
Toward Precision Agriculture in Outdoor Vertical Greenery Systems (VGS): Monitoring and Early Detection of Stress Events


Abstract
:1. Introduction
2. Materials and Methods
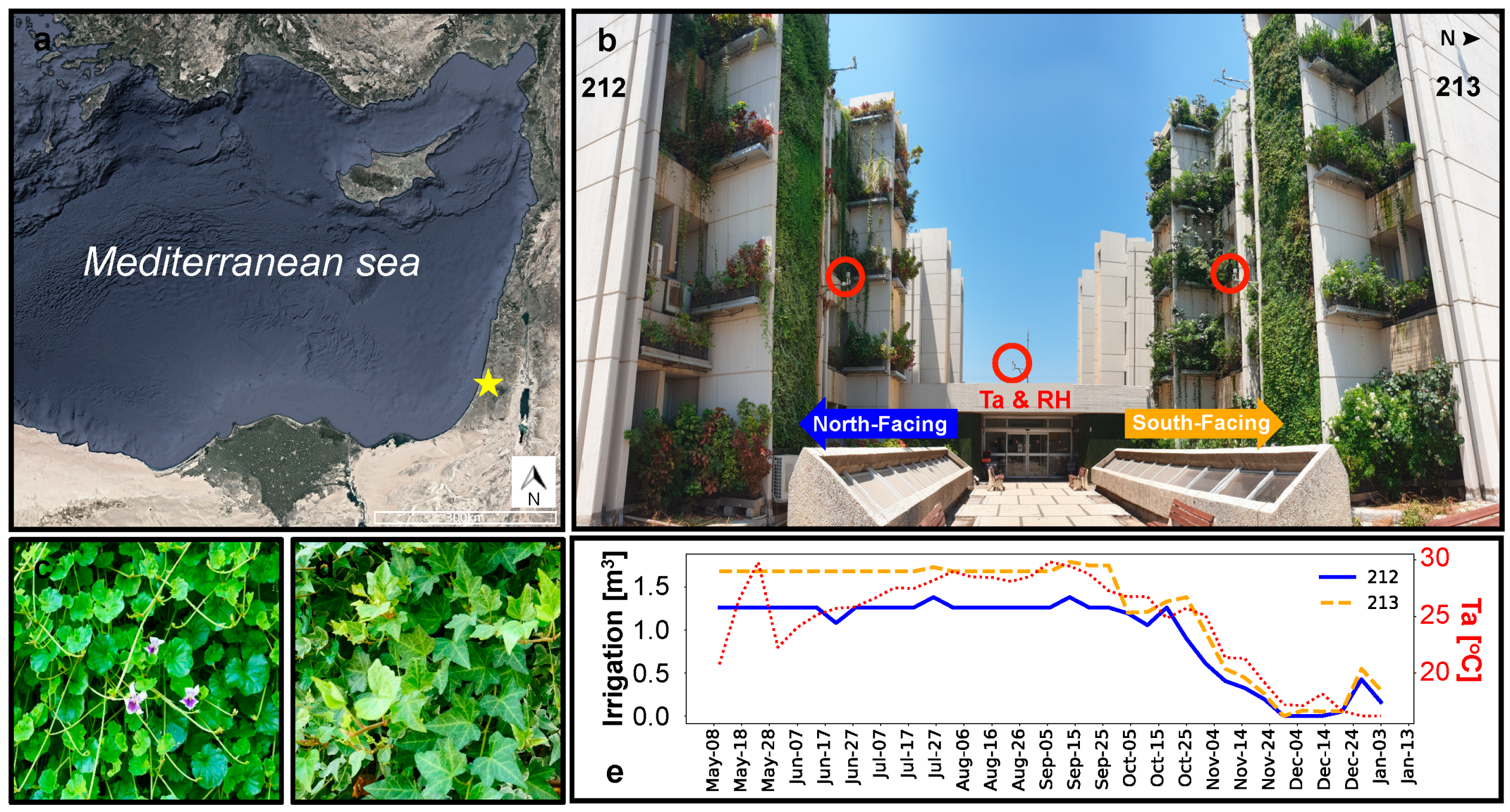
2.1. Study Area
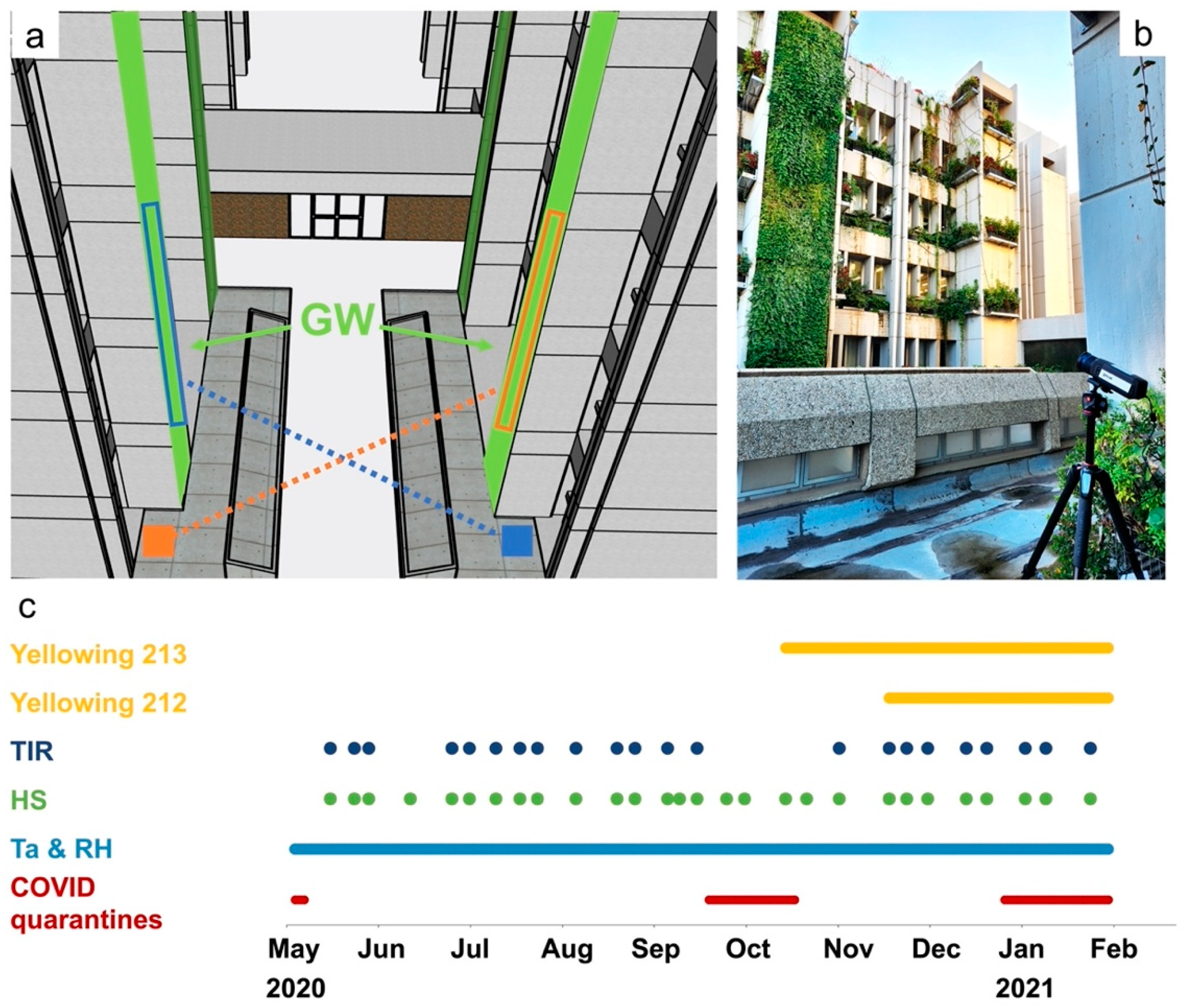
