Research on the Disc Sensitive Structure of a Micro Optoelectromechanical System (MOEMS) Resonator Gyroscope

Abstract
:1. Introduction
2. Working Mechanism Analysis of MOEMS-RG
3. Modal Analysis of the MOEMS-RG
3.1. Establishment of the Modal Mathematical Model
3.2. The Modal Simulation Analysis of MOEMS-RG
4. Disc Sensitive Structure Analysis of MOEMS-RG
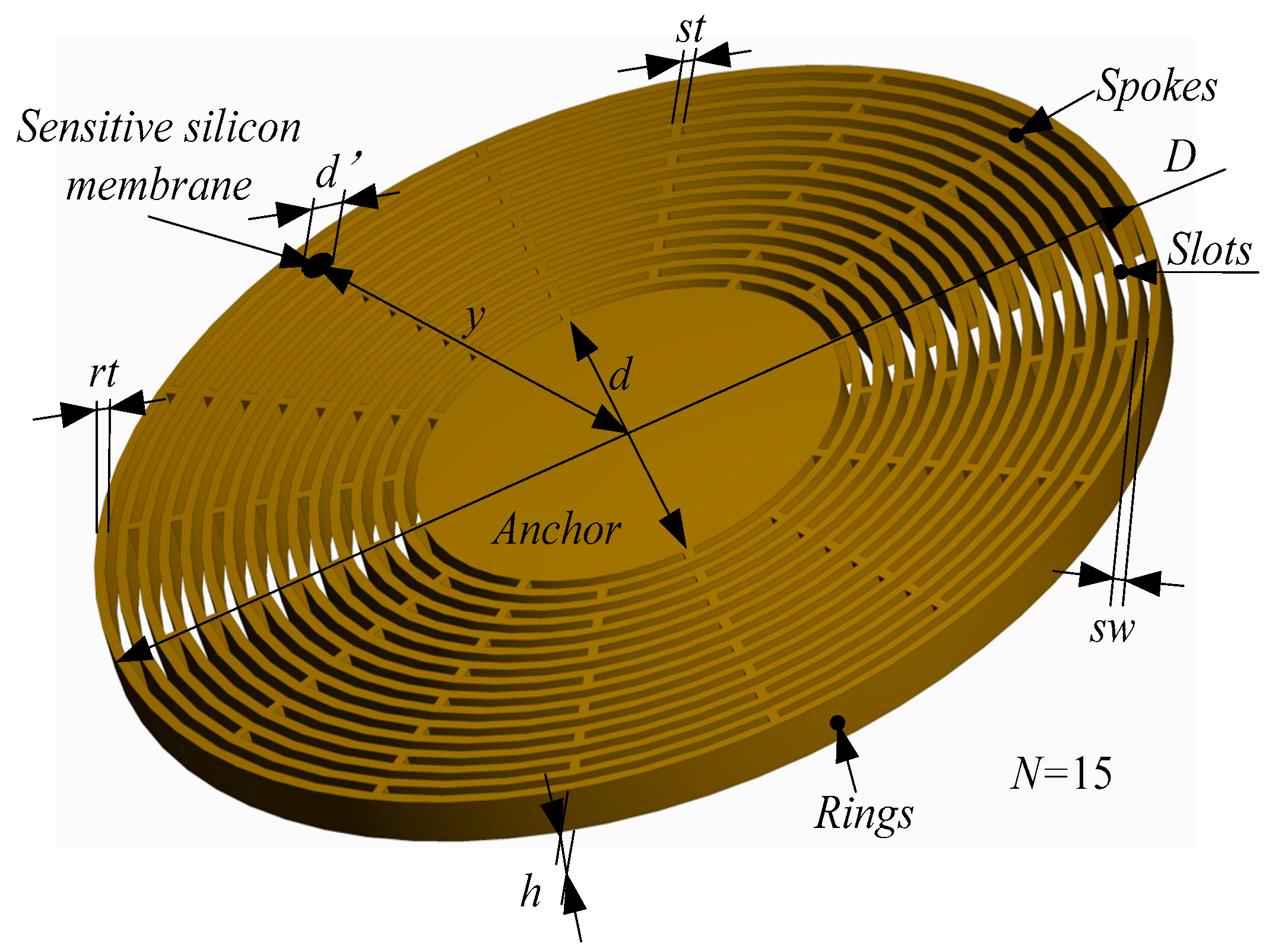
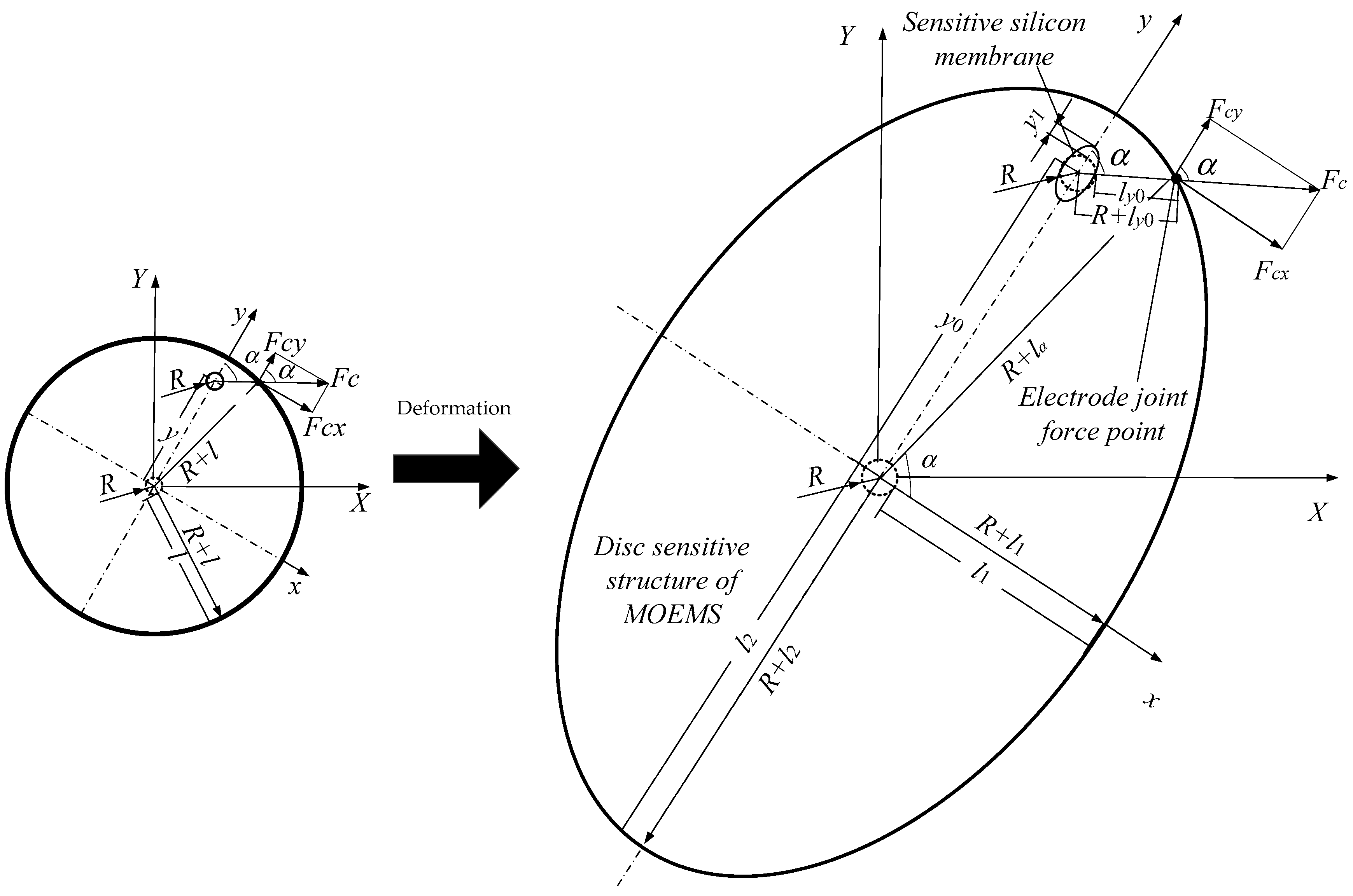
4.1. Disc Sensitive Structure Design of MOEMS-RG
4.2. Mathematical Modal Analysis of the MOEMS-RG
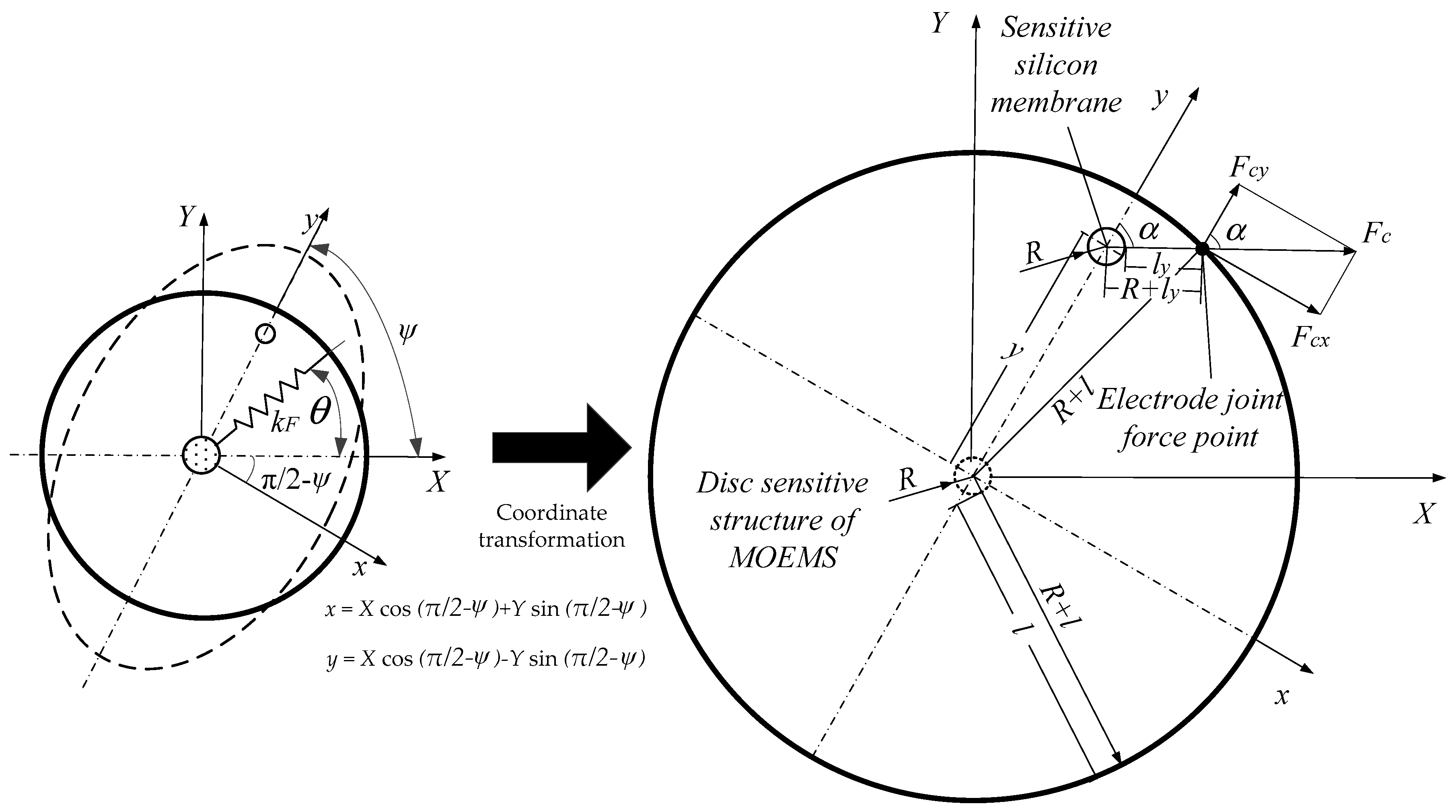
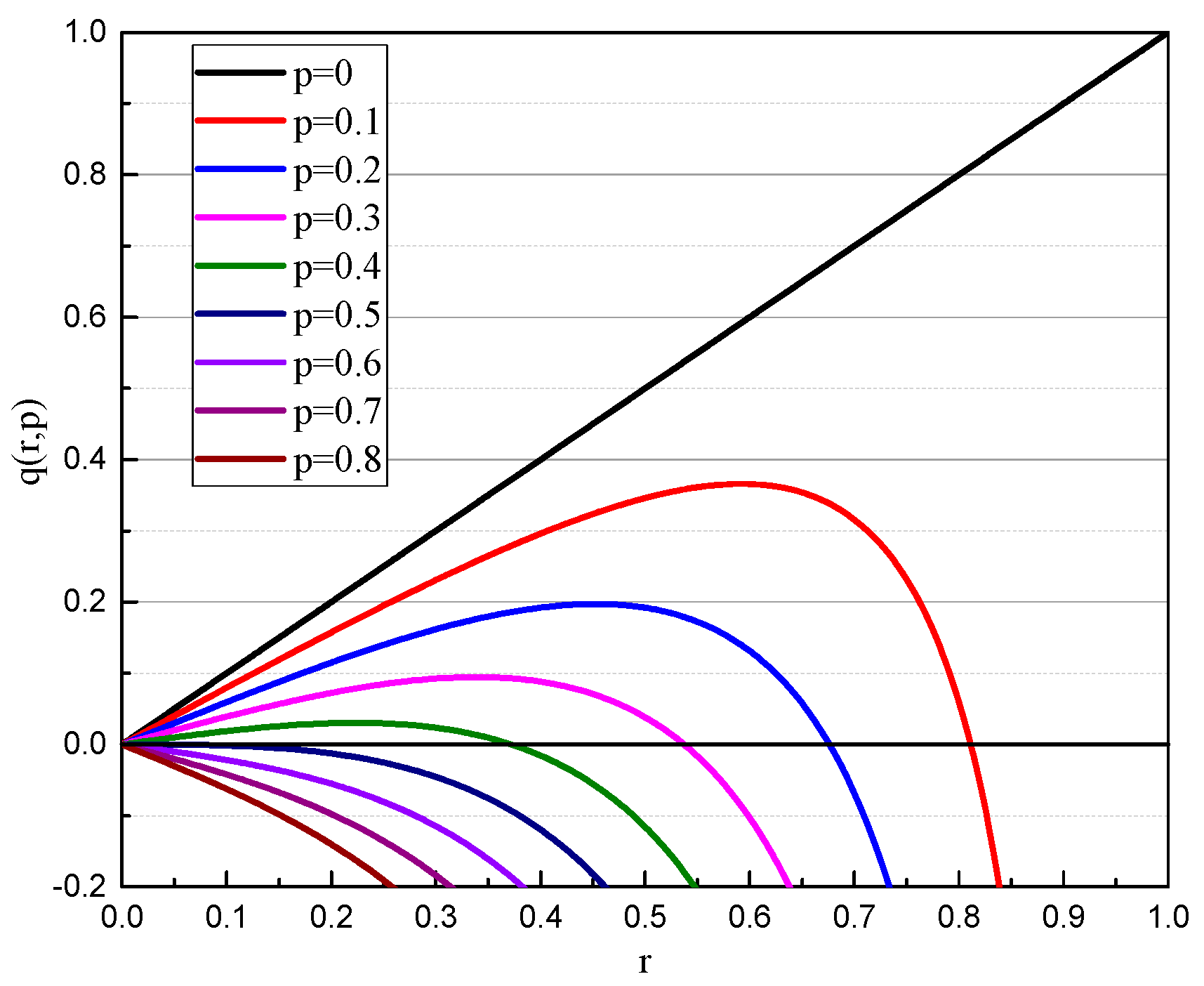
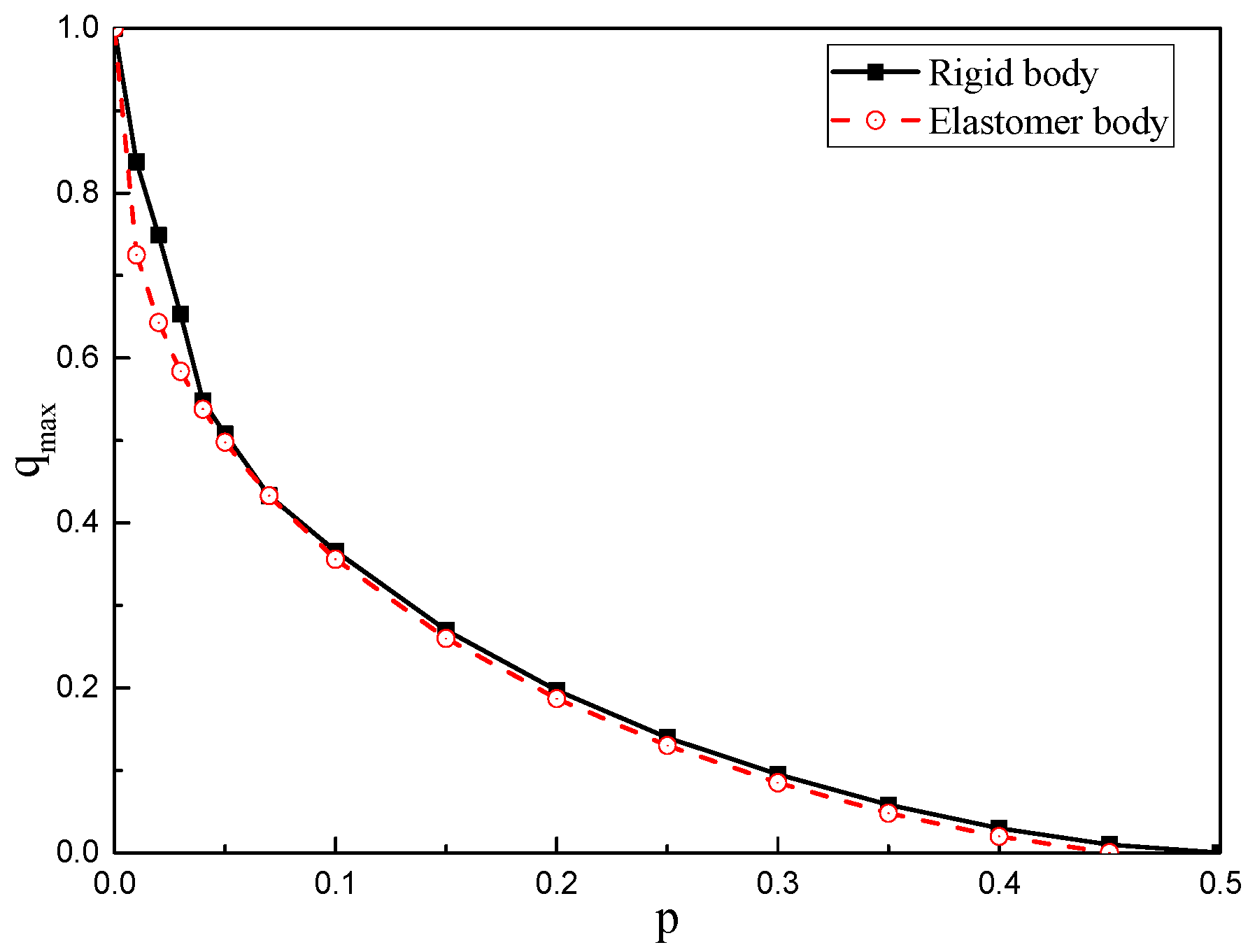
4.2.1. Mathematical Modal Analysis of a Rigid Body
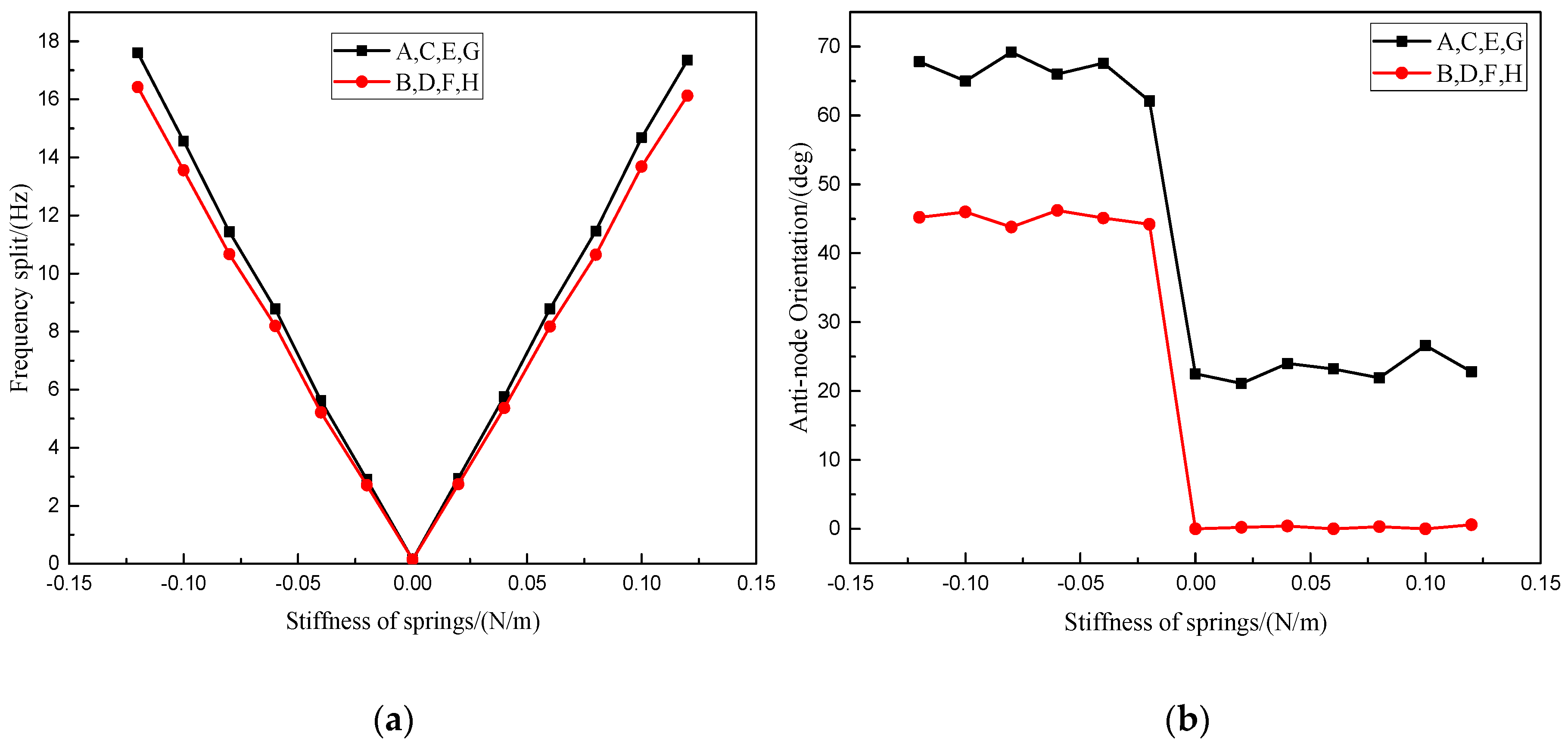
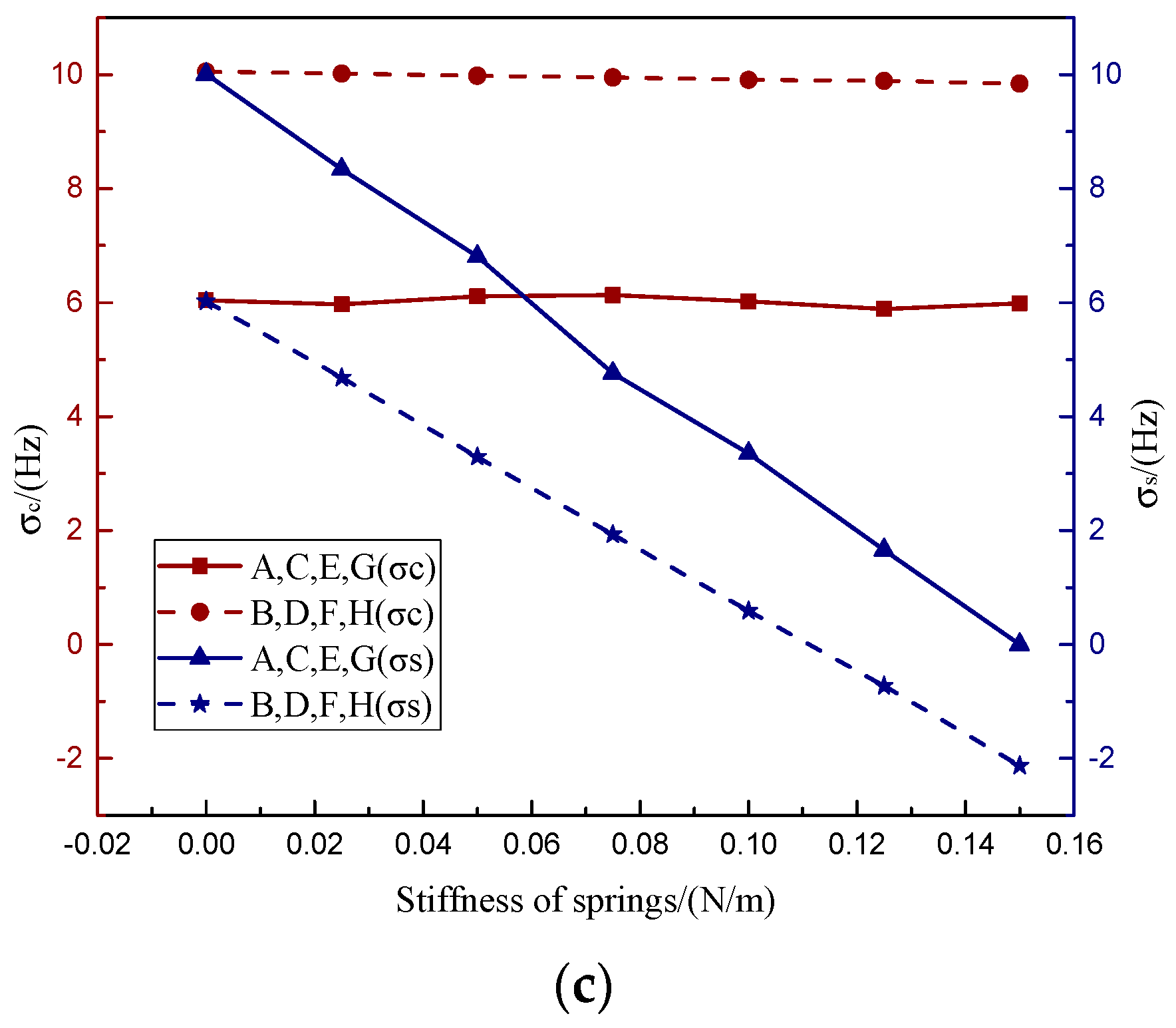
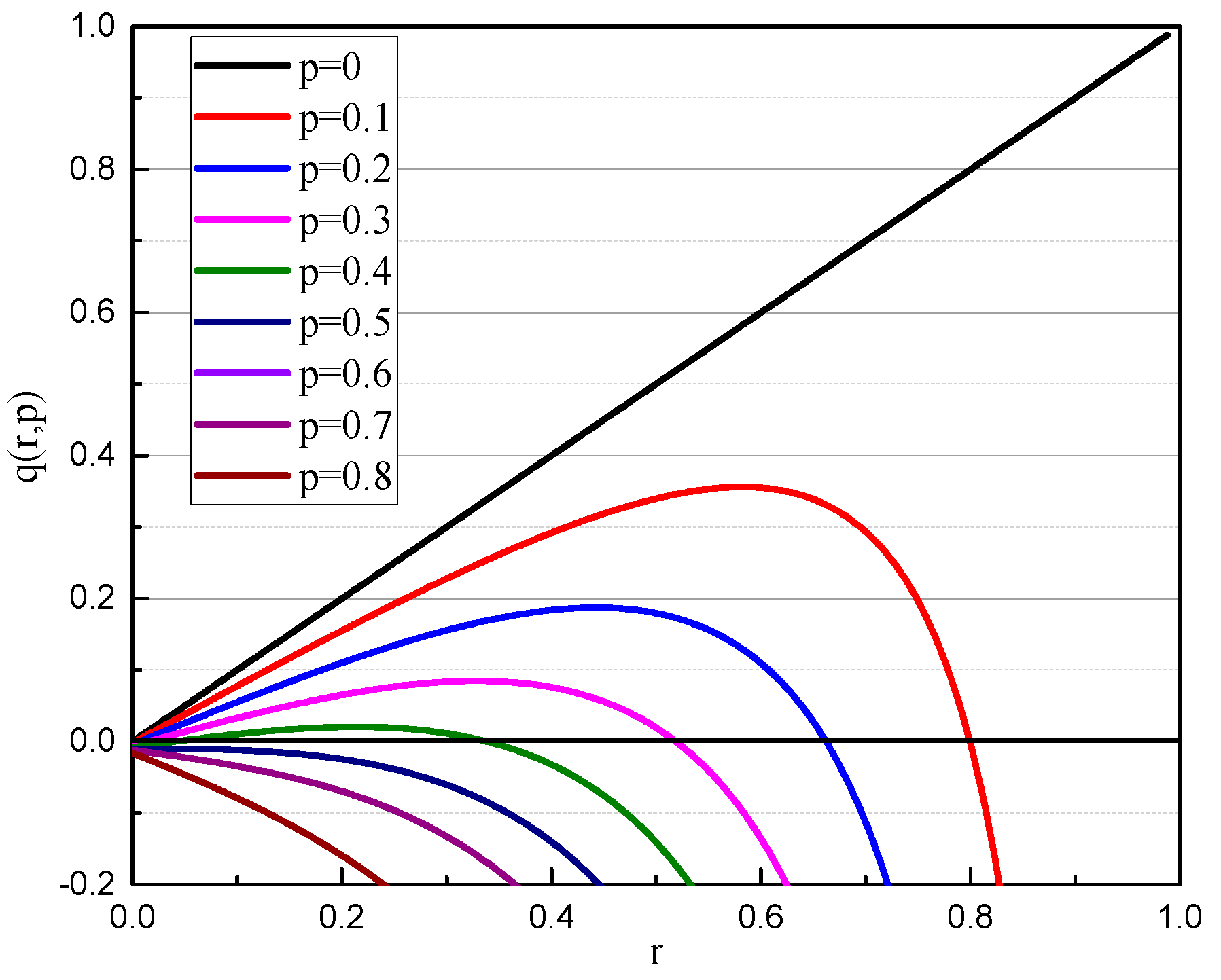
4.2.2. Mathematical Modal Analysis of an Elastomer Body
5. Structural Simulation Analysis of the MOEMS-RG
5.1. Mechanical Sensitivity and Transducer Sensitivity Model of MOEMS-RG
