Automatic Micro-Robotic Identification and Electrical Characterization of Graphene


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Automatic Flake Recognition
2.2. Automatic Characterization Approaches
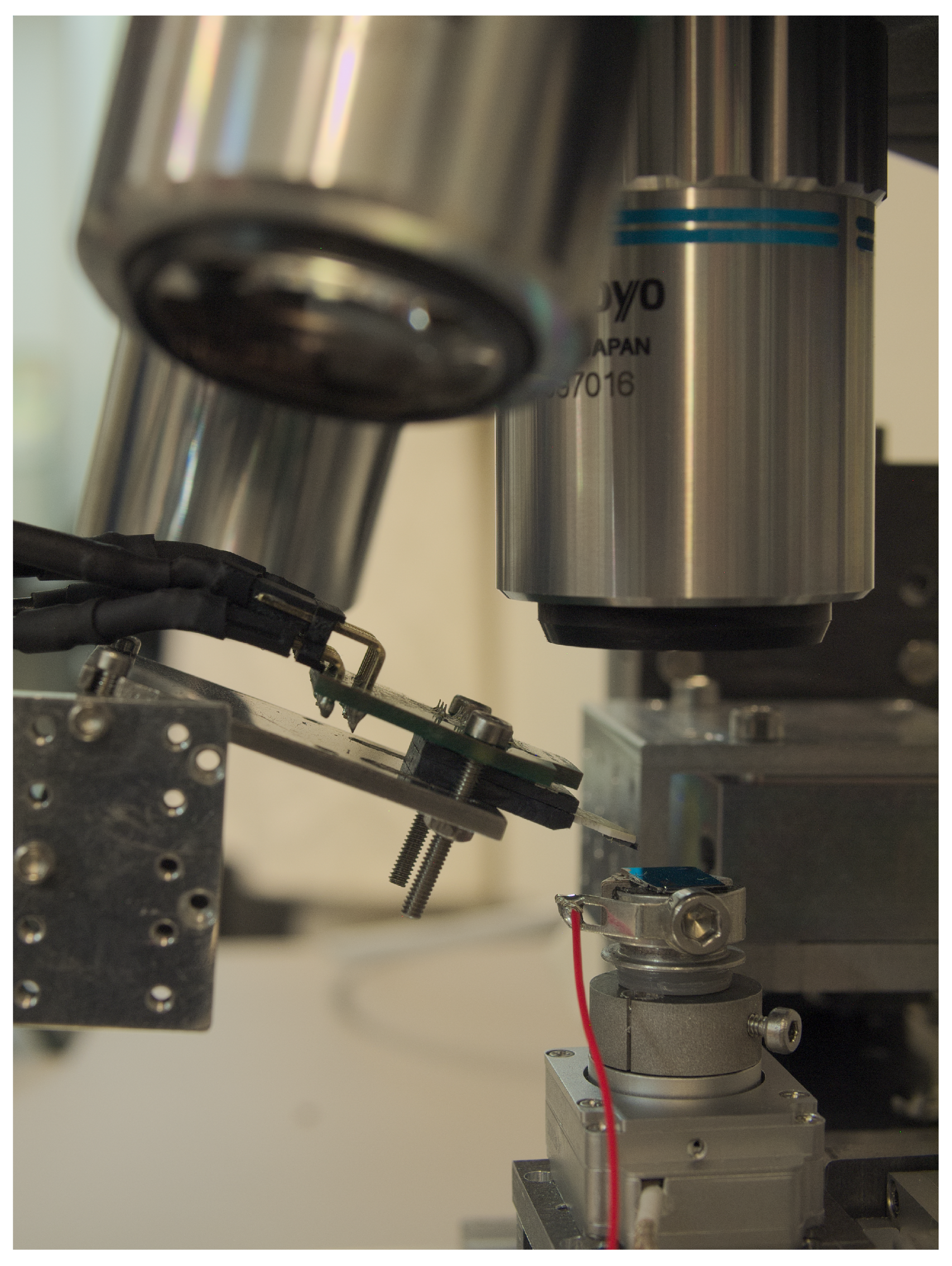
2.3. Nanorobotic Platform
3. Results and Discussion
3.1. Calibration
3.1.1. Substrate ROI
3.1.2. Focus Plane
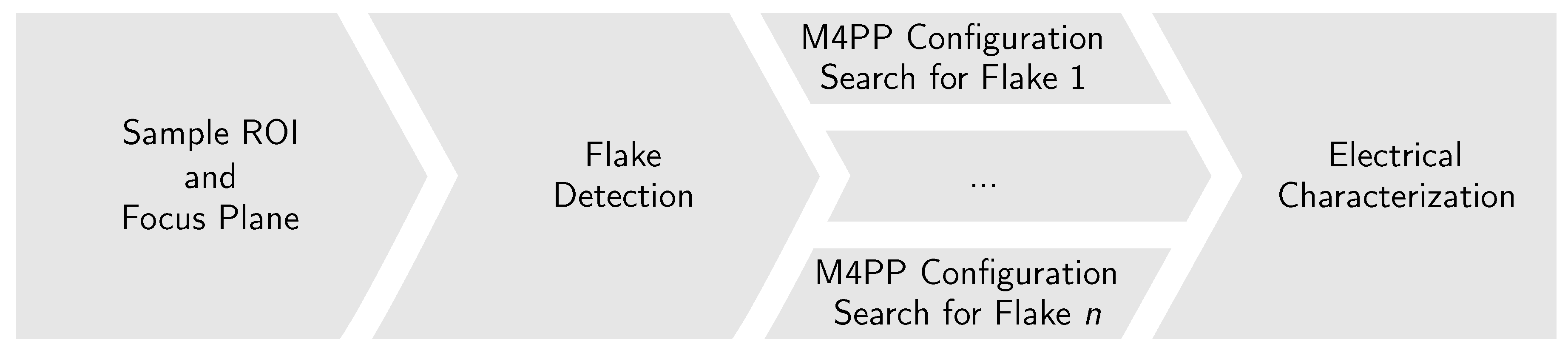
3.2. Sample Scanning
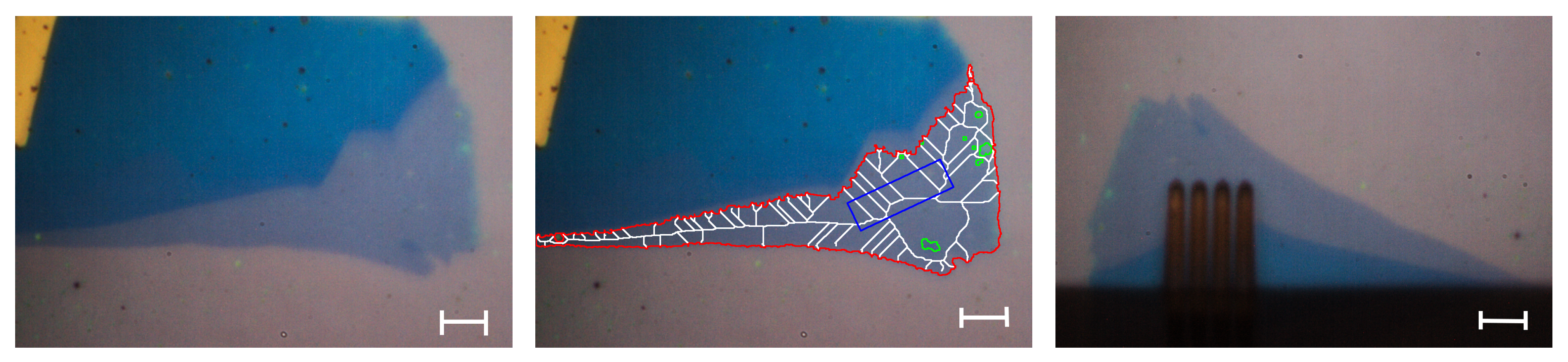
3.2.1. Flake Detection
3.2.2. M4PP Configuration Search
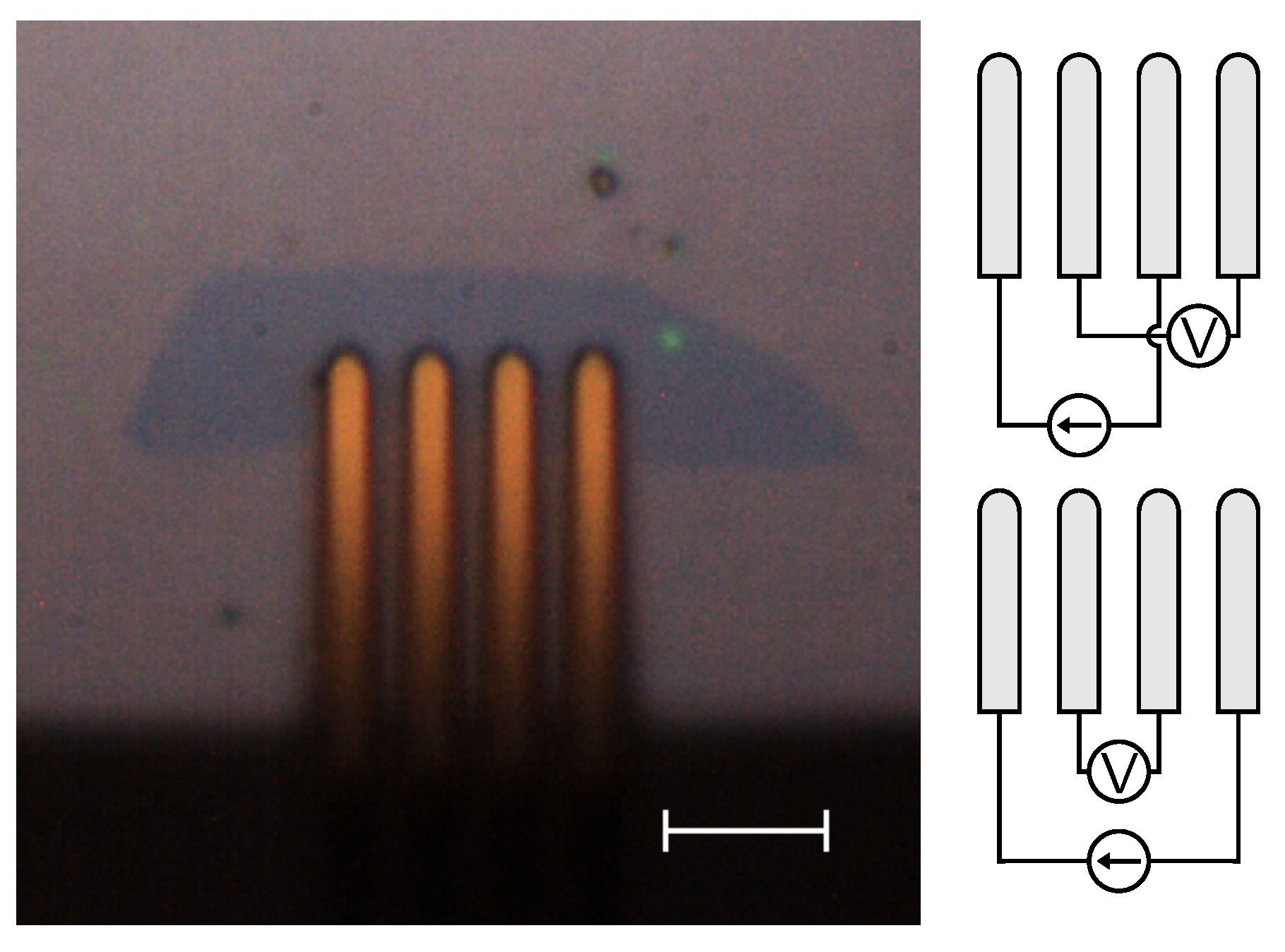
3.3. Four Point Probe Electrical Characterization
3.3.1. Van der Pauw
3.3.2. Centering and Approximation
3.4. Automation Runtimes
3.5. Validation
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| HSV | Hue, Saturation, and Value |
| M4PP | Micro Four Point Probe |
| ROI | Region of Interest |
References
- Bonaccorso, F.; Colombo, L.; Yu, G.; Stoller, M.; Tozzini, V.; Ferrari, A.C.; Ruoff, R.S.; Pellegrini, V. Graphene, related two-dimensional crystals, and hybrid systems for energy conversion and storage. Science 2015, 347, 1246501. [Google Scholar] [CrossRef] [PubMed]
- Geim, A.K.; Novoselov, K.S. The rise of graphene. Nat. Mater. 2007, 6, 183–191. [Google Scholar] [CrossRef] [PubMed]
- Algara-Siller, G.; Lehtinen, O.; Turchanin, A.; Kaiser, U. Dry-cleaning of graphene. Appl. Phys. Lett. 2014, 104, 153115. [Google Scholar] [CrossRef] [Green Version]
