Accurate Measurements of the Rotational Velocities of Brushless Direct-Current Motors by Using an Ultrasensitive Magnetoimpedance Sensing System


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
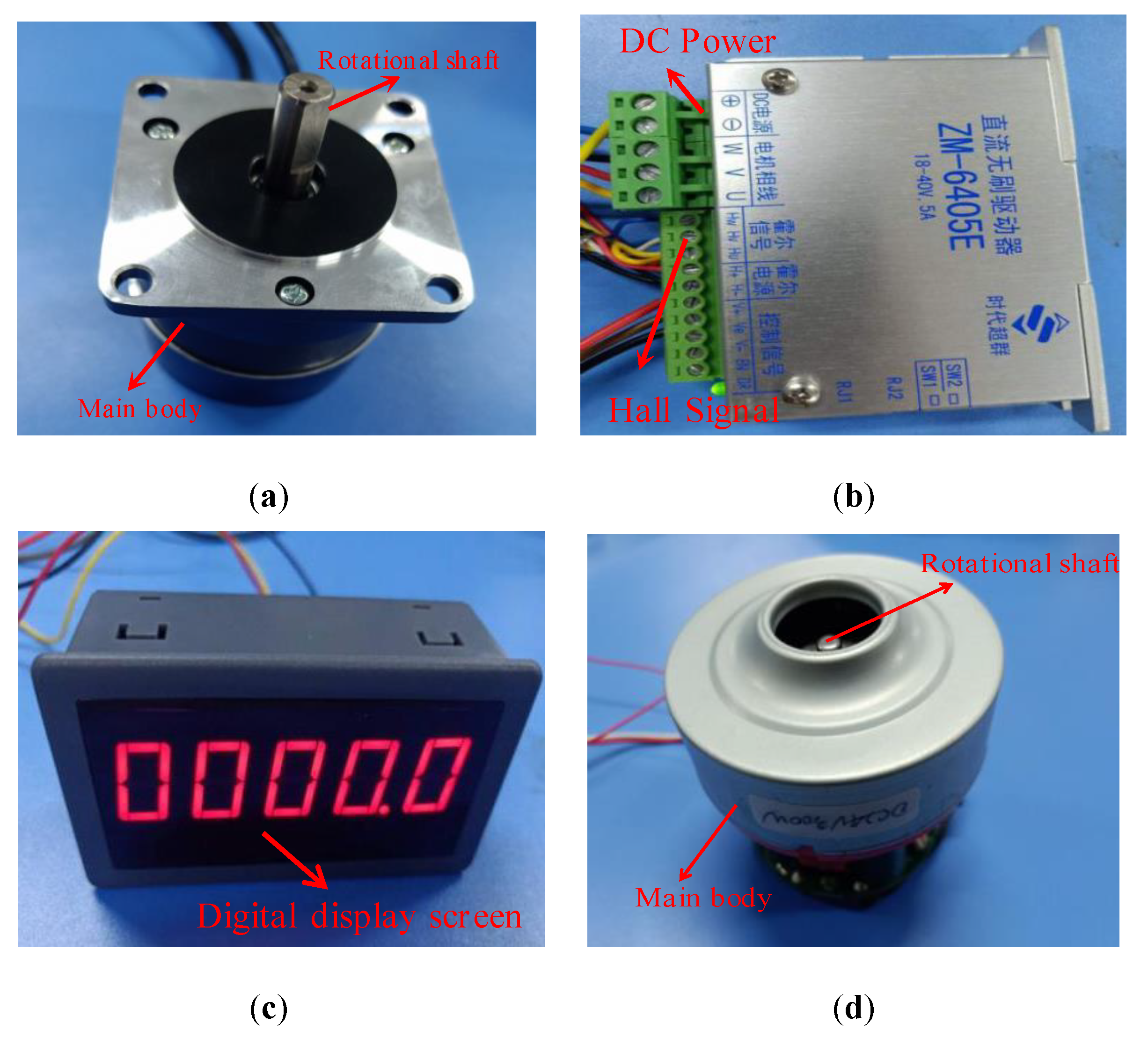
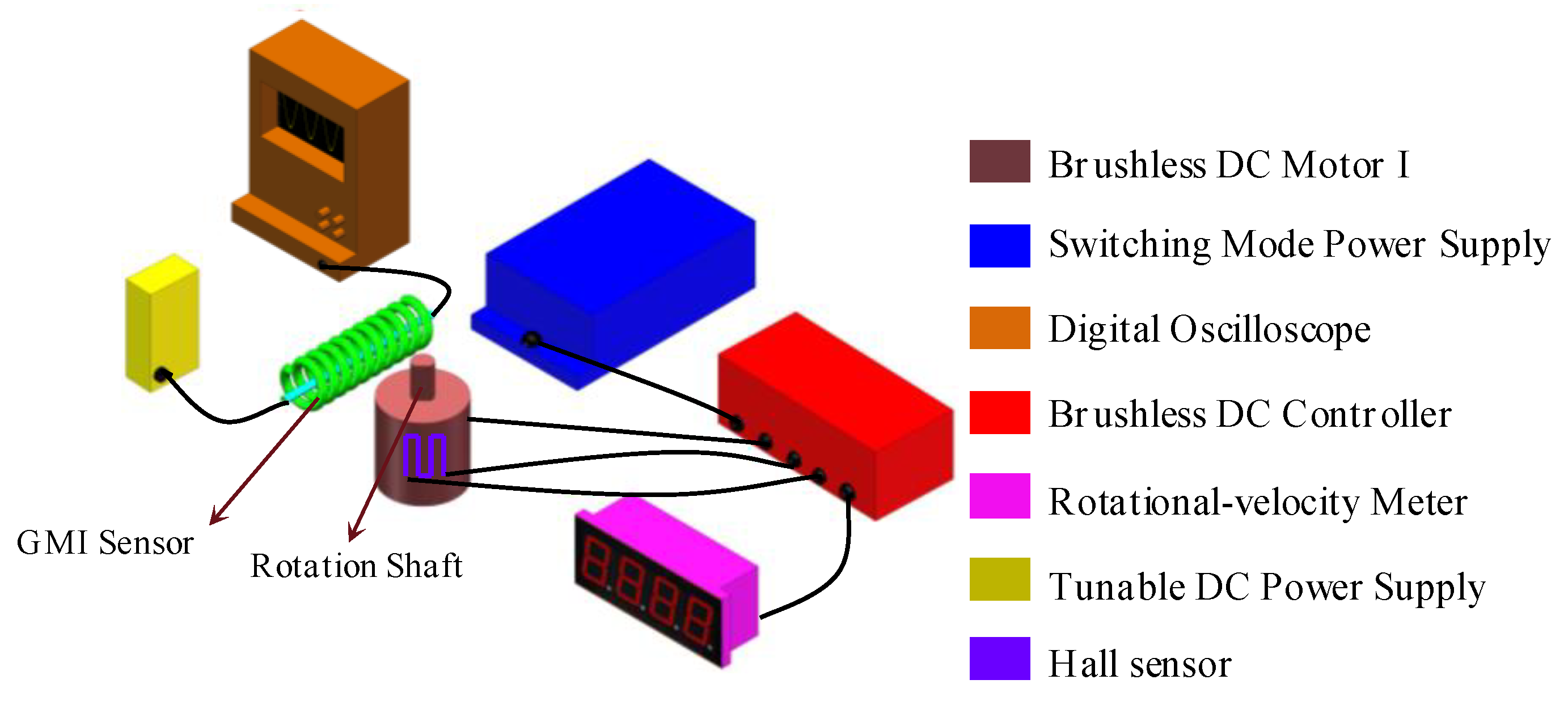
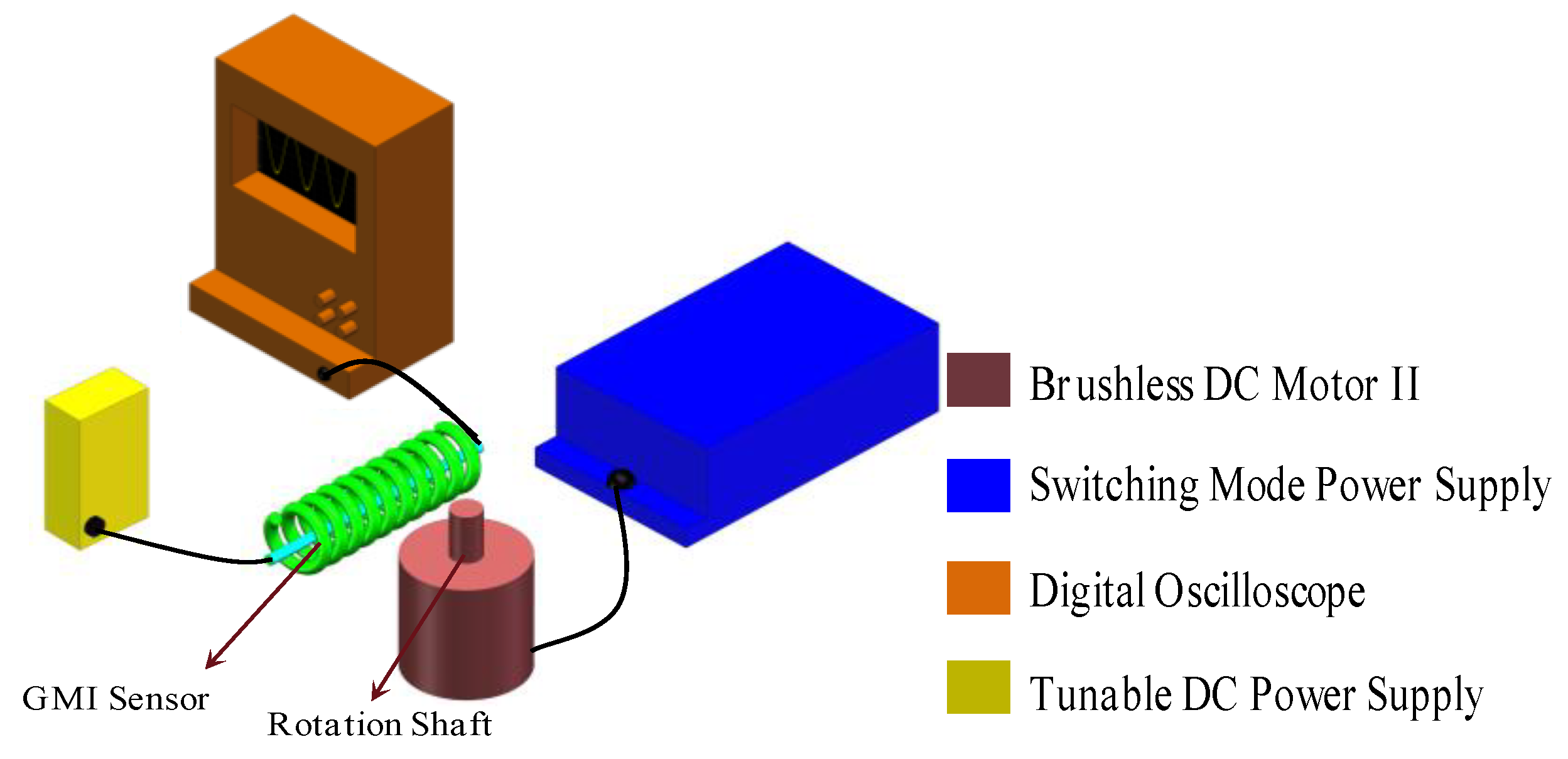
2. Experimental Details
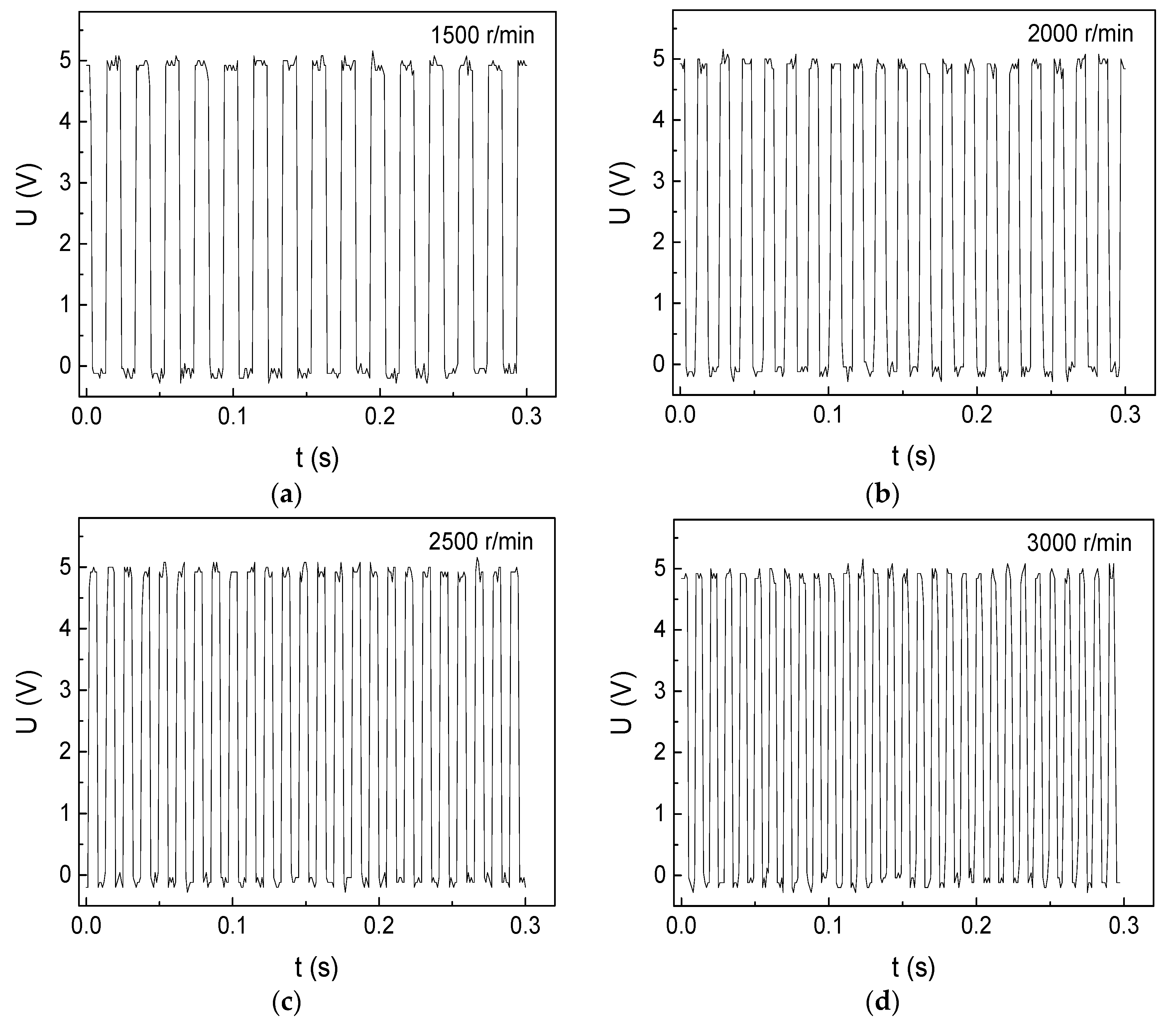
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Didosyan, Y.S.; Hauser, H.; Wolfmayr, H.; Nicolics, J.; Fulmek, P. Magneto-optical rotational velocity sensor. Sens. Actuators A Phys. 2003, 106, 168–171. [Google Scholar] [CrossRef]
- Lee, S.J.; Melikhov, Y.; Park, C.M.; Hauser, H.; Jiles, D.C. Analysis of a remote magneto-optic linear displacement sensor using a jones matrix approach. IEEE Trans. Magn. 2006, 42, 3273–3275. [Google Scholar] [CrossRef]
- Wang, L.; Yan, Y.; Hu, Y.; Qian, X. Rotational velocity measurement using single and dual electrostatic sensors. IEEE Sens. J. 2014, 15, 1784–1793. [Google Scholar]
- Bian, W.; Wu, X.; Wang, X. A novel electret rotational velocity sensor. In Proceedings of the 2014 IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; pp. 684–687. [Google Scholar]