2.2. Data Acquisition
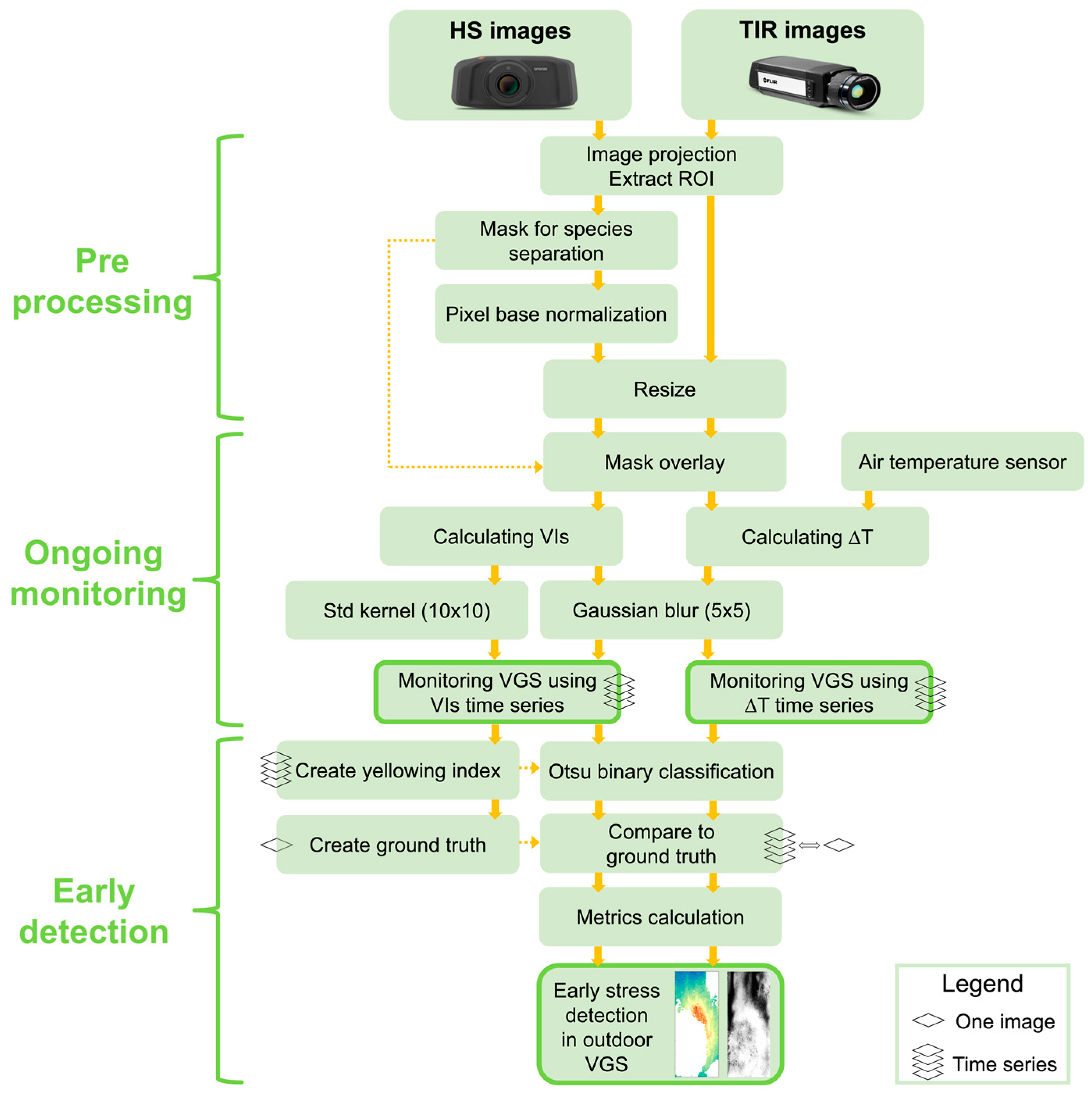
2.3. Image Processing
2.3.1. Hyperspectral (HS) Image Processing
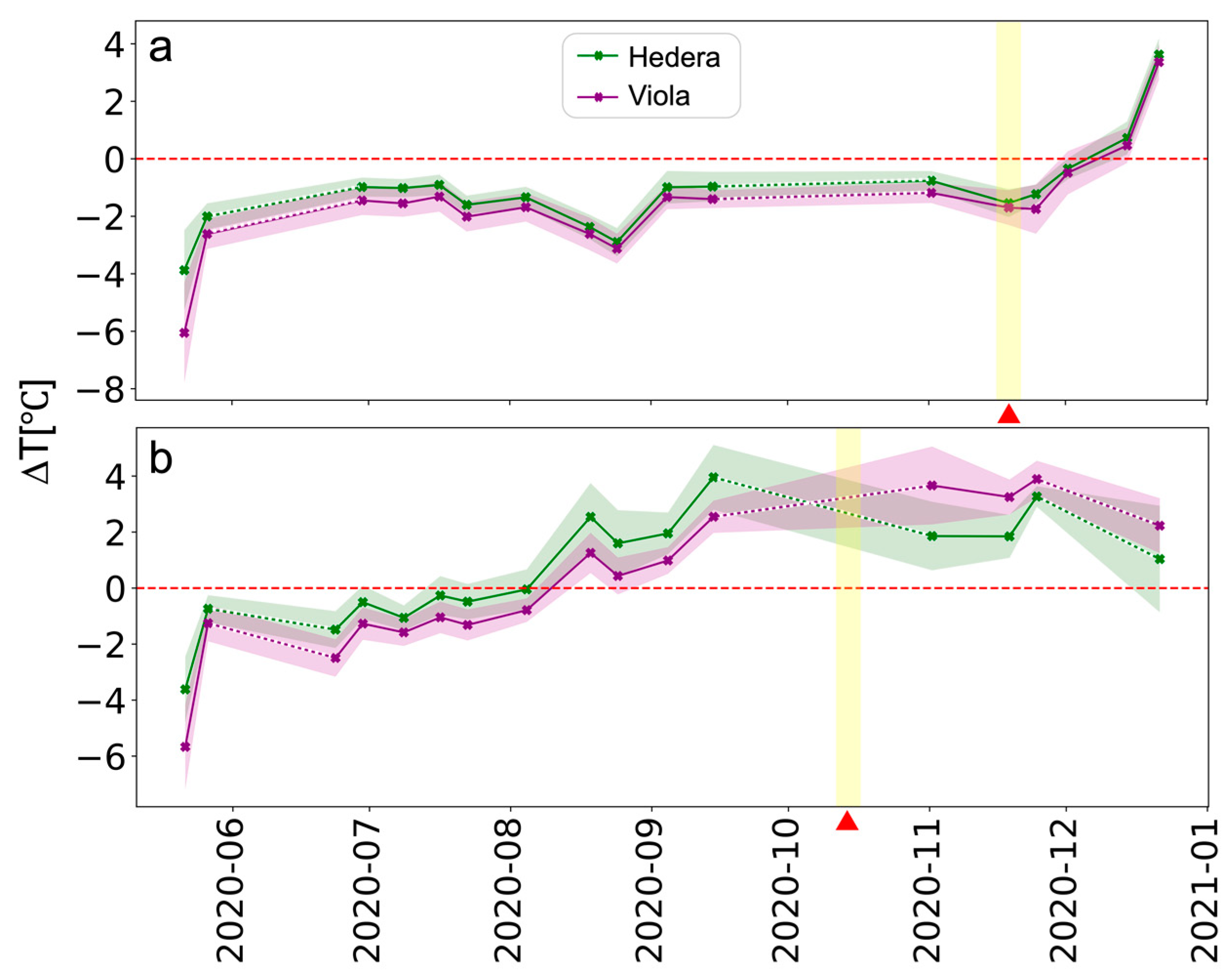
2.3.2. Thermal (TIR) Images Processing
2.4. Stress Detection
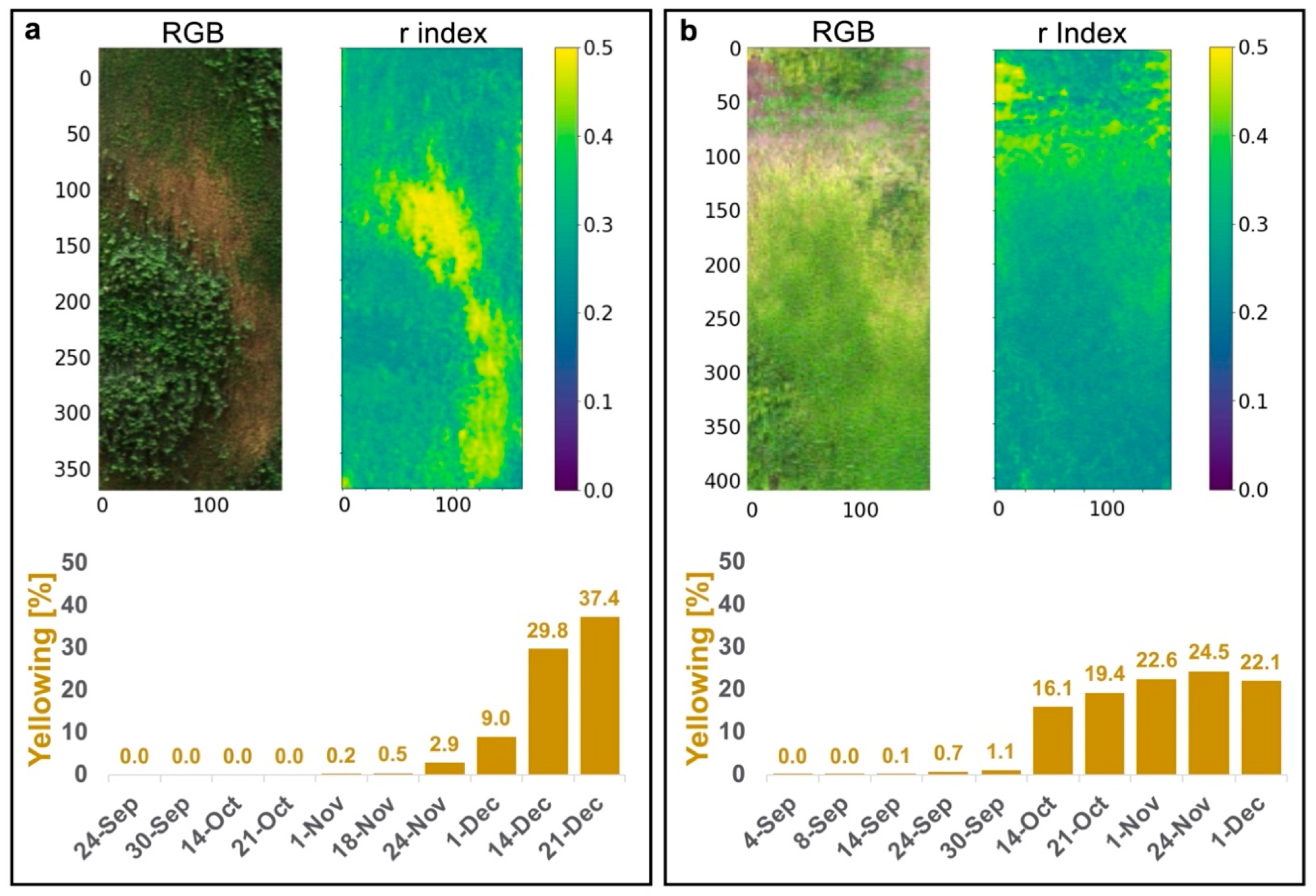
2.4.1. Yellowing Index and Ground Truth
