1. Introduction
The Gravity Recovery and Climate Experiment (GRACE) [
1] is a low-low satellite-to-satellite tracking (LL-SST) mission which has provided information on long-term temporal variations in Earth’s gravity field for 15 years. The twin satellites were launched on 17 March 2002, using a K-band ranging (KBR) system (or microwave ranging instrument, MWI) to measure the intersatellite distance variations caused by the Earth’s gravity field during the mission. Since non-gravitational forces also affect the intersatellite range, both GRACE satellites host an accelerometer (ACC) to measure the non-gravitational accelerations acting on the satellites. GRACE ended its mission in 2017 and its successor mission GRACE Follow-On (GRACE-FO/GFO) [
2], which hosts two intersatellite ranging instruments, the KBR (or MWI) and a high-precision laser ranging interferometer (LRI), was successfully launched on 22 May 2018. The KBR and LRI of GRACE-FO work in parallel and both of their range measurements can be used for gravity field recovery.
Gravity field recovery requires the intersatellite range (or range rate) between the center of mass (COM or CM, the latter of which is used in this paper) of each satellite. However, the ranging instrument can only provide distance measurement between reference points of the two satellites. The reference point is the antenna phase center (APC) for KBR, and for LRI is a point called the vertex point (VP), which is defined by a triple mirror assembly (TMA), where the VP is the intersection point of three mirror planes [
3], as shown in
Figure 1. In each GRACE-FO satellite, the KBR antenna phase center is placed about 1.5 m away from the CM, while the TMA VP is close to the CM within 0.5 mm [
4]. As long as an offset exists between the reference point and the CM, an angle-dependent geometric pathlength error arises—when the satellite attitudes change, the distance between the reference points of the twin satellites varies accordingly. In other words, satellite attitude variations cause an error in the range measurement for both KBR and LRI. For the LRI case, this effect is commonly referred to as tilt-to-length (TTL) coupling.
Tilt-to-length coupling is commonly seen in laser interferometers with movable components. For space-based laser interferometers, such as those in the LISA mission and the LISA Pathfinder (LPF) mission, the tilt-to-length coupling is one of the main error sources. A series of studies on TTL coupling have been carried out for these missions [
5,
6,
7,
8,
9]. For gravity missions like GRACE-FO, the tilt-to-length coupling in LRI is mainly due to the CM-VP offset as mentioned above. Other TTL error sources, like the beam splitters and the wavefront curvature, were discussed in [
10]. The angle-dependent error generated by the CM-APC offset in KBR is also called the TTL error in this paper since its principle is the same as the error caused by the CM-VP offset in LRI. For the KBR in GRACE and GRACE-FO, in-orbit maneuvers, called KBR calibration, are performed to determine the APC positions. Each KBR calibration maneuver consists of four different submaneuvers: positive pitch maneuver, negative pitch maneuver, positive yaw maneuver, and negative yaw maneuver [
11]. For each submaneuver, the TTL error signals are enlarged by wiggling the satellite with a certain angle offset. For KBR observations generated by the maneuvers, precision orbit determination (POD) results are applied to eliminate the orbital effects and polynomials are fitted to reduce the low-frequency POD error. After estimating the APC position of both satellites, a term called the antenna offset correction (AOC), which is provided in the Level-1B data product [
12], is computed with the satellite attitudes determined by the star cameras. TTL correction for LRI is not provided in the GRACE-FO RL04 Level-1B data product [
13], though the nadir and cross-track components of the TMA VP positions can be estimated by the so-called center-of-mass calibration (CMC) maneuvers whose initial purpose is to determine the offset between the CM and the center of mass of the ACC proof mass for each satellite [
14]. For each CMC maneuver, a periodic rotation around the desired axis is performed on one satellite by activating the corresponding magnetic torque rods.
Several attempts have been made to improve the TTL coupling estimation results for KBR and LRI. In [
15], additional geometric biases in terms of the pitch and yaw angles of the CM-to-APC vectors were estimated in the process of gravity field retrieval by treating them as estimable parameters together with other customary parameters. The time-variable gravity field solutions were significantly improved after adjustment of the geometric biases. Unlike the KBR case, a band-pass filter covering the rotation frequency of CMC maneuvers (83.3 mHz) is directly applied to the LRI range and the pointing angles [
10,
14]. In this way, the low-frequency orbital effects can be successfully removed without applying the POD results and polynomial fitting. The reason for not using the POD results is that the LRI TTL errors generated by the CMC maneuvers are much smaller due to the small offset between the CM and VP, but are still higher than the noise level thanks to the low noise ranging measurement of LRI at a Fourier frequency above 40 mHz, which allows parameter estimation at high frequencies. However, the duration of a CMC maneuver is only 180 s, generating relatively little data, part of which is not valid for parameter estimation because of the thruster events on the other satellite [
14]. Considering the fact that the TTL error exists in the entire range data since launch, data from calibration maneuvers in a certain restricted time span may be a disadvantange for parameter estimation.
In this paper, an alternative approach to TTL coupling estimation for LRI, using the range data without any specific calibration maneuvers for the TTL error, is investigated. This approach does not interrupt the laser link and allows data with longer periods to be included for parameter estimation. Only the TTL coupling parameters are estimated, which is different from the method in [
15] in which various types of parameters are estimated in the same process where the parameters may interact with each other. Since the laser ranging interferometer has been adopted as the main satellite-to-satellite tracking instrument for future gravity missions, such as the Next Generation Gravity Mission (NGGM) [
16,
17] and the GRACE-ICARUS (GRACE-I) project [
18], the KBR case is not discussed in the following.
