
Satellite-Based Estimation of Soil Moisture Content in Croplands: A Case Study in Golestan Province, North of Iran

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
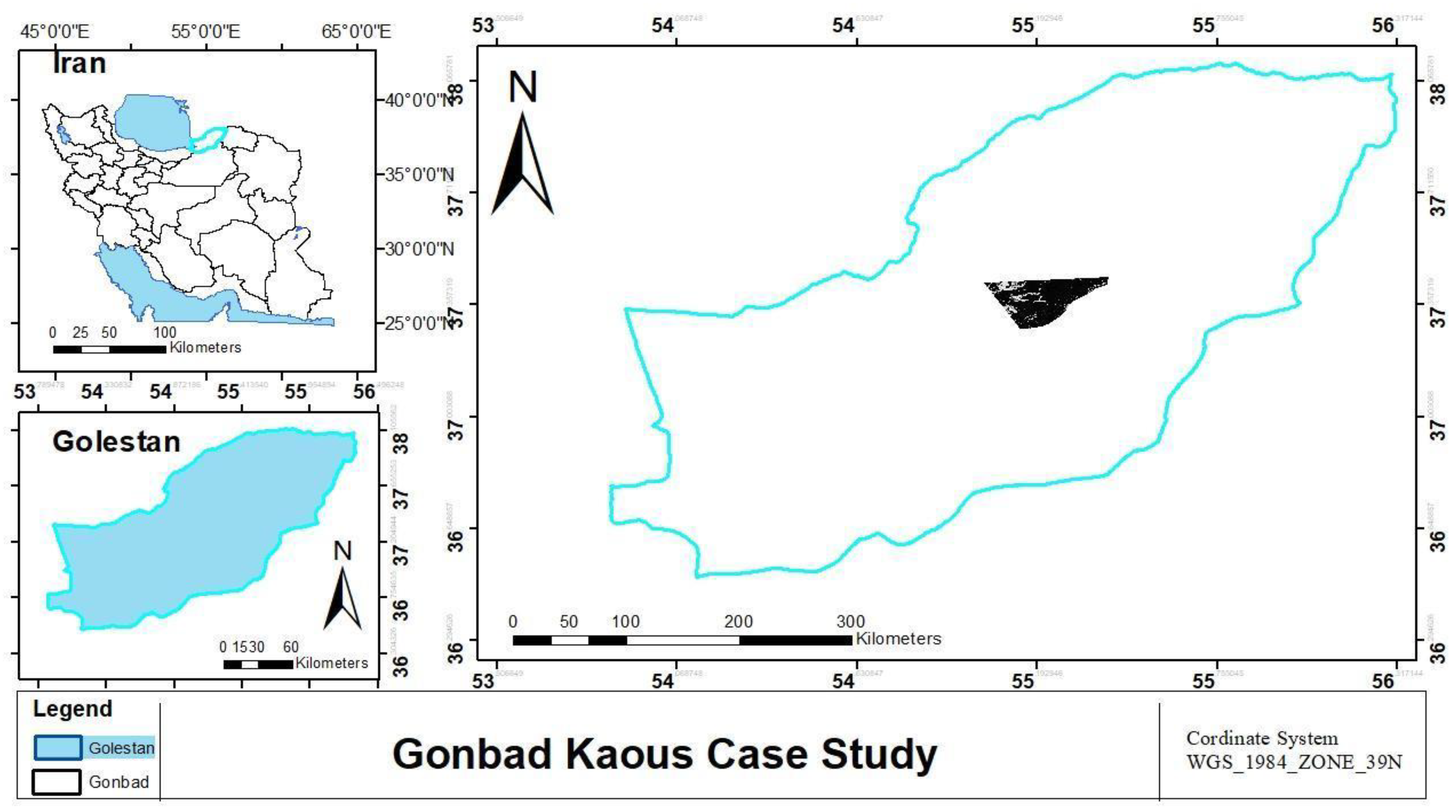
2.1. Study Area
2.2. Field Sampling
- Predetermined points were identified on the ground by a hand-held GPS receiver. Eight random 10 cm deep core soil samples were obtained from 10 m diameter circles that were centered at the above-mentioned points. Eight samples from each point were mixed and combined into one sample.
- Soil samples were collected near the dates of the S2 and L8 acquisitions
- Fields had sparse crop cover at the time of sampling.
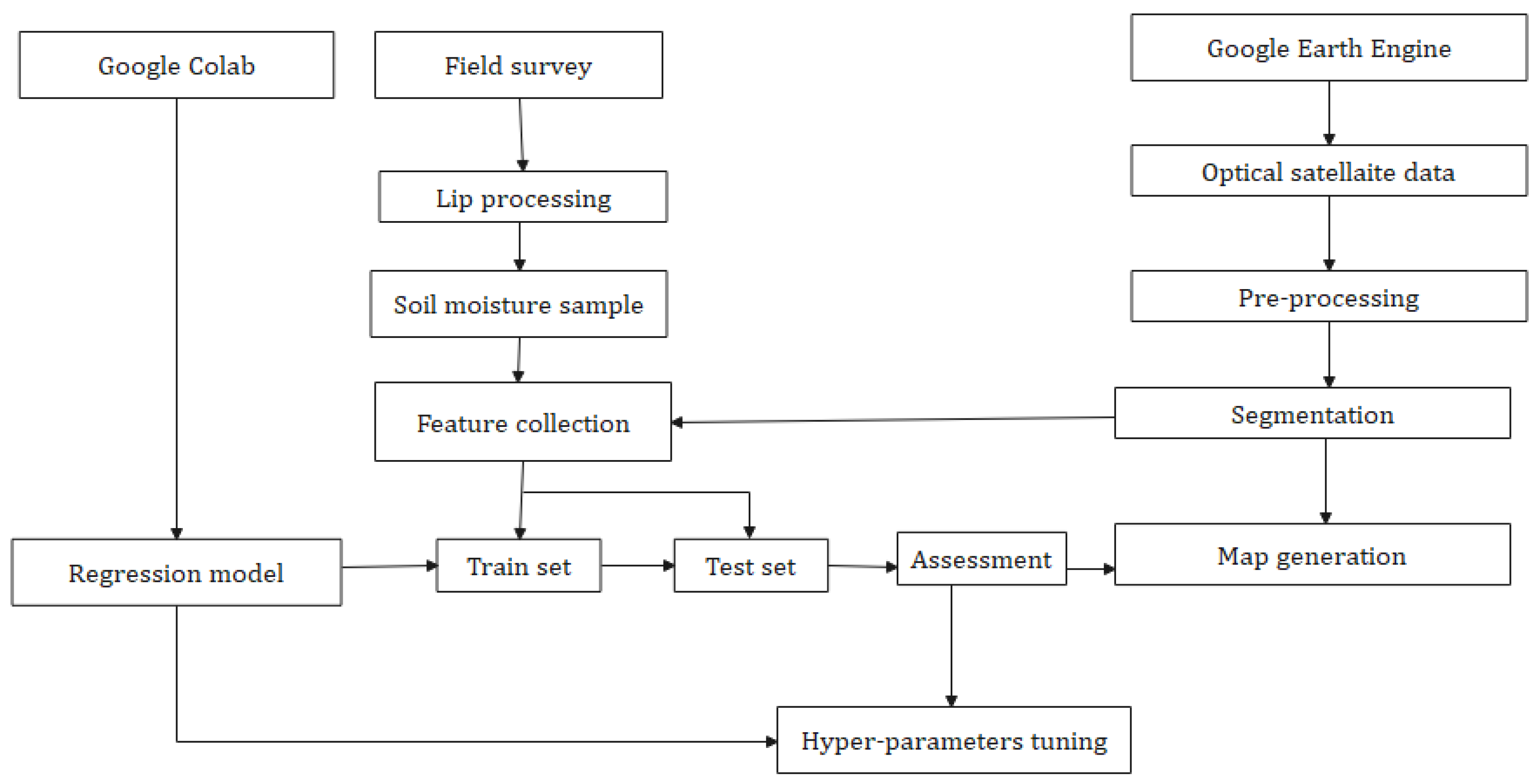
2.3. Methods
2.4. Preprocessing
2.5. Feature Collection: Spectral Indices
2.5.1. Vegetation Index
2.5.2. Soil Indices
2.5.3. Water Indices
2.5.4. Salinity Indices
2.6. Segmentation
2.7. Machine Learning Regression Algorithms
2.8. Train and Test Dataset Partitioning
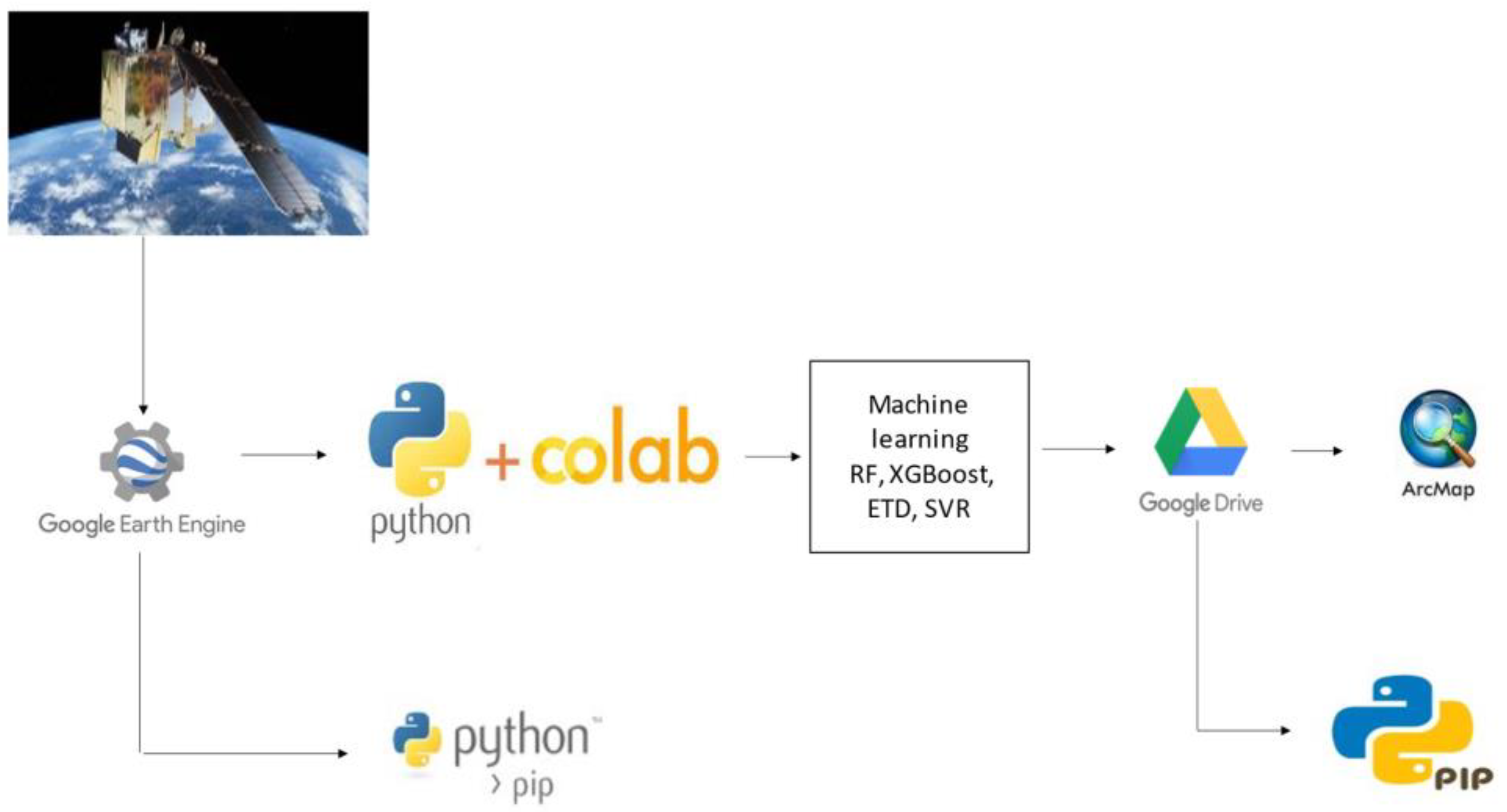
2.9. Implementation Platform
2.10. Hyperparameters Tuning
2.11. Accuracy Assessments
2.12. Uncertainty
3. Results
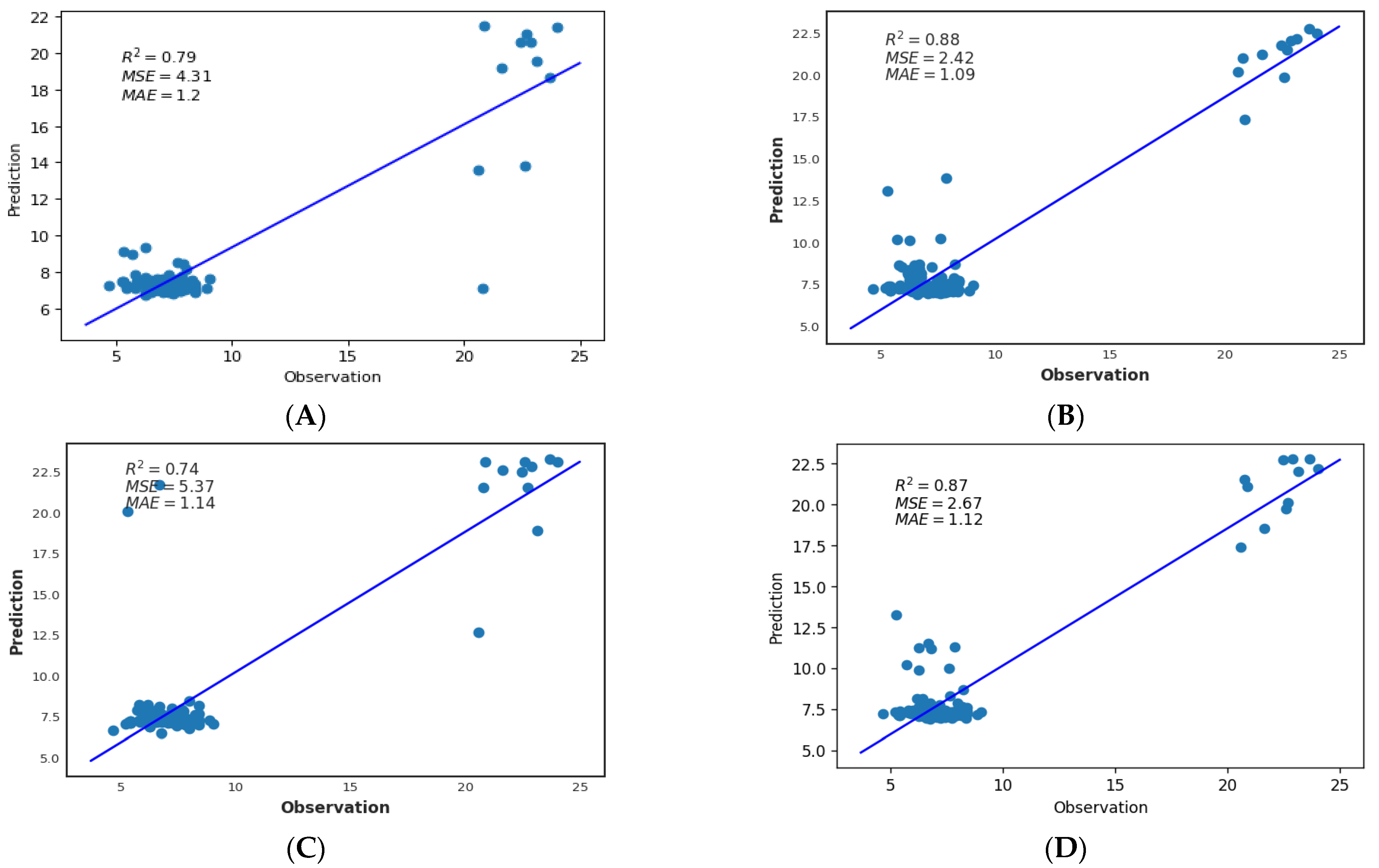
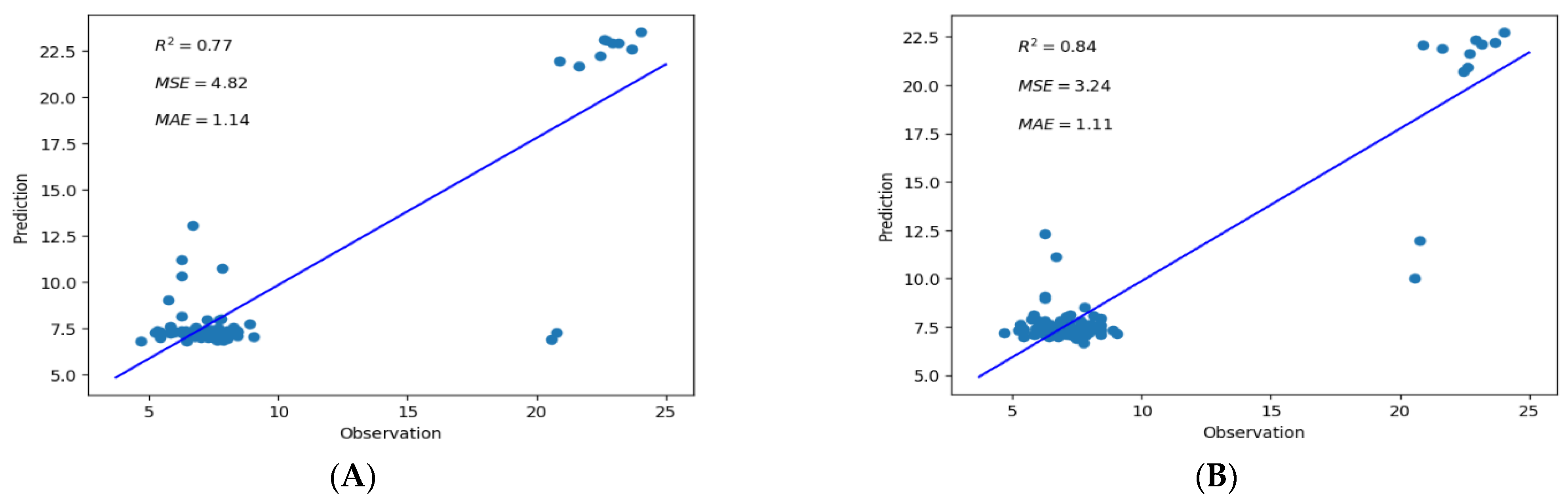
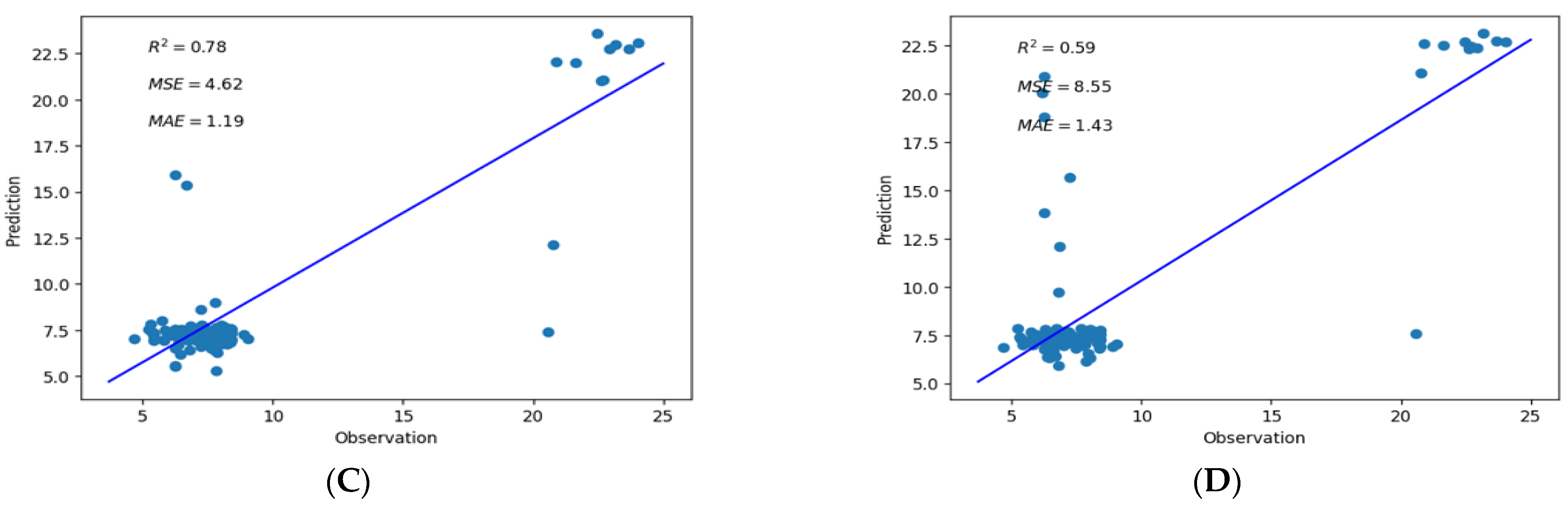
3.1. Model Performance with L8 and S2