- Granig, W.; Hartmann, S.; Köppl, B. Performance and technology comparison of GMR versus commonly used angle sensor principles for automotive applications. SAE Trans. 2007, 116, 29–41. [Google Scholar]
- Bhaskarrao, N.K.; Anoop, C.S.; Dutta, P.K. A simple signal conditioner for Tunneling Magneto-resistance based angle sensor. In Proceedings of the 2016 IEEE Annual India Conference (INDICON), Bangalore, India, 16–18 December 2016; pp. 1–6. [Google Scholar]
- Rieger, G.; Ludwig, K.; Hauch, J.; Clemens, W. GMR sensors for contactless position detection. Sens. Actuators A Phys. 2001, 91, 7–11. [Google Scholar] [CrossRef]
- Freitas, P.P.; Costa, J.L.; Almeida, N.; Melo, L.V.; Silva, F.; Bernardo, J.; Santos, C. Giant magnetoresistive sensors for rotational speed control. J. Appl. Phys. 1999, 85, 5459–5461. [Google Scholar] [CrossRef]
- Dou, K.; Qian, Z.H.; Yu, X.D.; Bai, R.; Shi, S.H.; Zhan, H.L.; Sun, Y.; Yang, S. GMR-based Gear Sensor with Wide Air Gap. Instrum. Tech. Sens. 2012, 11, 6. [Google Scholar]