In
Section 2, the working principle of LRI is briefly introduced. In
Section 3, we discuss the two-way ranging (TWR) formulations for LRI, which represents preparation for the TTL model and the numerical simulation. The basic TTL model for parameter estimation is derived in
Section 4. The topic of
Section 5 is the numerical simulation process in which five types of data are generated. The TTL estimation results and discussion are given in
Section 6. In
Section 7, the conclusions are drawn.
2. Overview of LRI
The LRI is a transponder-type heterodyne interferometer: one satellite is treated as the master role where the laser frequency is stabilized by an optical Fabry–Pérot (FP) cavity, while the other one acts as a transponder in which the local laser continuously reproduces the phase of the received (RX) light from the master satellite through an optical phase-locked loop (OPLL). Each satellite is equipped with photodiodes and phasemeters to measure the phase of the interference light.
Figure 1 is a schematic illustration of the LRI optical components. On the master side, by using the Pound–Drever–Hall (PDH) method [
19], the laser frequency is required to be stabilized to
for Fourier frequencies above 0.01 Hz. It was reported that at frequencies below 0.2 Hz, contributions from gravitational and non-gravitational forces dominate the LRI ranging signal [
20,
21]; thus, it is hard to estimate the laser frequency noise for GRACE-FO in flight at low frequencies. However, based on the performance of the LRI cavity measured on the ground and the actual flight data, the Albert Einstein Institution (AEI) provided the following formula to model the laser frequency noise of LRI [
10]:
where ASD is the abbreviation of amplitude spectral density which is defined as the square root of power spectral density (PSD). The frequency-stabilized laser beam is injected to the optical bench (OB) through a fiber collimator and split at a beam splitter (BS) into two parts—the local oscillator (LO) part and the transmitted (TX) part. The local beam interferes with the received beam whose frequency is a bit different due to a frequency offset
introduced on the transponder side and a Doppler shift caused by the relative velocity between the satellites. By means of a differential wavefront sensing (DWS) technique [
22], the misaligned angle between the two beams is determined and the fast steering mirror (FSM) is controlled to compensate this angle by changing the direction of the local beam. In this situation, the TX beam direction is parallel to the received beam and it points correctly towards the distant satellite after retro-reflection at the TMA as long as the TMA mirrors are pairwise perpendicular. A compensation plate (CP) is needed to compensate part of the TTL coupling effect caused by the BS [
3].
On the transponder side, the optical path is the same while the laser is not in the reference mode and the cavity for frequency stabilization is not used. The laser frequency is locked to the frequency of the incoming light and a constant offset is added in the frequency-offset digital phase-locked loop (DPLL). This ensures that the beatnote frequency of the interference light at the quadrant photodiodes (QPD) varies around 10 MHz and the phase variations of the incoming light are reproduced by the transponder laser. The frequency-shifted light is then sent back to the master satellite and interferes after the beam splitter mentioned above.
Ideally, the phase measured on the transponder side is fully contributed by the frequency offset while the full round-trip pathlength measurement is performed on the master side where the contribution of the frequency offset still exists. Therefore, a two-way ranging phase combination is performed by computing the difference of the transponder and master phase, canceling the contributions from the frequency offset and retaining the ranging signals.
3. Two-Way Ranging Formulations
Before the launch of GRACE, Kim provided the dual one-way ranging (DOWR) formulations for KBR in his thesis [
23]. In this section, the two-way ranging formulations for LRI with similar expressions are described. The cumulated carrier phase measurement between two satellites at the specified nominal time
and
can be modeled as follows:
where
where SAT1 and SAT2 represent the master satellite and the transponder satellite, respectively.
and
represent the difference between the actual time and the nominal time of phase measurement. The sign of the phase expression of SAT2 in front of the brackets on the right-hand side should be negative to obtain positive phase measurement because the phasemeter interprets the frequency of each input signal as positive and
is assumed to be larger than
