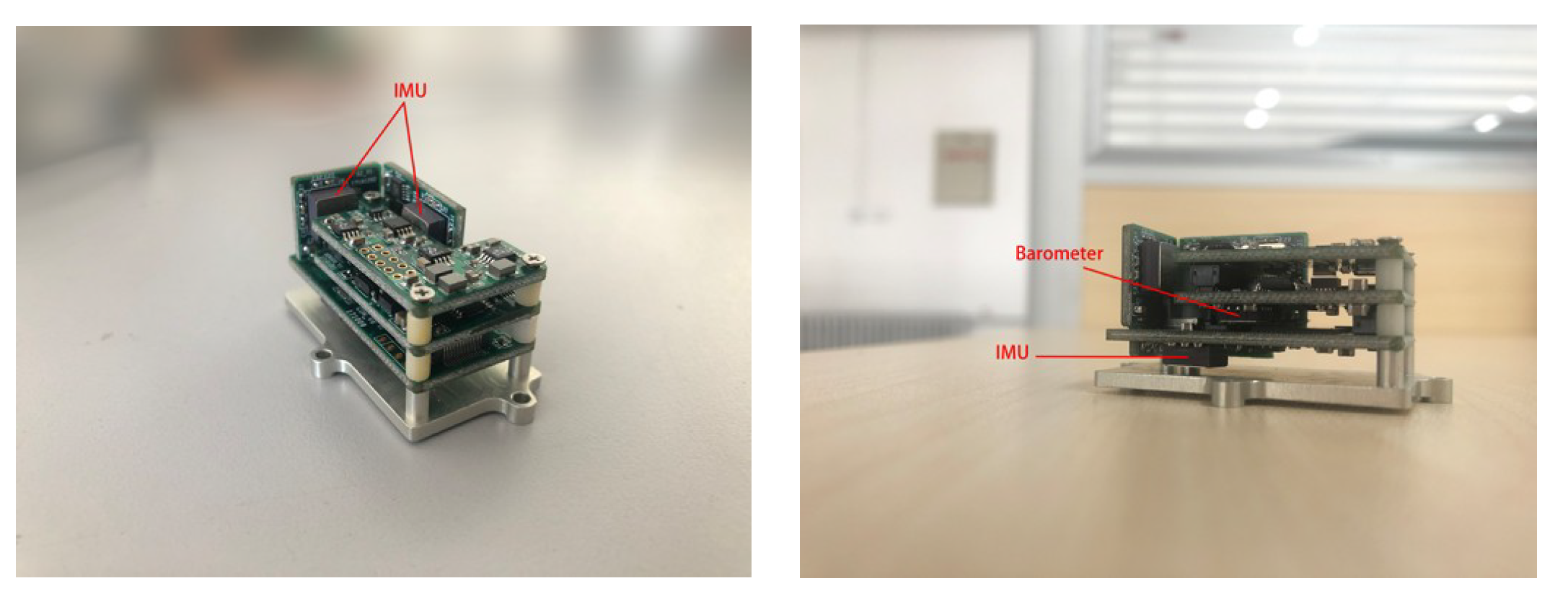
Figure 16.
MEMS (microelectromechanical systems)-IMU, the position of IMU and barometer have been pointed out.
Figure 16.
MEMS (microelectromechanical systems)-IMU, the position of IMU and barometer have been pointed out.
Figure 17.
The results of each sub-classifier. (a) run and other actions with the features and ; (b) walk and dwstairs with the features and ; (c) walk and upstairs with the features and ; (d) dwstairs and upstairs with the features and .
Figure 17.
The results of each sub-classifier. (a) run and other actions with the features and ; (b) walk and dwstairs with the features and ; (c) walk and upstairs with the features and ; (d) dwstairs and upstairs with the features and .
Table 1.
The commonly used features and the calculation method.
Table 1.
The commonly used features and the calculation method.
| Features | Calculation Method |
|---|
| Maximum | |
| Minimum | |
| Mean | |
| Extreme Difference | |
| Variance | |
| Standard Deviation | |
| Root Mean Square | |
| Absolute Value | |
| Signal Amplitude Area | |
| Correlation Coefficient | |
| Interquartile Range | |
| Number of Peaks | The number of peaks in signal () |
| Mean of Peaks | |
Table 2.
Mean and min of standard deviation of each feature of walk.
Table 2.
Mean and min of standard deviation of each feature of walk.
| Feature | STD |
|---|
| Min | Mean |
|---|
| Value | Order |
|---|
| Range | 0.6996 | 0.390 | 1.1189 |
| Standard Deviation (Std) | 0.1494 | 0.453 | 0.1854 |
| Variance (Var) | 0.4785 | 0.453 | 0.6612 |
| Root Mean Square (RMS) | 0.0382 | 0.635 | 0.0387 |
| Interquartile Range (IQR) | 0.2171 | 0.310 | 0.3105 |
| Mean | 0.2799 | 1 | 0.3076 |
| Mean of Peaks (pksMean) | 0.6857 | 0.043 | 1.1725 |
| Number of Peaks (pksNum) | 0.5430 | 0.992 | 2.6806 |
Table 3.