3.2. Uncertainty Analysis of Prediction Soil Moisture Based on Machine Learning
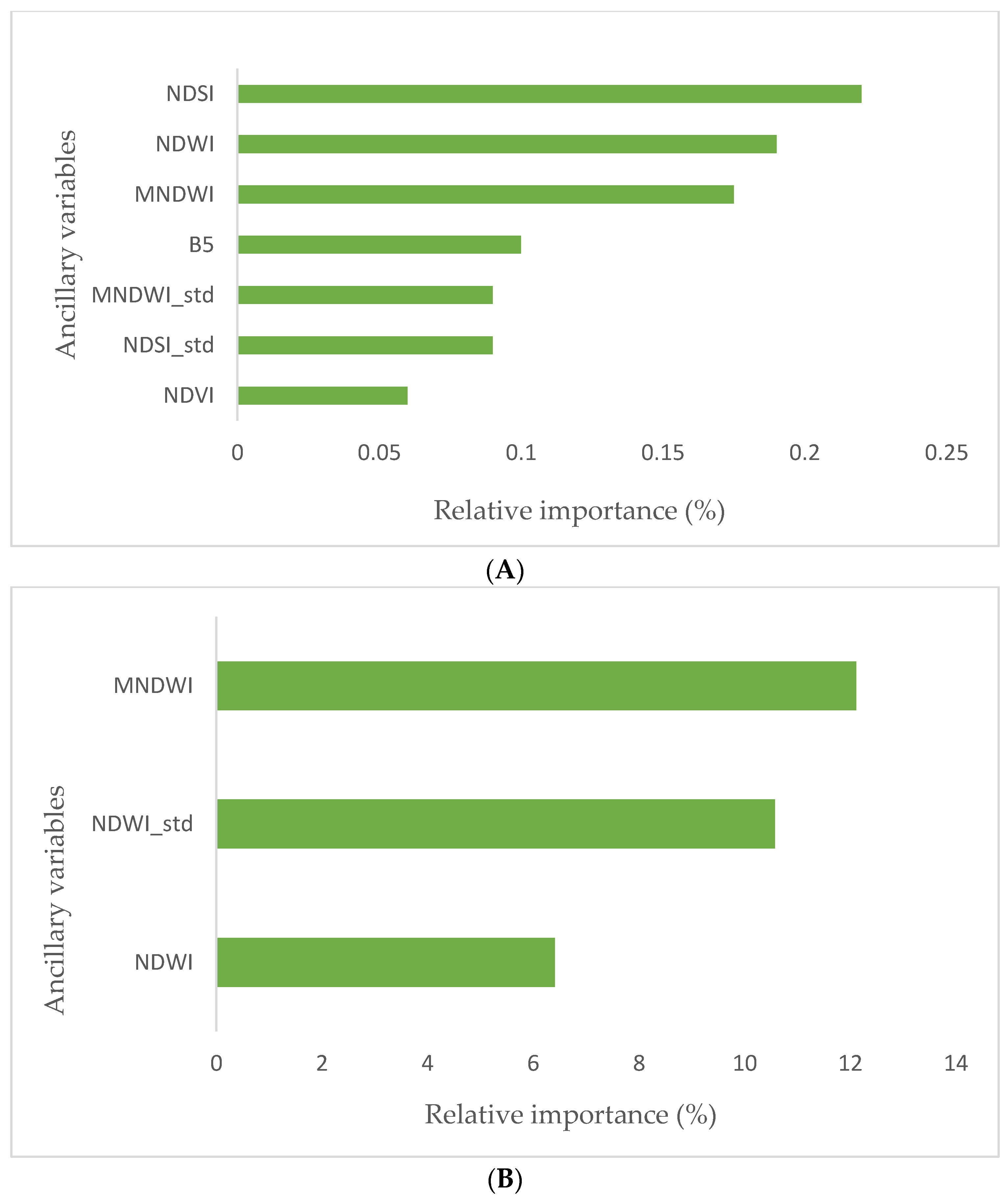
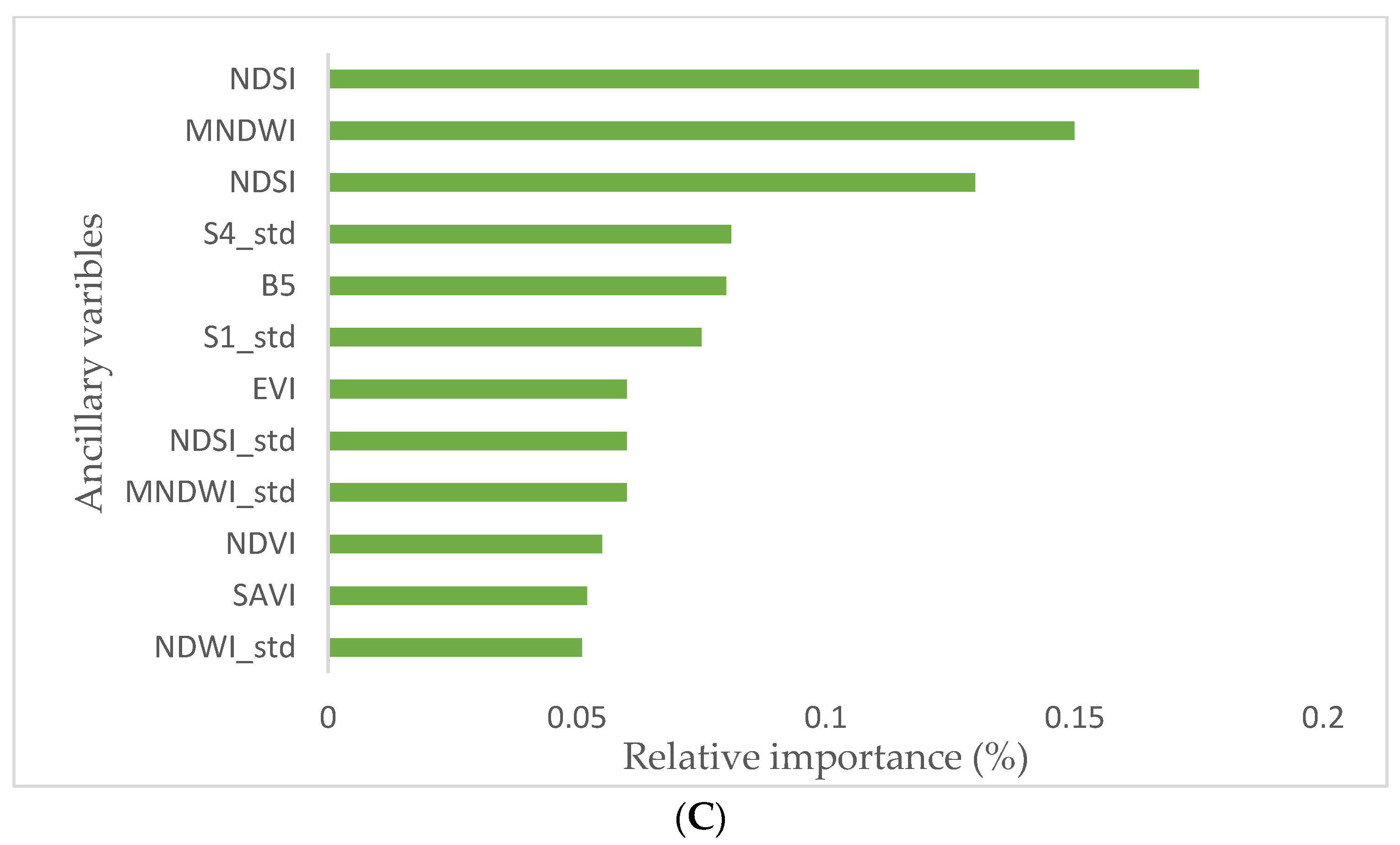
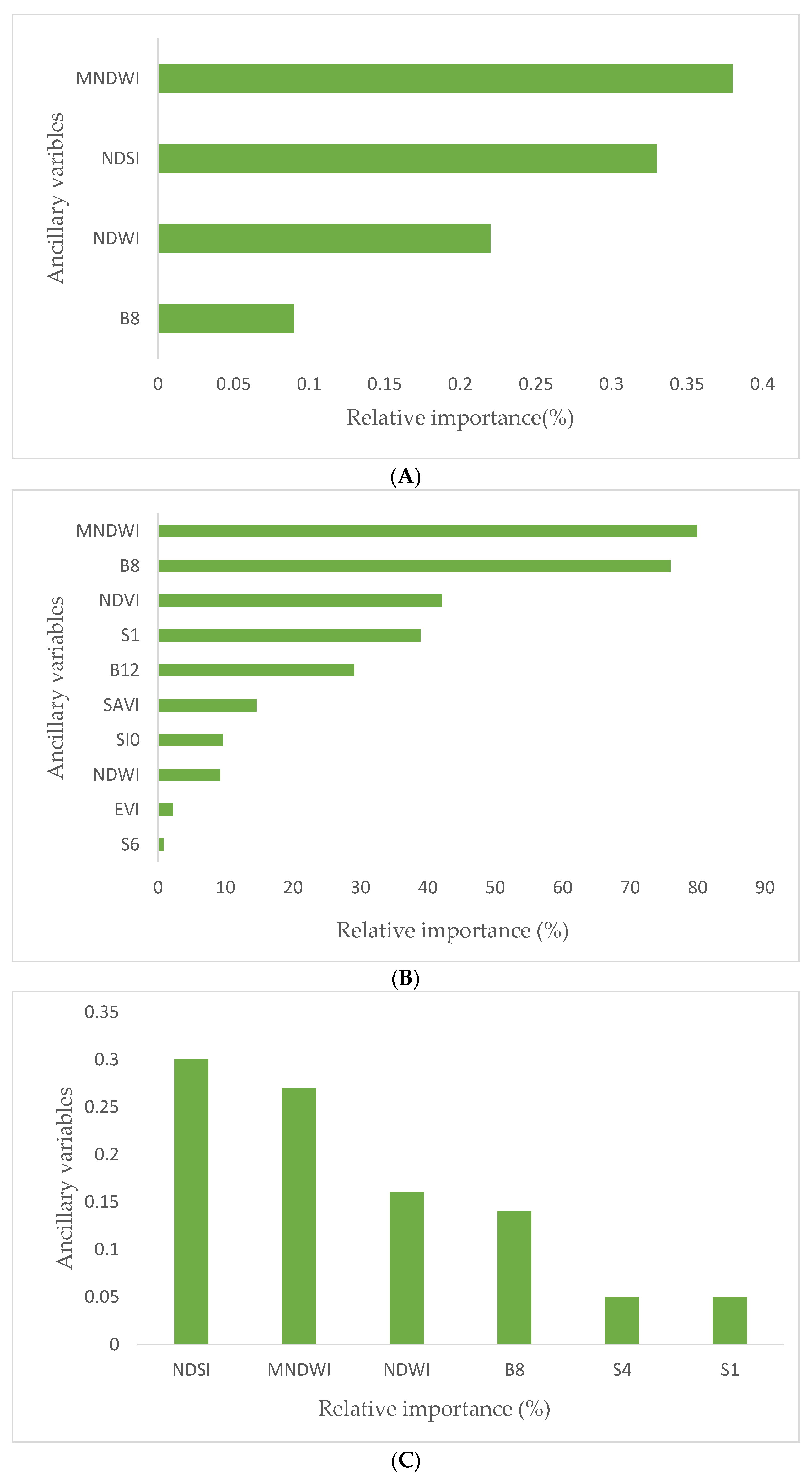
3.3. Feature Importance with L8 and S2
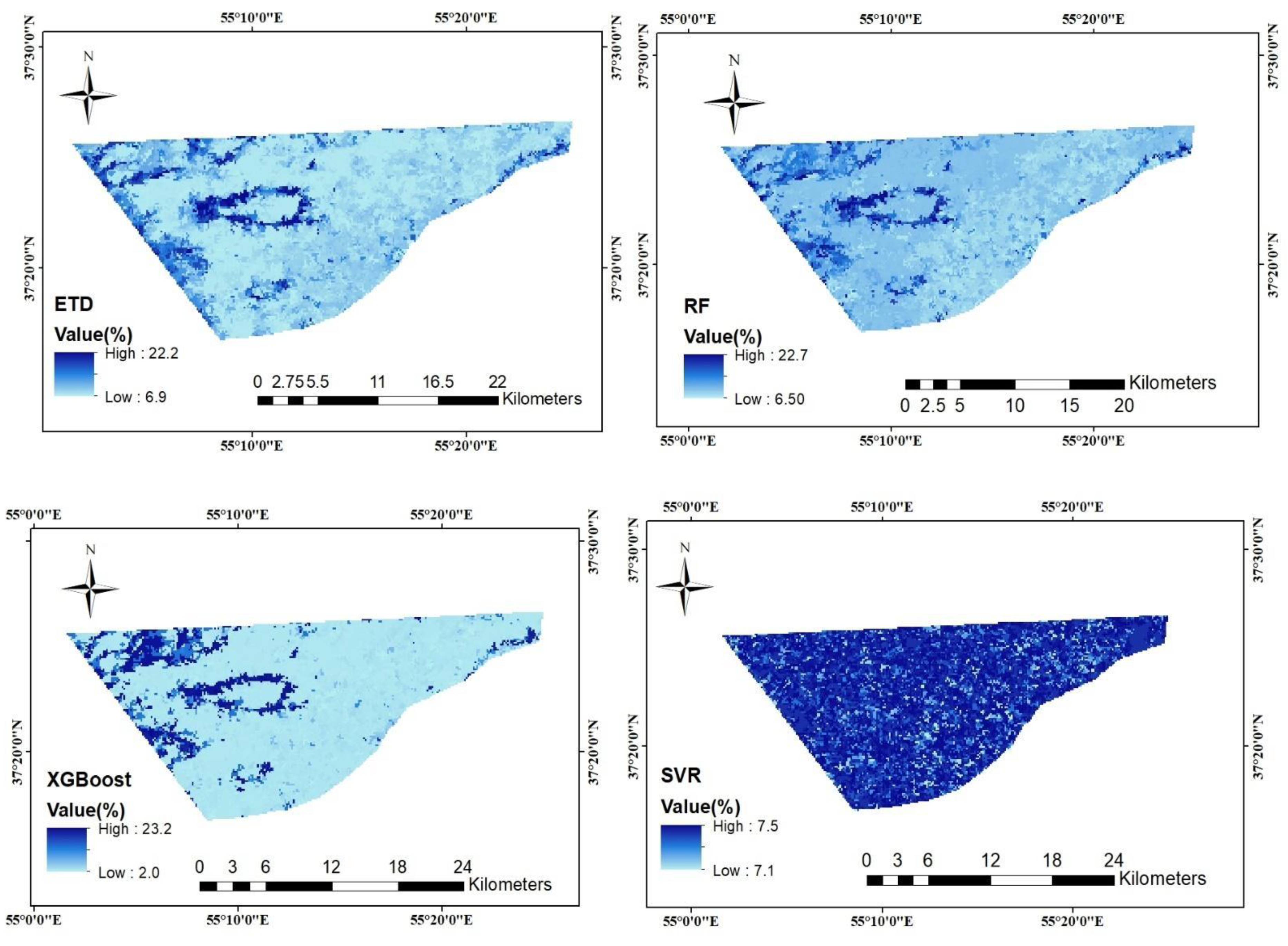
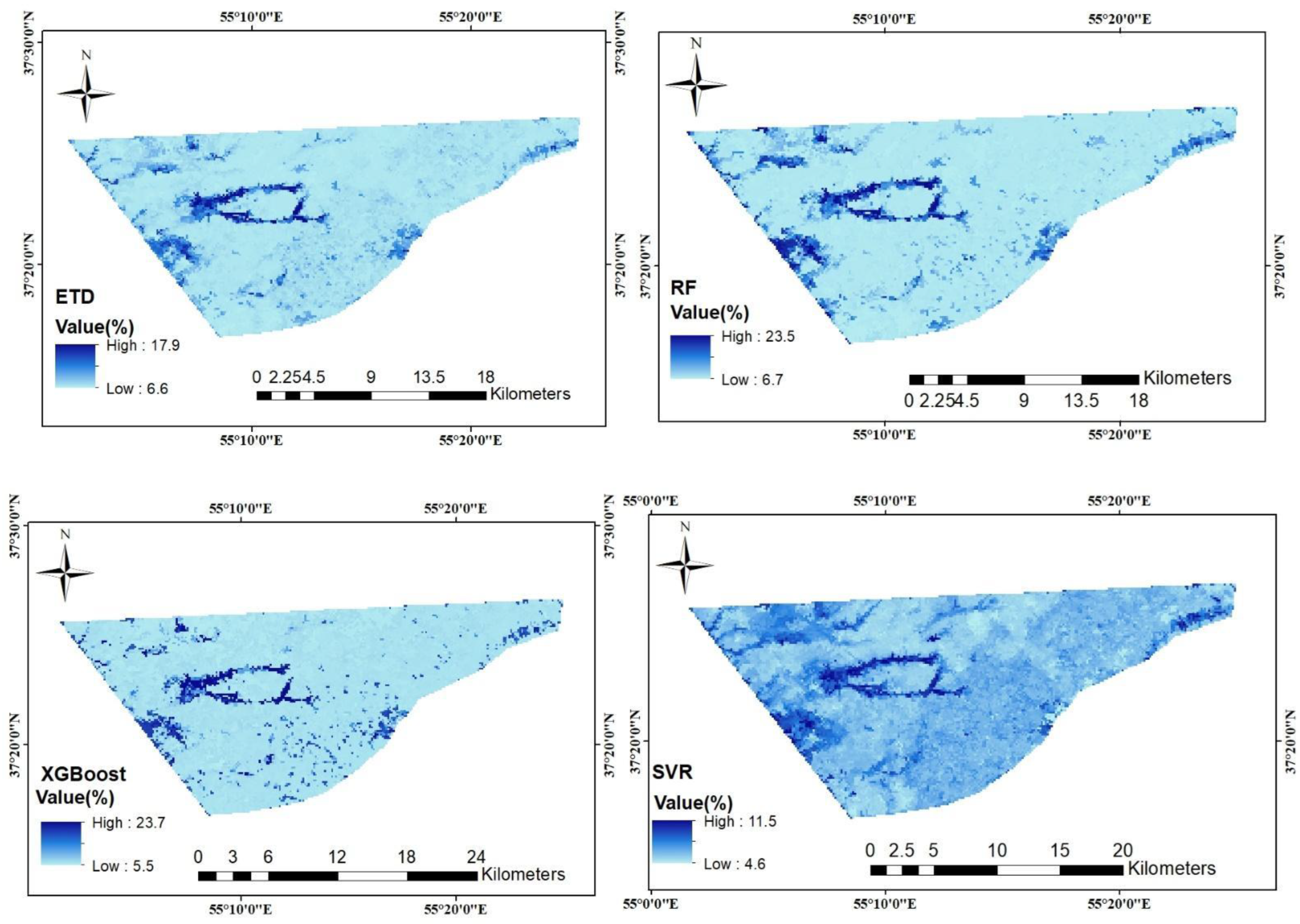
3.4. Generating SMC Map from L8 and S2 Images
3.5. Discussion
- a.
- The study only focuses on a specific region, i.e., Golestan province, north of Iran, which may limit the generalizability of the findings to other regions with different soil and vegetation characteristics.
- b.
- The study used only optical satellite imagery, which may not be optimal for estimating soil moisture content, especially in areas with dense vegetation cover or cloud cover. Other types of satellite imagery, such as microwave or thermal infrared, could provide complementary information and improve the accuracy of soil moisture estimates.
- c.
- The study used a limited number of machine learning algorithms and feature selection techniques, which may not capture the full complexity of the soil moisture estimation problem.
- d.
- The study did not consider the irrigation practices, or other factors that could affect soil moisture dynamics in the region.