due to the frequency offset
.
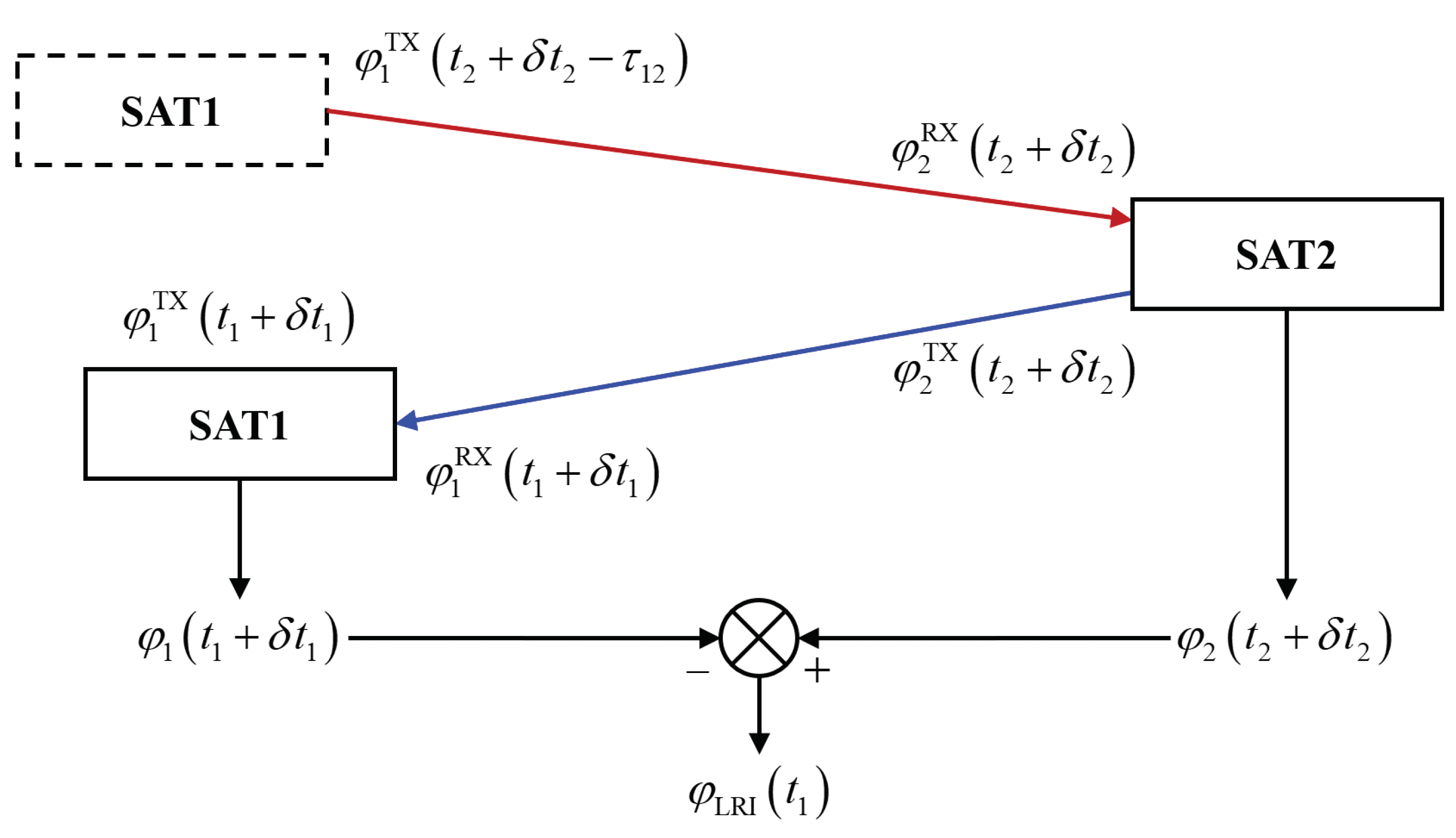
Figure 2 shows the phase observables of the two satellites at the actual time and their combinations
. The light (red line) from the master (SAT1 with a dashed border) arrives at the transponder (SAT2 with a solid border) after a travel time
. Similarly, the light (blue line) from the transponder arrives at the master (SAT1 with a solid border) after a travel time
. The time-of-flight (TOF)
and
can be precisely calculated with an iteration process [
24]. The nominal time
and
satisfy the equation
The cumulated phase of RX light is equal to the phase of the corresponding TX light at the transmitting time, i.e.,
Due to the frequency offset introduced in the OPLL, the phase of interference light in SAT2 increases fast as a ramp, the slope of which is roughly
. By writing the OPLL phase contributions as
, the phase of the TX light in SAT2 can be expressed as
Substituting Equations (
3)–(
5) into Equation (
2) yields
The two-way ranging phase of LRI at nominal time
is computed as the difference of the transponder and master phase:
By substituting Equation (
6) into Equation (
7) and applying the Taylor expansion since the light travel time and time tag error are small, we have
where
and
represent the master laser frequency and the heterodyne frequency in the OPLL, respectively. Each frequency can be divided into a constant part
and a tiny variable part
. Therefore, one can write
The two-way ranging phase is then written as
the unit of which can be converted from cycle to meter by using the nominal laser frequency
. Therefore, the one-way range
with the unit of meter reads
For gravity field recovery, the measured range needs to be converted into the instantaneous range between satellites, which means the distance between two satellite positions at exactly the same time. Here, we use
to represent the instantaneous range and we define an equivalent light time
corresponding to the instantaneous range as
, where
c denotes the speed of light in a vacuum. The first two terms in Equation (
11) can then be written as
where the pathlength error
due to the non-zero light travel time is defined as
By dropping the small terms in Equations (
11) and (
12), the intersatellite range measurement can be written as
where the first term on the right-hand side is the scaled value of the instantaneous range, the second term corresponds to the pathlength error due to time delays, the third term is caused by the laser frequency noise and is scaled by the range, the fourth term is due to the time tag error, the fifth term represents a constant bias, for which the measured range is called the biased range, and the last term is due to the phase readout noise. The instantaneous range in the first term is scaled for the reason that there is a small difference between the nominal laser frequency
and the actual constant part of the laser frequency
in flight. Since the cavity is unable to provide information of
, if there is no other method to obtain it in orbit, a scaled factor
s close to one will be estimated [
21], i.e.,
where
is of the order of
for the GRACE-FO mission and is provided in the RL04 LRI1B data product. After applying the scale correction, the measured biased range reads
Since the influence of the scale factor is beyond the scope of this paper and is not important to the study here, we assume that we have obtained the value of
in orbit and, thus, there is no need to estimate the scale factor in the following sections. The pathlength error
consists of all the physical effects related to the light path, including the delays due to media, TTL coupling, and relativistic effects [
25], and one should correct it by applying the so-called light time correction (LTC), taking all these effects into account. In practice, however, the light time correction is usually calculated without considering the TTL coupling, and an additional TTL correction term is estimated individually. In the GRACE-FO RL04 KBR1B data product, the light time correction and the antenna offset correction, which is referred to as the TTL correction for KBR, are provided separately in two columns. The TTL correction in the GRACE-FO RL04 LRI1B data product is set to zero since it is much smaller than the one for KBR and can be omitted. Therefore, we have
where
denotes the time-of-flight effect including the pathlength error due to media and relativistic effects;
denotes the TTL coupling error;
and
denote the estimated light time correction and the TTL correction, respectively. Once the light time correction term and the TTL correction term are estimated, we can obtain the corrected biased range [
13]
which is one of the inputs to the gravity field recovery.