- Burger, F.; Besse, P.A.; Popovic, R.S. New single chip Hall sensor for three phases brushless motor control. Sens. Actuators A Phys. 2000, 81, 320–323. [Google Scholar] [CrossRef]
- Wu, Z.; Bian, L.; Wang, S.; Zhang, X. An angle sensor based on magnetoelectric effect. Sens. Actuators A Phys. 2017, 262, 108–113. [Google Scholar] [CrossRef]
- Zhong, J.; Zhong, S.; Zhang, Q.; Peng, Z. Measurement of instantaneous rotational velocity using double-sine-varying-density fringe pattern. Mech. Syst. Signal Process. 2018, 103, 117–130. [Google Scholar] [CrossRef]
- Zhu, Y.; Feng, G.; Li, Y.; Han, C.; Li, X. Design of Motor Velocity Measurement System Based on DSP56F8346. Auto Eng. 2018, 2, 6. [Google Scholar]
- Hong, D.K.; Jeong, Y.H.; Woo, B.C.; Kim, T.H. Electric-mechanical performance analysis of high velocity motor for electric turbo charger. Int. J. Appl. Electromagn. Mech. 2018, 57, 125–133. [Google Scholar] [CrossRef]
- Hung, C.W.; Lin, C.T.; Liu, C.W.; Yen, J.Y. A variable-sampling controller for brushless DC motor drives with low-resolution position sensors. IEEE Trans. Ind. Electron. 2007, 54, 2846–2852. [Google Scholar] [CrossRef]
