

A Modular Method for GPR Hyperbolic Feature Detection and Quantitative Parameter Inversion of Underground Pipelines

Abstract
:1. Introduction
2. Related Works
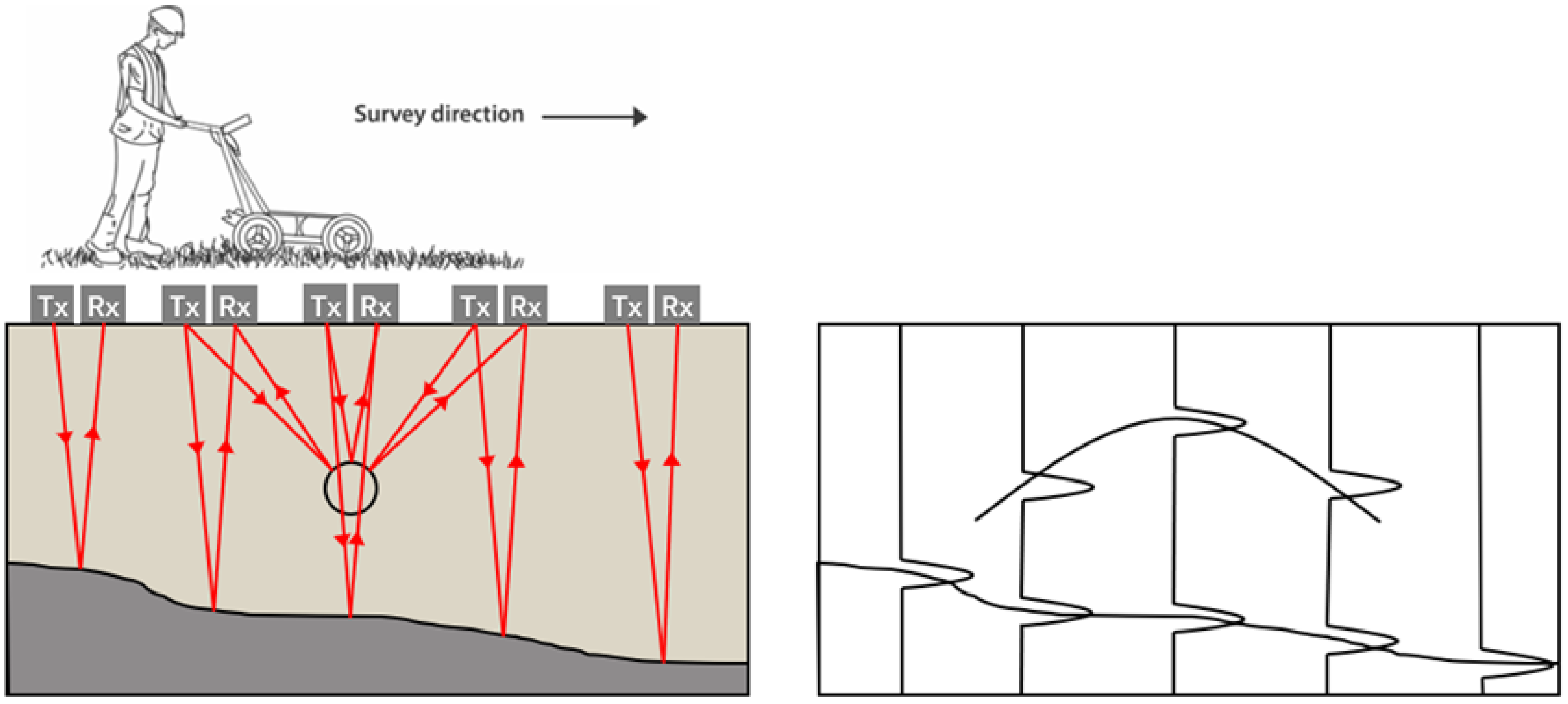
3. Basic Principle of GPR
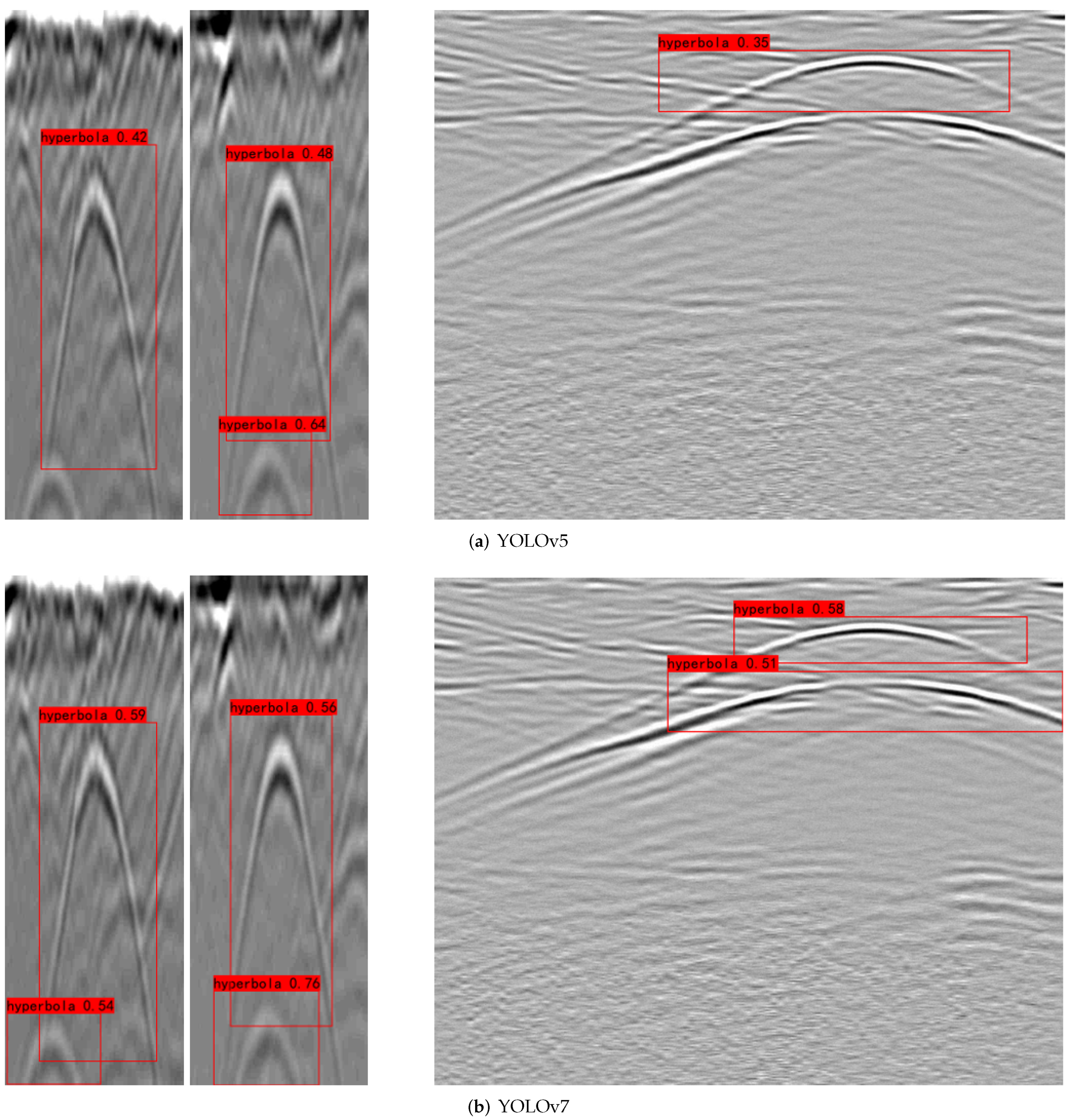
4. Detection of GPR Hyperbolic Features Based on YOLOv7
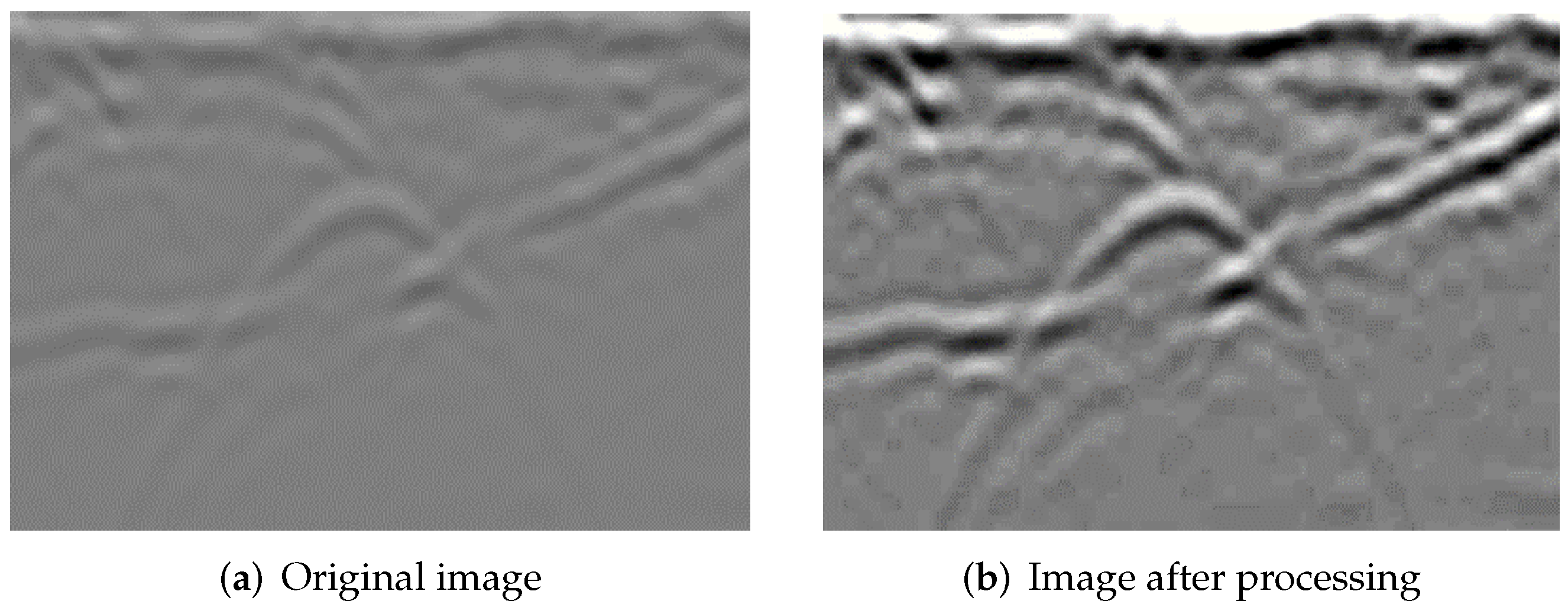
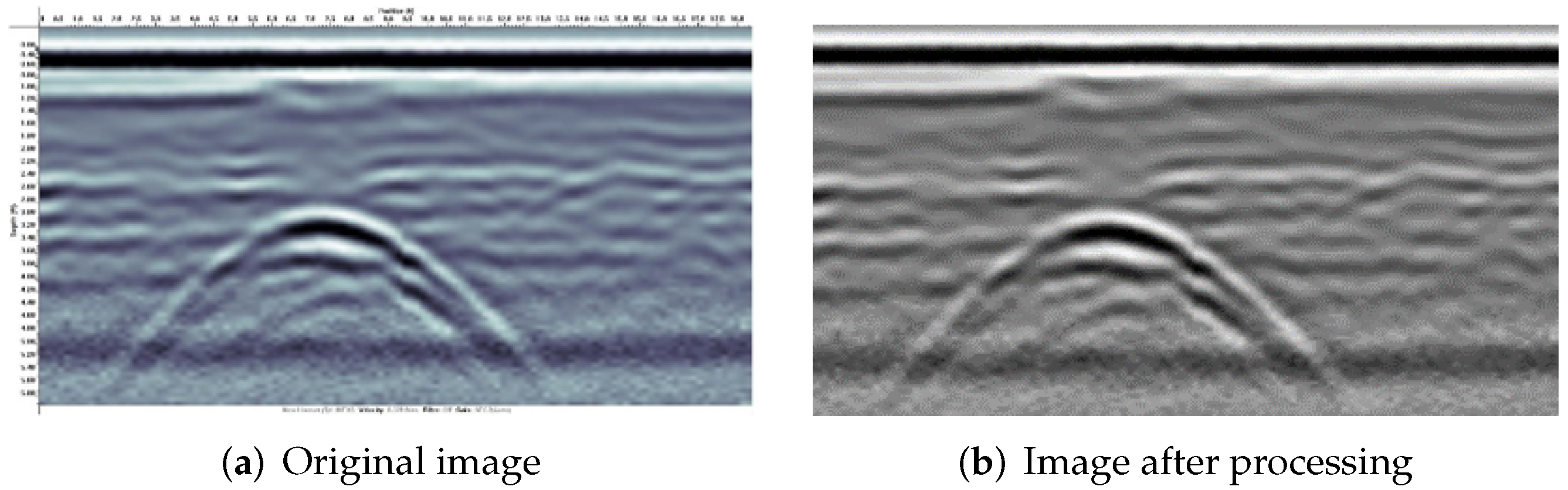
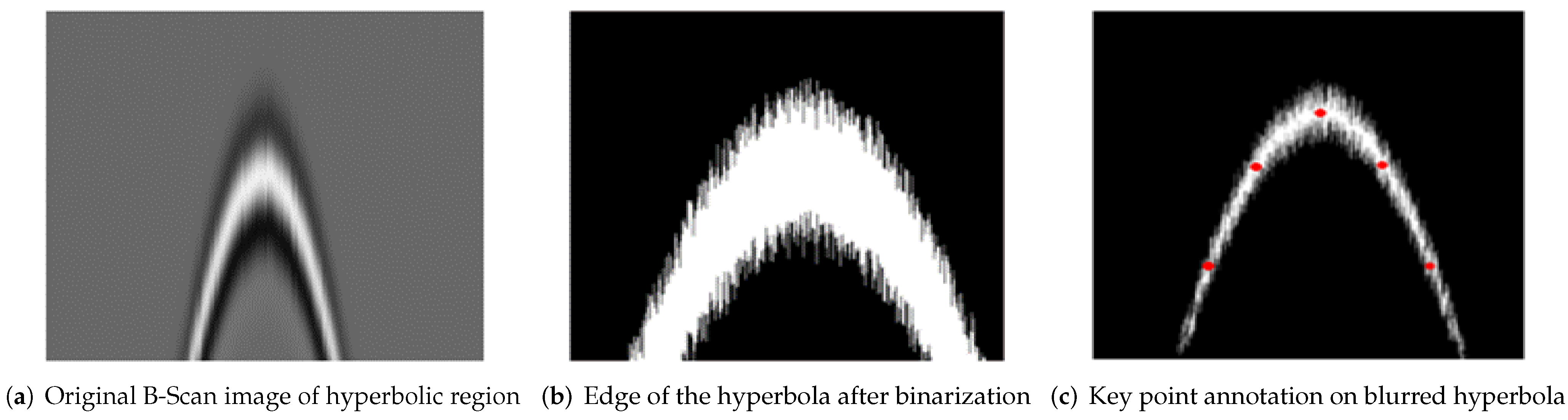
4.1. Data Preparation
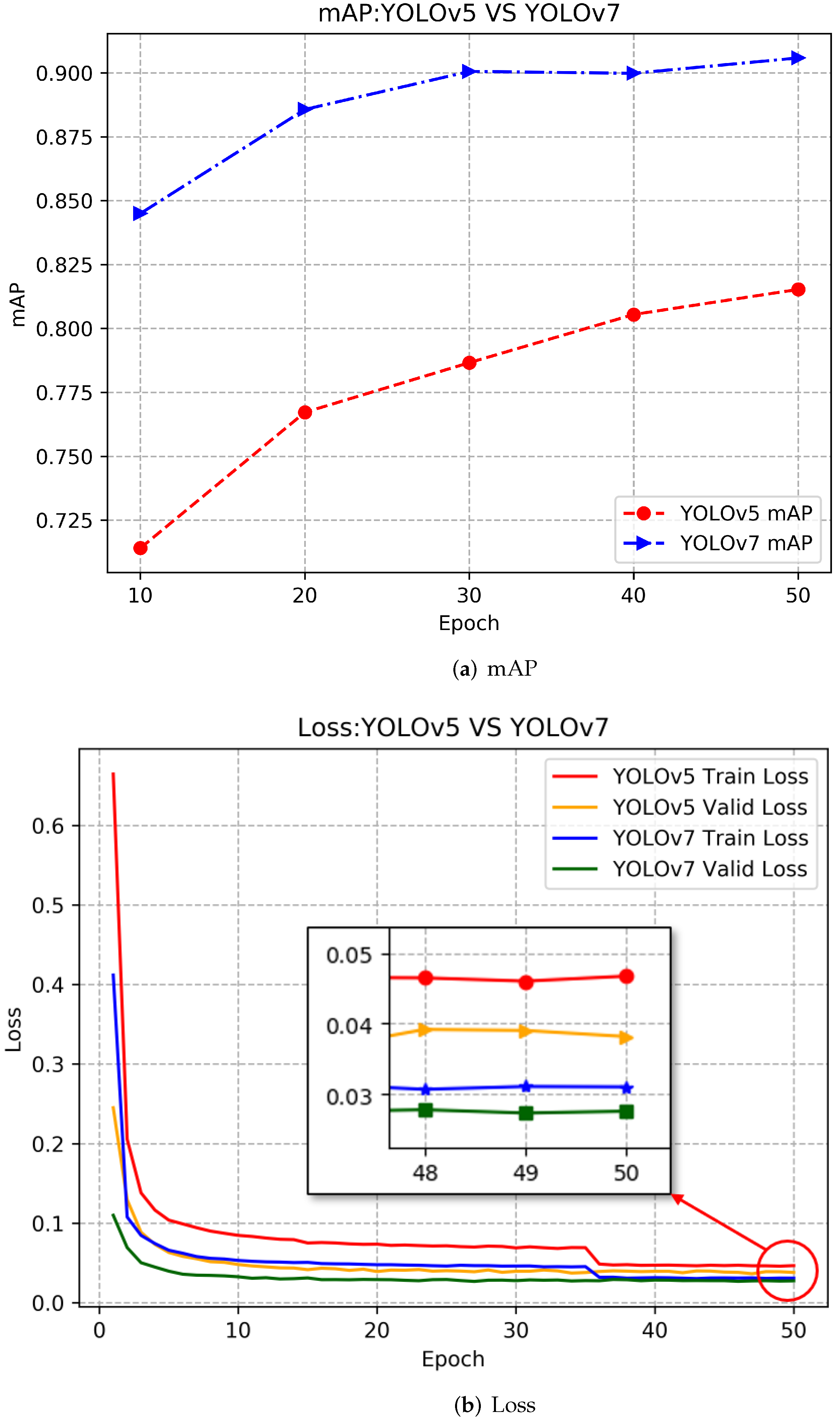
4.2. Comparison of Results
5. Parameter Inversion of Pipeline Based on Key Point Annotation
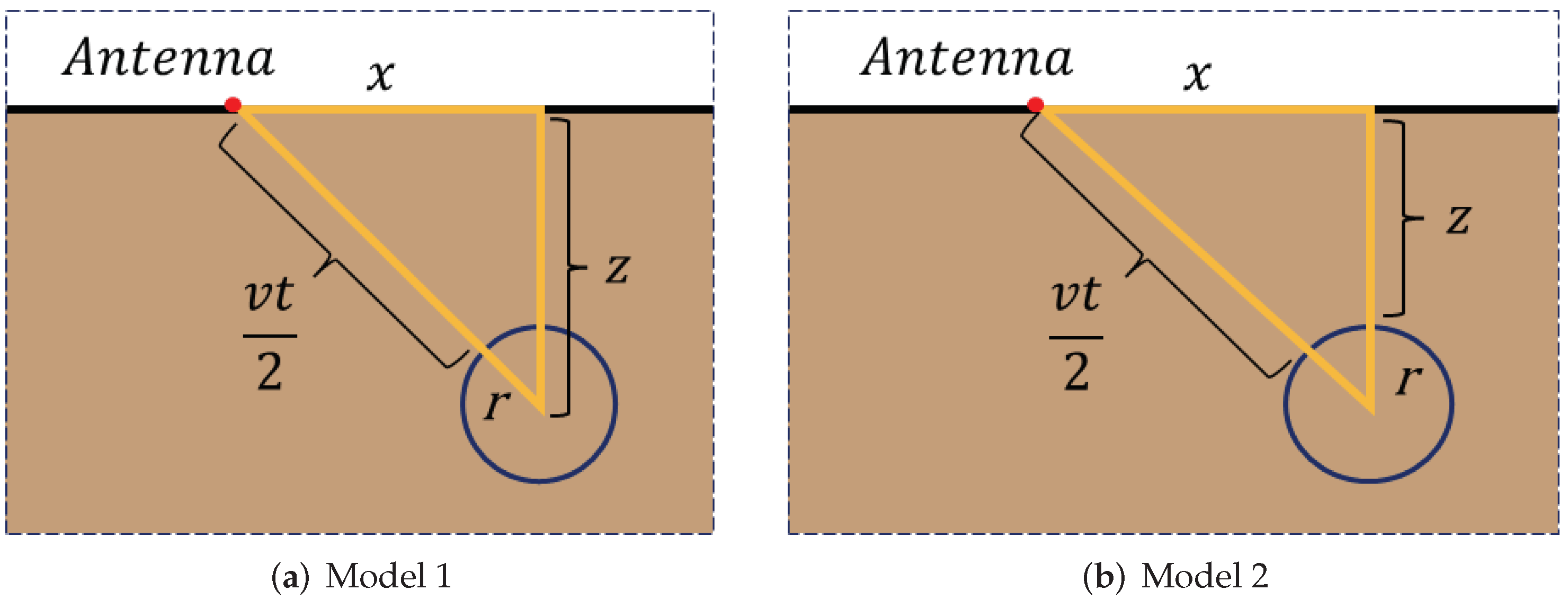
5.1. Physical Model of GPR Detection
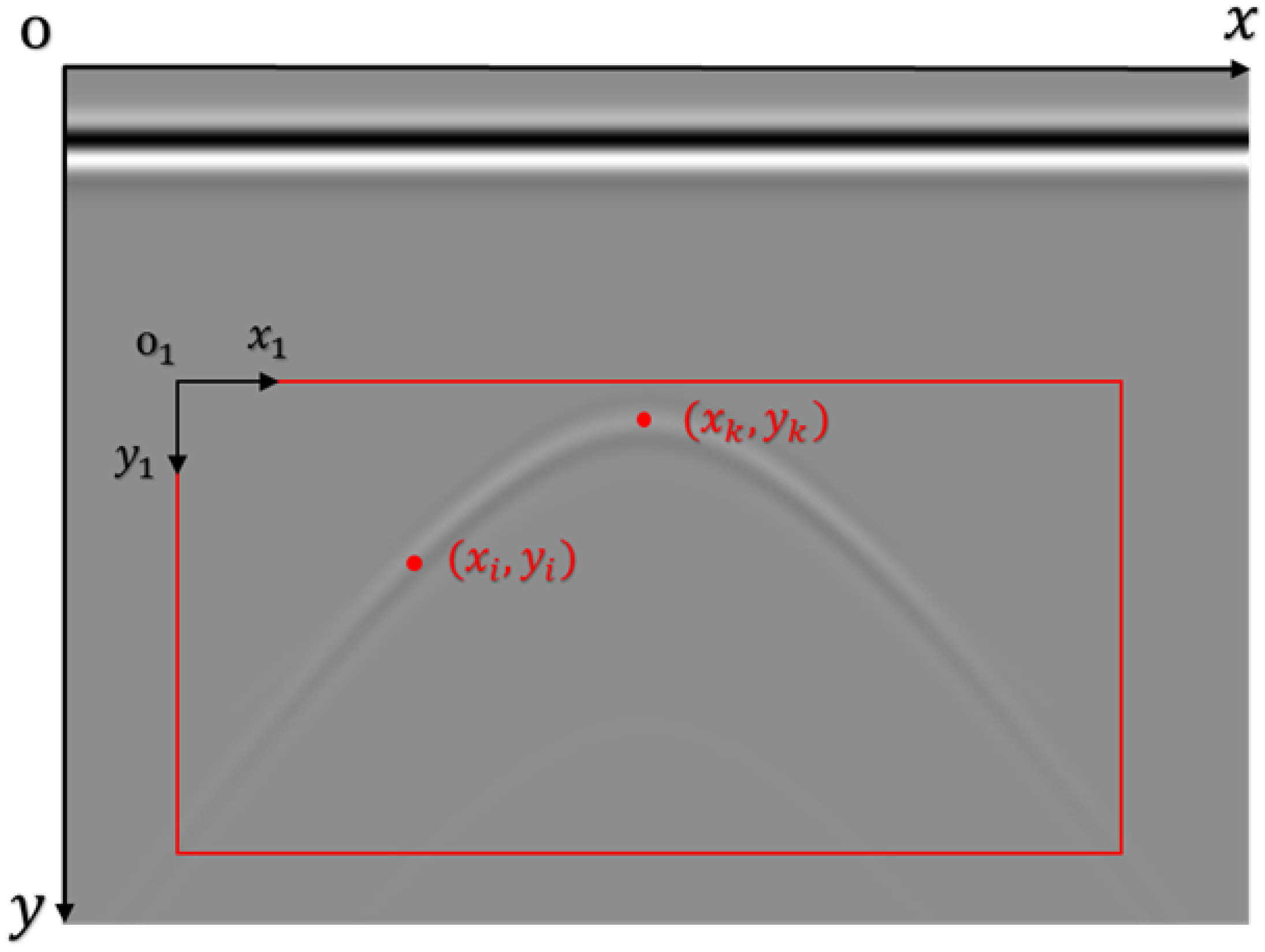
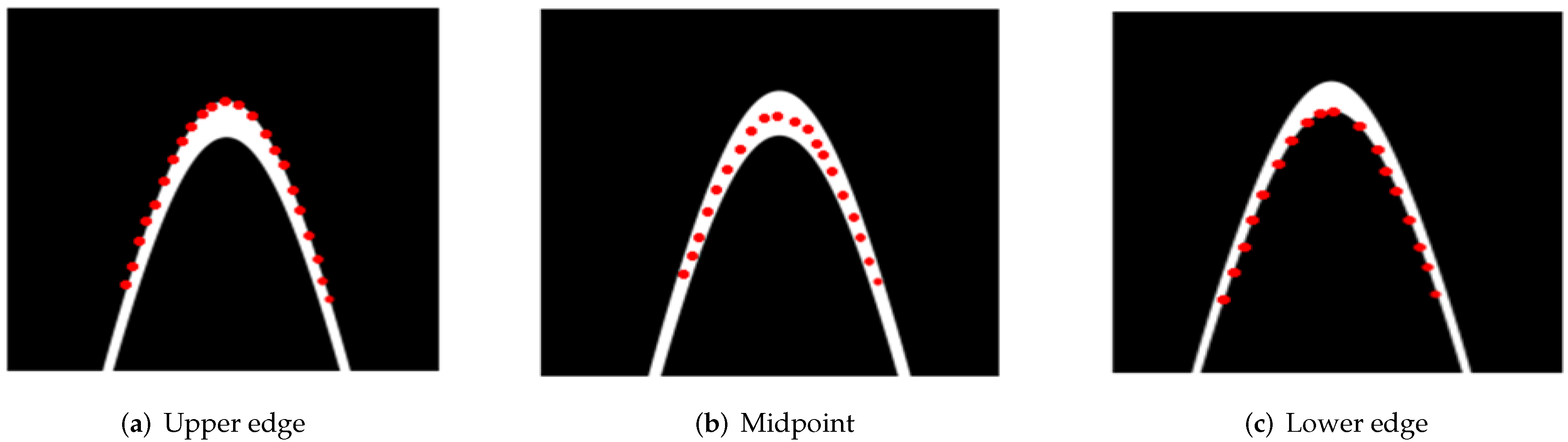
5.2. Coordinate Transformation of Key Points
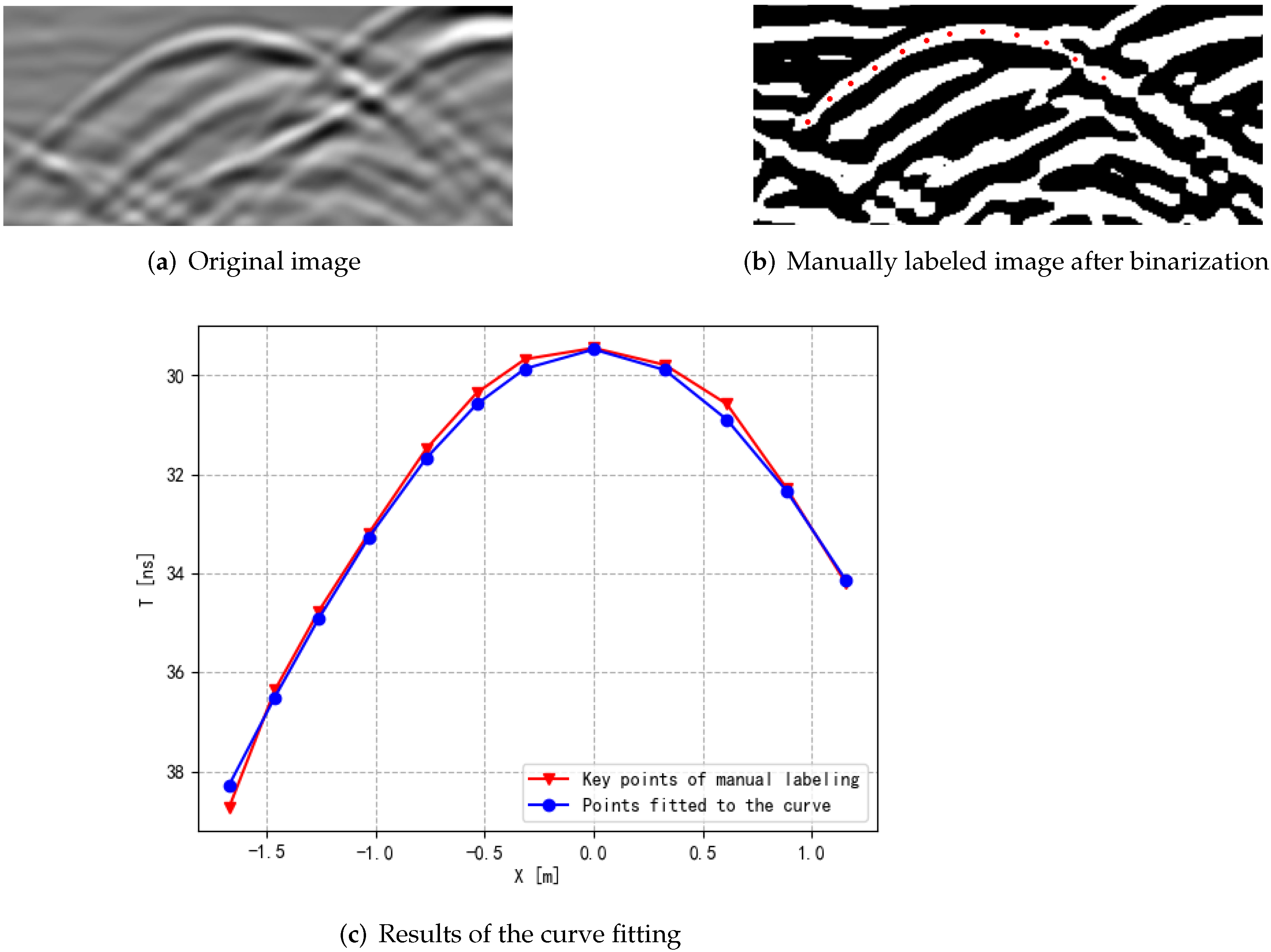
5.3. Two-Stage Curve Fitting and Inversion of the Parameters
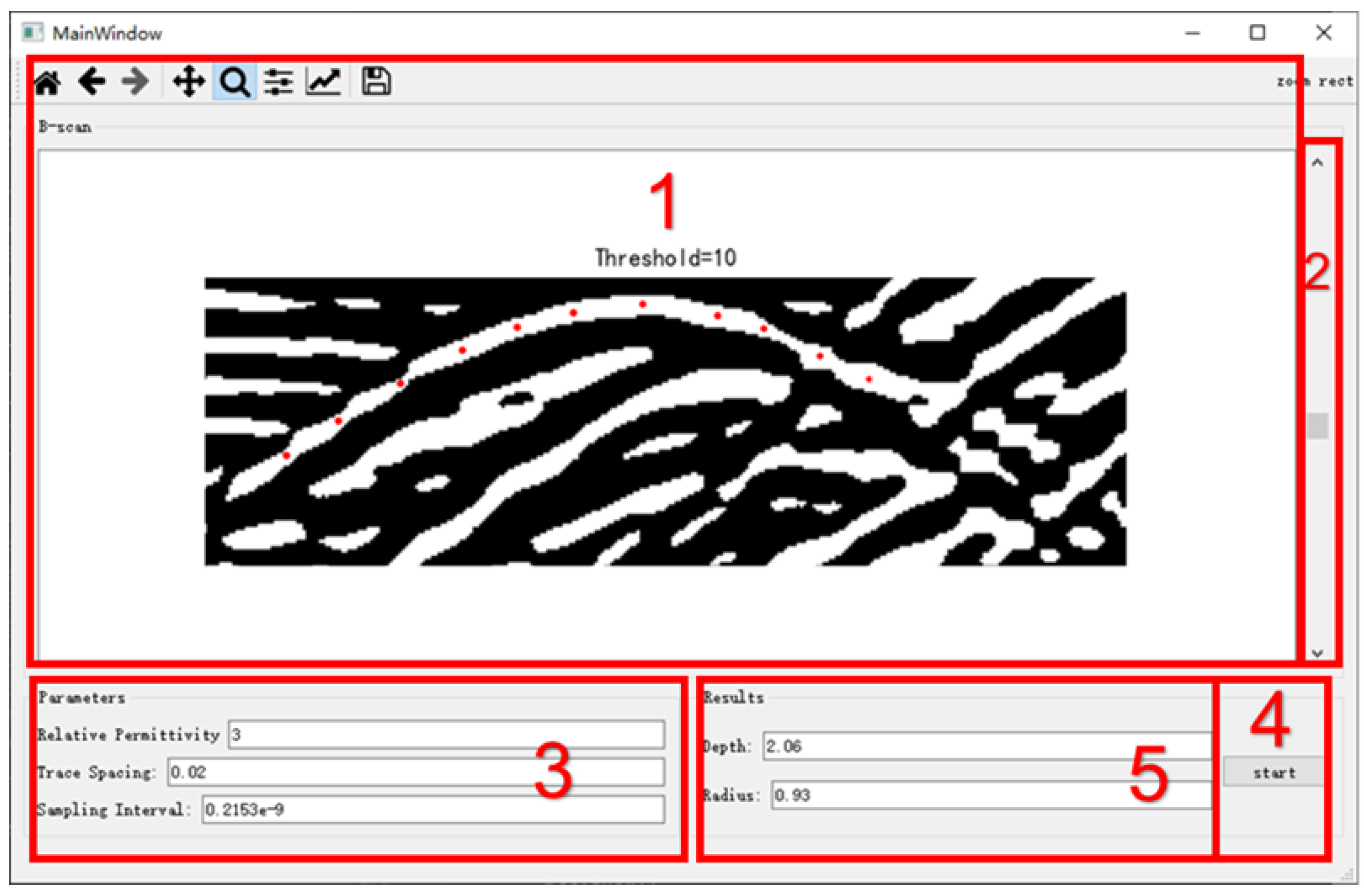
5.4. Introduction of the Graphical User Interface
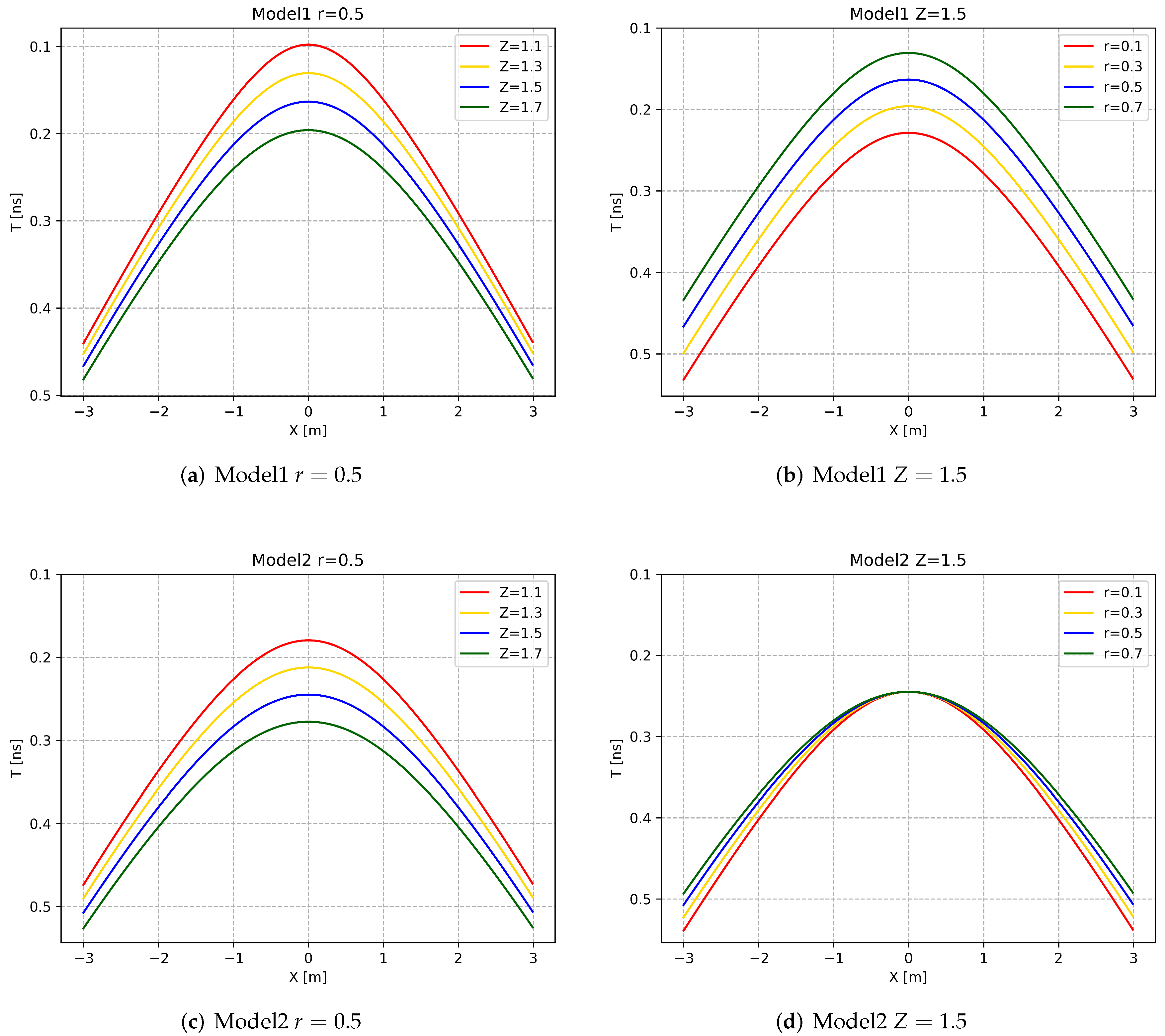