4. TTL Model
This section provides a model for TTL coupling due to the CM-VP offset, which is similar to the work in [
14]. For the sake of clarity, Equation (
16) can be rewritten as
where
denotes the contributions of all other error sources.
As shown in
Figure 3, we use the subscript
i (
) to indicate the SAT1 and SAT2. The measured range can be regarded as the distance of
and
with additional bias and noise, and the instantaneous range is the distance between
and
of the two satellites. Therefore, we have
The TTL error term is then expressed as
where the approximation
is applied since the distance between
and
(
) is much smaller than the distance between
and
. The absolute value of the TTL error of each satellite is approximately the projection of the vector
on the line of sight (LOS). One can compute the TTL error in the line-of-sight frame (LOSF) shown in
Figure 3 for each satellite:
where the superscripts denote the frames of the vectors. Since the
co-rotates with the satellite around the
, the components of the vector
expressed in the satellite frame (SF) for each satellite remain unchanged, unless a disturbance to the center of mass (e.g., a mass trim maneuver aimed at moving the center of mass back to the ACC reference point [
14]) happens. With the rotation matrix
, which denotes the rotation transforming a vector from SF to LOSF, we have
The roll angle
, pitch angle
, and yaw angle
used in this paper are defined by
where
,
,
; the matrices
,
and
denote the rotations around the
x-,
y- and
z-axes by angles
,
, and
, respectively. Substitution of Equation (
24) into Equation (
23) yields
where the index
i on the right-hand side is dropped. Since the angles are small, Taylor expansion can be applied. In general, terms with order higher than two are omitted; thus, we have
where we find
is the quadratic coupling factor of the pitch and yaw angles,
is the linear coupling factor of the yaw angle, and
is the linear coupling factor of the pitch angle. The constant term is not important to the biased range. With the subscript 1 and 2 indicating the SAT1 and SAT2, respectively, the total TTL error of the two satellites reads
In the case that
(
) is small, like the GRACE-FO LRI, the quadratic coupling terms can be omitted [
14], i.e.,
In practice, the pointing angles we use for TTL coupling estimation are measured ones, which unavoidably contain biases and noise. A static angle offset is irrelevant for the linear coupling TTL error since it only introduces an additional constant term, which is not important as mentioned above. However, taking the quadratic coupling terms into account, additional linear terms appear in the expression of the TTL error because of the biased angles. In this situation, the TTL error for each satellite reads
where
and
denote the measured pitch and yaw angles and
and
denote the pitch and yaw angle biases between the measured and the true angles, respectively, and they satisfy the equations
and
. The additional linear terms are in direct proportion to
and the angle biases. These terms can be omitted when
is not a large number since the largest angle biases are roughly of the order of
rad. In contrast, the estimated linear TTL coupling factors will be apparently affected when
is up to 1 m. The least squares method is used for TTL coupling estimation in this paper. Six coupling factors
can be estimated according to Equation (
29) and the desired values are
in the case with zero angle biases.
As mentioned in
Section 1, a band-pass filter is applied to the LRI range and the pointing angles in the estimation process, which yields
where the operator
refers to the band-pass filter. As an example, the cutoff frequencies are 40 mHz and 175 mHz in [
10]. The band-pass-filtered instantaneous range is dominated by the term
caused by the non-gravitational forces.
, the contribution of the laser frequency noise, expressed as
according to Equation (
16), is the main error term of the band-pass-filtered
. If the band-pass-filtered TTL error
is significantly greater than the other two terms (e.g., a specific calibration maneuver has been performed), then we can directly use the following equation for TTL estimation:
where
is the small error term. The expression of TTL error is given in Equation (
27). In general, the TTL error at the passband is probably lower than the terms of the non-gravitational forces or the laser frequency noise. As shown in
Figure 4, the TTL error of GRACE-FO (green) is relatively small compared to the ranging signal and even lower than the laser frequency noise (red) at high frequencies. In the situation that the CM-VP offset in each satellite is set to 1.5 m, the TTL error may reach the level of the ranging signal at frequencies above 30 mHz, which is conducive to parameter estimation.
Considering that the ranging signal induced by non-gravitational forces can be calculated from accelerometer measurements of both satellites by integrating the differential linear accelerations on the LOS twice, one can rewrite the observation equation as
in which
(
) denotes the projection of the measured linear accelerations on the LOS for SAT
i. The enlarged low-frequency error due to the integration, as well as the constant terms, are filtered out. Equation (
32) is used for the TTL estimation in this research.
