
Blind Spots Analysis of Magnetic Tensor Localization Method


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
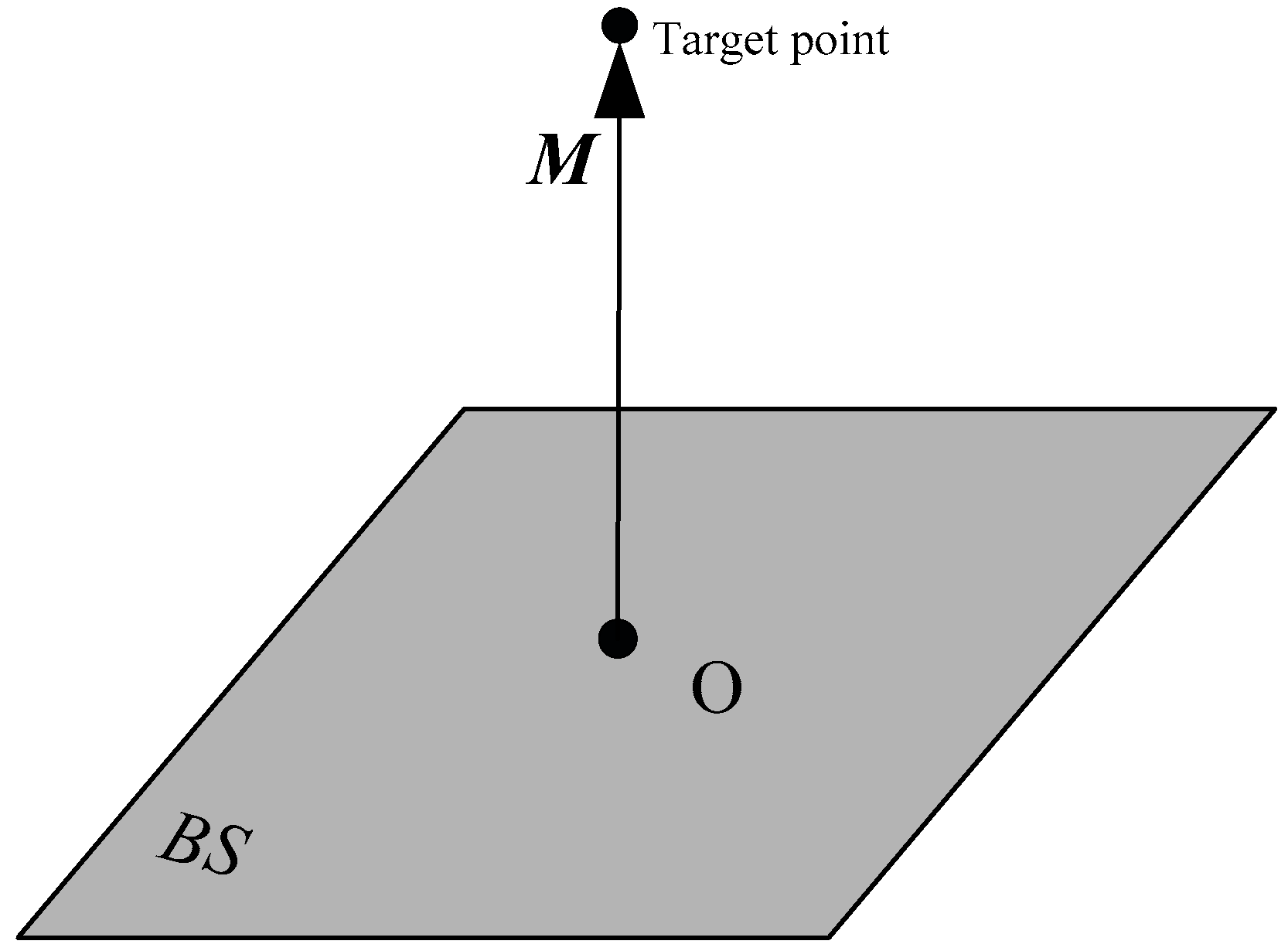
1.1. Model of Magnetic Tensor Localization
Model of STLM
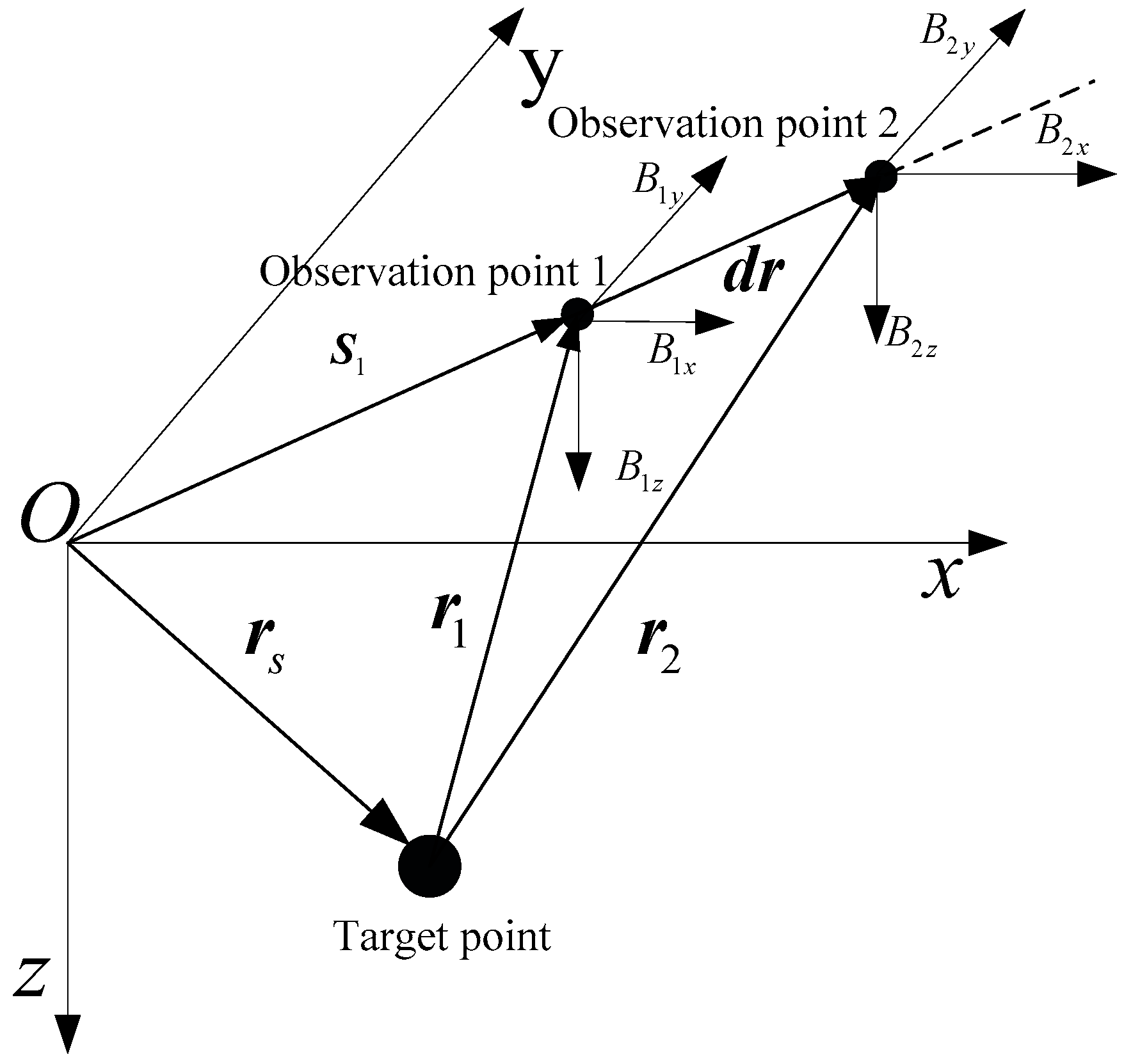
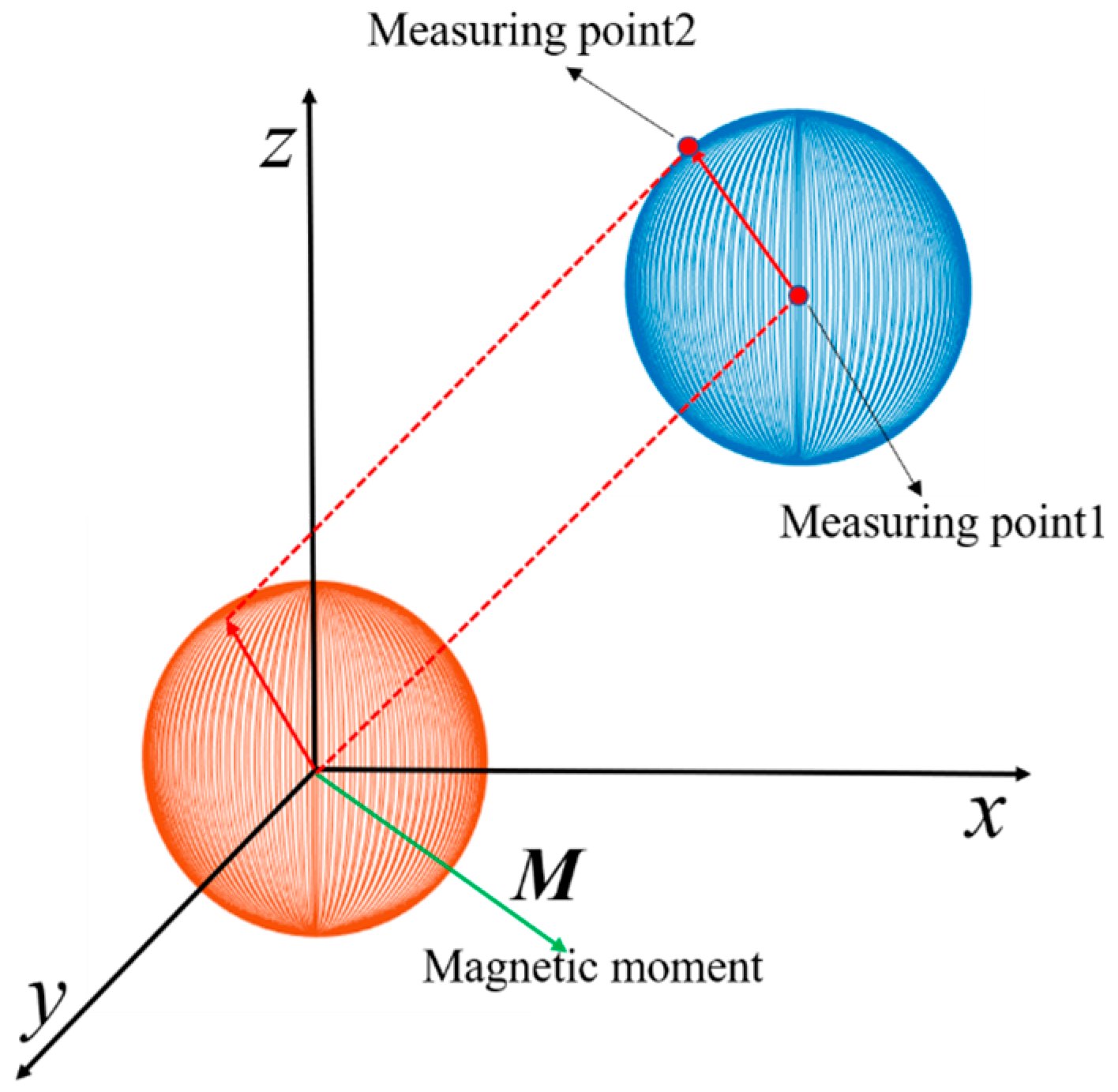
1.2. Model of TTLM
2. Blind Spots Analysis of Location
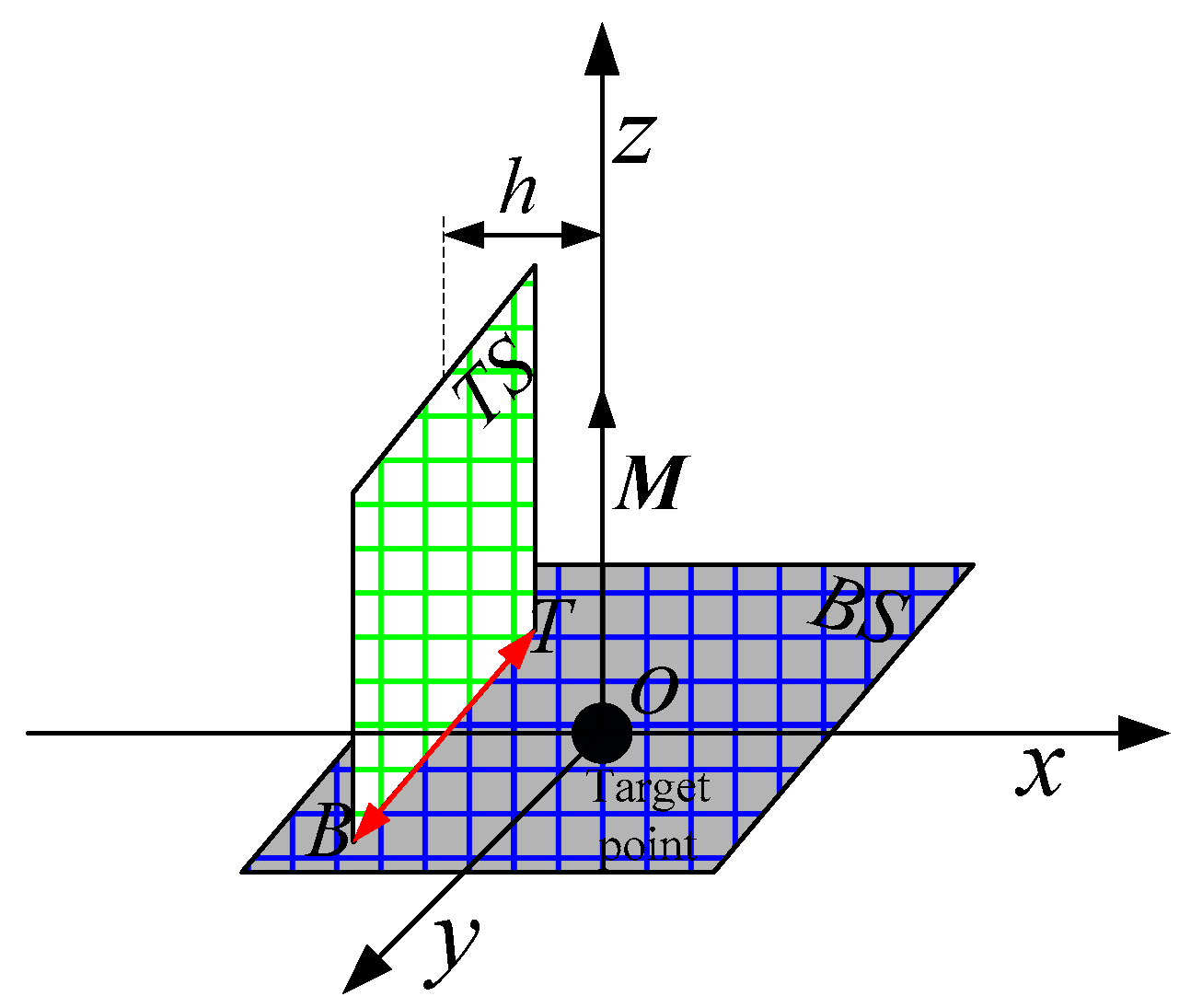
2.1. Blind Spots Analysis of STLM
2.2. Blind Spots Analysis of TTLM
3. Blind Spots Simulation of Location
3.1. Simulation of STLM
3.2. Simulation of TTLM
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sheinker, A.; Ginzburg, B.; Salomonski, N.; Frumkis, L.; Kaplan, B.Z.; Moldwin, M.B. Method for indoor navigation based on magnetic beacons using smartphones and tablets. Measurement 2016, 81, 197–209. [Google Scholar] [CrossRef]
- Yin, G.; Zhang, Y.; Fan, H. Localization and Classification of Multiple Dipole-Like Magnetic Sources Using Magnetic Gradient Tensor Data. J. Appl. Geophys. 2016, 128, 131–139. [Google Scholar]