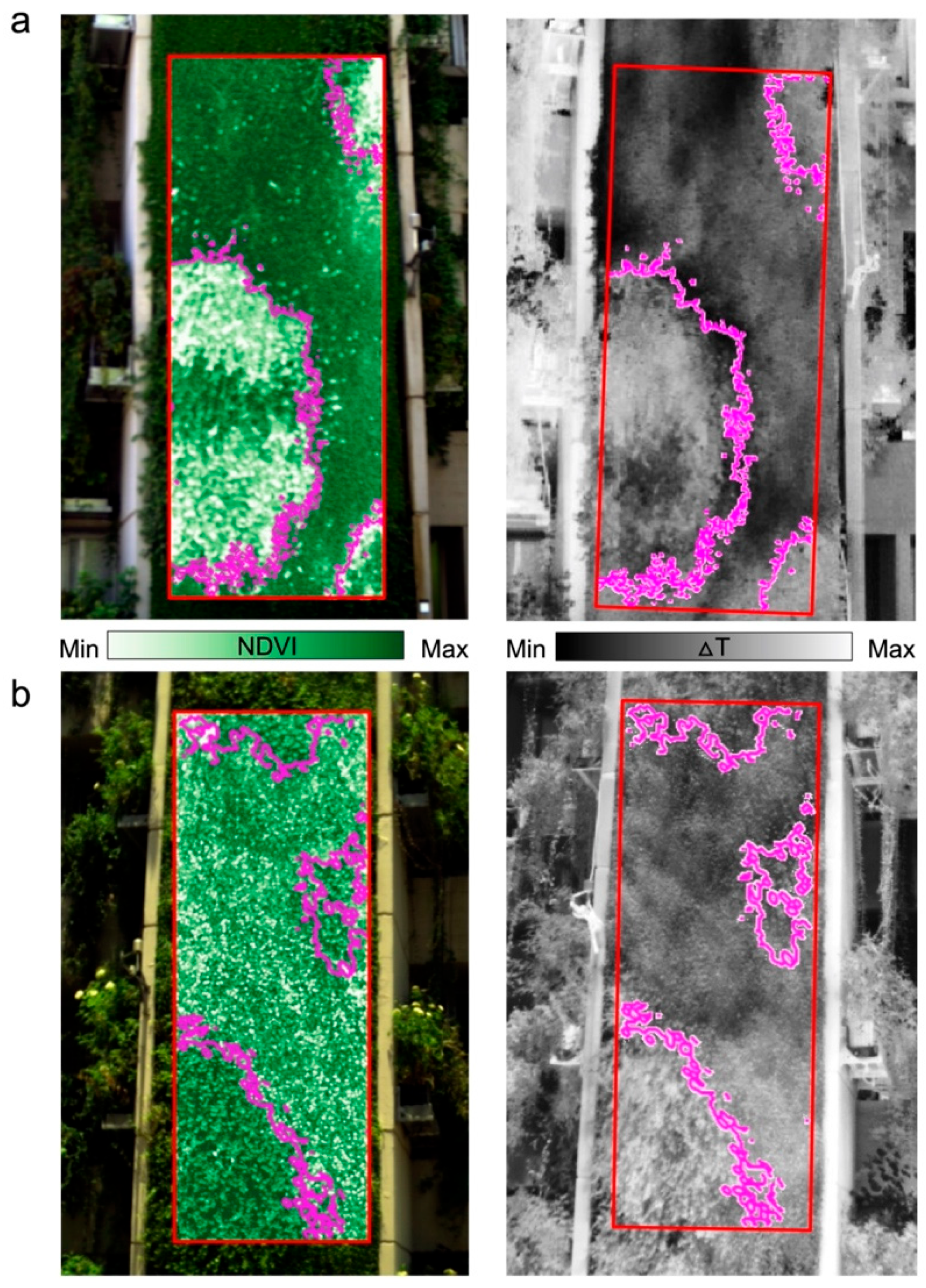
2.4.2. Stress Detection in VIs and Thermal Index Images
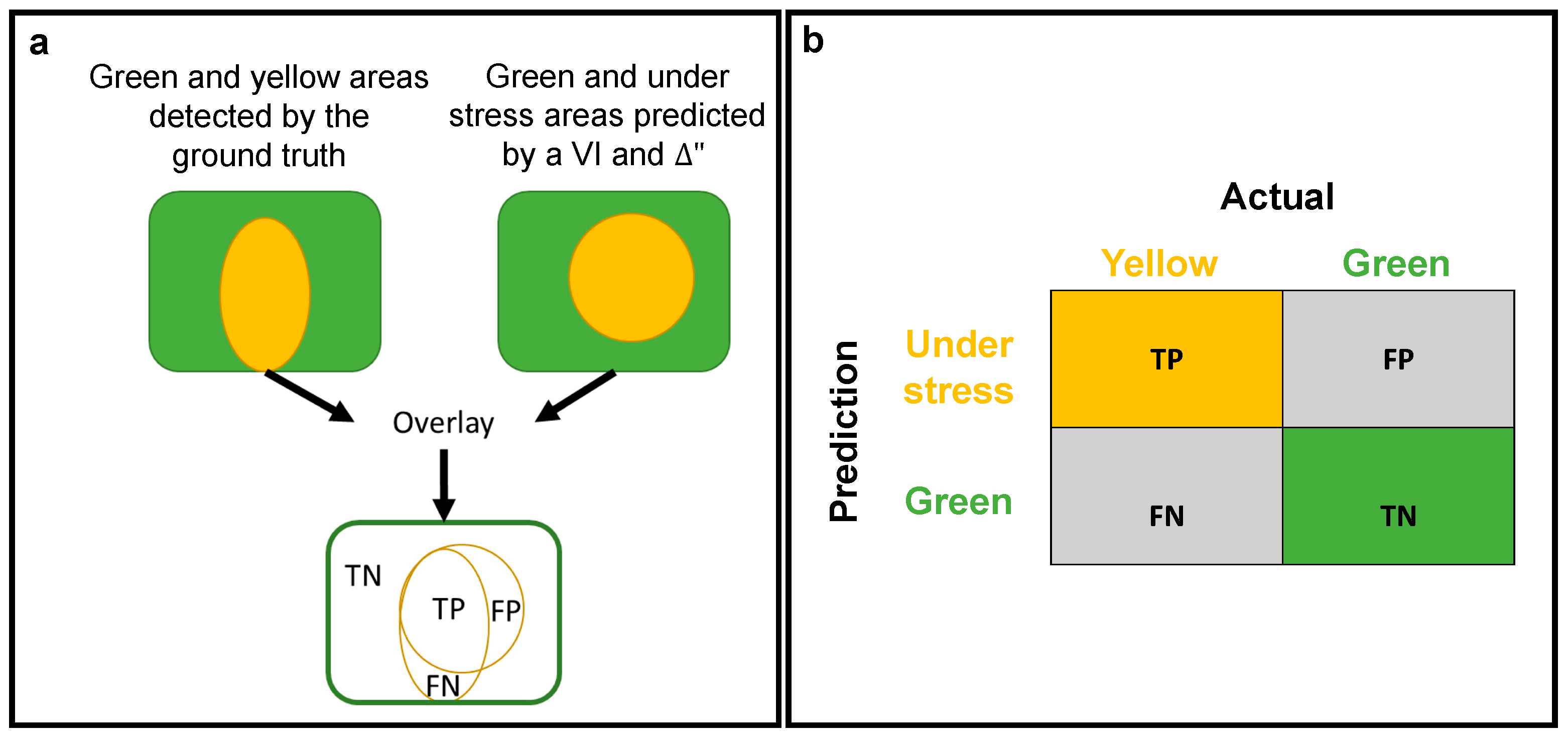
2.4.3. Stress Detection Performance Estimation
- True positive (TP): yellow pixels that were correctly predicted as under stress.
