
Optimized Integer Aperture Bootstrapping for High-Integrity CDGNSS Applications
 ,
,  ,
,
Abstract
:1. Introduction
2. IAB Overview
2.1. Float Solution Estimation
2.2. Integer Ambiguity Resolution by Integer Bootstrapping
2.3. Ambiguity Acceptance Test by IA
2.4. Fixed Solution Resolution
3. IAB Event Probabilities Based on an Upper Bound on the Failure Rate
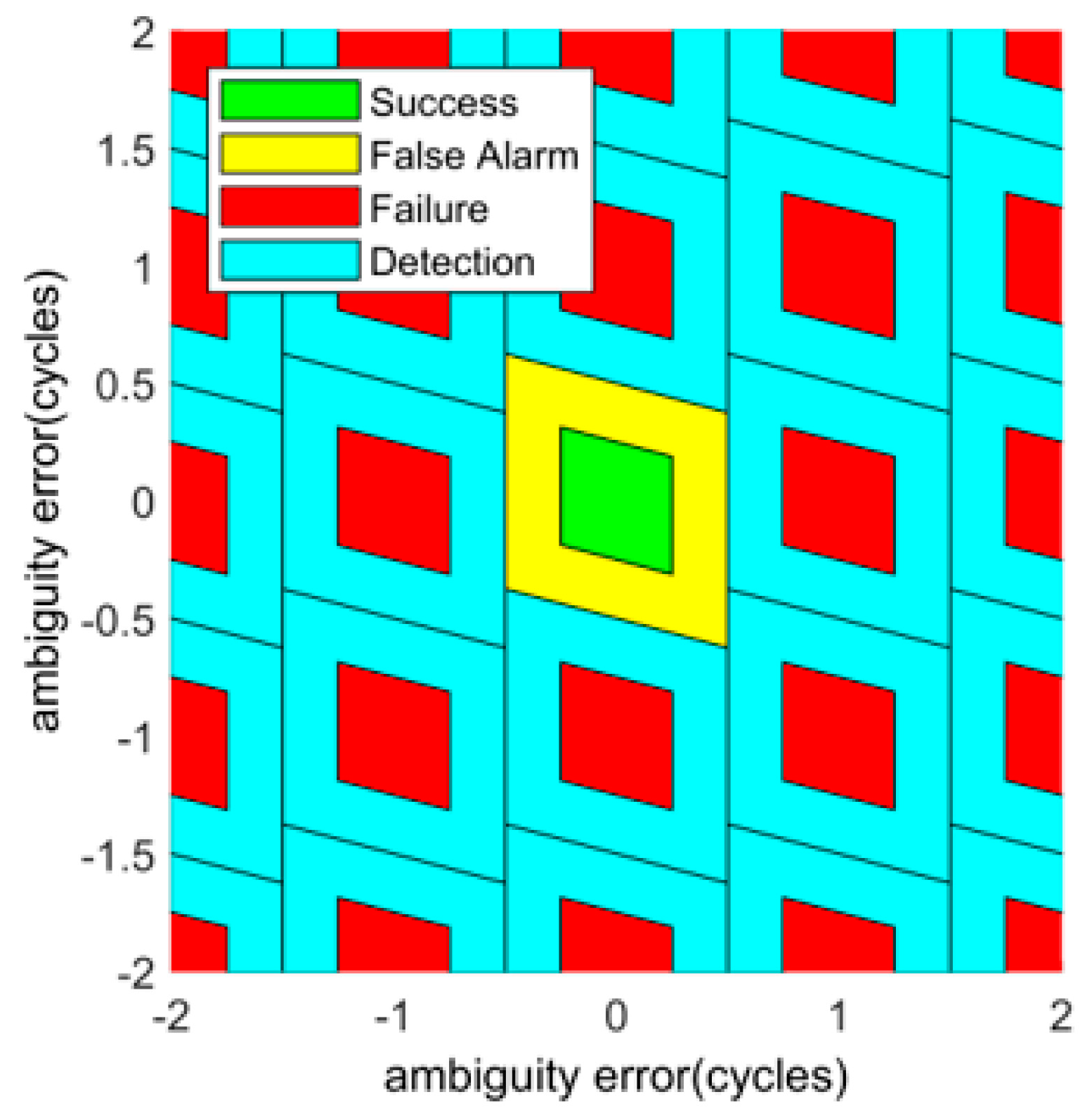
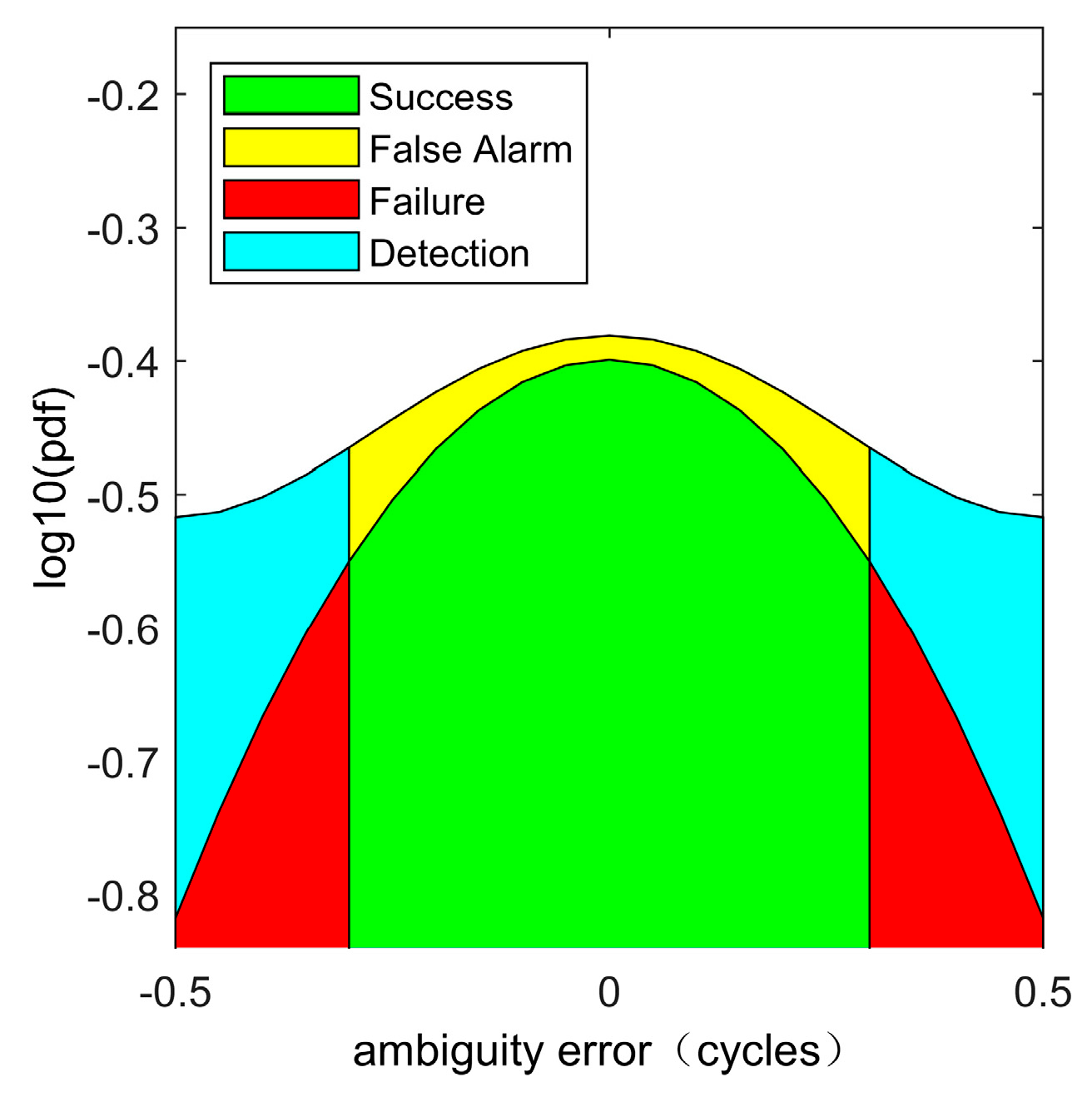
3.1. IAB Events
3.2. Simplified Function to Compute the Upper Bound of Failure Rate
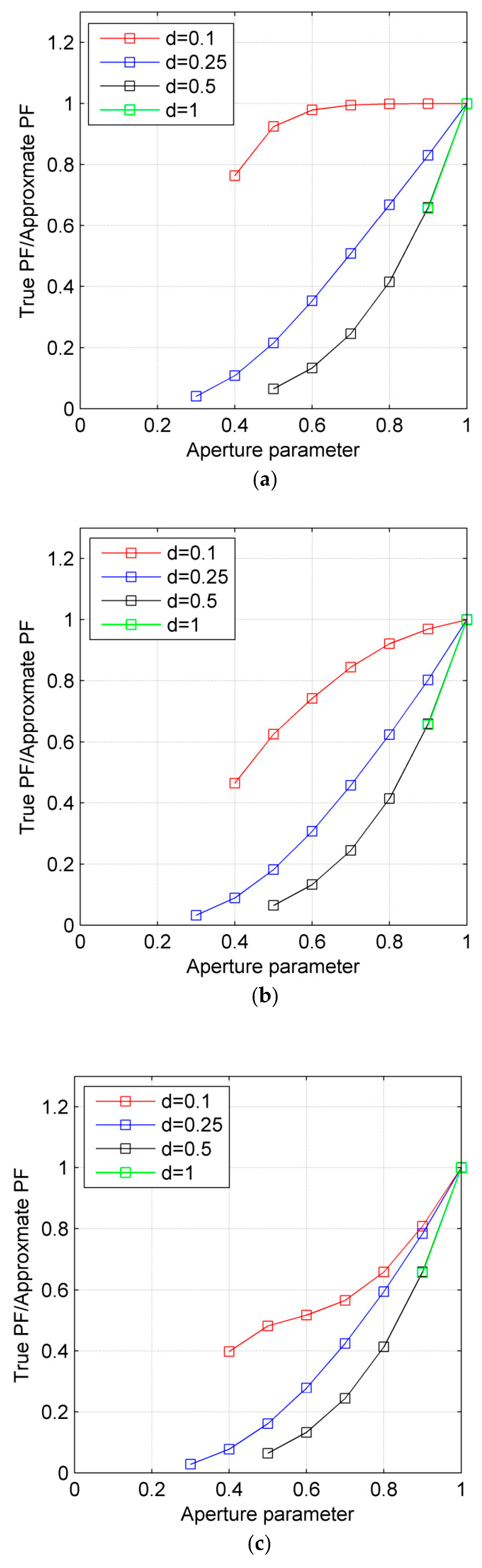
- (a)
- The approximate is always higher than the true , so the simplified function (19) can obtain the upper bound on the failure rate.