- Jung, S.Y.; Kim, Y.J.; Jae, J.; Kim, J. Commutation control for the low-commutation torque ripple in the position sensorless drive of the low-voltage brushless DC motor. IEEE Trans. Power Electron. 2014, 29, 5983–5994. [Google Scholar] [CrossRef]
- Concari, C.; Troni, F. Sensorless control of BLDC motors at low velocity based on differential BEMF measurement. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010; pp. 1772–1777. [Google Scholar]
- Xiang, S.; Zou, J.; Li, X.; Xie, W.; Zhao, Z.J. Magnetic properties and giant magneto-impedance effect in electroless-deposited CoP/Cu composite wires. Mater. Res. Express 2019, 6, 066101. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, H.; Dong, X.; Yan, H.; Lei, C.; Luo, Y. Giant magnetoimpedance based immunoassay for cardiac biomarker myoglobin. Anal. Methods 2017, 9, 3636–3642. [Google Scholar] [CrossRef]
- Yang, Z.; Sun, X.C.; Wang, T.; Lei, C.; Liu, Y.; Zhou, Y.; Lei, J. A giant magnetoimpedance-based biosensor for sensitive detection of Escherichia coli O157: H7. Biomed. Microdevices 2015, 17, 5. [Google Scholar] [CrossRef]