- False positive (FP): green pixels that were falsely predicted as under stress.
- True negative (TN): green pixels that were correctly predicted as green.
- False negative (FN): yellow pixels that were falsely predicted as green.

3. Results
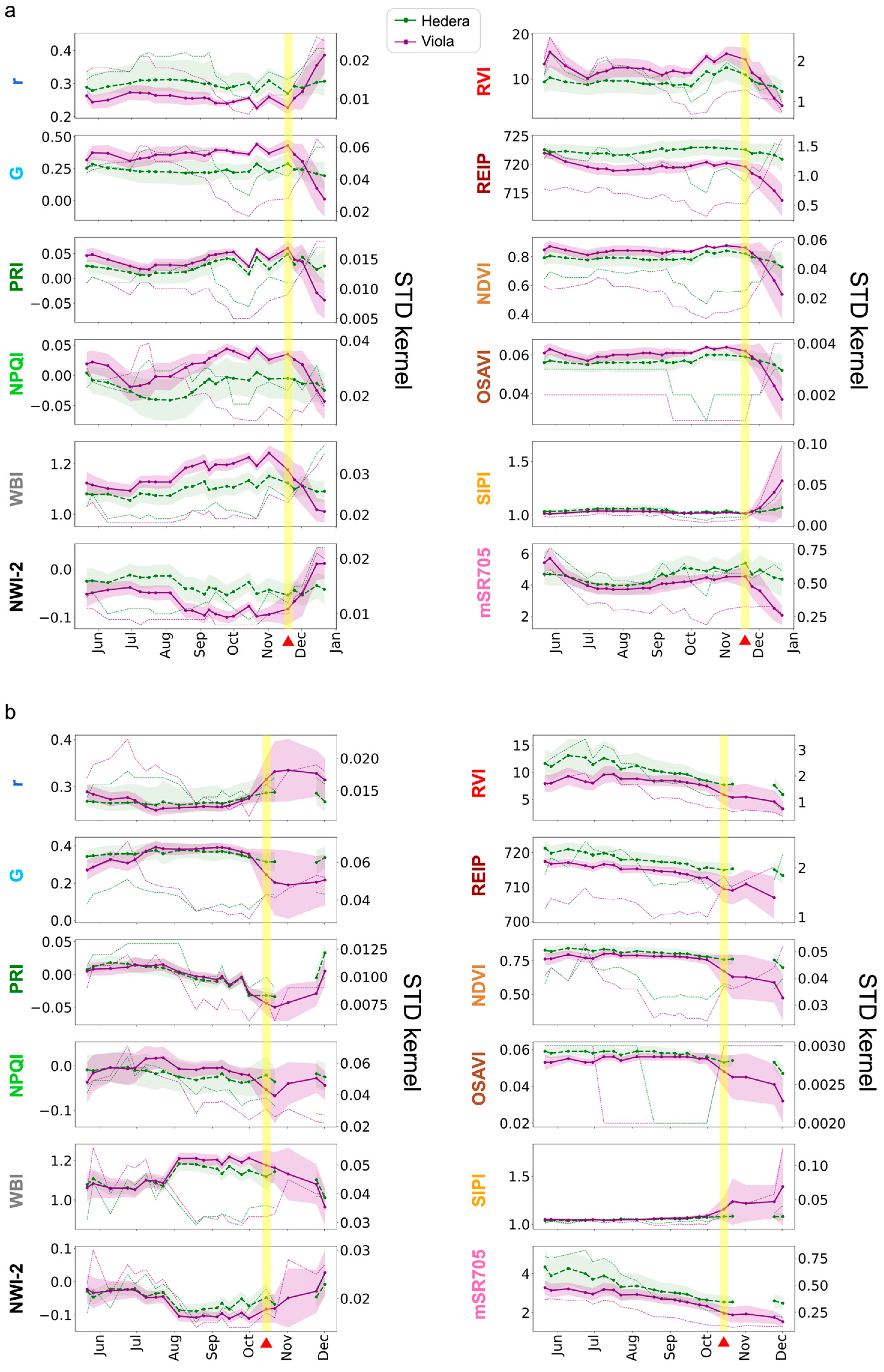
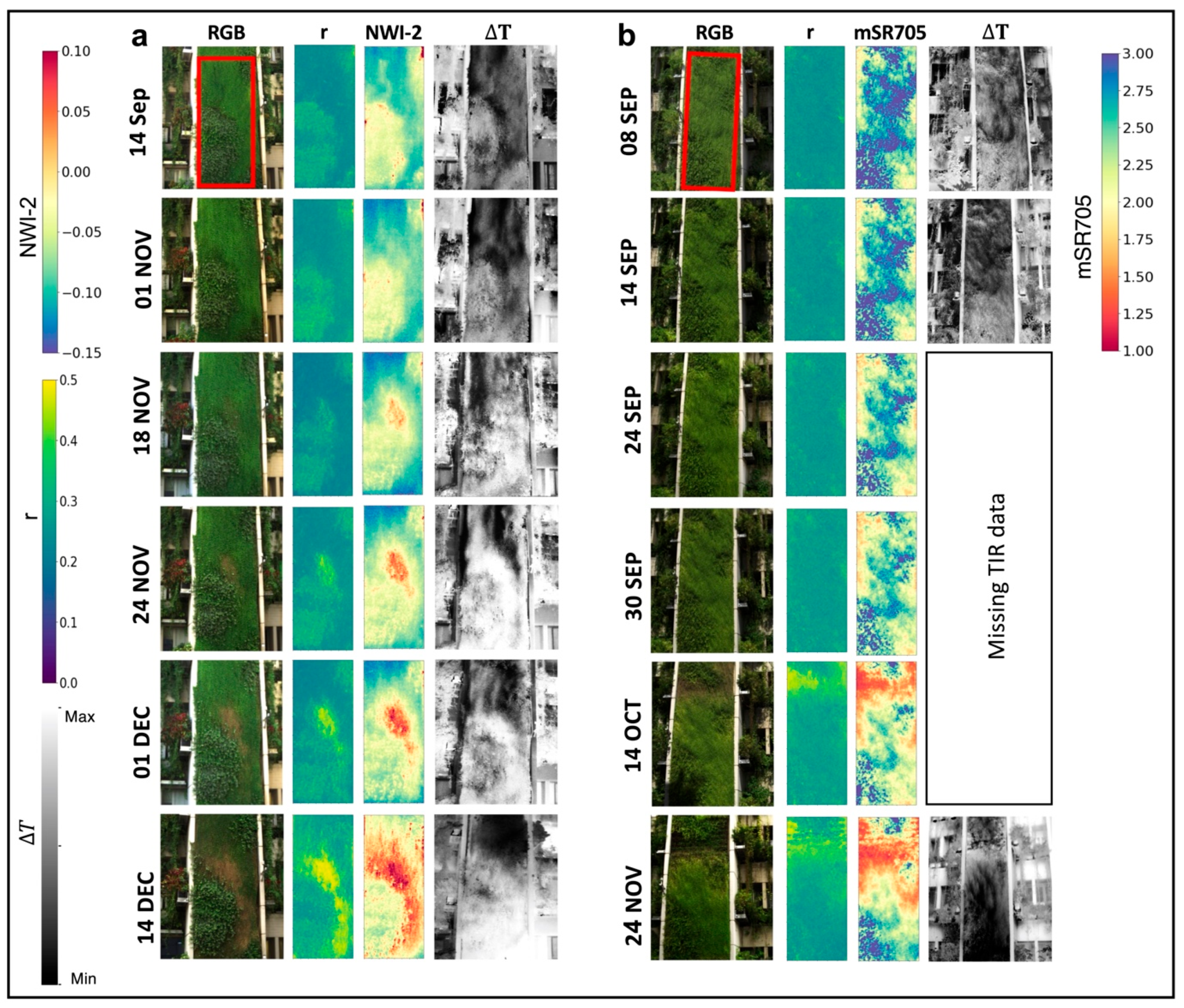
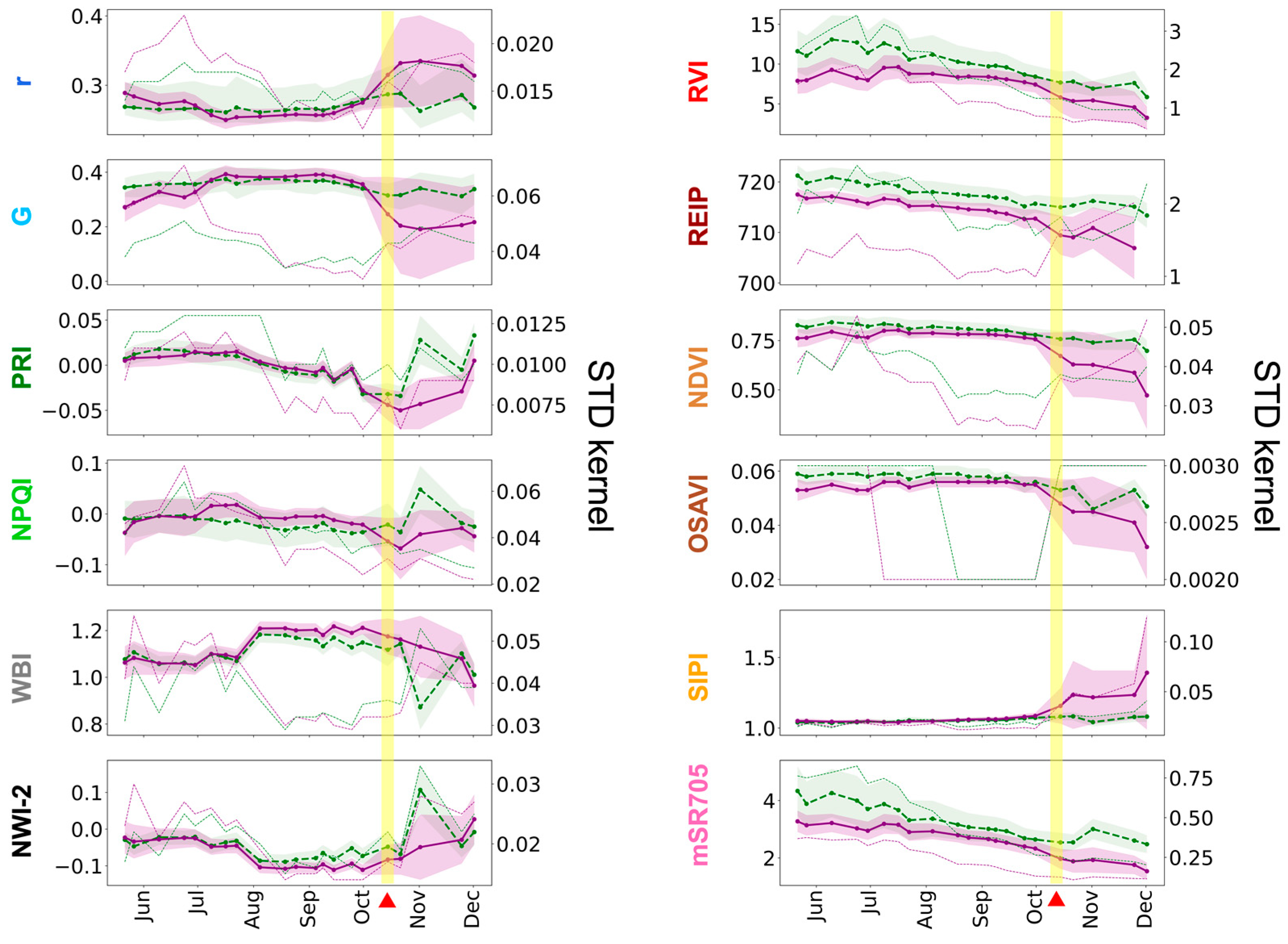
3.1. Ongoing Monitoring of VGS Using HS and TIR Images
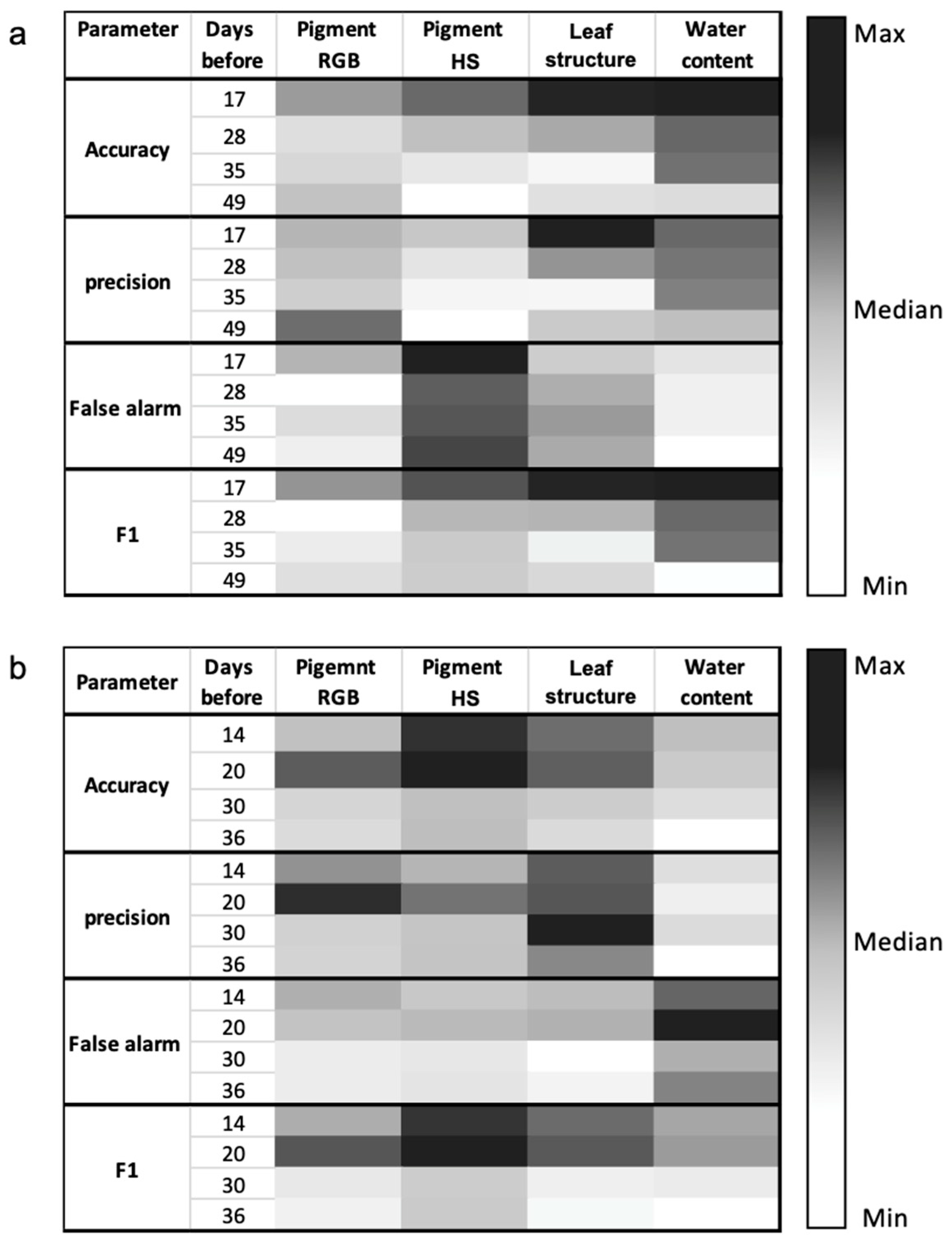
3.2. Early Detection of Stress Events
4. Discussion
5. Summary and Conclusions
- Consistent monitoring utilizing HS and TIR images can identify shifts in VGS health through index values, standard deviation, and STD kernel metrics.
- Both vegetation species experienced stress, yet only Viola hederacea exhibited yellowing and eventual demise. Our observations suggest that the Hedera helix is less vulnerable to changes in irrigation patterns and can recover more effectively following stress events.
- Species differentiation is pivotal for meticulous monitoring, accounting for each species’ unique characteristics and stress responses. Nevertheless, monitoring and visualizing the overall GW over time, without segregating individual species, can offer invaluable insights into the overall health of the GW and facilitate the identification of spatially linked issues.
- Given the complexity of urban settings and the vertical arrangement of vegetation, variations in illumination should be considered when implementing image-based VGS monitoring, and further investigation is needed.
- Early detection performance of stressed vegetation ranged from 14 to 35 days before visible yellowing, with an accuracy of 0.85 to 0.91.