- Obraztsov, A.N. Chemical vapour deposition: Making graphene on a large scale. Nat. Nanotechnol. 2009, 4, 212–213. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Jang, S.K.; Jang, W.J.; Kim, M.; Park, S.Y.; Kim, S.W.; Kahng, S.J.; Choi, J.Y.; Ruoff, R.S.; Song, Y.J.; et al. A Platform for large-scale graphene electronics–CVD growth of single-layer graphene on CVD-grown hexagonal boron nitride. Adv. Mater. 2013, 25, 2746–2752. [Google Scholar] [CrossRef] [PubMed]
- Deokar, G.; Avila, J.; Razado-Colambo, I.; Codron, J.L.; Boyaval, C.; Galopin, E.; Asensio, M.C.; Vignaud, D. Towards high quality CVD graphene growth and transfer. Carbon 2015, 89, 82–92. [Google Scholar] [CrossRef]
- Nolen, C.M.; Denina, G.; Teweldebrhan, D.; Bhanu, B.; Balandin, A.A. High-throughput large-area automated identification and quality control of graphene and few-layer graphene films. ACS Nano 2011, 5, 914–922. [Google Scholar] [CrossRef] [PubMed]
- Jessen, B.S.; Klarskov, M.B.; Tschammer, L.K.; Booth, T.J.; Bøggild, P. Automatic Identification of Single-And/Or Few-Layer Thin-Film Material. U.S. Patent 9,251,601, 2 February 2016. [Google Scholar]
- Klarskov, M.B.; Dam, H.F.; Petersen, D.H.; Hansen, T.M.; Löwenborg, A.; Booth, T.; Schmidt, M.S.; Lin, R.; Nielsen, P.; Bøggild, P. Fast and direct measurements of the electrical properties of graphene using micro four-point probes. Nanotechnology 2011, 22, 445702. [Google Scholar] [CrossRef] [PubMed]