6. TTL Estimation
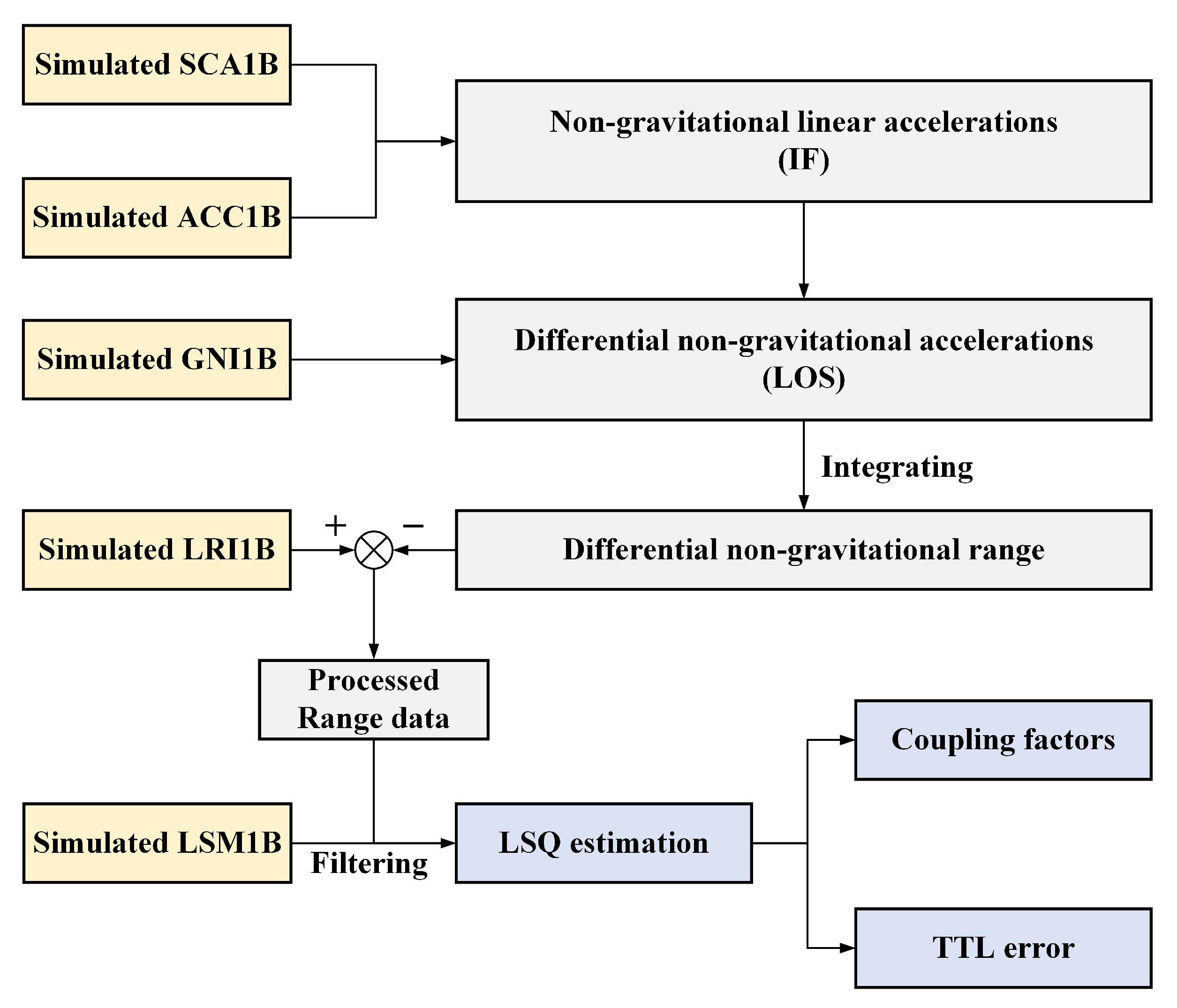
The five types of data mentioned in
Section 5 are used for TTL estimation as shown in
Figure 7. The simulated SCA1B data are used to rotate the simulated ACC1B measurements from SF to IF. Then, the simulated GNI1B was used to calculate the differential non-gravitational accelerations on the LOS. After integrating twice, the generated differential non-gravitational range was subtracted from the simulated LRI1B range data, as shown in Equation (
32). The processed range data were then band-pass-filtered together with the simulated LSM1B angles and the LSQ estimation was performed to obtain the values of the coupling factors and the TTL error. The cutoff frequencies of the band-pass filter were set to 50 and 100 mHz in the estimation process.
The impact of different conditions, including the CM-VP offset, the pointing angle noise, and the laser frequency noise for TTL estimation, was investigated. We divide the results into two types: results under the S-type longitudinal offset (i.e., , like the small CM-VP offset of GRACE-FO’s LRI) and the results under the L-type longitudinal offset (i.e., , like the large CM-APC offset of KBR). The difference between the estimated and the true value should be lower than the GRACE-FO’s TTL error for successful TTL estimation.
6.1. Results under S-Type Offset
6.1.1. Impact of Pointing Angle Noise
Assuming for each satellite, the impact under different noise levels of pointing angle measurement was tested in the TTL estimation. Only four linear coupling factors were estimated.
The ASD of the input and estimated TTL error are shown in red and blue, respectively, in
Figure 8. In the cases that white noise with levels of
and
were added to the pointing angles, the estimation errors shown in black are similar, which can also be seen in
Table 3, where the estimated coupling factors are at the same level. In case (c), the angle noise level is similar to that of the GRACE-FO LSM1B data and the estimation error is a bit higher than the TTL error of GRACE-FO (green). When the angle noise is up to the level of
, poor estimation results can be seen. One can notice that the estimation errors at high frequencies are limited by the white angle noise instead of the estimation error of the coupling factors. It can be concluded that the noise of the angle measurement should be better than
for successful TTL estimation.
6.1.2. Impact of Lateral Offset
Keeping the longitudinal offsets unchanged as in the previous subsection, the impact of different lateral offsets is shown in
Figure 9 and
Table 4 in the case that the pointing angle noise level was set to
. As the lateral offsets increase, the true TTL error (red) grows and so does the estimation error (black) at high frequencies, which are limited by the white angle noise, while the estimation error at low frequencies does not significantly change. Considering that the high frequency noise can be filtered out, the lateral offset is not a strict condition in the case of
angle noise from the perspective of TTL estimation in this study.