- e.
- To minimize the impact of active evapotranspiration on the soil moisture retrievals, this study conducted sampling in cropland areas when fields had sparse crop cover, and utilized the relevant satellite data. While this approach was suitable for the goal of studying the impact of drainage, it may not be recommended for temporal studies, particularly when the crop cover is dense.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kinouchi, T.; Sayama, T. A comprehensive assessment of water storage dynamics and hydroclimatic extremes in the Chao Phraya River Basin during 2002–2020. J. Hydrol. 2021, 603, 126868. [Google Scholar] [CrossRef]
- Kim, S.; Liu, Y.; Johnson, F.; Sharma, A. A temporal correlation based approach for spatial disaggregation of remotely sensed soil moisture. AGU Fall Meet. Abstr. 2016, 2016, H51H-1606. [Google Scholar]
- Wei, X.; Huang, C.; Wei, N.; Zhao, H.; He, Y.; Wu, X. The impact of freeze–thaw cycles and soil moisture content at freezing on runoff and soil loss. Land Degrad. Dev. 2019, 30, 515–523. [Google Scholar] [CrossRef]
- Jiang, Y.; Weng, Q. Estimation of hourly and daily evapotranspiration and soil moisture using downscaled LST over various urban surfaces. GIScience Remote Sens. 2017, 54, 95–117. [Google Scholar] [CrossRef]