5.2. Varying Structural Parameters Simulation Analysis of the MOEMS-RG
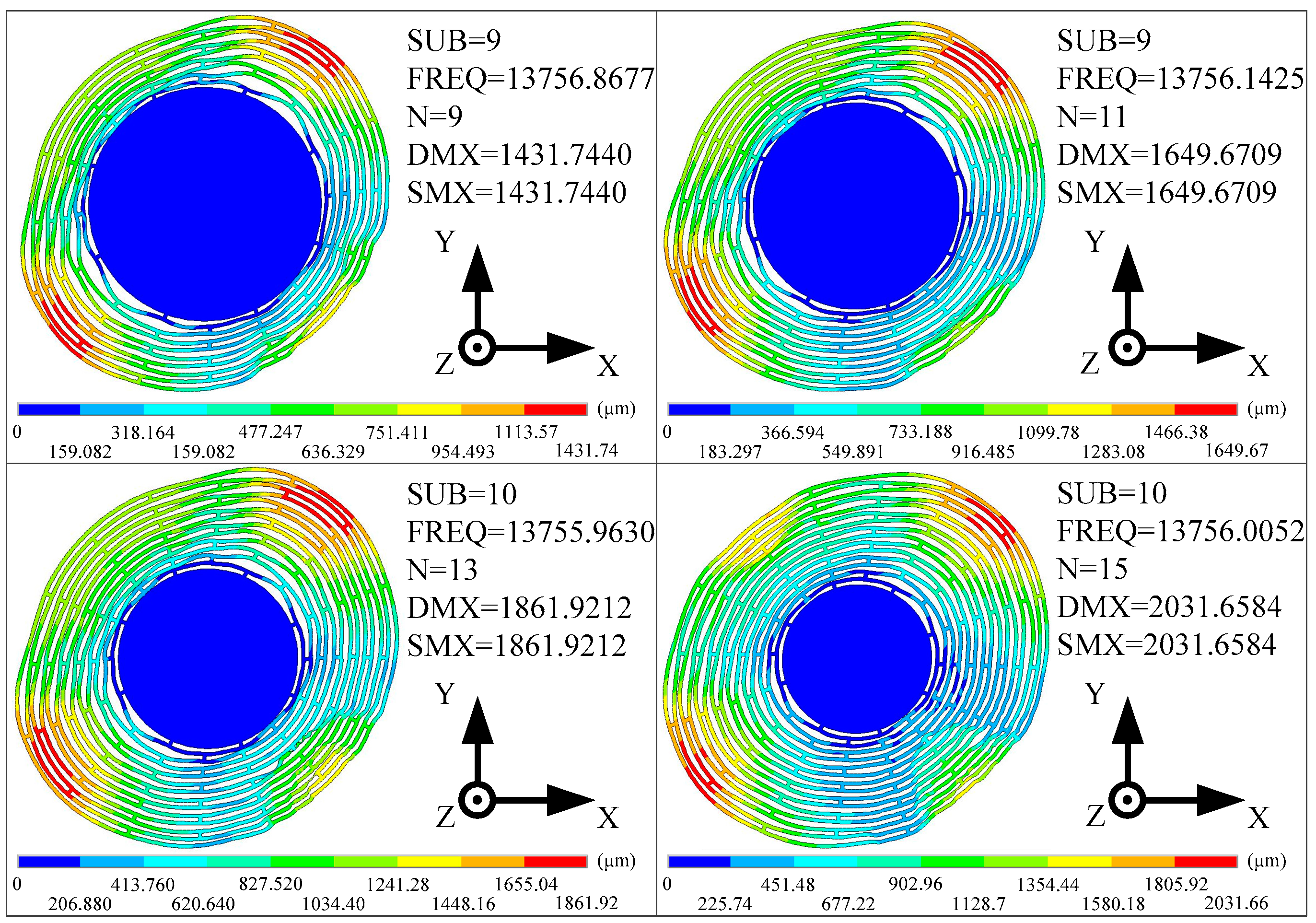
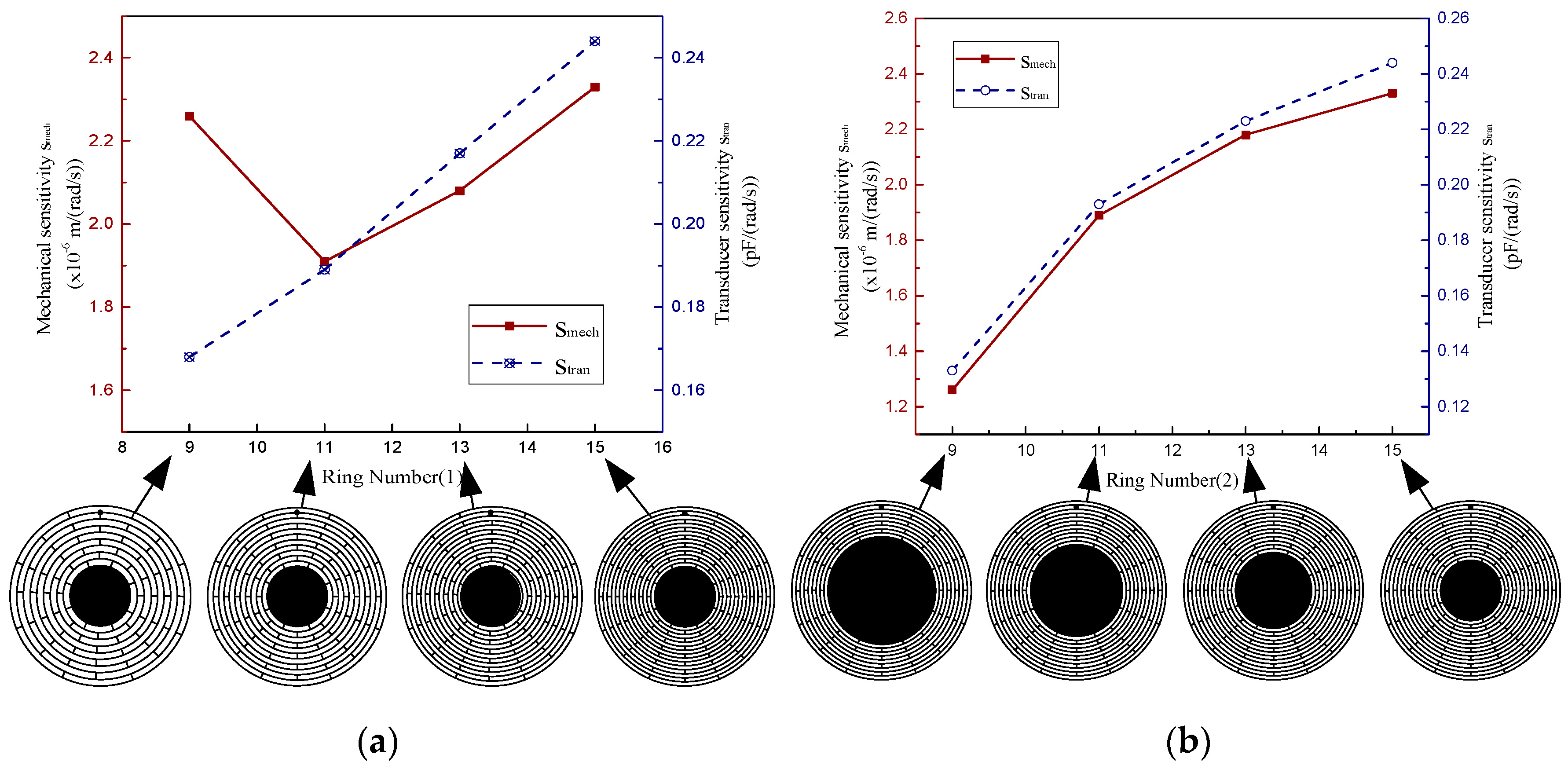
5.2.1. The Ring Number
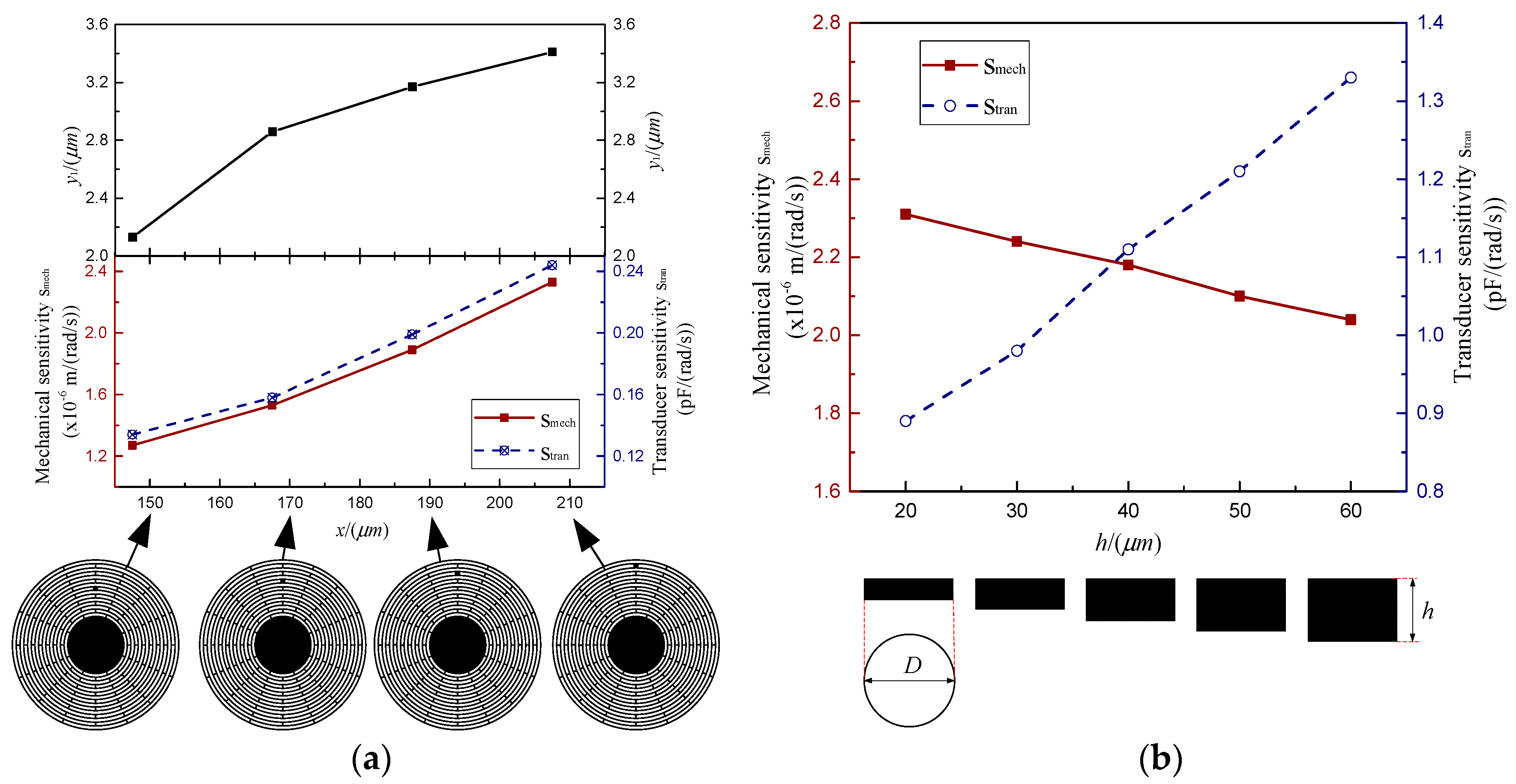
5.2.2. The Offset Distance of the Sensitive Membrane
5.2.3. The height of the MOEMS-RG
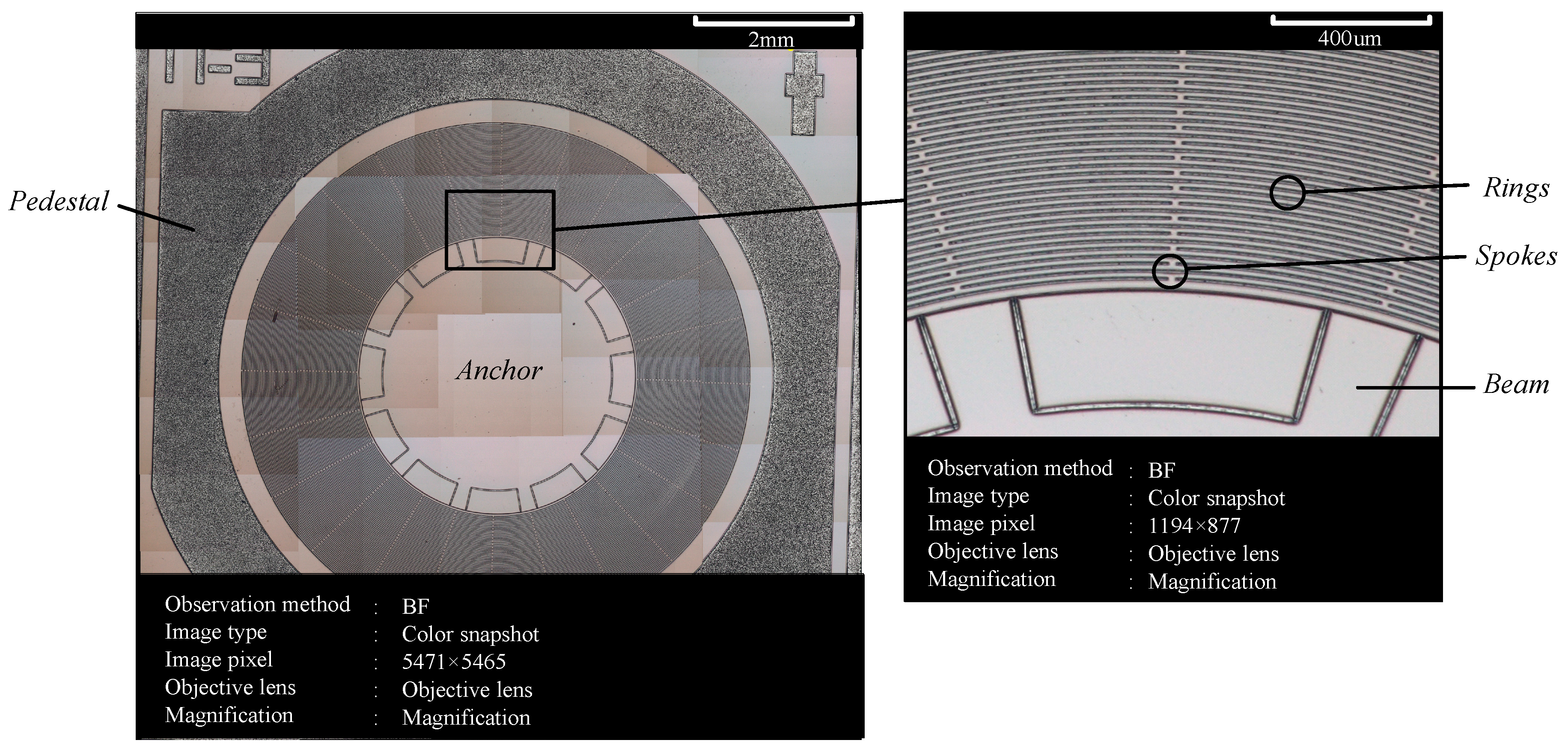
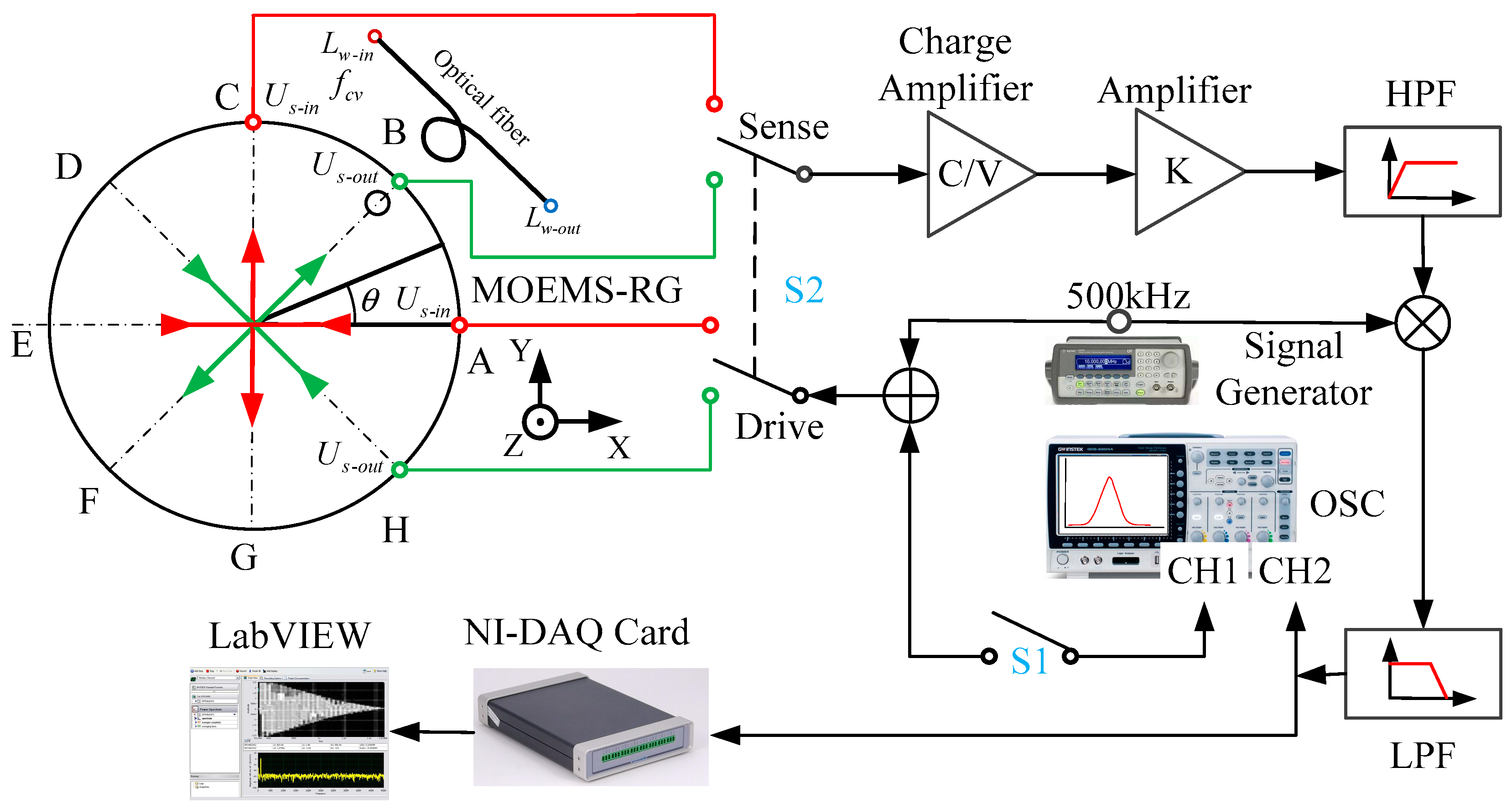
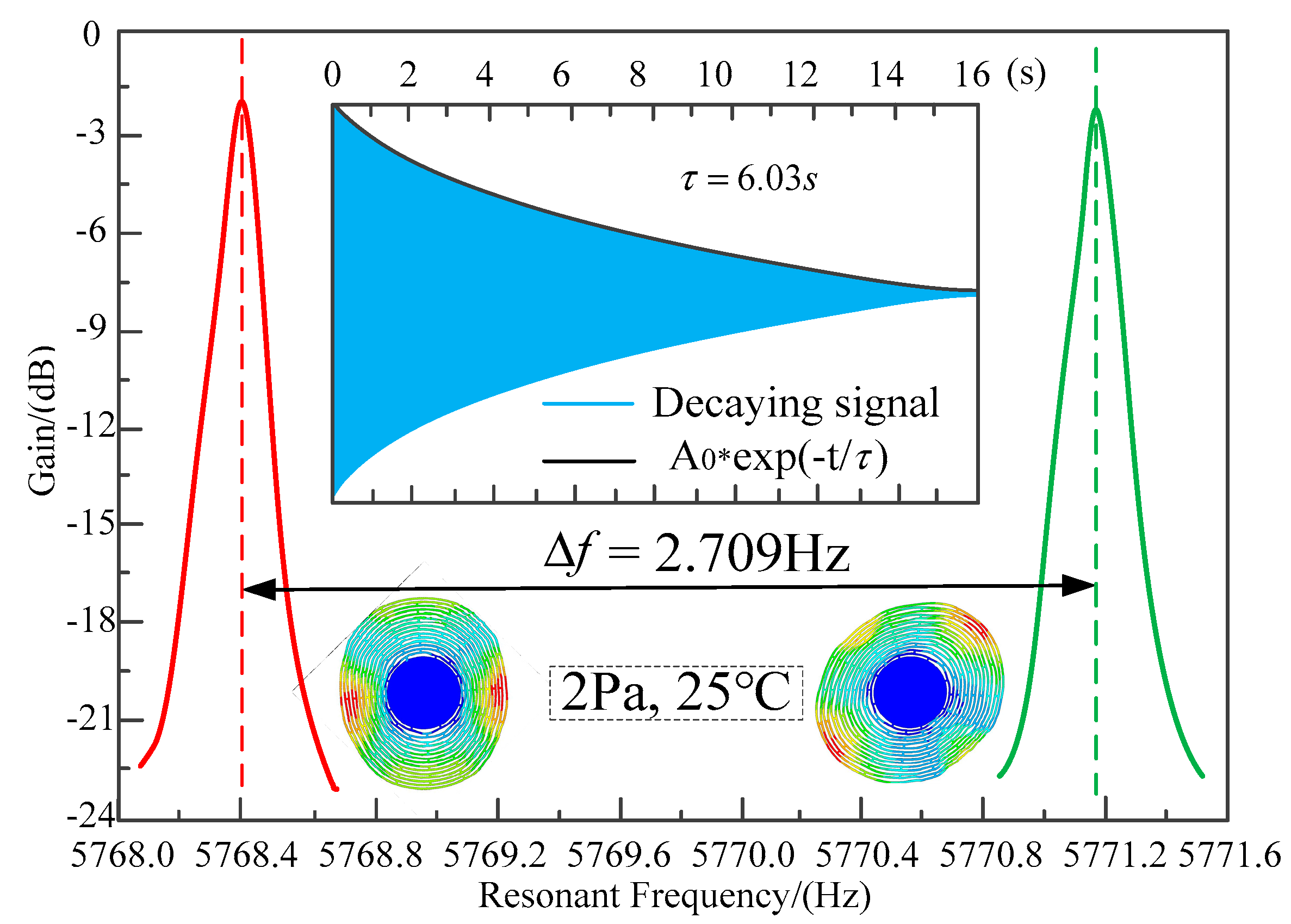
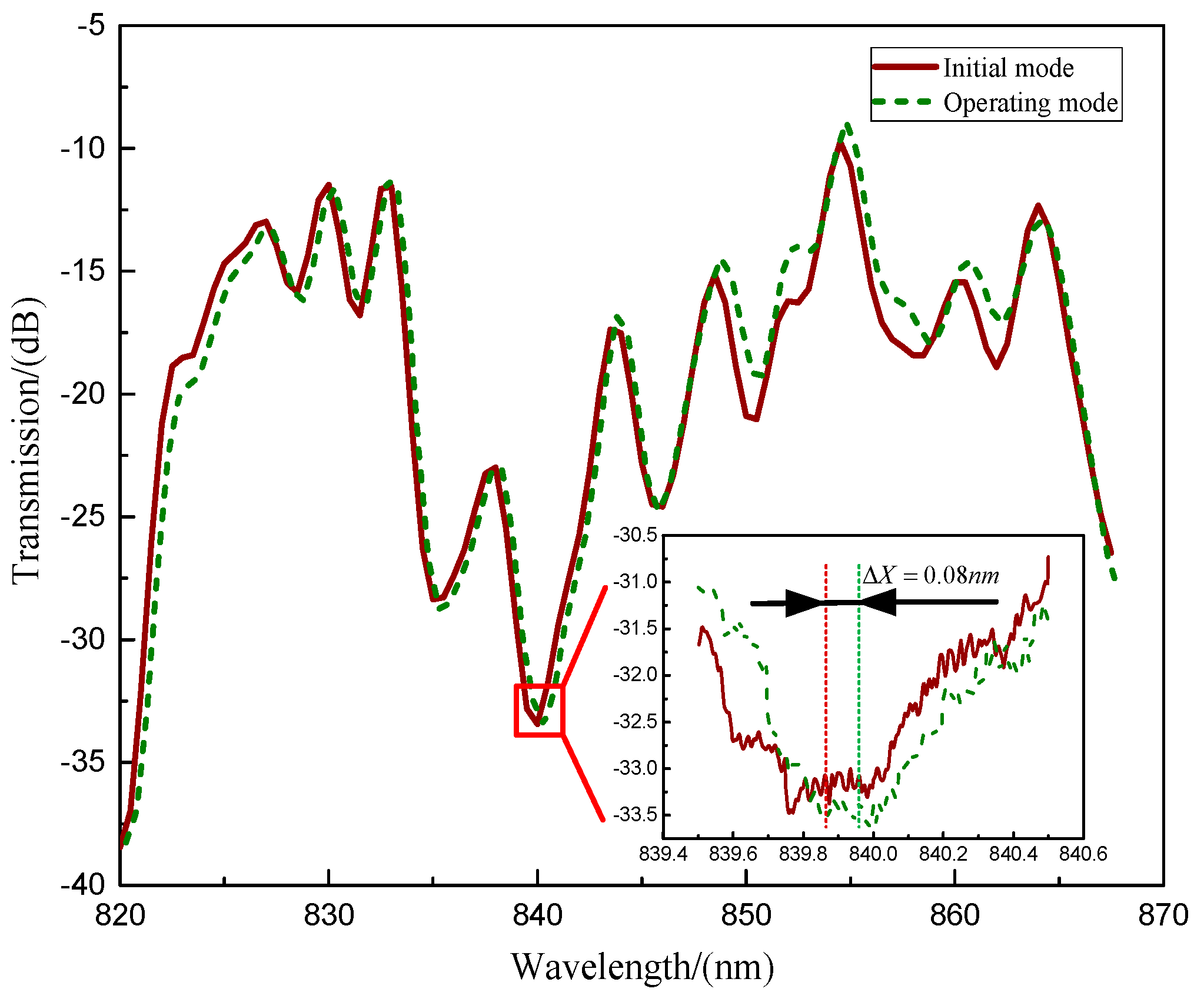
6. Experiment Test of the MOEMS-RG
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mineta, T.; Kobayashi, S.; Watanabe, Y. Three axis capacitive accelerometer with uniform axial sensitivities. J. Micromech. Microeng. 1996, 6, 431–435. [Google Scholar] [CrossRef]
- Xia, D.; Yu, C.; Kong, L. The Development of Micromachined Gyroscope Structure and Circuitry Technology. Sensors 2014, 14, 1394–1473. [Google Scholar] [CrossRef] [Green Version]
- Pieri, F.; Cilea, A. A Fast Multiobjective Optimization Strategy for Single-Axis Electromagnetic MOEMS Micromirrors. Micromachines 2018, 9, 2. [Google Scholar] [CrossRef]