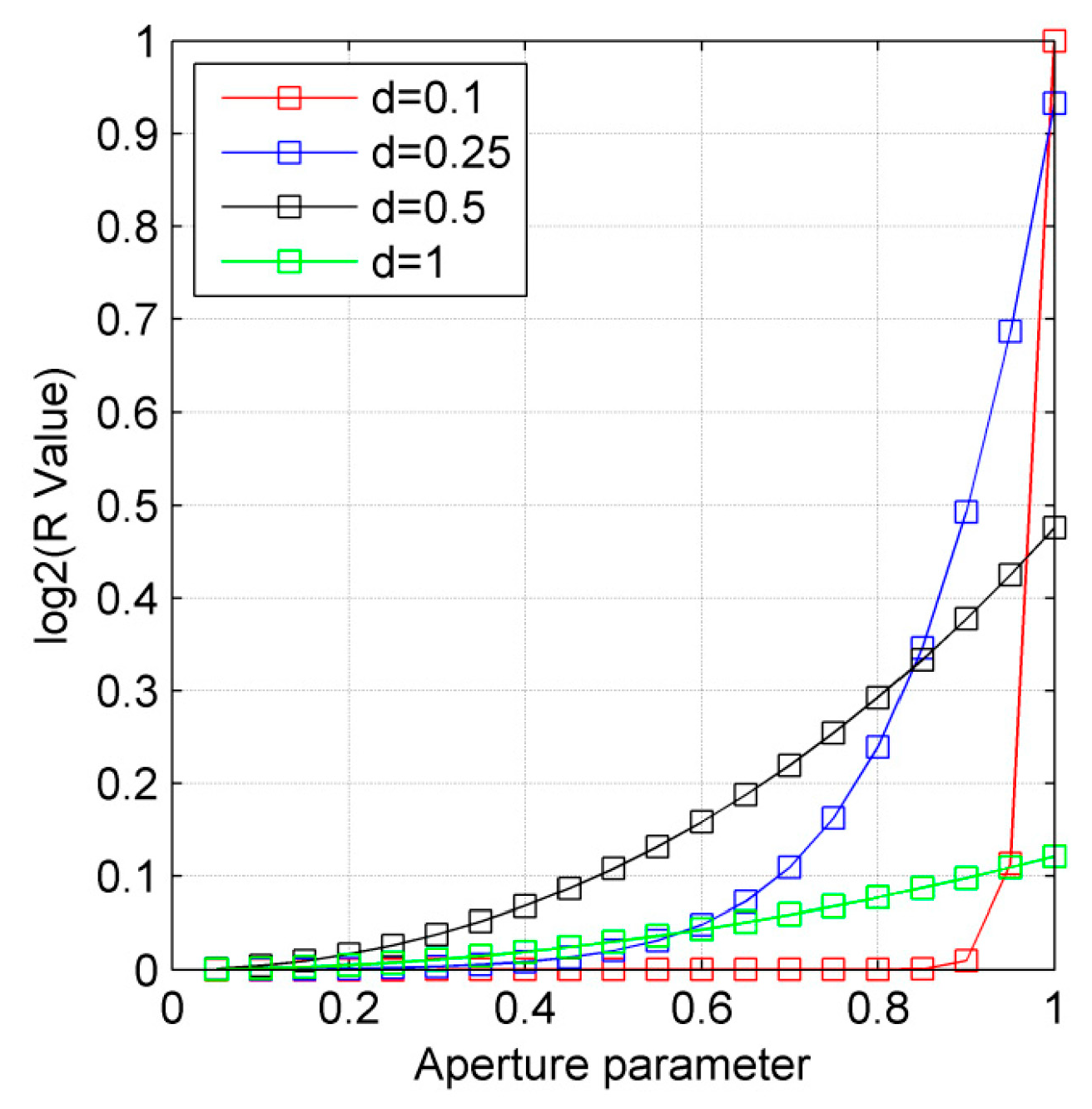
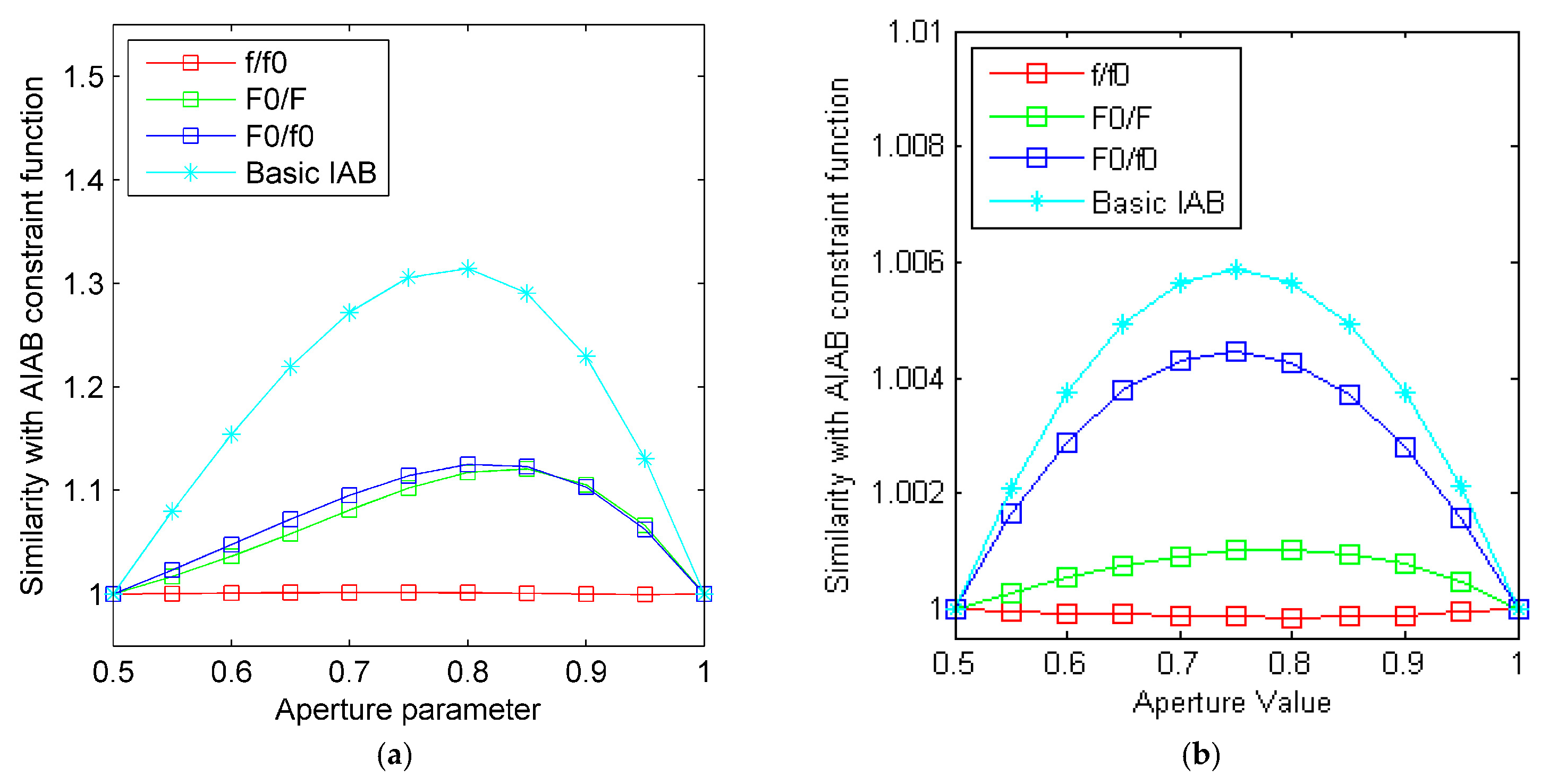
- (b)
- The accuracy of the approximation of the failure rate is proportional to the aperture parameter value and inversely proportional to the conditional variance value and correlation value, with the range of the correlation value being 0 to 0.5.
3.3. Probabilities of the Other IAB Events
- (a)
- The missing detection rate, , is the conditional probability of a failure event given the event that occurs upon acceptance of any integer:
- (b)
- The false-detection rate, , is the conditional probability of a false-alarm event given the event that occurs upon rejection of any integer:
4. AIAB Optimal Aperture Shape Based on the Upper Bound on the Failure Rate
4.1. The AIAB Constraint Function
- (a)
- Subject to a given fix rate or a given success rate, locate the minimum of the false-alarm rate, false-detection rate, missed detection rate, and failure rate.
- (b)
- Subject to a given false-alarm rate or a given false-detection rate, locate the minimum of the missed detection rate and failure rate and the maximum of the fix rate and success rate.
- (c)
- Subject to a given missed detection or a given failure rate, locate the minimum of the false-alarm rate and failure rate, and the maximum of the fix rate and success rate.