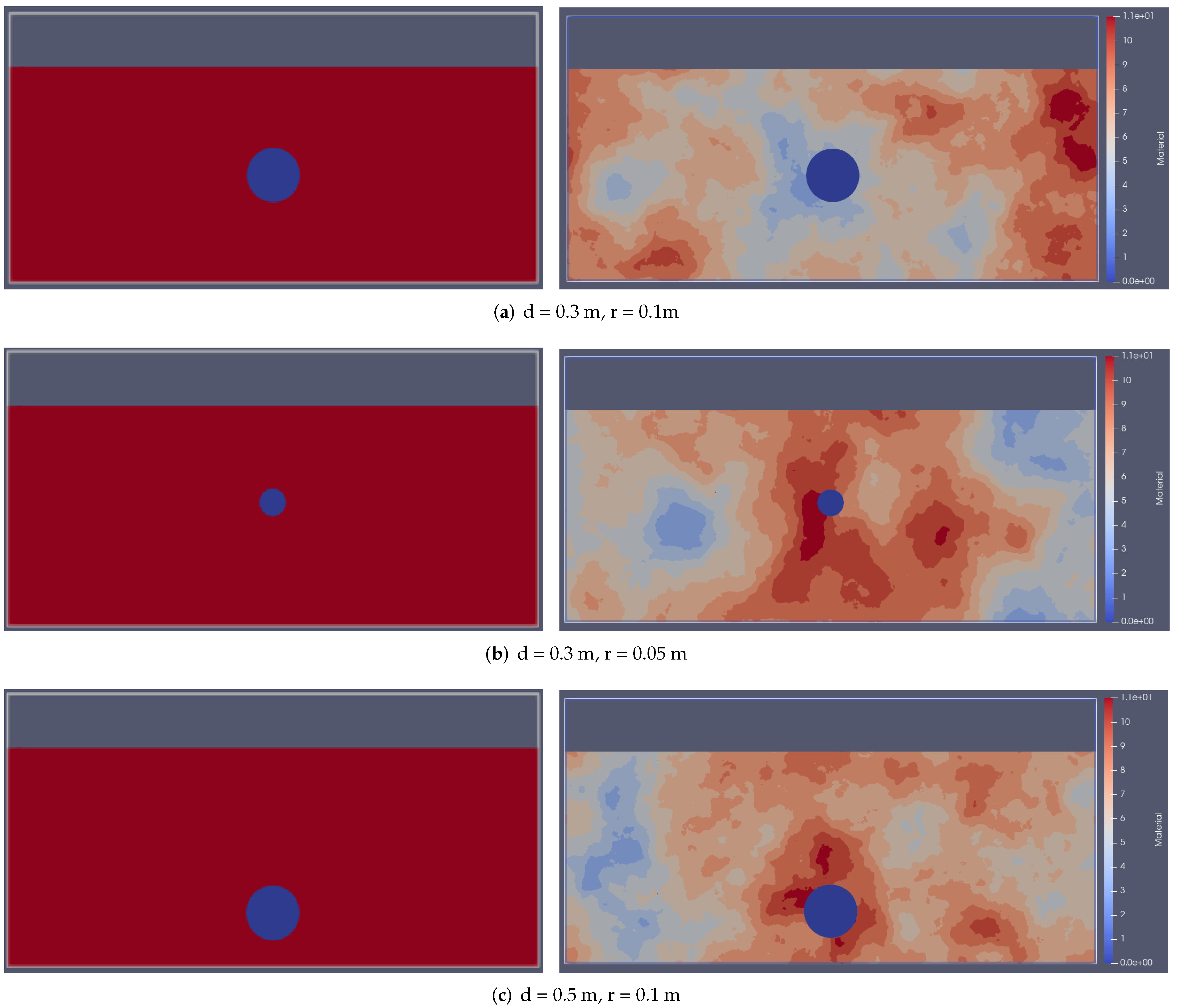
5.5. Performance Analysis with Synthetic Data
- Homogeneous medium model
- •
- Non-homogeneous medium model
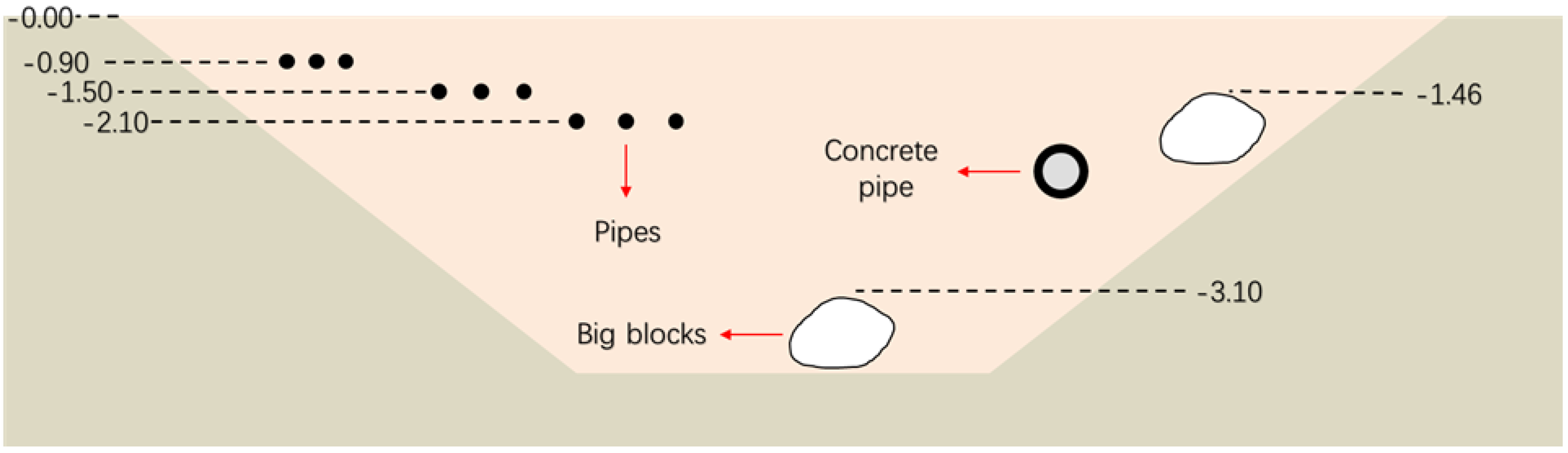
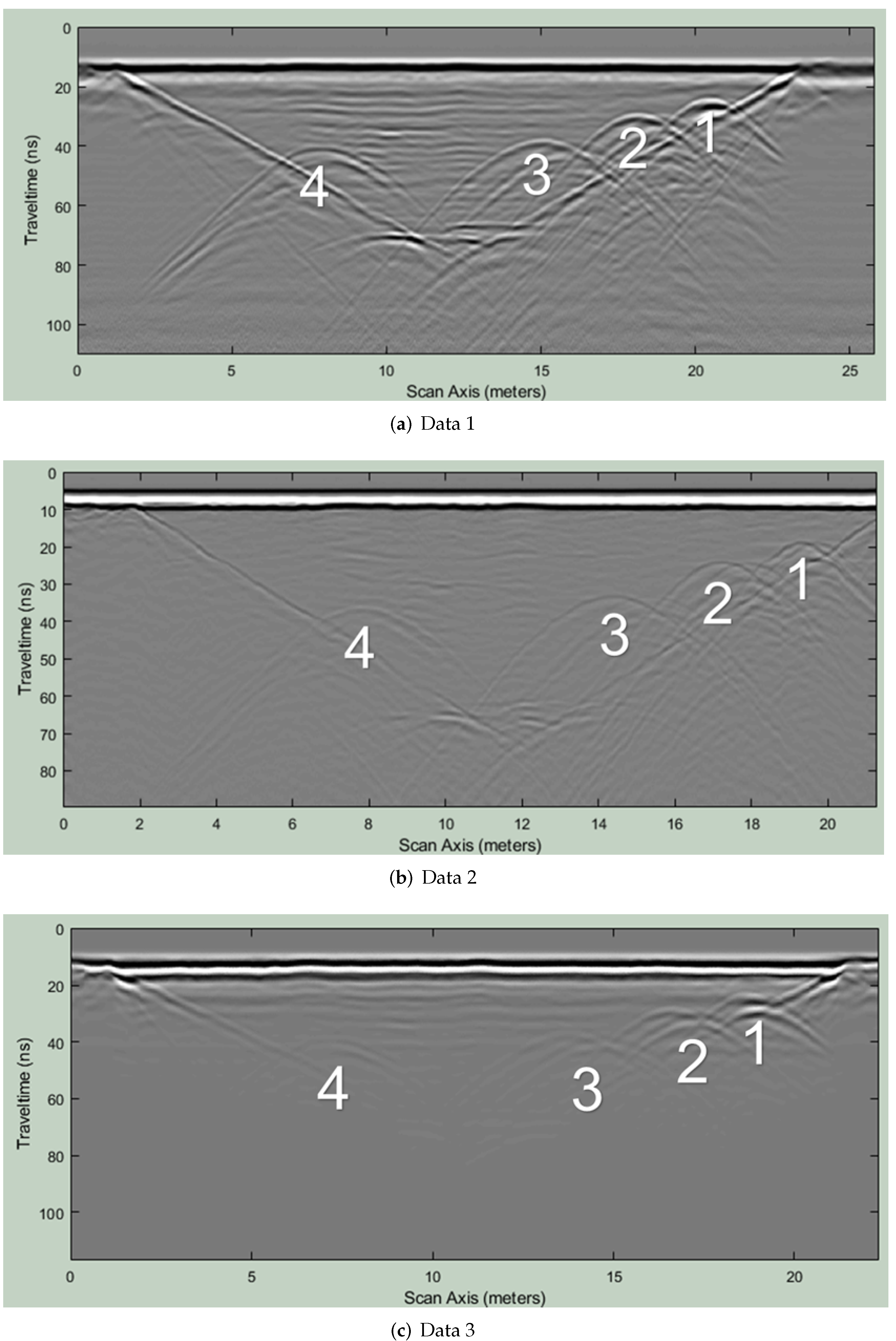
5.6. Performance Analysis with Measured Data
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. .in File of Six Synthetic Data
References
- Travassos, X.L.; Avila, S.L.; Ida, N. Artificial neural networks and machine learning techniques applied to ground penetrating radar: A review. Appl. Comput. Inform. 2021, 17, 296–308. [Google Scholar] [CrossRef]
- Pham, M.T.; Lefèvre, S. Buried object detection from B-scan ground penetrating radar data using Faster-RCNN. In Proceedings of the IGARSS 2018-02018 IEEE International Geoscience and Remote SENSING Symposium, Valencia, Spain, 22–27 July 2018; pp. 6804–6807. [Google Scholar]
- Hou, F.; Lei, W.; Li, S.; Xi, J.; Xu, M.; Luo, J. Improved Mask R-CNN with distance guided intersection over union for GPR signature detection and segmentation. Autom. Constr. 