6.1.3. Impact of Laser Frequency Noise
The laser frequency noise generated by 1 and 10 times the ASD model (cf. Equation (
1)) was tested for TTL estimation with
for each satellite and
white angle noise. As shown in
Figure 10 and
Table 5, the laser frequency noise in case (b) is 10 times that in case (a), and as a result, the estimation error (black) in case (b) increases compared to case (a), but is still not above the TTL error of GRACE-FO (green). Assuming that the laser frequency stability in future gravity missions will be at the same level as GRACE-FO, the laser frequency noise as well as other ranging noise lower than it may not be a serious problem for TTL estimation.
6.2. Results under L-Type Offset
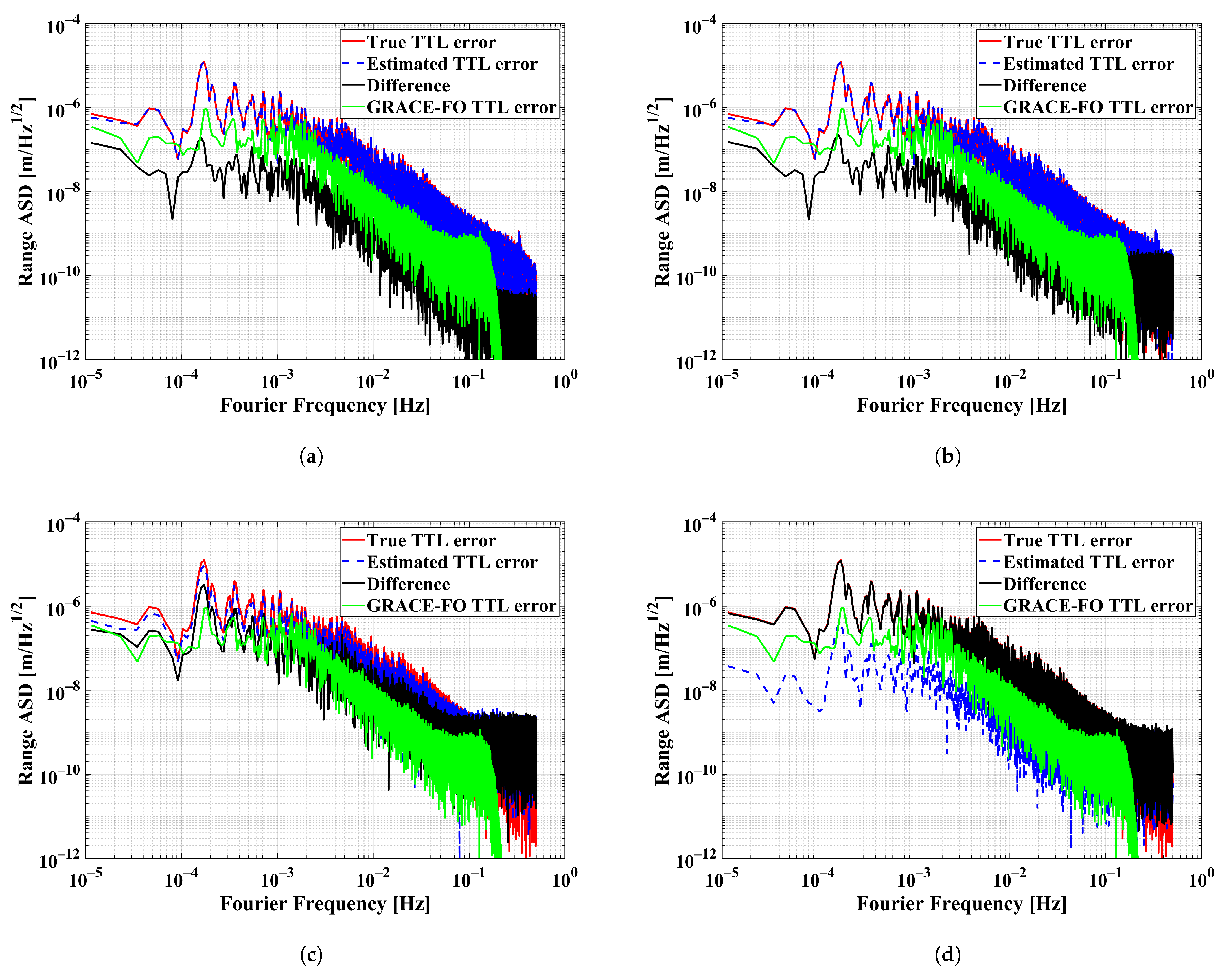
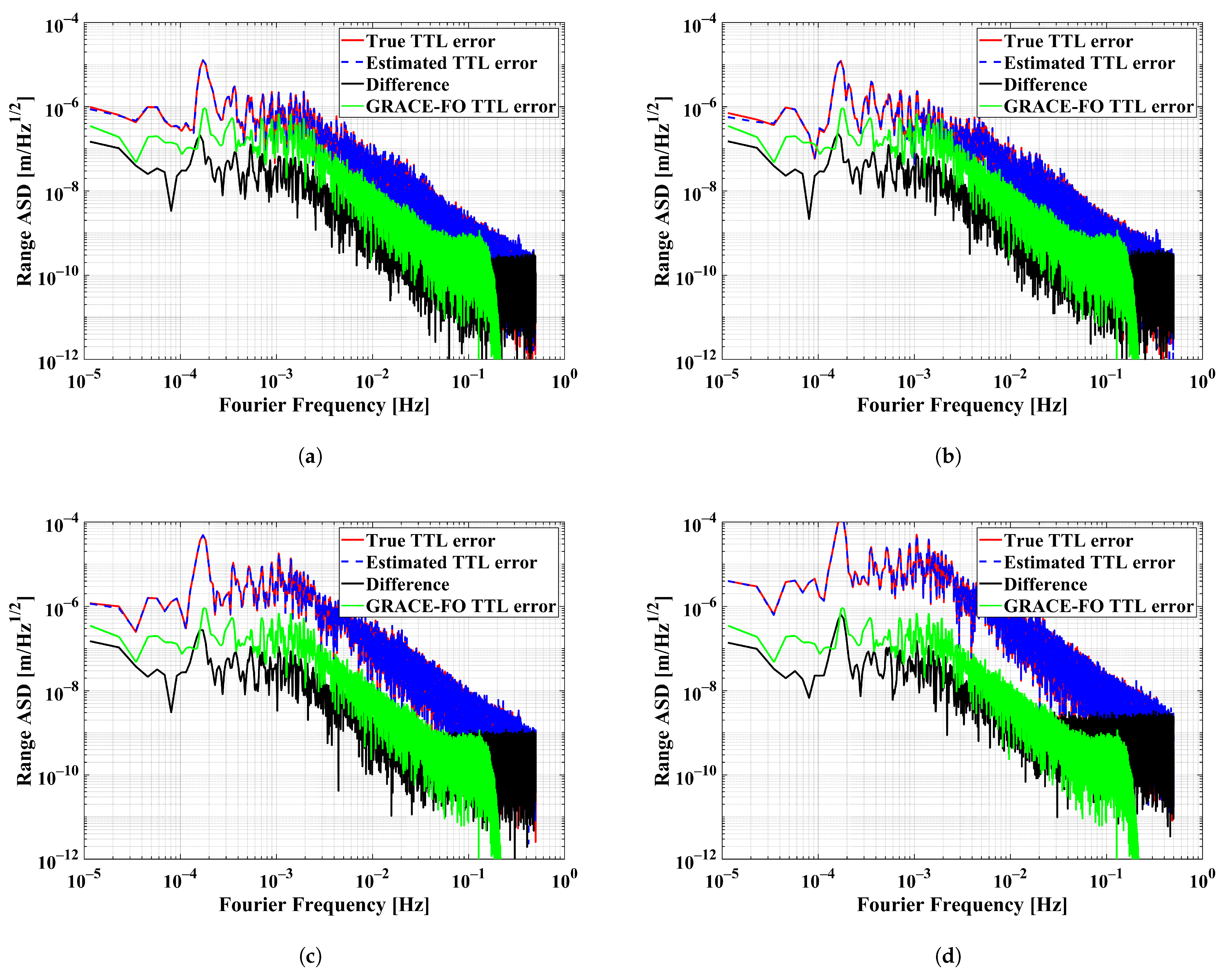
6.2.1. Impact of Pointing Angle Noise
The same conditions as in
Section 6.1.1 were applied, except that the offsets were set to
and
for each satellite. Four linear and two quadratic coupling factors
were estimated.
Figure 11 shows the TTL estimation error and
Table 6 shows the TTL coupling factors under different cases. Taking the angle biases into account, the large longitudinal offsets yield additional linear coupling terms according to Equation (
29). These terms were absorbed by the linear coupling factors in the TTL estimation. The pitch and yaw angle biases
we used here are set to
. As a result, the quadratic coupling factors deviate from the input values (see
Table 6) and the desired values of the linear coupling factors
and
(
) can be computed by the following equation:
Similarly to the results under the S-type offset, the pointing angle noise should be lower than to perform a successful TTL estimation.
6.2.2. Impact of Lateral Offset
Estimation results of different lateral offsets are shown in
Figure 12 and
Table 7, where the pointing angle noise level was set to
and the angle biases we used are the same as in the previous subsection.
It can be seen in
Figure 12 that the levels of estimation error (black) of the four cases are similar except at high frequencies, similar to the corresponding results under the S-type offset in
Figure 9. Therefore, similar conclusion can be drawn that the lateral offset is not of great significance for TTL estimation even if the longitudinal offsets are large when the angle noise level is as low as
.
6.2.3. Impact of Laser Frequency Noise
The impact of different laser frequency noise is shown in
Figure 13 and
Table 8. The angle biases and noise are the same as in the previous subsection and the offset vector was set to