- Yu, H.; Li, H.; Feng, S. Underwater Continuous Localization Based on Magnetic Dipole Target Using Magnetic Gradient Tensor and Draft Depth. IEEE Geosci. Remote Sens. Lett. 2014, 11, 178–180. [Google Scholar]
- Clark, D.A. New Methods for Interpretation of Magnetic vector and Gradient Tensor Data I: Eigenvector Analysis and the Normalized Source Strength. Explor. Geo-Phys. 2012, 44, 267–282. [Google Scholar] [CrossRef]
- Liu, H.; Wang, X.; Wang, H.; Bin, J.; Dong, H.; Ge, J.; Liu, Z.; Yuan, Z.; Zhu, J.; Luan, X. Magneto-Inductive Magnetic Gradient Tensor System for Detection of Ferromagnetic Objects. IEEE Magn. Lett. 2020, 11, 8101205. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Fan, H.; Li, Z. Preprocessed Method and Application of Magnetic Gradient Tensor Data. IEEE Access 2019, 7, 173738–173752. [Google Scholar] [CrossRef]
- Jeffrey, G.T.; William, D.E. Initial design and testing of a full tensor airborne SQUID magnetometer for detection of unexploded ordnance. Seg Tech. Program Expand. Abstr. 2004, 23, 798–804. [Google Scholar]
- Smith, D.V.; Bracken, R.E. Field experiments with the tensor magnetic gradiometer system for UXO surveys A case history. Seg Tech. Program Expand. Abstr. 2004, 23, 806–809. [Google Scholar]