- The insights gained from this study could be harnessed to formulate an automated spatial decision support system that fosters more efficient VGS operations.
- Additional investigations into stress detection methods and the adoption of low-cost cameras in outdoor VGS should be explored under different conditions and with various plant species.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RGB Index | Definition | Reference |
|---|---|---|
| r | R/(R + G + B) | [45] |
| g | G/(R + G + B) | [45] |
| b | B/(R + G + B) | [45] |
| R − G | [45] | |
| R − B | [45] | |
| G − B | [45] | |
| (R − G)/(R + G) | [45,46] | |
| (R − B)/(R + B) | [45] | |
| (G − B)/(G + B) | [45] | |
| (R − G)/(R + G + B) | [45,83] | |
| (R − B)/(R + G + B) | [45] | |
| (G − B)/(R + G + B) | [45,83] | |
| RGRI | R/G | [84] |
| GLI | (2G − R − B)/(2G + R + B) | [85] |

References
- Pérez, G.; Perini, K. Nature Based Strategies for Urban and Building Sustainability; Elsevier: Oxford/Cambridge, UK, 2018; ISBN 978-0-12-812150-4. [Google Scholar]
- Ghazalli, A.J.; Brack, C.; Bai, X.; Said, I. Physical and Non-Physical Benefits of Vertical Greenery Systems: A Review. J. Urban Technol. 2019, 26, 53–78. [Google Scholar] [CrossRef]
- Ottelé, M.; Van Bohemen, H.D.; Fraaij, A.L.A. Quantifying the Deposition of Particulate Matter on Climber Vegetation on Living Walls. Ecol. Eng. 2010, 36, 154–162. [Google Scholar] [CrossRef]
- Sternberg, T.; Viles, H.; Cathersides, A.; Edwards, M. Dust Particulate Absorption by Ivy (Hedera helix L) on Historic Walls in Urban Environments. Sci. Total Environ. 2010, 409, 162–168. [Google Scholar] [CrossRef]
- Susorova, I.; Azimi, P.; Stephens, B. The Effects of Climbing Vegetation on the Local Microclimate, Thermal Performance, and Air Infiltration of Four Building Facade Orientations. Build. Environ. 2014, 76, 113–124. [Google Scholar] [CrossRef]
- Zuckerman, N.; Lensky, I.M. Thermal Performance of Vertical Greenery Systems (VGS) in a Street Canyon: A Real-Scale Long-Term Experiment. Build. Environ. 2023, 244, 110750. [Google Scholar] [CrossRef]
- Coma, J.; Pérez, G.; De Gracia, A.; Burés, S.; Urrestarazu, M.; Cabeza, L.F. Vertical Greenery Systems for Energy Savings in Buildings: A Comparative Study between Green Walls and Green Facades. Build. Environ. 2017, 111, 228–237. [Google Scholar] [CrossRef]
- Wong, I.; Baldwin, A.N. Investigating the Potential of Applying Vertical Green Walls to High-Rise Residential Buildings for Energy-Saving in Sub-Tropical Region. Build. Environ. 2016, 97, 34–39. [Google Scholar] [CrossRef]
- Pérez, G.; Coma, J.; Barreneche, C.; De Gracia, A.; Urrestarazu, M.; Burés, S.; Cabeza, L.F. Acoustic Insulation Capacity of Vertical Greenery Systems for Buildings. Appl. Acoust. 2016, 110, 218–226. [Google Scholar] [CrossRef]
- Paull, N.; Krix, D.; Torpy, F.; Irga, P. Can Green Walls Reduce Outdoor Ambient Particulate Matter, Noise Pollution and Temperature? Int. J. Environ. Res. Public Health 2020, 17, 5084. [Google Scholar] [CrossRef]
- Chan, S.H.M.; Qiu, L.; Esposito, G.; Mai, K.P. Vertical Greenery Buffers against Stress: Evidence from Psychophysiological Responses in Virtual Reality. Landsc. Urban Plan. 2021, 213, 104127. [Google Scholar] [CrossRef]
- Fonseca, F.; Paschoalino, M.; Silva, L. Health and Well-Being Benefits of Outdoor and Indoor Vertical Greening Systems: A Review. Sustainability 2023, 15, 4107. [Google Scholar] [CrossRef]
- Huang, Z.; Lu, Y.; Wong, N.H.; Poh, C.H. The True Cost of “Greening” a Building: Life Cycle Cost Analysis of Vertical Greenery Systems (VGS) in Tropical Climate. J. Clean. Prod. 2019, 228, 437–454. [Google Scholar] [CrossRef]
- Carmichael, M.; Khonasty, R.; Wilkinson, S.; Schork, T. The Wallbot: A Low-Cost Robot for Green WallInspection. In Proceedings of the Australasian Conference on Robotics and Automation 2020, Brisbane, Australia, 8–10 December 2020. [Google Scholar]
- Dahanayake, K.C.; Chow, C.L. Moisture Content, Ignitability, and Fire Risk of Vegetation in Vertical Greenery Systems. Fire Ecol. 2018, 14, 125–142. [Google Scholar] [CrossRef]
- Conejos, S.; Chew, M.Y.L.; Azril, F.H.B. Green Maintainability Assessment of High-Rise Vertical Greenery Systems. Facilities 2019, 37, 1008–1047. [Google Scholar] [CrossRef]
- Helman, D.; Yungstein, Y.; Mulero, G.; Michael, Y. High-Throughput Remote Sensing of Vertical Green Living Walls (VGWs) in Workplaces. Remote Sens. 2022, 14, 3485. [Google Scholar] [CrossRef]
- Valente De Macedo, L.S.; Barda Picavet, M.E.; Puppim De Oliveira, J.A.; Shih, W.-Y. Urban Green and Blue Infrastructure: A Critical Analysis of Research on Developing Countries. J. Clean. Prod. 2021, 313, 127898. [Google Scholar] [CrossRef]
- Segovia-Cardozo, D.A.; Rodríguez-Sinobas, L.; Zubelzu, S. Living Green Walls: Estimation of Water Requirements and Assessment of Irrigation Management. Urban For. Urban Green. 2019, 46, 126458. [Google Scholar] [CrossRef]
- Gunawardena, K.; Steemers, K. Urban Living Walls: Reporting on Maintenance Challenges from a Review of European Installations. Archit. Sci. Rev. 2020, 63, 526–535. [Google Scholar] [CrossRef]
- Mosa, K.A.; Ismail, A.; Helmy, M. Introduction to Plant Stresses. In Plant Stress Tolerance; SpringerBriefs in Systems Biology; Springer International Publishing: Cham, UK, 2017; pp. 1–19. ISBN 978-3-319-59377-7. [Google Scholar]
- Pallottino, F.; Antonucci, F.; Costa, C.; Bisaglia, C.; Figorilli, S.; Menesatti, P. Optoelectronic Proximal Sensing Vehicle-Mounted Technologies in Precision Agriculture: A Review. Comput. Electron. Agric. 2019, 162, 859–873. [Google Scholar] [CrossRef]
- Pande, C.B.; Moharir, K.N. Application of Hyperspectral Remote Sensing Role in Precision Farming and Sustainable Agriculture Under Climate Change: A Review. In Climate Change Impacts on Natural Resources, Ecosystems and Agricultural Systems; Pande, C.B., Moharir, K.N., Singh, S.K., Pham, Q.B., Elbeltagi, A., Eds.; Springer Climate; Springer International Publishing: Cham, UK, 2023; pp. 503–520. ISBN 978-3-031-19058-2. [Google Scholar]
- Verma, B.; Porwal, M.; Jha, A.K.; Vyshnavi, R.G.; Rajpoot, A.; Nagar, A.K. Enhancing Precision Agriculture and Environmental Monitoring Using Proximal Remote Sensing. JEAI 2023, 45, 162–176. [Google Scholar] [CrossRef]
- Barbedo, J. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef]
- Lu, B.; Dao, P.; Liu, J.; He, Y.; Shang, J. Recent Advances of Hyperspectral Imaging Technology and Applications in Agriculture. Remote Sens. 2020, 12, 2659. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Lyon, J.G.; Huete, A. (Eds.) Hyperspectral Indices and Image Classifications for Agriculture and Vegetation: Hyperspectral Remote Sensing of Vegetation, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018; ISBN 978-1-315-15933-1. [Google Scholar]
- Zhang, J.; Huang, Y.; Pu, R.; Gonzalez-Moreno, P.; Yuan, L.; Wu, K.; Huang, W. Monitoring Plant Diseases and Pests through Remote Sensing Technology: A Review. Comput. Electron. Agric. 2019, 165, 104943. [Google Scholar] [CrossRef]