- Wang, T.; Lei, C.; Yang, Z.; Sun, X.; Liu, Y.; Zhou, Y. Meander-shaped magnetoimpedance sensor for measuring inhomogeneous magnetic fringe fields of NiFe films. Appl. Phys. Lett. 2014, 105, 172404. [Google Scholar] [CrossRef]
- Wang, T.; Zhou, Y.; Lei, C.; Luo, J.; Xie, S.; Pu, H. Magnetic impedance biosensor: A review. Biosens. Bioelectron. 2017, 90, 418–435. [Google Scholar] [CrossRef]
- Wang, T.; Wang, B.; Chen, Y.; Luo, Y. A giant magneto-inductive sensor for measuring high rotational speed of brushed and brushless direct-current motors. AIP Adv. 2019, 9, 095204. [Google Scholar] [CrossRef]
- Liu, J.; Li, Z.; Jiang, S.; Du, Z.; Shen, H.; Zhang, L. Multiplex magnetic field annealing evoked remarkable GMI improvement in co-based amorphous wires. J. Alloys Compd. 2016, 683, 7–14. [Google Scholar] [CrossRef]
- Liu, J.; Shen, H.; Xing, D.; Sun, J. Optimization of GMI properties by AC Joule annealing in melt-extracted Co-rich amorphous wires for sensor applications. Phys. Status Solidi 2014, 211, 1577–1582. [Google Scholar] [CrossRef]
- Matsuoka, A.; Matsumura, K.; Kubota, A.; Tashiro, K.; Wakiwaka, H. Residual magnetization measurements of a motor to be used in satellites. In Proceedings of the ICMIT 2009: Mechatronics and Information Technology, Gwangju, Korea, 3–5 December 2009; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7500, p. 750012. [Google Scholar]
- Shannon, C.E. Communication in the presence of noise. Proc. IRE 1949, 37, 10–21. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Wang, B.; Luo, Y.; Li, H.; Rao, J.; Wu, Z.; Liu, M. Accurate Measurements of the Rotational Velocities of Brushless Direct-Current Motors by Using an Ultrasensitive Magnetoimpedance Sensing System. Micromachines 2019, 10, 859. https://doi.org/10.3390/mi10120859
Wang T, Wang B, Luo Y, Li H, Rao J, Wu Z, Liu M. Accurate Measurements of the Rotational Velocities of Brushless Direct-Current Motors by Using an Ultrasensitive Magnetoimpedance Sensing System. Micromachines. 2019; 10(12):859. https://doi.org/10.3390/mi10120859
Chicago/Turabian StyleWang, Tao, Bicong Wang, Yufeng Luo, Hengyu Li, Jinjun Rao, Zhizheng Wu, and Mei Liu. 2019. "Accurate Measurements of the Rotational Velocities of Brushless Direct-Current Motors by Using an Ultrasensitive Magnetoimpedance Sensing System" Micromachines 10, no. 12: 859. https://doi.org/10.3390/mi10120859