- Brown, P.J. A case study of magnetic gradient tensor invariants applied to the UXO problem. Seg Tech. Program Expand. Abstr. 2004, 23, 794–797. [Google Scholar]
- Chwala, A.; Schmelz, M.; Zakosarenko, V. Underwater operation of a full tensor SQUID gradiometer system. Supercond. Sci. Technol. 2018, 32, 024003. [Google Scholar] [CrossRef]
- McGary, J. Real-Time Tumor Tracking for Four-Dimensional Computed Tomography Using SQUID Magnetometers. IEEE Trans. Magn. 2009, 45, 3351–3361. [Google Scholar] [CrossRef]
- Stolz, R.; Zakosarenko, V.; Schulz, M.; Chwala, A.; Fritzsch, L.; Meyer, H.G.; Köstlin, E.O. Magnetic full-tensor SQUID gradiometer system for geophysical applications. Lead. Edge 2006, 25, 178–180. [Google Scholar] [CrossRef]
- Ge, J.; Wang, S.; Dong, H.; Liu, H.; Zhou, D.; Wu, S.; Luo, W.; Zhu, J.; Yuan, Z.; Zhang, H. Real-Time Detection of Moving Magnetic Target Using Distributed Scalar Sensor Based on Hybrid Algorithm of Particle Swarm Optimization and Gauss-Newton Method. IEEE Sens. J. 2020, 20, 10717–10723. [Google Scholar] [CrossRef]