- Zamkotsian, F.; Lanzoni, P.; Barette, R.; Helmbrecht, M.; Marchis, F.; Teichman, A. Operation of a MOEMS Deformable Mirror in Cryo: Challenges and Results. Micromachines. 2017, 8, 233. [Google Scholar] [CrossRef] [PubMed]
- Challoner, A.D.; Ge, H.H.; Liu, J.Y. Boeing disc resonator gyroscope. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 504–514. [Google Scholar]
- Rourke, A.K.; McWilliam, S.; Fox, C.H.J. Multi-mode trimming of imperfect rings using masses at pre-selected locations. J. Sound Vib. 2002, 256, 319–345. [Google Scholar] [CrossRef]
- Gallacher, B.J.; Hedley, J.; Burdess, J.S.; Harris, A.J.; McNie, M.E. Multimodal tuning of a vibrating ring using laser ablation. Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci. 2003, 217, 557–576. [Google Scholar] [CrossRef]
- Bernstein, J.; Bancu, M.; Cook, E.; Henry, T.; Kwok, P.; Nyinjee, T.; Perlin, G.; Teynor, B.; Weinberg, M. Diamond hemispherical resonator fabrication by isotropic glass etch. In Proceedings of the Solid-State Sensors, Actuators, Microsystems Workshop, Hilton Head Island, SC, USA, 8–12 June 2014; pp. 273–276. [Google Scholar]