- Lee, C.S.; Park, J.D.; Shin, J.; Jang, J.-D. Improvement of AMSR2 Soil Moisture Products over South Korea. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3839–3849. [Google Scholar] [CrossRef]
- El-Zeiny, A.; El-Kafrawy, S. Assessment of water pollution induced by human activities in Burullus Lake using Landsat 8 operational land imager and GIS. Egypt. J. Remote Sens. Space Sci. 2017, 20, S49–S56. [Google Scholar] [CrossRef]
- Zeri, M.; Williams, K.; Cunha, A.P.M.A.; Cunha-Zeri, G.; Vianna, M.S.; Blyth, E.M.; Marthews, T.R.; Hayman, G.D.; Costa, J.M.; Marengo, J.A.; et al. Importance of including soil moisture in drought monitoring over the Brazilian semiarid region: An evaluation using the JULES model, in situ observations, and remote sensing. Clim. Resil. Sustain. 2022, 1, e7. [Google Scholar] [CrossRef]
- Martínez-Fernández, J.; González-Zamora, A.; Sánchez, N.; Gumuzzio, A.; Herrero-Jiménez, C. Satellite soil moisture for agricultural drought monitoring: Assessment of the SMOS derived Soil Water Deficit Index. Remote Sens. Environ. 2016, 177, 277–286. [Google Scholar] [CrossRef]
- Brocca, L.; Morbidelli, R.; Melone, F.; Moramarco, T. Soil moisture spatial variability in experimental areas of central Italy. J. Hydrol. 2007, 333, 356–373. [Google Scholar] [CrossRef]