- Nara, T.; Suzuki, S.; Ando, S. A Closed-Form Formula for Magnetic Dipole Localization by Measurement of Its Magnetic Field and Spatial Gradients. IEEE Trans. Magn. 2006, 42, 3291–3293. [Google Scholar] [CrossRef]
- Oruc, B. Location and depth estimation of point-dipole and line of dipoles using analytic signals of the magnetic gradient tensor and magnitude of vector components. J. Appl. Geophys. 2010, 70, 27–37. [Google Scholar] [CrossRef]
- Schmidt, P.W.; Clark, D.A. The magnetic gradient tensor:its properties and uses in source characterization. Lead. Edge 2006, 25, 75–78. [Google Scholar] [CrossRef]
- Wynn, W.M.; Frahm, C.P.; Clark, R.H. Advanced superconducting gradiometer magnetometer arrays and a novel signal processing technique. IEEE Trans. Magn. 1975, 11, 701–707. [Google Scholar] [CrossRef]
- Yan, Y.; Ma, Y.; Liu, J. Analysis and Correction of the Magnetometer Position Error in a Cross-Shaped Magnetic Tensor Gradiometer. Sensors 2020, 20, 1290. [Google Scholar] [CrossRef]
- Li, J.; Zhang, Y.; Fan, H.; Li, Z.; Liu, M. Estimating the location of magnetic sources using magnetic gradient tensor data. Explor. Geophys. 2019, 50, 600–612. [Google Scholar] [CrossRef]
- Liu, J.; Li, X.; Zeng, X. A Real-Time Magnetic Dipole Localization Method Based on Cube Magnetometer Array. IEEE Trans. Magn. 2019, 55, 4003609. [Google Scholar] [CrossRef]
- Xu, L.; Gu, H.; Fang, L.; Lin, P.; Lin, C. Magnetic Target Linear Location Method Using Two-Point Gradient Full Tensor. IEEE Trans. Instrum. Meas. 2021, 70, 6007808. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, L.; Huang, X.; Dai, Z.; Yuan, F.; Wang, X.; Fan, J. Blind Spots Analysis of Magnetic Tensor Localization Method. Remote Sens. 2023, 15, 2199. https://doi.org/10.3390/rs15082199
Xu L, Huang X, Dai Z, Yuan F, Wang X, Fan J. Blind Spots Analysis of Magnetic Tensor Localization Method. Remote Sensing. 2023; 15(8):2199. https://doi.org/10.3390/rs15082199
Chicago/Turabian StyleXu, Lei, Xianyuan Huang, Zhonghua Dai, Fuli Yuan, Xu Wang, and Jinyu Fan. 2023. "Blind Spots Analysis of Magnetic Tensor Localization Method" Remote Sensing 15, no. 8: 2199. https://doi.org/10.3390/rs15082199