2021, 121, 103414. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, Z.; Luo, Y.; Qiu, Z. Real-time pattern-recognition of GPR images with YOLO v3 implemented by tensorflow. Sensors 2020, 20, 6476. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Zhang, T.; Liu, Z.; Dong, Q. Detection of concealed cracks from ground penetrating radar images based on deep learning algorithm. Constr. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, W.; Gu, X.; Li, S.; Wang, L.; Zhang, T. Application of combining YOLO models and 3D GPR images in road detection and maintenance. Remote Sens. 2021, 13, 1081. [Google Scholar] [CrossRef]
- Xiang, Z.; Rashidi, A.; Ou, G. An improved convolutional neural network system for automatically detecting rebar in GPR data. In Computing in Civil Engineering 2019: Data, Sensing and Analytics; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 422–429. [Google Scholar]
- Dou, Q.; Wei, L.; Magee, D.R.; Cohn, A.G. Real-time hyperbola recognition and fitting in GPR data. IEEE Trans. Geosci. Remote. Sens. 2016, 55, 51–62. [Google Scholar] [CrossRef]
- Zhou, X.; Chen, H.; Li, J. An automatic GPR B-scan image interpreting model. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 3398–3412. [Google Scholar] [CrossRef]
- Lei, W.; Hou, F.; Xi, J.; Tan, Q.; Xu, M.; Jiang, X.; Liu, G.; Gu, Q. Automatic hyperbola detection and fitting in GPR B-scan image. Autom. Constr. 2019, 106, 102839. [Google Scholar] [CrossRef]
- Youn, H.S.; Chen, C.C. Automatic GPR target detection and clutter reduction using neural network. In Proceedings of the Ninth International Conference on Ground Penetrating Radar, Santa Barbara, CA, USA, 29 April–2 May 2002; Volume 4758, pp. 579–582. [Google Scholar]
- Xie, X.; Qin, H.; Yu, C.; Liu, L. An automatic recognition algorithm for GPR images of RC structure voids. J. Appl. Geophys. 2013, 99, 125–134. [Google Scholar] [CrossRef]
- Ristić, A.; Bugarinović, Ž.; Vrtunski, M.; Govedarica, M. Point coordinates extraction from localized hyperbolic reflections in GPR data. J. Appl. Geophys. 2017, 144, 1–17. [Google Scholar] [CrossRef]