- Cohen, Y.; Alchanatis, V. Spectral and Spatial Methods for Hyperspectral and Thermal Image-Analysis to Estimate Biophysical and Biochemical Properties of Agricultural Crops. In Biophysical and Biochemical Characterization and Plant Species Studies; Thenkabail, P.S., Lyon, J.G., Huete, A., Eds.; CRC Press: Boca Raton, FL, USA, 2018; pp. 73–101. ISBN 978-0-429-43118-0. [Google Scholar]
- Cohen, Y.; Vellidis, G.; Campillo, C.; Liakos, V.; Graff, N.; Saranga, Y.; Snider, J.L.; Casadesús, J.; Millán, S.; Prieto, M.D.H. Applications of Sensing to Precision Irrigation. In Sensing Approaches for Precision Agriculture; Kerry, R., Escolà, A., Eds.; Progress in Precision Agriculture; Springer International Publishing: Cham, Switzerland, 2021; pp. 301–332. ISBN 978-3-030-78430-0. [Google Scholar]
- Katz, L.; Ben-Gal, A.; Litaor, M.I.; Naor, A.; Peres, M.; Bahat, I.; Netzer, Y.; Peeters, A.; Alchanatis, V.; Cohen, Y. Spatiotemporal Normalized Ratio Methodology to Evaluate the Impact of Field-Scale Variable Rate Application. Precis. Agric. 2022, 23, 1125–1152. [Google Scholar] [CrossRef]
- Katz, L.; Ben-Gal, A.; Litaor, M.I.; Naor, A.; Peres, M.; Peeters, A.; Alchanatis, V.; Cohen, Y. A Spatiotemporal Decision Support Protocol Based on Thermal Imagery for Variable Rate Drip Irrigation of a Peach Orchard. Irrig. Sci. 2023, 41, 215–233. [Google Scholar] [CrossRef]
- Halgamuge, M.N.; Bojovschi, A.; Fisher, P.M.J.; Le, T.C.; Adeloju, S.; Murphy, S. Internet of Things and Autonomous Control for Vertical Cultivation Walls towards Smart Food Growing: A Review. Urban For. Urban Green. 2021, 61, 127094. [Google Scholar] [CrossRef]
- Hoffmann, K.A.; Schröder, S.; Nehls, T.; Pitha, U.; Pucher, B.; Zluwa, I.; Gantar, D.; Erjavec, S.; Kozamernik, J. Vertical Green 2.0—The Good, the Bad and the Science; Universitätsverlag der TU Berlin: Berlin, Germany, 2023. [Google Scholar]
- Tasrif Anubhove, M.S.; Ashrafi, N.; Saleque, A.M.; Akter, M.; Saif, S.U. Machine Learning Algorithm Based Disease Detection in Tomato with Automated Image Telemetry for Vertical Farming. In Proceedings of the 2020 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 2–4 July 2020; pp. 250–254. [Google Scholar]
- Duman, S.; Elewi, A. Design of a Smart Vertical Farming System Using Image Processing. In Proceedings of the 2022 2nd International Conference on Computing and Machine Intelligence (ICMI), Istanbul, Turkey, 15 April 2022; pp. 1–5. [Google Scholar]
- Pérez-Urrestarazu, L.; Egea, G.; Franco-Salas, A.; Fernández-Cañero, R. Irrigation Systems Evaluation for Living Walls. J. Irrig. Drain Eng. 2014, 140, 04013024. [Google Scholar] [CrossRef]
- Pérez-Urrestarazu, L. Water Consumption of Felt-Based Outdoor Living Walls in Warm Climates. Urban For. Urban Green. 2021, 59, 127025. [Google Scholar] [CrossRef]
- Cameron, R.W.F.; Taylor, J.E.; Emmett, M.R. What’s ‘Cool’ in the World of Green Façades? How Plant Choice Influences the Cooling Properties of Green Walls. Build. Environ. 2014, 73, 198–207. [Google Scholar] [CrossRef]
- Yin, H.; Kong, F.; Middel, A.; Dronova, I.; Xu, H.; James, P. Cooling Effect of Direct Green Façades during Hot Summer Days: An Observational Study in Nanjing, China Using TIR and 3DPC Data. Build. Environ. 2017, 116, 195–206. [Google Scholar] [CrossRef]
- Piro, P.; Porti, M.; Veltri, S.; Lupo, E.; Moroni, M. Hyperspectral Monitoring of Green Roof Vegetation Health State in Sub-Mediterranean Climate: Preliminary Results. Sensors 2017, 17, 662. [Google Scholar] [CrossRef] [PubMed]
- Moroni, M.; Porti, M.; Piro, P. Design of a Remote-Controlled Platform for Green Roof Plants Monitoring via Hyperspectral Sensors. Water 2019, 11, 1368. [Google Scholar] [CrossRef]
- Yuan, X.; Laakso, K.; Davis, C.D.; Guzmán, Q.J.A.; Meng, Q.; Sanchez-Azofeifa, A. Monitoring the Water Stress of an Indoor Living Wall System Using the “Triangle Method”. Sensors 2020, 20, 3261. [Google Scholar] [CrossRef] [PubMed]
- Laganière, R. OpenCV Computer Vision Application Programming Cookbook Second Edition; Packt Publishing Ltd.: Birmingham, UK, 2014. [Google Scholar]
- Kawashima, S.; Nakatani, M. An Algorithm for Estimating Chlorophyll Content in Leaves Using a Video Camera. Ann. Bot. 1998, 81, 49–54. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and Photographic Infrared Linear Combinations for Monitoring Vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Gamon, J.A.; Peñuelas, J.; Field, C.B. A Narrow-Waveband Spectral Index That Tracks Diurnal Changes in Photosynthetic Efficiency. Remote Sens. Environ. 1992, 41, 35–44. [Google Scholar] [CrossRef]
- Penuelas, J.; Filella, I.; Gamon, J.A. Assessment of Photosynthetic Radiation-Use Efficiency with Spectral Reflectance. New Phytol. 1995, 131, 291–296. [Google Scholar] [CrossRef]
- Barnes, J.D.; Balaguer, L.; Manrique, E.; Elvira, S.; Davison, A.W. A Reappraisal of the Use of DMSO for the Extraction and Determination of Chlorophylls a and b in Lichens and Higher Plants. Environ. Exp. Bot. 1992, 32, 85–100. [Google Scholar] [CrossRef]
- Peñuelas, J.; Baret, F.; Filella, I. Semi-Empirical Indices to Assess Carotenoids/Chlorophyll Alpha Ratio from Leaf Spectral Reflectance. Photosynthetica 1995, 31, 221–230. [Google Scholar]
- Sims, D.A.; Gamon, J.A. Relationships between Leaf Pigment Content and Spectral Reflectance across a Wide Range of Species, Leaf Structures and Developmental Stages. Remote Sens. Environ. 2002, 81, 337–354. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of Leaf-Area Index from Quality of Light on the Forest Floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Guyot, G.; Baret, F.; Major, D.J. High Spectral Resolution: Determination of Spectral Shifts between the Red and near Infrared. Int. Arch. Photogramm. Remote Sens. 1988, 11, 740–760. [Google Scholar]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Rondeaux, G.; Steven, M.; Baret, F. Optimization of Soil-Adjusted Vegetation Indices. Remote Sens. Environ. 1996, 55, 95–107. [Google Scholar] [CrossRef]
- Penuelas, J.; Pinol, J.; Ogaya, R.; Filella, I. Estimation of Plant Water Concentration by the Reflectance Water Index WI (R900/R970). Int. J. Remote Sens. 1997, 18, 2869–2875. [Google Scholar] [CrossRef]
- Babar, M.A.; Reynolds, M.P.; Van Ginkel, M.; Klatt, A.R.; Raun, W.R.; Stone, M.L. Spectral Reflectance Indices as a Potential Indirect Selection Criteria for Wheat Yield under Irrigation. Crop. Sci. 2006, 46, 578–588. [Google Scholar] [CrossRef]
- Idso, S.B.; Jackson, R.D.; Reginato, R.J. Remote-Sensing of Crop Yields: Canopy Temperature and Albedo Measurements Have Been Quantitatively Correlated with Final Harvests of Wheat. Science 1977, 196, 19–25. [Google Scholar] [CrossRef]
- Jackson, R.D.; Reginato, R.J.; Idso, S.B. Wheat Canopy Temperature: A Practical Tool for Evaluating Water Requirements. Water Resour. Res. 1977, 13, 651–656. [Google Scholar] [CrossRef]
- Maes, W.H.; Steppe, K. Estimating Evapotranspiration and Drought Stress with Ground-Based Thermal Remote Sensing in Agriculture: A Review. J. Exp. Bot. 2012, 63, 4671–4712. [Google Scholar] [CrossRef]