- Schwartz, D.M.; Kim, D.; Stupar, P.; DeNatale, J.; M’Closkey, R.T. Modal parameter tuning of an axisymmetric resonator via mass perturbation. J. Microelectromech. Syst. 2015, 24, 545–555. [Google Scholar] [CrossRef]
- Fox, C.H.J. A simple theory for the analysis and correction of frequency splitting in slightly imperfect rings. J. Sound Vib. 1990, 142, 227–243. [Google Scholar] [CrossRef]
- Allaei, D.; Soedel, W.; Yang, T.Y. Natural frequencies and modes of rings that deviate from perfect axisymmetry. J. Sound Vib. 1986, 111, 9–27. [Google Scholar] [CrossRef]
- McWilliam, S.; Ong, J.; Fox, C.H.J. On the statistics of natural frequency splitting for rings with random mass imperfections. J. Sound Vib. 2005, 279, 453–470. [Google Scholar] [CrossRef]
- Bisegna, P.; Caruso, G. Frequency split and vibration localization in imperfect rings. J. Sound Vib. 2007, 306, 691–711. [Google Scholar] [CrossRef]
- Papadimitriou, C.; Papadioti, D.C. Component mode synthesis techniques for finite element model updating. Comput. Struct. 2013, 126, 15–28. [Google Scholar] [CrossRef]
- Ahn, C.H.; Ng, E.J.; Hong, V.A.; Yang, Y.; Lee, B.J.; Flader, I.; Kenny, T.W. Mode-Matching of Wineglass Mode Disk Resonator Gyroscope in (100) Single Crystal Silicon. J. Microelectromech. Syst. 2015, 24, 343–350. [Google Scholar] [CrossRef]
- Li, Q.; Xiao, D.; Zhou, X.; Hou, Z.; Zhuo, M.; Xu, Y.; Wu, X. Dynamic Modeling of the Multiring Disk Resonator Gyroscope. Micromachines 2019, 10, 181. [Google Scholar] [CrossRef]
- Esmaeili, M.; Durali, M.; Jalili, N. Ring microgyroscope modeling and performance evaluation. Micro-Electro-Mech. Syst. 2005, 7, 241–247. [Google Scholar]
- Esmaeili, M.; Jalili, N.; Durali, M. Dynamic modeling and performance evaluation of a vibrating microgyroscope under general support motion. J. Sound Vib. 2005, 287, 596–610. [Google Scholar] [CrossRef]
- Wu, X.H.; Parker, R.G. Vibration of rings on a general elastic foundation. J. Sound Vib. 2006, 295, 194–213. [Google Scholar] [CrossRef]