- Aubert, D.; Loumagne, C.; Oudin, L. Sequential assimilation of soil moisture and streamflow data in a conceptual rainfall–runoff model. J. Hydrol. 2003, 280, 145–161. [Google Scholar] [CrossRef]
- Huete, A.R.; Liu, H.Q.; Batchily, K.V.; van Leeuwen, W. A comparison of vegetation indices over a global set of TM images for EOS-MODIS. Remote Sens. Environ. 1997, 59, 440–451. [Google Scholar] [CrossRef]
- Li, Z.-L.; Leng, P.; Zhou, C.; Chen, K.-S.; Zhou, F.-C.; Shang, G.-F. Soil moisture retrieval from remote sensing measurements: Current knowledge and directions for the future. Earth-Sci. Rev. 2021, 218, 103673. [Google Scholar] [CrossRef]
- Prakash, R.; Singh, D.; Pathak, N.P. A Fusion Approach to Retrieve Soil Moisture with SAR and Optical Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 5, 196–206. [Google Scholar] [CrossRef]
- Johnson, A. Methods of Measuring Soil Moisture in the Field; US Department of the Interior, US Geological Survey: Washington, DC, USA, 1962. [Google Scholar] [CrossRef]
- Mekonnen, D.F. Satellite Remote Sensing for Soil Moisture Estimation: Gumara Catchment, Ethiopia; University of Twente: Schede, The Netherlands, 2009; Available online: https://purl.utwente.nl/essays/93086 (accessed on 20 March 2009).