- Sánchez-Sastre, L.F.; Alte Da Veiga, N.M.S.; Ruiz-Potosme, N.M.; Carrión-Prieto, P.; Marcos-Robles, J.L.; Navas-Gracia, L.M.; Martín-Ramos, P. Assessment of RGB Vegetation Indices to Estimate Chlorophyll Content in Sugar Beet Leaves in the Final Cultivation Stage. AgriEngineering 2020, 2, 128–149. [Google Scholar] [CrossRef]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Huang, D.Y.; Lin, T.W.; Hu, W.C. Automatic Multilevel Thresholding Based on Two-Stage Otsu’s Method with Cluster Determination by Valley Estimation. Int. J. Innov. Comput. Inf. Control. 2011, 7, 5631–5644. [Google Scholar]
- Korkmaz, S. Deep Learning-Based Imbalanced Data Classification for Drug Discovery. J. Chem. Inf. Model. 2020, 60, 4180–4190. [Google Scholar] [CrossRef] [PubMed]
- López, R.; Ramírez-Valiente, J.A.; Pita, P. How Plants Cope with Heatwaves in a Drier Environment. Flora 2022, 295, 152148. [Google Scholar] [CrossRef]
- Bustami, R.A.; Belusko, M.; Ward, J.; Beecham, S. Vertical Greenery Systems: A Systematic Review of Research Trends. Build. Environ. 2018, 146, 226–237. [Google Scholar] [CrossRef]
- Natarajan, M.; Rahimi, M.; Sen, S.; Mackenzie, N.; Imanbayev, Y. Living Wall Systems: Evaluating Life-Cycle Energy, Water and Carbon Impacts. Urban Ecosyst. 2015, 18, 1–11. [Google Scholar] [CrossRef]
- Riley, B. The State of the Art of Living Walls: Lessons Learned. Build. Environ. 2017, 114, 219–232. [Google Scholar] [CrossRef]
- Razzaghmanesh, M.; Razzaghmanesh, M. Thermal Performance Investigation of a Living Wall in a Dry Climate of Australia. Build. Environ. 2017, 112, 45–62. [Google Scholar] [CrossRef]
- Whittinghill, L.J.; Rowe, D.B. Salt Tolerance of Common Green Roof and Green Wall Plants. Urban Ecosyst. 2011, 14, 783–794. [Google Scholar] [CrossRef]
- Loh, S. Living walls—A way to green the built environment. Environ. Des. Guide 2008, 1–7. [Google Scholar]
- Chew, M.Y.L.; Conejos, S.; Azril, F.H.B. Design for Maintainability of High-Rise Vertical Green Facades. Build. Res. Inf. 2019, 47, 453–467. [Google Scholar] [CrossRef]
- Cohen, Y.; Alchanatis, V.; Meron, M.; Saranga, Y.; Tsipris, J. Estimation of Leaf Water Potential by Thermal Imagery and Spatial Analysis*. J. Exp. Bot. 2005, 56, 1843–1852. [Google Scholar] [CrossRef] [PubMed]
- Fuchs, M. Infrared Measurement of Canopy Temperature and Detection of Plant Water Stress. Theor. Appl. Climatol. 1990, 42, 253–261. [Google Scholar] [CrossRef]
- Shahtahmassebi, A.R.; Li, C.; Fan, Y.; Wu, Y.; Lin, Y.; Gan, M.; Wang, K.; Malik, A.; Blackburn, G.A. Remote Sensing of Urban Green Spaces: A Review. Urban For. Urban Green. 2021, 57, 126946. [Google Scholar] [CrossRef]
- Dutta, K.; Talukdar, D.; Bora, S.S. Segmentation of Unhealthy Leaves in Cruciferous Crops for Early Disease Detection Using Vegetative Indices and Otsu Thresholding of Aerial Images. Measurement 2022, 189, 110478. [Google Scholar] [CrossRef]
- Katsuhama, N.; Imai, M.; Naruse, N.; Takahashi, Y. Discrimination of Areas Infected with Coffee Leaf Rust Using a Vegetation Index. Remote Sens. Lett. 2018, 9, 1186–1194. [Google Scholar] [CrossRef]
- Sadeh, Y.; Zhu, X.; Chenu, K.; Dunkerley, D. Sowing Date Detection at the Field Scale Using CubeSats Remote Sensing. Comput. Electron. Agric. 2019, 157, 568–580. [Google Scholar] [CrossRef]
- Yeo, M.S.K.; Samarakoon, S.M.B.P.; Ng, Q.B.; Muthugala, M.A.V.J.; Elara, M.R. Design of Robot-Inclusive Vertical Green Landscape. Buildings 2021, 11, 203. [Google Scholar] [CrossRef]
- Fonteijn, H.; Afonso, M.; Lensink, D.; Mooij, M.; Faber, N.; Vroegop, A.; Polder, G.; Wehrens, R. Automatic Phenotyping of Tomatoes in Production Greenhouses Using Robotics and Computer Vision: From Theory to Practice. Agronomy 2021, 11, 1599. [Google Scholar] [CrossRef]
- Jung, D.-H.; Kim, C.Y.; Lee, T.S.; Park, S.H. Depth Image Conversion Model Based on CycleGAN for Growing Tomato Truss Identification. Plant Methods 2022, 18, 83. [Google Scholar] [CrossRef]
- Ouyang, C.; Hatsugai, E.; Shimizu, I. Tomato Disease Monitoring System Using Modular Extendable Mobile Robot for Greenhouses: Automatically Reporting Locations of Diseased Tomatoes. Agronomy 2022, 12, 3160. [Google Scholar] [CrossRef]
- Woebbecke, D.M.; Meyer, G.E.; Bargen, K.V.; Mortensen, D.A. Color Indices for Weed Identification Under Various Soil, Residue, and Lighting Conditions. Trans. ASAE 1995, 38, 259–269. [Google Scholar] [CrossRef]
- Saberioon, M.M.; Amin, M.S.M.; Anuar, A.R.; Gholizadeh, A.; Wayayok, A.; Khairunniza-Bejo, S. Assessment of Rice Leaf Chlorophyll Content Using Visible Bands at Different Growth Stages at Both the Leaf and Canopy Scale. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 35–45. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially Located Platform and Aerial Photography for Documentation of Grazing Impacts on Wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]










| Category | Range | Index Name | Equation | Reference |
|---|---|---|---|---|
| Pigment | VIS (RGB) | r | red/(red + green + blue) | [45] |
| G (GRVI) | (green − red)/(green + red) | [46] | ||
| VIS (HS) | PRI | ((R531 − R570)/(R531 + R570)) | [47,48] | |
| NPQI | (R415 − R435)/(R415 + R435) | [49] | ||
| Leaf structure | NIR + VIS | SIPI | ((R800 − R445)/(R800 − R680)) | [50] |
| mSR705 | (R750 − R445)/(R705 − R445) | [51] | ||
| RVI | nir/red | [52] | ||
| REIP | 700 + 40 × ((((R670 + R780)/2) − R700)/(R740 − R700)) | [53] | ||
| NDVI | (nir − red)/(nir + red) | [54] | ||
| OSAVI | (1 + 0.16) (nir − red)/(nir + red + 0.16) | [55] | ||
| Water content | NIR | WBI | R900/R970 | [56] |
| NWI-2 | (R970 − R850)/(R970 + R850) | [57] |
| LW | Metric | Pigment RGB | Pigment HS | Leaf Structure | Water Content | Thermal |
|---|---|---|---|---|---|---|
| 212 | Accuracy | 0.82 | 0.86 | 0.91 | 0.91 | 0.87 |
| Precision | 0.76 | 0.74 | 0.91 | 0.84 | 0.77 | |
| False alarm | 0.09 | 0.10 | 0.08 | 0.06 | 0.09 | |
| F1 score | 0.67 | 0.77 | 0.84 | 0.85 | 0.78 | |
| 213 | Accuracy | 0.83 | 0.87 | 0.85 | 0.83 | NA |
| Precision | 0.75 | 0.73 | 0.78 | 0.67 | ||
| False alarm | 0.10 | 0.08 | 0.09 | 0.10 | ||
| F1 score | 0.64 | 0.73 | 0.69 | 0.64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuckerman, N.; Cohen, Y.; Alchanatis, V.; Lensky, I.M. Toward Precision Agriculture in Outdoor Vertical Greenery Systems (VGS): Monitoring and Early Detection of Stress Events. Remote Sens. 2024, 16, 302. https://doi.org/10.3390/rs16020302
Zuckerman N, Cohen Y, Alchanatis V, Lensky IM. Toward Precision Agriculture in Outdoor Vertical Greenery Systems (VGS): Monitoring and Early Detection of Stress Events. Remote Sensing. 2024; 16(2):302. https://doi.org/10.3390/rs16020302
Chicago/Turabian StyleZuckerman, Noa, Yafit Cohen, Victor Alchanatis, and Itamar M. Lensky. 2024. "Toward Precision Agriculture in Outdoor Vertical Greenery Systems (VGS): Monitoring and Early Detection of Stress Events" Remote Sensing 16, no. 2: 302. https://doi.org/10.3390/rs16020302