- Asokanthan, S.F.; Cho, J. Dynamic stability of ring-based angular rate sensors. J. Sound Vib. 2006, 295, 572–583. [Google Scholar] [CrossRef]
- Gallacher, B.J.; Hedley, J.; Burdess, J.S.; Harris, A.J.; Rickard, A.; King, D.O. Electrostatic correction of structural imperfections present in a microring gyroscope. J. Microelectromech. Syst. 2005, 14, 221–234. [Google Scholar] [CrossRef]
- Charmet, J.; Michaels, T.C.T.; Daly, R.; Prasad, A.; Thiruvenkathanathan, P.; Langley, R.S.; Knowles, T.P.J.; Seshia, A.A. Quantifying measurement fluctuations from stochastic surface processes on sensors with heterogeneous sensitivity. Phys. Rev. Appl. 2016, 5, 602–608. [Google Scholar] [CrossRef]
- Nitzan, S.H.; Zega, V.; Li, M.; Ahn, C.H.; Corigliano, A.; Kenny, T.W.; Horsley, D.A. Self-induced parametric amplification arising from nonlinear elastic coupling in a micromechanical resonating disk gyroscope. Sci. Rep. 2015, 5, 9036. [Google Scholar] [CrossRef] [Green Version]
- Darvishian, A.; Shiari, B.; Cho, J.Y.; Nagourney, T.; Najafi, K. Anchor Loss in Hemispherical Shell Resonators. J. Microelectromech. Syst. 2017, 26, 51–66. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, Y.; Xiao, D.; Hou, Z.; Li, Q.; Yu, D.; Wu, X. An investigation on the ring thickness distribution of disk resonator gyroscope with high mechanical sensitivity. Int. J. Mech. Sci. 2016, 117, 174–181. [Google Scholar] [CrossRef]
- Ahn, C.H.; Nitzan, S.; Ng, E.J.; Hong, V.A.; Yang, Y.; Kimbrell, T.; Horsley, D.A.; Kenny, T.W. Encapsulated high frequency (235 kHz), high-Q (100 k) disk resonator gyroscope with electrostatic parametric pump. Appl. Phys. Lett. 2014, 105, 243504. [Google Scholar] [CrossRef]
- Senkal, D.; Ahamed, M.J.; Ardakanim, M.H.A.; Askari, S.; Shkel, A.M. Demonstration of 1 Million Q-Factor on Microglassblown Wineglass Resonators with Out-of-Plane Electrostatic Transduction. J. Microelectromechan. Syst. 2015, 24, 29–37. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ω/Hz | ψ1/deg | σc/Hz | σs/Hz |
|---|---|---|---|