- Gao, L.; Ren, W.; Li, F.; Cheng, H.M. Total color difference for rapid and accurate identification of graphene. ACS Nano 2008, 2, 1625–1633. [Google Scholar] [CrossRef] [PubMed]
- Zimmermann, S.; van Duellen, A.; Wieghaus, M.; Garnica Barragán, S.A.; Fatikow, S. Resist-free processing of graphene merging optical imaging and classification with scanning probe lithography. Int. J. Optomechatron. 2016, 10, 97–109. [Google Scholar] [CrossRef] [Green Version]
- Zimmermann, S.; Barragan, S.A.G.; Fatikow, S. Nanorobotic processing of graphene: A platform tailored for rapid prototyping of graphene-based devices. IEEE Nanotechnol. Mag. 2014, 8, 14–19. [Google Scholar] [CrossRef]
- Buron, J.D.; Petersen, D.H.; Bøggild, P.; Cooke, D.G.; Hilke, M.; Sun, J.; Whiteway, E.; Nielsen, P.F.; Hansen, O.; Yurgens, A.; et al. Graphene conductance uniformity mapping. Nano Lett. 2012, 12, 5074–5081. [Google Scholar] [CrossRef] [PubMed]
- Boggild, P.; Mackenzie, D.M.A.; Whelan, P.; Petersen, D.H.; Buron, J.C.D.; Zurutuza, A.; Gallop, J.C.; Hao, L.; Jepsen, P.U. Mapping the electrical properties of large-area graphene. 2D Mater. 2017, 4. [Google Scholar] [CrossRef] [Green Version]