Mean and min of standard deviation of each feature of upstairs.
Table 3.
Mean and min of standard deviation of each feature of upstairs.
| Feature | STD |
|---|
| Min | Mean |
|---|
| Value | Order |
|---|
| Range | 1.9913 | 0.981 | 3.0821 |
| Std | 0.4898 | 0.997 | 0.5659 |
| Var | 2.4833 | 0.428 | 3.1291 |
| RMS | 0.0527 | 0.607 | 0.0535 |
| IQR | 0.3743 | 0.130 | 0.7365 |
| Mean | 0.3249 | 1 | 0.7060 |
| pksMean | 1.9208 | 0.701 | 2.8684 |
| pksNum | 0.5633 | 1 | 2.7401 |
Table 4.
Mean and min of standard deviation of each feature of dwstairs.
Table 4.
Mean and min of standard deviation of each feature of dwstairs.
| Feature | STD |
|---|
| Min | Mean |
|---|
| Value | Order |
|---|
| Range | 0.6453 | 0.400 | 1.2644 |
| Std | 0.1589 | 0.281 | 0.1978 |
| Var | 0.4816 | 0.308 | 0.7028 |
| RMS | 0.0209 | 0.624 | 0.0213 |
| IQR | 0.2369 | 0.212 | 0.3018 |
| Mean | 0.1681 | 1 | 0.2500 |
| pksMean | 0.6681 | 0.194 | 1.3048 |
| pksNum | 0.6485 | 0.997 | 2.9343 |
Table 5.
Mean and min of standard deviation of each feature of run.
Table 5.
Mean and min of standard deviation of each feature of run.
| Feature | STD |
|---|
| Min | Mean |
|---|
| Value | Order |
|---|
| Range | 2.3835 | 0.803 | 3.3444 |
| Std | 0.4612 | 0.168 | 0.5488 |
| Var | 3.6646 | 0.169 | 4.9012 |
| RMS | 0.0783 | 0.663 | 0.0803 |
| IQR | 0.6780 | 0.318 | 0.8944 |
| Mean | 0.6471 | 0.020 | 0.8000 |
| pksMean | 0.9936 | 0.031 | 1.2464 |
| pksNum | 2.8274 | 0.991 | 4.4601 |
Table 6.
Information of the subject.
Table 6.
Information of the subject.
| Project | Value |
|---|
| Age | 24 |
| Weight | 65 kg |
| Position of prosthesis | Left |
| High | 174 cm |
| Gender | M |
Table 7.
Main specifications of devices.
Table 7.
Main specifications of devices.
| Parameters | Main Specifications |
|---|
| Sustainable Working Hours | ≥ 24 h |
| Operating Voltage | 3.3 to 30 V |
| Sustainable Working Temperature | −40 °C to 85 °C |
| Power Consumption | 550 mW@5.0 V |
| Core Circuit Board Dimensions | 33 mm × 20 mm × 22 mm |
| Weight | <100 g |
| Sensing Range | 0° to 360° |
| Static Accuracy | ±0.5° (roll, pitch); ±1° (yaw) |
| Dynamic Accuracy | ±1° RMS |
| Resolution | 0.05° |
| Output Frequency | 0.01 to 100 Hz |
| Sensor | Accelerometer | Gyroscope | Parameters | Barometer |
| Measure range | ±10 g | ±1000°/s | Measure range | 10 to 1200 mbar |
| Nonlinear | <0.2% of FS | <0.1% of FS | Resolution | 10 cm |
| Bias stability | ±4 mg | 9.2°/h | Bias stability | ±1 mbar/year |
Table 8.
Performance of each sub-classifier.
Table 8.
Performance of each sub-classifier.
| Sub-Classifier | b | c | d | e |
|---|
| Accuracy | 0.9505 | 0.9538 | 0.9143 | 0.8939 |
| Precision | 0.7843 | 0.9836 | 0.9836 | 0.9341 |
| Recall | 1 | 0.9326 | 0.8696 | 0.8667 |
| F1–Score | 0.3053 | 0.7018 | 0.7157 | 0.6753 |
Table 9.
Accuracy of each sub-classifier in fractional domain and time domain.
Table 9.
Accuracy of each sub-classifier in fractional domain and time domain.
| Sub-Classifier | Fractional Domain | Time Domain |
|---|
| b | 0.9505 | 0.9011 |
| c | 0.9538 | 0.8259 |
| d | 0.9143 | 0.7424 |
| e | 0.8939 | 0.7629 |




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}