4.2. The Simplified AIAB Constraint Function
- (a)
- can be expressed as:
- (b)
- can be expressed as:
- (c)
- can be simplified as:
5. Setting AIAB Aperture Size with Data Constraint
5.1. AIAB Approach with Performance Constraint
- (a)
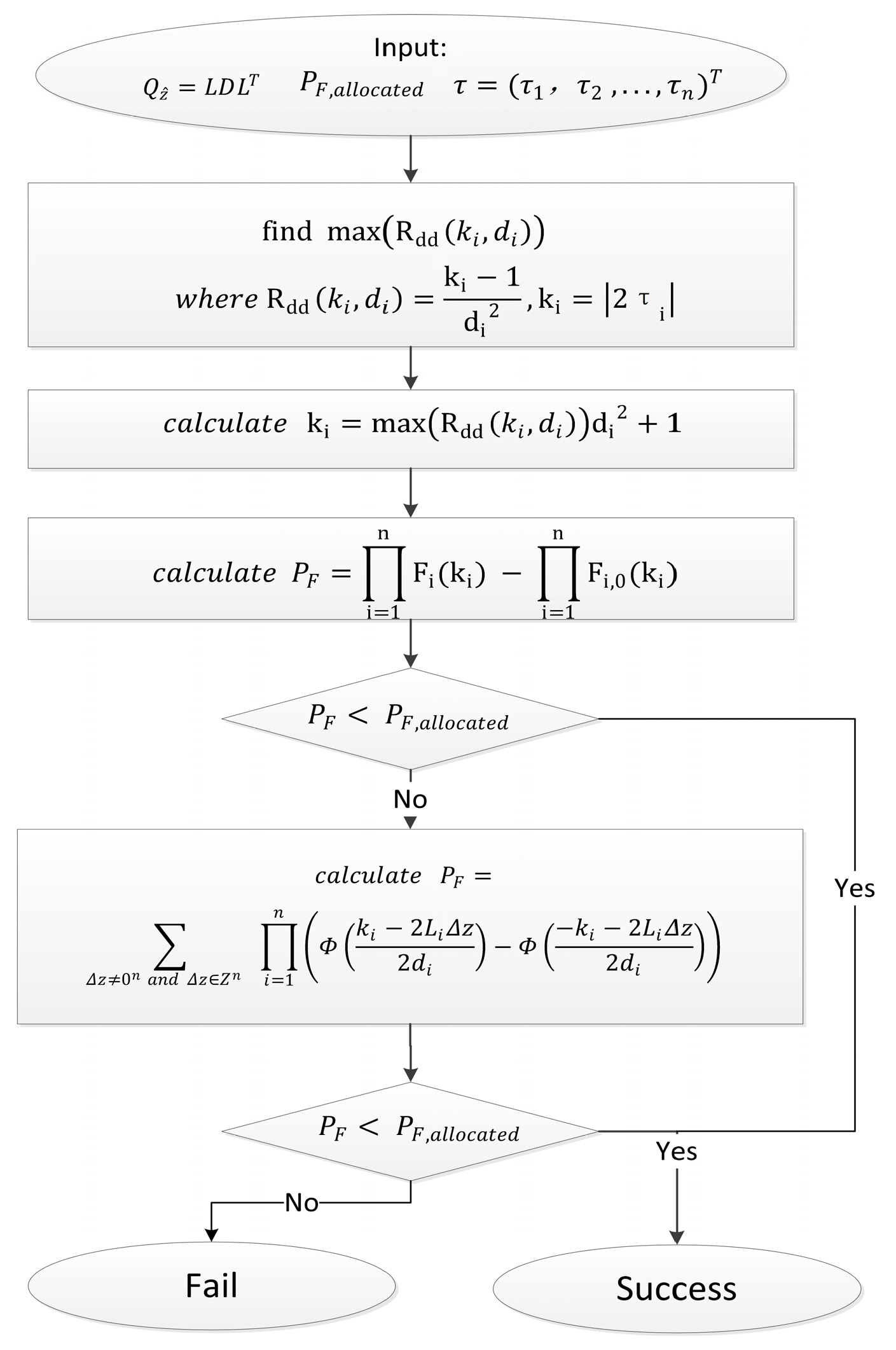
- As the relationship between and the failure rate can be obtained from (12), (19), and (38), can be estimated by a dichotomy search or other methods for a given failure rate.
- (b)
- If is known, the aperture parameter can be solved by (38).
5.2. AIAB Approach with Data Constraint
6. Simulations and Discussion
6.1. The Global CDGNSS Service Performance Simulation
6.1.1. The Simulation Strategy
6.1.2. The Comparison of Actual Failure Rates of Different Methods
6.1.3. The comparison of AIAB, GIAB, and the Basic IAB
6.2. The Monte Carlo Simulation
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rife, J.; Khanafseh, S.; Pullen, S.; De Lorenzo, D.; Kim, U.-S.; Koenig, M.; Chiou, T.-Y.; Kempny, B.; Pervan, B. Navigation, Interference Suppression, and Fault Monitoring in the Sea-Based Joint Precision Approach and Landing System. Proc. IEEE 2008, 96, 1958–1975. [Google Scholar] [CrossRef]
- Joerger, M.; Spenko, M. Towards Navigation Safety for Autonomous Cars. Inside GNSS 2017, 40–49. Available online: https://par.nsf.gov/biblio/10070277 (accessed on 15 July 2022).