| 11.7328 | 7.6335 | 10.9182 | 5.9218 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| D | 450 (μm) | st | 5 (μm) |
| d | 150 (μm) | rt | 5 (μm) |
| d’ | 15 (μm) | sw | 5 (μm) |
| h | 40 (μm) | Number of rings N | 15 |
| y | 207.5 (μm) | Number of spokes Ns | 16 |
| Character 1 | MOEMS-RG |
|---|---|
| 13,756.005 Hz | |
| Q(2Pa) | 71,500 |
| τ(2Pa) | 1.705s |
| 0.47mg | |
| γ | 0.37 mg |
| 2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, X.; Zhao, L.; Xia, D. Research on the Disc Sensitive Structure of a Micro Optoelectromechanical System (MOEMS) Resonator Gyroscope. Micromachines 2019, 10, 264. https://doi.org/10.3390/mi10040264
Shen X, Zhao L, Xia D. Research on the Disc Sensitive Structure of a Micro Optoelectromechanical System (MOEMS) Resonator Gyroscope. Micromachines. 2019; 10(4):264. https://doi.org/10.3390/mi10040264
Chicago/Turabian StyleShen, Xiang, Liye Zhao, and Dunzhu Xia. 2019. "Research on the Disc Sensitive Structure of a Micro Optoelectromechanical System (MOEMS) Resonator Gyroscope" Micromachines 10, no. 4: 264. https://doi.org/10.3390/mi10040264