- Lobell, D.B.; Asner, G.P. Moisture Effects on Soil Reflectance. Soil Sci. Soc. Am. J. 2002, 66, 722–727. [Google Scholar] [CrossRef]
- Taghadosi, M.M.; Hasanlou, M.; Eftekhari, K. Soil salinity mapping using dual-polarized SAR Sentinel-1 imagery. Int. J. Remote Sens. 2019, 40, 237–252. [Google Scholar] [CrossRef]
- Ågren, A.M.; Larson, J.; Paul, S.S.; Laudon, H.; Lidberg, W. Use of multiple LIDAR-derived digital terrain indices and machine learning for high-resolution national-scale soil moisture mapping of the Swedish forest landscape. Geoderma 2021, 404, 115280. [Google Scholar] [CrossRef]
- Fathololoumi, S.; Vaezi, A.R.; Alavipanah, S.K.; Ghorbani, A.; Saurette, D.; Biswas, A. Effect of multi-temporal satellite images on soil moisture prediction using a digital soil mapping approach. Geoderma 2021, 385, 114901. [Google Scholar] [CrossRef]
- Araya, S.N.; Fryjoff-Hung, A.; Anderson, A.; Viers, J.H.; Ghezzehei, T.A. Advances in soil moisture retrieval from multispectral remote sensing using unoccupied aircraft systems and machine learning techniques. Hydrol. Earth Syst. Sci. 2021, 25, 2739–2758. [Google Scholar] [CrossRef]
- Szabó, B.; Szatmári, G.; Takács, K.; Laborczi, A.; Makó, A.; Rajkai, K.; Pásztor, L. Mapping soil hydraulic properties using random-forest-based pedotransfer functions and geostatistics. Hydrol. Earth Syst. Sci. 2019, 23, 2615–2635. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, S.; Zhu, Z.; Ma, H.; He, T. Soil moisture content retrieval from Landsat 8 data using ensemble learning. ISPRS J. Photogramm. Remote Sens. 2022, 185, 32–47. [Google Scholar] [CrossRef]
- Hssaine, B.A.; Chehbouni, A.; Er-Raki, S.; Khabba, S.; Ezzahar, J.; Ouaadi, N.; Ojha, N.; Rivalland, V.; Merlin, O. On the Utility of High-Resolution Soil Moisture Data for Better Constraining Thermal-Based Energy Balance over Three Semi-Arid Agricultural Areas. Remote Sens. 2021, 13, 727. [Google Scholar] [CrossRef]
- Nketia, K.; Asabere, S.; Ramcharan, A.; Herbold, S.; Erasmi, S.; Sauer, D. Spatio-temporal mapping of soil water storage in a semi-arid landscape of northern Ghana—A multi-tasked ensemble machine-learning approach. Geoderma 2022, 410, 115691. [Google Scholar] [CrossRef]
- Adab, H.; Morbidelli, R.; Saltalippi, C.; Moradian, M.; Ghalhari, G.A.F. Machine Learning to Estimate Surface Soil Moisture from Remote Sensing Data. Water 2020, 12, 3223. [Google Scholar] [CrossRef]
- Jia, Y.; Jin, S.; Savi, P.; Yan, Q.; Li, W. Modeling and Theoretical Analysis of GNSS-R Soil Moisture Retrieval Based on the Random Forest and Support Vector Machine Learning Approach. Remote Sens. 2020, 12, 3679. [Google Scholar] [CrossRef]
- Wang, B.; Waters, C.; Orgill, S.; Cowie, A.; Clark, A.; Liu, D.L.; Simpson, M.; McGowen, I.; Sides, T. Estimating soil organic carbon stocks using different modelling techniques in the semi-arid rangelands of eastern Australia. Ecol. Indic. 2018, 88, 425–438. [Google Scholar] [CrossRef]
- Zhang, Y.; Sui, B.; Shen, H.; Ouyang, L. Mapping stocks of soil total nitrogen using remote sensing data: A comparison of random forest models with different predictors. Comput. Electron. Agric. 2019, 160, 23–30. [Google Scholar] [CrossRef]
- Bandak, S.; Naeini, S.A.R.M.; Zeinali, E.; Bandak, I. Effects of superabsorbent polymer A200 on soil characteristics and rainfed winter wheat growth (Triticum aestivum L.). Arab. J. Geosci. 2021, 14, 1–10. [Google Scholar] [CrossRef]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4651–4660. [Google Scholar] [CrossRef]
- Domiri, D.D. Development of land moisture estimation model using modis infrared, thermal, and evi to detect drought at paddy field. Int. J. Remote Sens. Earth Sci. (IJReSES) 2013, 10, 47–54. [Google Scholar] [CrossRef]
- Douaoui, A.; Gascuel-Odoux, C.; Walter, C. Infiltrabilité et érodibilité de sols salinisés de la plaine du Bas Chéliff (Algérie). Mesures au laboratoire sous simulation de pluie. EGS 2004, 11, 379–392. [Google Scholar]
- Khan, N.M.; Rastoskuev, V.V.; Sato, Y.; Shiozawa, S. Assessment of hydrosaline land degradation by using a simple approach of remote sensing indicators. Agric. Water Manag. 2005, 77, 96–109. [Google Scholar] [CrossRef]
- Abbas, A.; Khan, S.; Hussain, N.; Hanjra, M.A.; Akbar, S. Characterizing soil salinity in irrigated agriculture using a remote sensing approach. Phys. Chem. Earth, Parts A/B/C 2013, 55–57, 43–52. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ 1974, 351, 309. [Google Scholar]
- Alhammadi, M.; Glenn, E. Detecting date palm trees health and vegetation greenness change on the eastern coast of the United Arab Emirates using SAVI. Int. J. Remote Sens. 2008, 29, 1745–1765. [Google Scholar] [CrossRef]
- Dehni, A.; Lounis, M. Remote Sensing Techniques for Salt Affected Soil Mapping: Application to the Oran Region of Algeria. Procedia Eng. 2012, 33, 188–198. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Chen, X.; Yang, D.; Chen, J.; Cao, X. An improved automated land cover updating approach by integrating with downscaled NDVI time series data. Remote Sens. Lett. 2015, 6, 29–38. [Google Scholar] [CrossRef]
- Walker, J.P.; Willgoose, G.R.; Kalma, J.D. In situ measurement of soil moisture: A comparison of techniques. J. Hydrol. 2004, 293, 85–99. [Google Scholar] [CrossRef]
- Li, Q.; Wang, Z.; Shangguan, W.; Li, L.; Yao, Y.; Yu, F. Improved daily SMAP satellite soil moisture prediction over China using deep learning model with transfer learning. J. Hydrol. 2021, 600, 126698. [Google Scholar] [CrossRef]
- Huete, A.; Justice, C.; van Leeuwen, W. MODIS Vegetation Index (MOD13) Algorithm Theoretical Basis Document, Version. 3.; 1999. Available online: https://modis.gsfc.nasa.gov/data/atbd/atbd_mod13.pdf (accessed on 5 March 2023).