- Sassi, I.; El-Koursi, E.-M. On-board train integrity: Safety requirements analysis. In Proceedings of the 29th European Safety and Reliability Conference (ESREL), Hannover, Germany, 22–26 September 2019. [Google Scholar]
- Urquhart, L.; Leandro, R.; Gonzales, P. Integrity for high accuracy GNSS correction services. In Proceedings of the 2019 International Technical Meeting of The Institute of Navigation, Reston, Virginia, 28–31 January 2019; pp. 543–553. [Google Scholar]
- Khanafseh, S.; Pervan, B. New Approach for calculating position domain integrity risk for cycle resolution in carrier phase navigation systems. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 296–307. [Google Scholar] [CrossRef]
- Wu, S.; Peck, S.R.; Fries, R.M.; McGraw, G.A. Geometry extra-redundant almost fixed solutions: A high integrity approach for carrier phase ambiguity resolution for high accuracy relative navigation. In Proceedings of the 2008 IEEE/ION Position, Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2008; pp. 568–582. [Google Scholar]
- Khanafseh, S.; Pervan, B. Detection and mitigation of reference receiver faults in differential carrier phase navigation systems. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2391–2404. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. Success probability of integer GPS ambiguity rounding and bootstrapping. J. Geod. 1998, 72, 606–612. [Google Scholar] [CrossRef]
- Teunissen, P.J. Integer aperture GNSS ambiguity resolution. Artif. Satell. 2003, 38, 79–88. [Google Scholar]
- Han, S. Quality-control issues relating to instantaneous ambiguity resolution for real-time GPS kinematic positioning. J. Geod. 1997, 71, 351–361. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. An optimality property of the integer least-squares estimator. J. Geod. 1999, 73, 587–593. [Google Scholar] [CrossRef]
- Chang, X.-W.; Yang, X.; Zhou, T. MLAMBDA: A modified LAMBDA method for integer least-squares estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef]
- Giorgi, G.; Teunissen, P.J.G. Carrier phase GNSS attitude determination with the Multivariate Constrained LAMBDA method. In Proceedings of the 2010 IEEE Aerospace Conference, Big Sky, MT, USA, 6–13 March 2010; pp. 1–12. [Google Scholar]
- Verhagen, S.; Teunissen, P.J.G. New Global Navigation Satellite System Ambiguity Resolution Method Compared to Existing Approaches. J. Guid. Control Dyn. 2006, 29, 981–991. [Google Scholar] [CrossRef]
- Teunissen, P.; Verhagen, S. The GNSS ambiguity ratio-test revisited: A better way of using it. Surv. Rev. 2009, 41, 138–151. [Google Scholar] [CrossRef]
- Teunissen, P.J. GNSS ambiguity resolution with optimally controlled failure-rate. Artif. Satell. 2005, 40, 219–227. [Google Scholar]
- Verhagen, S.; Teunissen, P.J. The ratio test for future GNSS ambiguity resolution. GPS Solut. 2012, 17, 535–548. [Google Scholar] [CrossRef]
- Wang, L.; Verhagen, S. A new ambiguity acceptance test threshold determination method with controllable failure rate. J. Geod. 2014, 89, 361–375. [Google Scholar] [CrossRef]
- Hou, Y.; Verhagen, S.; Wu, J. An efficient implementation of fixed failure-rate ratio test for gnss ambiguity resolution. Sensors 2016, 16, 945. [Google Scholar] [CrossRef] [PubMed]
- Teunissen, P.J.G. The probability distribution of the ambiguity bootstrapped GNSS baseline. J. Geod. 2001, 75, 267–275. [Google Scholar] [CrossRef]