for each satellite.
Although higher laser frequency noise was added in case (b), the error of TTL estimation (black) does not exceed the TTL error of GRACE-FO (green) at the frequency band shown in
Figure 13b. In other words, one can eliminate the TTL error with 1.5 m offsets to an equivalent low level caused by 0.5 mm offsets even if the frequency stability performance of the laser is an order of magnitude worse than GRACE-FO.
7. Discussion
In order to better compare the TTL estimation results under different conditions, the RMS values of the estimation error were computed after subtracting the mean since the constant term is meaningless for the biased range. The error of the TTL estimation is mainly contributed by the linear terms and can be written as
Here,
(
) denotes the difference between the estimated linear coupling factor
and the true value
. The first two terms in Equation (
54) are induced by the angle noise
, while the last two terms are due to the estimation error of the linear coupling factor
.
Figure 14 shows the RMS values of the estimation error under different pointing angle noise in the cases of S-type (blue) and L-type (magenta) longitudinal offsets.
Figure 15 shows the RMS values of the estimation error under different lateral offsets and laser frequency noise in various cases. The dashed black lines in
Figure 14 and
Figure 15 represent the RMS level of GRACE-FO’s TTL error.
The two traces in
Figure 14 are flat at angle noise below
with the values lower than 4 nm probably because the ranging noise (mainly the laser frequency noise and the added noise introduced by the accelerometers) limits the TTL estimation, which yields similar estimation error for the coupling factors in the last two terms in Equation (
54) under different angle noise. As the angle noise
increases, the first two terms grow proportionally and the coupling factor error
in the last two terms also increases, leading to the rising parts of the traces. As the RMS values of the estimation error reach the levels of the input TTL error, the two traces gradually show a trend to become flat. It can be seen in
Figure 14 that to eliminate the TTL error to the level lower than the TTL error of GRACE-FO, the angle noise should be lower than
, as mentioned above, or lower than
for a better result. One can also see the obvious difference between the results with
(blue and magenta) and
angle noise (red and green) in
Figure 15, so it is important to achieve low noise angle measurement for the estimation approach in this study.