- Tagesson, T.; Fensholt, R.; Huber, S.; Horion, S.; Guiro, I.; Ehammer, A.; Ardö, J. Deriving seasonal dynamics in ecosystem properties of semi-arid savannas using in situ based hyperspectral reflectance. Biogeosciences Discuss. 2015, 12, 4621–4635. [Google Scholar] [CrossRef]
- Li, B.; Wu, S.; Zhang, S.; Liu, X.; Li, G. Fast Segmentation of Vertebrae CT Image Based on the SNIC Algorithm. Tomography 2022, 8, 59–76. [Google Scholar] [CrossRef]
- Carranza, C.; Nolet, C.; Pezij, M.; van der Ploeg, M. Root zone soil moisture estimation with Random Forest. J. Hydrol. 2021, 593, 125840. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the 22nd Acm Sigkdd International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar] [CrossRef]
- Zheng, H.; Yuan, J.; Chen, L. Short-Term Load Forecasting Using EMD-LSTM Neural Networks with a Xgboost Algorithm for Feature Importance Evaluation. Energies 2017, 10, 1168. [Google Scholar] [CrossRef]
- Wei, Z.; Meng, Y.; Zhang, W.; Peng, J.; Meng, L. Downscaling SMAP soil moisture estimation with gradient boosting decision tree regression over the Tibetan Plateau. Remote Sens. Environ. 2019, 225, 30–44. [Google Scholar] [CrossRef]
- He, B.; Jia, B.; Zhao, Y.; Wang, X.; Wei, M.; Dietzel, R. Estimate soil moisture of maize by combining support vector machine and chaotic whale optimization algorithm. Agric. Water Manag. 2022, 267, 107618. [Google Scholar] [CrossRef]
- Yuan, H.; Yang, G.; Li, C.; Wang, Y.; Liu, J.; Yu, H.; Feng, H.; Xu, B.; Zhao, X.; Yang, X. Retrieving Soybean Leaf Area Index from Unmanned Aerial Vehicle Hyperspectral Remote Sensing: Analysis of RF, ANN, and SVM Regression Models. Remote Sens. 2017, 9, 309. [Google Scholar] [CrossRef]
- Ge, X.; Ding, J.; Jin, X.; Wang, J.; Chen, X.; Li, X.; Liu, J.; Xie, B. Estimating Agricultural Soil Moisture Content through UAV-Based Hyperspectral Images in the Arid Region. Remote Sens. 2021, 13, 1562. [Google Scholar] [CrossRef]
- Amani, M.; Mahdavi, S.; Afshar, M.; Brisco, B.; Huang, W.; Mohammad Javad Mirzadeh, S.; White, L.; Banks, S.; Montgomery, J.; Hopkinson, C. Canadian Wetland Inventory using Google Earth Engine: The First Map and Preliminary Results. Remote Sens. 2019, 11, 842. [Google Scholar] [CrossRef]
- Sun, Z.; Guo, H.; Li, X.; Lu, L.; Du, X. Estimating urban impervious surfaces from Landsat-5 TM imagery using multilayer perceptron neural network and support vector machine. J. Appl. Remote Sens. 2011, 5, 053501. [Google Scholar] [CrossRef]
- Elgeldawi, E.; Sayed, A.; Galal, A.R.; Zaki, A.M. Hyperparameter Tuning for Machine Learning Algorithms Used for Arabic Sentiment Analysis. Informatics 2021, 8, 79. [Google Scholar] [CrossRef]
- Probst, P.; Wright, M.N.; Boulesteix, A. Hyperparameters and tuning strategies for random forest. WIREs Data Min. Knowl. Discov. 2019, 9, e1301. [Google Scholar] [CrossRef]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using SPOT-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Keskin, H.; Grunwald, S.; Harris, W.G. Digital mapping of soil carbon fractions with machine learning. Geoderma 2019, 339, 40–58. [Google Scholar] [CrossRef]
- Nolet, C.; Poortinga, A.; Roosjen, P.; Bartholomeus, H.; Ruessink, G. Measuring and Modeling the Effect of Surface Moisture on the Spectral Reflectance of Coastal Beach Sand. PLoS ONE 2014, 9, e112151. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Xu, X.; Wang, J.; Yang, H.; Huang, W.; Feng, H. A method of estimating soil moisture based on the linear decomposition of mixture pixels. Math. Comput. Model. 2013, 58, 606–613. [Google Scholar] [CrossRef]
- Acharya, U.; Daigh, A.L.M.; Oduor, P.G. Factors affecting the use of weather station data in predicting surface soil moisture for agricultural applications. Can. J. Soil Sci. 2021, 1–13. [Google Scholar] [CrossRef]
- Kalra, A.; Ahmad, S. Using oceanic-atmospheric oscillations for long lead time streamflow forecasting. Water Resour. Res. 2009, 45, 1–18. [Google Scholar] [CrossRef]
- Achieng, K.O. Modelling of soil moisture retention curve using machine learning techniques: Artificial and deep neural networks vs support vector regression models. Comput. Geosci. 2019, 133, 104320. [Google Scholar] [CrossRef]
- Sánchez-Ruiz, S.; Piles, M.; Sánchez, N.; Martínez-Fernández, J.; Vall-Llossera, M.; Camps, A. Combining SMOS with visible and near/shortwave/thermal infrared satellite data for high resolution soil moisture estimates. J. Hydrol. 2014, 516, 273–283. [Google Scholar] [CrossRef]
- Nadeem, A.A.; Zha, Y.; Shi, L.; Ali, S.; Wang, X.; Zafar, Z.; Afzal, Z.; Tariq, M.A.U.R. Spatial Downscaling and Gap-Filling of SMAP Soil Moisture to High Resolution Using MODIS Surface Variables and Machine Learning Approaches over ShanDian River Basin, China. Remote Sens. 2023, 15, 812. [Google Scholar] [CrossRef]
- Romano, E.; Bergonzoli, S.; Bisaglia, C.; Picchio, R.; Scarfone, A. The Correlation between Proximal and Remote Sensing Methods for Monitoring Soil Water Content in Agricultural Applications. Electronics 2023, 12, 127. [Google Scholar] [CrossRef]
- Fang, B.; Lakshmi, V. Soil moisture at watershed scale: Remote sensing techniques. J. Hydrol. 2014, 516, 258–272. [Google Scholar] [CrossRef]
- Zaitunah, A.; Samsuri; Ahmad, A.G.; A Safitri, R. Normalized difference vegetation index (ndvi) analysis for land cover types using landsat 8 oli in besitang watershed, Indonesia. IOP Conf. Series Earth Environ. Sci. 2018, 126, 012112. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide Dynamic Range Vegetation Index for Remote Quantification of Biophysical Characteristics of Vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [PubMed]
- Singh, K.V.; Setia, R.; Sahoo, S.; Prasad, A.; Pateriya, B. Evaluation of NDWI and MNDWI for assessment of waterlogging by integrating digital elevation model and groundwater level. Geocarto Int. 2015, 30, 650–661. [Google Scholar] [CrossRef]
- Nicholson, S.; Farrar, T. The influence of soil type on the relationships between NDVI, rainfall, and soil moisture in semiarid Botswana. I. NDVI response to rainfall. Remote Sens. Environ. 1994, 50, 107–120. [Google Scholar] [CrossRef]
- Han, Y.; Wang, Y.; Zhao, Y. Estimating Soil Moisture Conditions of the Greater Changbai Mountains by Land Surface Temperature and NDVI. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2509–2515. [Google Scholar] [CrossRef]
- Chen, T.; de Jeu, R.; Liu, Y.; van der Werf, G.; Dolman, A. Using satellite based soil moisture to quantify the water driven variability in NDVI: A case study over mainland Australia. Remote Sens. Environ. 2014, 140, 330–338. [Google Scholar] [CrossRef]
- Pasolli, L.; Notarnicola, C.; Bertoldi, G.; Bruzzone, L.; Remelgado, R.; Greifeneder, F.; Niedrist, G.; Della Chiesa, S.; Tappeiner, U.; Zebisch, M. Estimation of Soil Moisture in Mountain Areas Using SVR Technique Applied to Multiscale Active Radar Images at C-Band. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 262–283. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Sensor | Bands | Wavelength | Spatial Resolution (m) |
|---|---|---|---|---|
| L8 | Operational Land Imager (OLI) | Band1-Coastal aerosol | 0.43–0.45 µm | 30 |
| Band2-Blue | 0.45–0.51 µm | 30 | ||
| Band3-Green | 0.53–0.59 µm | 30 | ||
| Band4-Red | 0.64–0.67 µm | 30 | ||
| Band5-NIR | 0.85–0.88 µm | 30 | ||
| Band6-SWIR 1 | 1.57–1.65 µm | 30 | ||
| Band7-SWIR 2 | 2.11–2.29 µm | 30 | ||