- Teunissen, P.J. GNSS ambiguity bootstrapping: Theory and applications. In Proceedings of the International Symposium on Kinematic Systems in Geodesy, Geomatics and Navigation, Banff, AB, Canada, 5–8 June 2001; pp. 246–254. [Google Scholar]
- Teunissen, P. Integer aperture bootstrapping: A new GNSS ambiguity estimator with controllable fail-rate. J. Geod. 2005, 79, 389–397. [Google Scholar] [CrossRef]
- Teunissen, P.J. A carrier phase ambiguity estimator with easy-to-evaluate fail-rate. Artif. Satell. 2003, 38, 89–96. [Google Scholar]
- Green, G.N.; King, M.; Humphreys, T. Data-driven generalized integer aperture bootstrapping for real-time high integrity applications. In Proceedings of the 2016 IEEE/ION Position, Location and Navigation Symposium (PLANS), Savannah, GA, USA, 11–14 April 2016; pp. 272–285. [Google Scholar]
- Green, G.N.; Humphreys, T.E. Data-driven generalized integer aperture bootstrapping for high-integrity positioning. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 757–768. [Google Scholar] [CrossRef]
- Green, G.N.; Humphreys, T. Position-domain integrity analysis for generalized integer aperture bootstrapping. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 734–746. [Google Scholar] [CrossRef]
- Li, L.; Li, Z.; Yuan, H.; Wang, L.; Hou, Y. Integrity monitoring-based ratio test for GNSS integer ambiguity validation. GPS Solut. 2016, 20, 573–585. [Google Scholar] [CrossRef]
- Teunissen, P.J.G. The least-squares ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Markley, F.L.; Lightsey, E.G. Global positioning system integer ambiguity resolution without attitude knowledge. J. Guid. Control Dyn. 2007, 30, 346–356. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, M.; Li, T.; Zhang, K. Integer aperture ambiguity resolution based on difference test. J. Geod. 2015, 89, 667–683. [Google Scholar] [CrossRef]
- Liu, X.; Wang, Q.; Zhang, S.; Wu, S. A new efficient fusion positioning method for single-epoch multi-GNSS based on the theoretical analysis of the relationship between ADOP and PDOP. GPS Solut. 2022, 26, 139. [Google Scholar] [CrossRef]
- Verhagen, S.; Li, B.; Teunissen, P.J. Ps-LAMBDA: Ambiguity success rate evaluation software for interferometric applications. Comput. Geosci. 2013, 54, 361–376. [Google Scholar] [CrossRef]
- Li, T.; Zhang, J.; Wu, M.; Zhu, J. Integer aperture estimation comparison between ratio test and difference test: From theory to application. GPS Solut. 2016, 20, 539–551. [Google Scholar] [CrossRef]
- Wang, L.; Feng, Y.; Guo, J. Reliability control of single-epoch RTK ambiguity resolution. GPS Solut. 2016, 21, 591–604. [Google Scholar] [CrossRef]







 represents the AIAB fix rate,
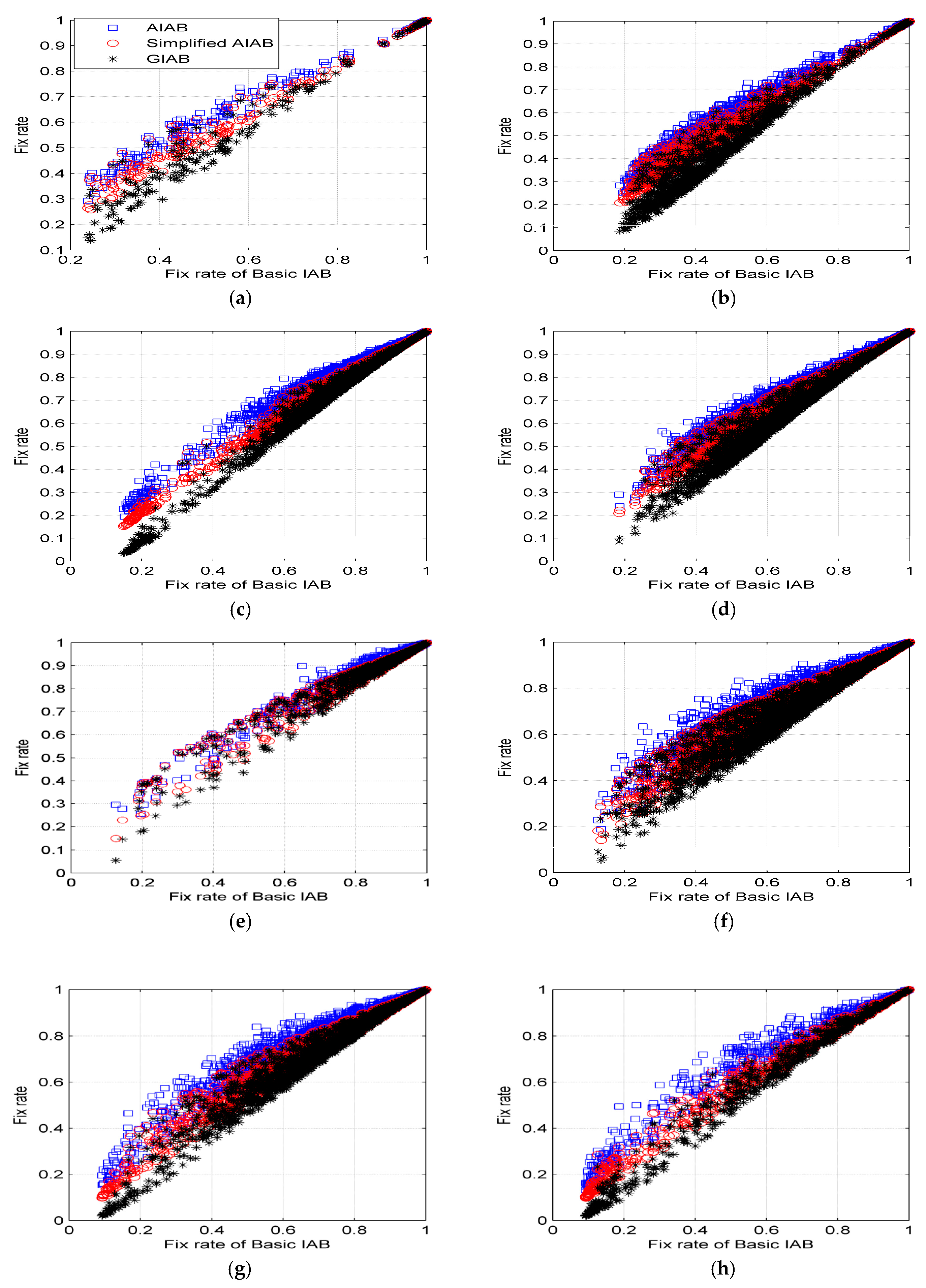
represents the AIAB fix rate,  represents the simplified AIAB fix rate, and
represents the simplified AIAB fix rate, and  represents the GIAB fix rate. (a) The comparison of fix rate with Scheme A1. (b) The comparison of fix rate with Scheme A2. (c) The comparison of fix rate with Scheme A3. (d) The comparison of fix rate with Scheme A4. (e) The comparison of fix rate with Scheme A5. (f) The comparison of fix rate with Scheme A6. (g) The comparison of fix rate with Scheme A7. (h) The comparison of fix rate with Scheme A8.