- Mertens, L.; Persico, R.; Matera, L.; Lambot, S. Automated detection of reflection hyperbolas in complex GPR images with no a priori knowledge on the medium. IEEE Trans. Geosci. Remote. Sens. 2015, 54, 580–596. [Google Scholar] [CrossRef]
- Feng, D.S.; Yang, Z.L. Automatic recognition of ground penetrating radar image of tunnel lining structure based on deep learning. Prog. Geophys. 2020, 35, 1552–1556. [Google Scholar]
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Yee, K. Numerical solution of initial boundary value problems involving Maxwell’s equations in isotropic media. IEEE Trans. Antennas Propag. 1966, 14, 302–307. [Google Scholar]
- Hu, H.; Ye, H.; Jin, Y.Q. Fast calculation of scattering in planar uniaxial anisotropic multilayers. IEEE Access 2019, 7, 185941–185950. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A.; Giannakis, I. gprMax: Open source software to simulate electromagnetic wave propagation for Ground Penetrating Radar. Comput. Phys. Commun. 2016, 209, 163–170. [Google Scholar] [CrossRef]
- Peplinski, N.R.; Ulaby, F.T.; Dobson, M.C. Dielectric properties of soils in the 0.3–1.3-GHz range. IEEE Trans. Geosci. Remote Sens. 1995, 33, 803–807. [Google Scholar] [CrossRef]
- Dérobert, X.; Pajewski, L. TU1208 open database of radargrams: The dataset of the IFSTTAR geophysical test site. Remote Sens. 2018, 10, 530. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | Labels | Before Correction | After Correction | Relative Error |
|---|---|---|---|---|
| a | Upper edge | 0.3691 | ||
| Middle point | 0.3803 | |||
| Lower edge | 0.3908 | |||
| b | Upper edge | 0.3691 | 0.3 | 0% |
| Middle point | 0.3819 | 0.3016 | 0.50% | |
| Lower edge | 0.39 | 0.2992 | 0.30% | |
| c | Upper edge | 0.5704 | 0.5013 | 2.60% |
| Middle point | 0.5803 | 0.5 | 0% | |
| Lower edge | 0.5892 | 0.4984 | 0.30% |
| Models | Labels | Before Correction | After Correction | Relative Error |
|---|---|---|---|---|
| a | Upper edge | 0.0599 | ||
| Middle point | 0.0458 | |||
| Lower edge | 0.0215 | |||
| b | Upper edge | 0.0057 | 0.0458 | 8.40% |