- Williams, L.F., Jr. A modification to the half-interval search (binary search) method. In Proceedings of the 14th Annual Southeast Regional Conference, Birmingham, AL, USA, 22–24 April 1976; ACM: New York, NY, USA, 1976; pp. 95–101. [Google Scholar] [CrossRef]
- Smith, A.R. Color gamut transform pairs. SIGGRAPH Comput. Graph. 1978, 12, 12–19. [Google Scholar] [CrossRef]
- Zhang, T.; Suen, C.Y. A fast parallel algorithm for thinning digital patterns. Commun. ACM 1984, 27, 236–239. [Google Scholar] [CrossRef]
- Smits, F. Measurement of sheet resistivities with the four-point probe. Bell Labs Tech. J. 1958, 37, 711–718. [Google Scholar] [CrossRef]
- Rymaszewski, R. Relationship between the correction factor of the four-point probe value and the selection of potential and current electrodes. J. Phys. E Sci. Instrum. 1969, 2, 170. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garnica B., S.A.; Knaust, M.; Fatikow, S. Automatic Micro-Robotic Identification and Electrical Characterization of Graphene. Micromachines 2019, 10, 870. https://doi.org/10.3390/mi10120870
Garnica B. SA, Knaust M, Fatikow S. Automatic Micro-Robotic Identification and Electrical Characterization of Graphene. Micromachines. 2019; 10(12):870. https://doi.org/10.3390/mi10120870
Chicago/Turabian StyleGarnica B., Sergio A., Marius Knaust, and Sergej Fatikow. 2019. "Automatic Micro-Robotic Identification and Electrical Characterization of Graphene" Micromachines 10, no. 12: 870. https://doi.org/10.3390/mi10120870