| Band8-Panchromatic | 0.5–0.68 µm | 15 | ||
| Band9-Cirrus | 1.36–1.38 µm | 30 | ||
| Band10-TIRS1 | 10.60–11.19 µm | 100 | ||
| Band11-TIRS2 | 11.50–12.51 µm | 100 | ||
| S2 | Multispectral Imager (MSI) | Band1-Coastal aerosol | 443 nm | 60 |
| Band2-Blue | 490 nm | 10 | ||
| Band3-Green | 560 nm | 10 | ||
| Band4-Red | 665 nm | 10 | ||
| Band5-VNIR | 705 nm | 20 | ||
| Band6-VNIR | 740 nm | 20 | ||
| Band7-VNIR | 783 nm | 20 | ||
| Band8-VNIR | 842 nm | 20 | ||
| Band8Aa-VNIR | 865 nm | 10 | ||
| Band9-SWIR | 940 nm | 20 | ||
| Band10-SWIR | 1375 nm | 60 | ||
| Band11-SWIR | 1610 nm | 20 | ||
| Band12-SWIR | 2190 nm | 20 |
| Indices | Formula | References |
|---|---|---|
| Salinity index—S1 | SI1 = sqrt ( + ) | [31] |
| Salinity index—S2 | SI2 = sqrt (Green × Red) | [32] |
| Salinity index—S3 | SI3 = (Blue × Red) | [33] |
| Salinity index—S4 | SI4 = (Red × NIR)/Green | [34] |
| Salinity index—S5 | SI5 = Blue/Red | [34] |
| NDSI | NDSI = (Red − NIR)/(Red + NIR) | [33] |
| NDVI | NDVI = (NIR − Red)/(Red + NIR) | [35] |
| SAVI (L = 0.5) | SAVI = (1 + L) × (NIR − Red)/(L + NIR + Red) | [36] |
| Vegetation soil salinity index (VSSI) | VSSI = 2 × Green − 5 × (Red + NIR) | [37] |
| NDWI | NDWI = (SWIR − NIR)/(SWIR + NIR) | [38] |
| Extended EVI | 2.5 × (NIR + SWIR1-Red)/[NIR + 2.5 × (SWIR1 + 6 × NIR + Red 7.5 × SWIR1 − Red) × Blue + 1 | [39] |
| MNDWI | MNDWI = (−SWIR)/(Green + SWIR) | [40] |
| Parameters | Range | Optimum Value |
|---|---|---|
| n_estimators | 70 to 150 | 100 |
| Max feature | (Auto, SQRT, Log2) | log2 |
| Max depth | 1 to 10 | 3 |
| min_samples_spli | (2, 4, 8) | 2 |
| bootstrap | (True, False) | False |
| Parameters | Range | Optimum Value |
|---|---|---|
| C | (1, 5, 10, 15, 20, 25, 35, 40) | 15 |
| Gamma | (scale, auto) | scaler |
| Kernel | (linear, poly, rbf, sigmoid) | rbf |
| Parameters | Range | Optimum Value |
|---|---|---|
| n_estimators | 70 to 500 | 200 |
| Max depth | 1 to 10 | 8 |
| gamma | 0.1–1 | 0.1 |
| min_child_weight | 3 to 10 | 5 |
| Parameters | Range | Optimum Value |
|---|---|---|
| n_estimators | 150 | 300 |
| Max feature | (Auto, Sqrt, Log2) | auto |
| Max depth | 1 to 10 | 5 |
| min_samples_split | (2, 4, 8) | 2 |
| bootstrap | (True, False) | False |
| Argument | Type | Details |
|---|---|---|
| Image | Image | The input image for clustering. |
| Size | Integer, default: 3 | The distance between superpixel seeds, measured in pixels. No grid is created if a ‘seeds’ image is provided. |
| Compactness | Float, default: 5 | Compactness factor. Clusters get increasingly compact as values increase (square). Spatial distance weighting is disabled when this is set to 0. |
| Connectivity | Integer, default: 8 | Connectivity. Either 4 or 8. |
| Neighborhood size | Integer, default: 25 | Size of the tile neighborhood (to avoid tile boundary artifacts). Defaults to 2× size. |
| Seeds | Image, default: null | Any nonzero-valued pixels are used as seed locations if they are present. As determined by “connectivity,” pixels that touch are regarded as belonging to the same cluster. |
| Machine Learning Methods | Landsat 8 | ||||||
|---|---|---|---|---|---|---|---|
| Dataset | R2 | RMSE | MEA | AIC | BIC | NSH | |
| Calibration | 0.88 | 1.58 | 0.85 | 136 | 154 | 0.88 | |
| RF | Validation | 0.67 | 6.64 | 1.28 | 233 | 247 | 0.67 |
| XGBoost | calibration | 0.78 | 3.13 | 1.25 | 323 | 341 | 0.78 |
| Validation | 0.64 | 7.38 | 1.61 | 255 | 283 | 0.64 | |
| ETD | calibration | 0.75 | 5.17 | 1.22 | 478 | 506 | 0.63 |
| Validation | 0.63 | 5.57 | 1.41 | 222 | 252 | 0.75 | |
| SVR | calibration | 0.59 | 5.82 | 1.16 | 494 | 516 | 0.59 |
| Validation | 0.74 | 5.35 | 1.42 | 209 | 226 | 0.74 | |
| Sentinel 2 | |||||||
| RF | calibration | 0.86 | 1.90 | 0.86 | 186 | 204 | 0.86 |
| Validation | 0.76 | 4.76 | 1.14 | 194 | 208 | 0.76 | |
| XGBoost | Calibration | 0.93 | 0.89 | 0.73 | −3 | 43 | 0.93 |
| Validation | 0.79 | 4.24 | 1.08 | 196 | 232 | 0.80 | |
| ETD | calibration | 0.90 | 1.40 | 0.68 | 120 | 166 | 0.90 |
| Validation | 0.84 | 3.24 | 1.11 | 164 | 200 | 0.84 | |
| SVR | calibration | 0.64 | 5.11 | 1.12 | 457 | 475 | 0.64 |
| Validation | 0.83 | 3.40 | 1.19 | 154 | 168 | 0.83 | |
| Machine Learning Methods | Regression | Landsat8 | |||||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | MEA | AIC | BIC | NSH | ||
| RF | Calibration | 0.91 | 1.27 | 0.80 | 82.18 | 111.09 | 0.91 |
| Validation | 0.87 | 2.66 | 1.11 | 131.67 | 153.84 | 0.87 | |
| XGBoost | calibration | 0.90 | 1.41 | 0.77 | 105.15 | 123.21 | 0.90 |
| Validation | 0.74 | 5.36 | 1.13 | 208.32 | 222.17 | 0.74 | |
| ETD | Calibration | 0.97 | 0.42 | 0.50 | −224.23 | −206.16 | 0.97 |
| Validation | 0.88 | 2.42 | 1.08 | 114.52 | 128.37 | 0.88 | |
| SVR | Calibration | 0.68 | 4.53 | 1.06 | 435 | 475 | 0.68 |
| Validation | 0.78 | 4.39 | 1.37 | 196 | 227 | 0.78 | |
| Regression | Sentinel 2 | ||||||
| RF | Calibration | 0.91 | 1.28 | 0.78 | 87 | 120 | 0.91 |
| Validation | 0.79 | 4.30 | 1.19 | 190 | 215 | 0.79 | |
| XGBoost | Calibration | 0.92 | 1.01 | 0.71 | 21 | 50 | 0.71 |
| Validation | 0.59 | 8.55 | 1.43 | 294 | 316 | 0.59 | |
| ETD | Calibration | 0.97 | 0.34 | 0.45 | −245 | −274 | 0.97 |
| Validation | 0.84 | 3.24 | 1.11 | 171 | 194 | 0.84 | |
| SVR | Calibration | 0.83 | 2.41 | 0.69 | 261 | 297 | 0.83 |
| Validation | 0.78 | 4.60 | 1.32 | 200 | 227 | 0.77 | |
| Machine Learning Methods | Regression | Landsat 8 | ||
|---|---|---|---|---|
| RMSE | MEA | |||
| RF | Calibration | 0.79 ± 0.09 | 1.67 ± 0.24 | 2.84 ± 0.79 |
| Validation | 0.64 ± 0.24 | 1.87 ± 1.13 | 2.27 ± 1.28 | |
| XGBoost | calibration | 0.69 ± 0.45 | 1.98 ± 0.20 | 3.24 ± 0.1 |
| Validation | 0.58 ± 22 | 2.91 ± 1.16 | 2.41 ± 3.04 | |
| ETD | Calibration | 0.77 ± 0.49 | 1.98 ± 1.26 | 0.50 ± 1.54 |
| Validation | 0.62 ± 0.87 | 2.42 ± 1.12 | 1.08 ± 2.86 | |
| SVR | Calibration | 0.68 ± 1.02 | 2.64 ± 0.69 | 2.63 ± 1.37 |
| Validation | 0.56 ± 1.64 | 3.39 ± 1.39 | 3.16 ± 1.96 | |
| Sentinel 2 | ||||
| RF | Calibration | 0.82 ± 0.10 | 3.18 ± 0.53 | 1.77 ± 0.15 |
| Validation | 0.76 ± 0.89 | 2.26 ± 1.02 | 2.79 ± 1.42 | |
| XGBoost | Calibration | 0.74 ± 0.14 | 3.11 ± 0.55 | 1.75 ± 0.18 |
| Validation | 0.60 ± | 2.65 ± 1.16 | 2.68 ± 1.31 | |
| ETD | Calibration | 0.77 ± | 1.68 ± 0.16 | 2.78 ± 0.58 |
| Validation | 0.60 ± | 2.75 ± 0.91 | 3.06 ± 2.32 | |
| SVR | Calibration | 0.73 ± 1.26 | 3.05 ± 1.62 | 2.86 ± |
| Validation | 0.58 ± 1.34 | 4.26 ± 1.54 | 3.98 ± 1.86 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bandak, S.; Movahedi Naeini, S.A.R.; Komaki, C.B.; Verrelst, J.; Kakooei, M.; Mahmoodi, M.A. Satellite-Based Estimation of Soil Moisture Content in Croplands: A Case Study in Golestan Province, North of Iran. Remote Sens. 2023, 15, 2155. https://doi.org/10.3390/rs15082155
Bandak S, Movahedi Naeini SAR, Komaki CB, Verrelst J, Kakooei M, Mahmoodi MA. Satellite-Based Estimation of Soil Moisture Content in Croplands: A Case Study in Golestan Province, North of Iran. Remote Sensing. 2023; 15(8):2155. https://doi.org/10.3390/rs15082155
Chicago/Turabian StyleBandak, Soraya, Seyed Ali Reza Movahedi Naeini, Chooghi Bairam Komaki, Jochem Verrelst, Mohammad Kakooei, and Mohammad Ali Mahmoodi. 2023. "Satellite-Based Estimation of Soil Moisture Content in Croplands: A Case Study in Golestan Province, North of Iran" Remote Sensing 15, no. 8: 2155. https://doi.org/10.3390/rs15082155