| Middle point | −0.0031 | 0.0511 | 2.20% | |
| Lower edge | −0.0269 | 0.0516 | 3.20% | |
| c | Upper edge | 0.0682 | 0.1083 | 8.30% |
| Middle point | 0.0502 | 0.1044 | 4.40% | |
| Lower edge | 0.0248 | 0.1033 | 3.30% |
| Models | Before Correction | After Correction | Relative Error |
|---|---|---|---|
| a | 0.4389 | / | |
| b | 0.4389 | 0.3 | 0% |
| c | 0.6869 | 0.548 | 9.60% |
| Models | Before Correction | After Correction | Relative Error |
|---|---|---|---|
| a | −0.0939 | / | |
| b | −0.1354 | 0.0585 | 17% |
| c | −0.0799 | 0.1140 | 14% |
| GPR System | Antenna Frequency | Measuring Line Length | Channel Spacing | Number of A-Scan | Sampling Time Interval | Sampling Points | |
|---|---|---|---|---|---|---|---|
| Data1 | GSSI | 200 MHz | 25.8 m | 0.02 m | 1291 | 0.2153 ns | 512 |
| Data2 | GSSI | 400 MHz | 21.27 m | 0.03333 m | 639 | 0.1761 ns | 510 |
| Data3 | MALA | 250 MHz | 22.32 m | 0.03033 m | 737 | 0.2821 ns | 415 |