The blue and magenta traces in
Figure 15a are flat over a wide range of lateral offsets due to the limitation of the coupling factor error in the last two terms of Equation (
54), while the flat part of the green trace is narrower, and the red trace shows no flat parts since it is dominated by the first two terms of Equation (
54), which is proportional to the pointing angle noise and the lateral offset. The flat parts of the blue and magenta traces in
Figure 15b are mainly limited by the coupling factor error, which is not induced by the laser frequency noise but other error sources, such as the accelerometer noise, while the red and green ones are limited by the pointing angle noise. As the lateral offsets grow, the slopes of the traces in
Figure 15a (e.g., the red, blue, and magenta traces) will no longer be an approximate zero value since the first two terms, which are proportional to the lateral offsets, start to dominate the estimation error, while the coupling factor error in the last two terms does not vary a lot. In contrast, the rising parts of the traces in
Figure 15b (e.g., the blue and magenta traces) are due to the increasing coupling factor error in the last two terms caused by the increasing laser ranging noise.
Figure 14 and
Figure 15 do not show much difference between the results of S-type and L-type offsets except for the red and green traces in
Figure 15a. The pointing angles used in TTL estimation contain biases of several hundreds of
, inducing additional linear coupling terms in the case of the L-type offset. Since the input angle biases were different from each other, varying from zero to several hundreds of microns, even if the input lateral offsets were set to zeros, the coefficients of the additional linear coupling terms would behave like the lateral offsets and contribute to the coupling factors
and
in the first two terms of Equation (
54), which is responsible for the flat part of the green trace. The additional linear terms in the case of the S-type offset can be omitted so the red trace behaves normally. In addition, the slope of the rising part of the green trace is slightly larger than 1, mainly due to the non-negligible terms
and
in Equation (
54), where the coupling factor
is up to
. The influence of these two terms will be much smaller in the case of the S-type offset; thus, the slope of the rising part of the red trace is almost 1.
Assuming that the CM-VP lateral offset will not exceed 0.5 mm and the performance of the laser frequency stability will be the same as GRACE-FO, the main limitation for the investigated approach to TTL estimation is the pointing angle noise. One drawback of this research is that the input attitude data were obtained from the official SCA1B data of GRACE-FO, which may deviate the actual cases in future gravity missions. The actual pointing angles at the passband may be lower, mandating stronger restrictions on the accuracy of angle measurement. All in all, the pointing angle noise level is absolutely the key to successful TTL estimation in this study. However, the official LSM1B data product of GRACE-FO only provides angle measurement with a noise level of a few , which is not precise enough for the estimation method in this paper. Therefore, attitude sensors with higher precision, such as an advanced position sensor system for the FSM based on the one in GRACE-FO or an interferometer readout system for FSM actuation angles, may be implemented in future gravity missions. The accelerometer noise model in this study plays a similar role as the laser frequency noise since the ACC noise enters when subtracting the differential non-gravitational range, and we found the contributions of the ACC noise and the laser frequency noise to the ranging data in the passband are at the similar level. Moreover, we expect better performance from the accelerometers in future gravimetry missions so that the ACC noise will not be a restriction, and thus, the impacts under different accelerometer noise are not discussed individually in this paper.
As the large TTL error induced by the L-type longitudinal offset can be subtracted to a low level, it is not necessary to install the VP of the TMA at the center of mass, which results in some flexibility to the installation layout of the satellite platform. For example, a smaller TMA in a redundant LRI may be installed 1.5 m far away from the center of mass just like the KBR case. Additionally, the estimation approach can be performed daily, making it possible to monitor the variations in the CM-VP offset day-by-day, which could provide daily and seasonal estimations for the CM movement [
14].
8. Conclusions
Non-constant systematic TTL error is commonly seen in low-low satellite-to-satellite tracking missions like GRACE and GRACE-FO, and TTL estimation methods with certain calibration maneuvers have previously been investigated in both the KBR and LRI cases. In this paper, an alternative approach for LRI TTL estimation that overcomes the limitation of the time span of the calibration maneuvers has been presented. We introduced the basic working principle of LRI and derived two-way ranging formulations for LRI based on the dual one-way ranging formulations for KBR. The TTL model where the angle biases are taken into account was derived for parameter estimation, requiring data for satellite orbits, attitudes, and non-gravitational accelerations. Therefore, a numerical simulation was performed to generate the simulated GNI1B, SCA1B, ACC1B, LRI1B, and LSM1B data. Cases of S-type and L-type longitudinal offsets were discussed separately and no significant difference was found under low angle noise conditions between the two cases. By comparing the estimation results of the TTL error and the coupling factors, it was found that the impact of the pointing angle noise was more apparent than the impact of the lateral offset and the laser frequency noise. When the pointing angle noise is below , the RMS of the TTL correction error will be lower than 4 nm in the cases of both S-type and L-type offsets, which is better than the current TTL level of GRACE-FO.
For future gravity missions with LRI, it is possible to perform pointing angle measurements at higher precision with advanced attitude sensors and, thus, the approach for TTL estimation introduced in this paper may be implemented. Since the TTL estimation error is not limited by the longitudinal offset, a redundant TMA can be mounted far away from the center of mass and its size can be reduced. Moreover, the daily estimated results of the coupling factors may be used for estimation of the center of mass movement.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}