represents the AIAB fix rate, represents the simplified AIAB fix rate, and represents the GIAB fix rate. (a) The comparison of fix rate with Scheme A1. (b) The comparison of fix rate with Scheme A2. (c) The comparison of fix rate with Scheme A3. (d) The comparison of fix rate with Scheme A4. (e) The comparison of fix rate with Scheme A5. (f) The comparison of fix rate with Scheme A6. (g) The comparison of fix rate with Scheme A7. (h) The comparison of fix rate with Scheme A8.
represents the GIAB fix rate. (a) The comparison of fix rate with Scheme A1. (b) The comparison of fix rate with Scheme A2. (c) The comparison of fix rate with Scheme A3. (d) The comparison of fix rate with Scheme A4. (e) The comparison of fix rate with Scheme A5. (f) The comparison of fix rate with Scheme A6. (g) The comparison of fix rate with Scheme A7. (h) The comparison of fix rate with Scheme A8.
represents the AIAB fix rate, represents the simplified AIAB fix rate, and represents the GIAB fix rate. (a) The comparison of fix rate with Scheme A1. (b) The comparison of fix rate with Scheme A2. (c) The comparison of fix rate with Scheme A3. (d) The comparison of fix rate with Scheme A4. (e) The comparison of fix rate with Scheme A5. (f) The comparison of fix rate with Scheme A6. (g) The comparison of fix rate with Scheme A7. (h) The comparison of fix rate with Scheme A8.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | PF | σΔρ(m) |
|---|---|---|
| A1 | 10−4 | 0.1 |
| A2 | 10−4 | 0.25 |
| A3 | 10−4 | 0.5 |
| A4 | 10−4 | 1.0 |
| A5 | 10−8 | 0.1 |
| A6 | 10−8 | 0.25 |
| A7 | 10−8 | 0.5 |
| A8 | 10−8 | 1.0 |
| Scheme | Maximum (PF/PFS) | Mean (PF/PFS) | Minimum (PF/PFS) |
|---|---|---|---|
| A1 | 1.00 | 0.91 | 0.27 |
| A2 | 1.00 | 0.80 | 0.22 |
| A3 | 1.00 | 0.73 | 0.19 |
| A4 | 1.00 | 0.66 | 0.21 |
| A5 | 1.00 | 0.81 | 0.07 |
| A6 | 1.00 | 0.65 | 0.07 |
| A7 | 1.00 | 0.55 | 0.06 |
| A8 | 1.00 | 0.47 | 0.07 |
| Low (0.2 to 0.6) | Medium (0.6 to 0.9) | High (0.9 to 0.95) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Scheme | |||||||||
| A1 | 1.28 | 1.15 | 0.95 | 1.10 | 1.05 | 1.01 | 1.01 | 1.00 | 1.00 |
| A2 | 1.29 | 1.12 | 0.88 | 1.10 | 1.03 | 1.00 | 1.01 | 1.00 | 1.00 |
| A3 | 1.23 | 1.10 | 0.96 | 1.09 | 1.03 | 1.00 | 1.02 | 1.01 | 1.00 |
| A4 | 1.26 | 1.07 | 0.86 | 1.08 | 1.02 | 1.00 | 1.02 | 1.01 | 1.00 |
| A5 | 1.37 | 1.32 | 1.26 | 1.09 | 1.06 | 1.06 | 1.03 | 1.01 | 1.01 |
| A6 | 1.38 | 1.24 | 1.15 | 1.12 | 1.06 | 1.04 | 1.03 | 1.01 | 1.01 |
| A7 | 1.37 | 1.19 | 1.09 | 1.12 | 1.06 | 1.04 | 1.03 | 1.01 | 1.01 |
| A8 | 1.40 | 1.17 | 1.02 | 1.17 | 1.05 | 1.03 | 1.03 | 1.01 | 1.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Huang, P.; Yu, B.; Wang, L.; Wang, Y.; Sheng, C.; Yi, Q.; Yang, J. Optimized Integer Aperture Bootstrapping for High-Integrity CDGNSS Applications. Remote Sens. 2024, 16, 118. https://doi.org/10.3390/rs16010118
Zhao J, Huang P, Yu B, Wang L, Wang Y, Sheng C, Yi Q, Yang J. Optimized Integer Aperture Bootstrapping for High-Integrity CDGNSS Applications. Remote Sensing. 2024; 16(1):118. https://doi.org/10.3390/rs16010118
Chicago/Turabian StyleZhao, Jingbo, Ping Huang, Baoguo Yu, Lei Wang, Yao Wang, Chuanzhen Sheng, Qingwu Yi, and Jianlei Yang. 2024. "Optimized Integer Aperture Bootstrapping for High-Integrity CDGNSS Applications" Remote Sensing 16, no. 1: 118. https://doi.org/10.3390/rs16010118