| No. 1 Hyperbola | No. 2 Hyperbola | No. 3 Hyperbola | No. 4 Hyperbola | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Before | After | Before | After | Relative Error | Before | After | Relative Error | Before | After | |
| Data1 | 2.11 | / | 2.54 | 1.33 | 11.30% | 3.28 | 2.07 | 1.40% | 3.54 | 2.34 |
| Data2 | 1.64 | 2.08 | 1.34 | 10.70% | 2.87 | 2.13 | 1.40% | 3.11 | 2.37 | |
| Data3 | 1.95 | 2.43 | 1.38 | 8.00% | 3.16 | 2.11 | 0.50% | 3.41 | 2.36 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, C.; Ye, H. A Modular Method for GPR Hyperbolic Feature Detection and Quantitative Parameter Inversion of Underground Pipelines. Remote Sens. 2023, 15, 2114. https://doi.org/10.3390/rs15082114
Zhu C, Ye H. A Modular Method for GPR Hyperbolic Feature Detection and Quantitative Parameter Inversion of Underground Pipelines. Remote Sensing. 2023; 15(8):2114. https://doi.org/10.3390/rs15082114
Chicago/Turabian StyleZhu, Chengke, and Hongxia Ye. 2023. "A Modular Method for GPR Hyperbolic Feature Detection and Quantitative Parameter Inversion of Underground Pipelines" Remote Sensing 15, no. 8: 2114. https://doi.org/10.3390/rs15082114