

Super-Resolution Technique of Multi-Radar Fusion 2D Imaging Based on ExCoV Algorithm in Low SNR
Abstract
:
1. Introduction
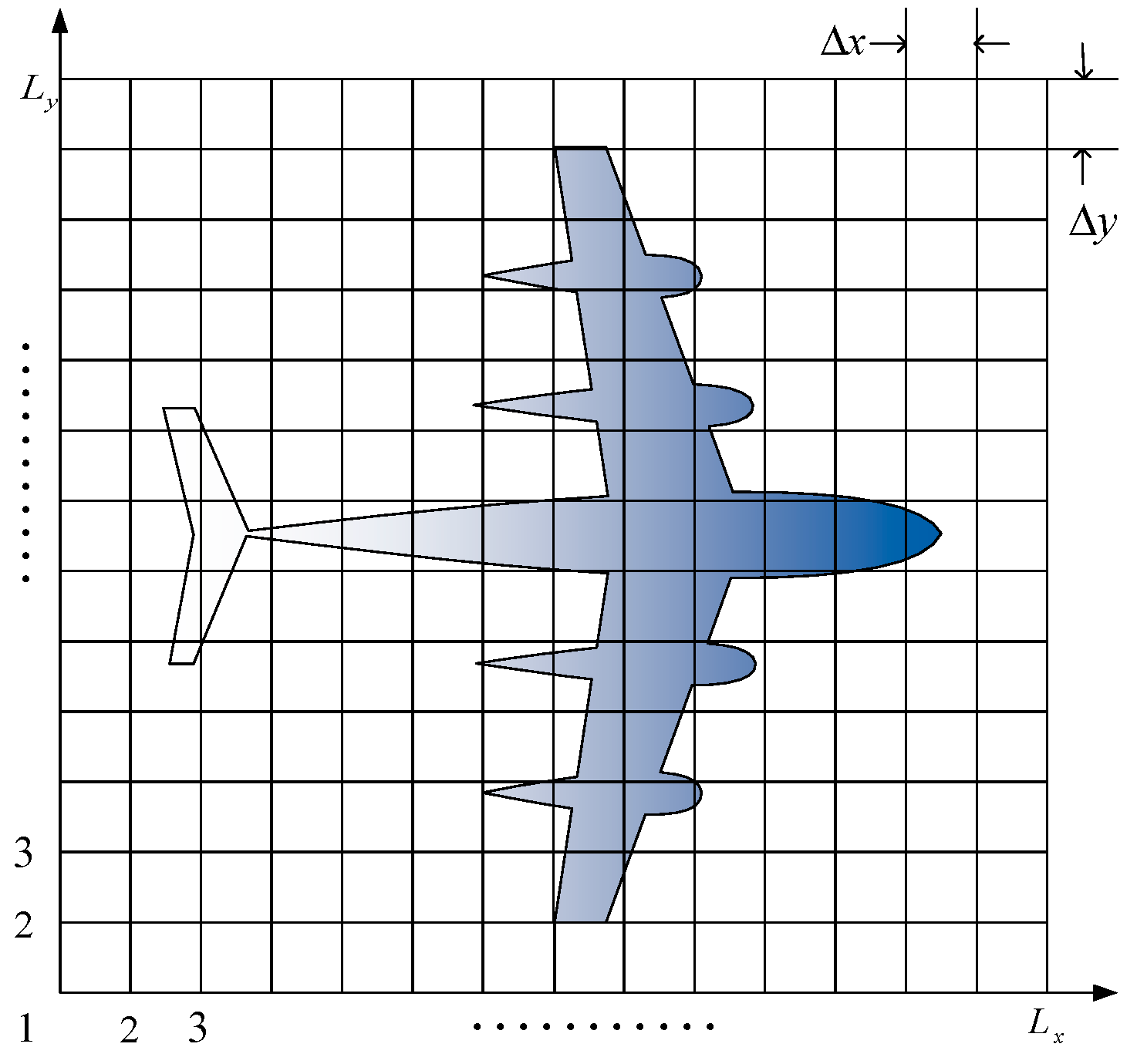
2. GTD Model and 2D RADAR Sparse Representation
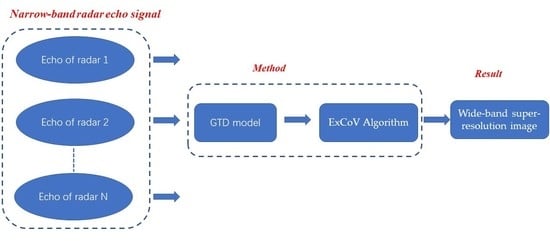
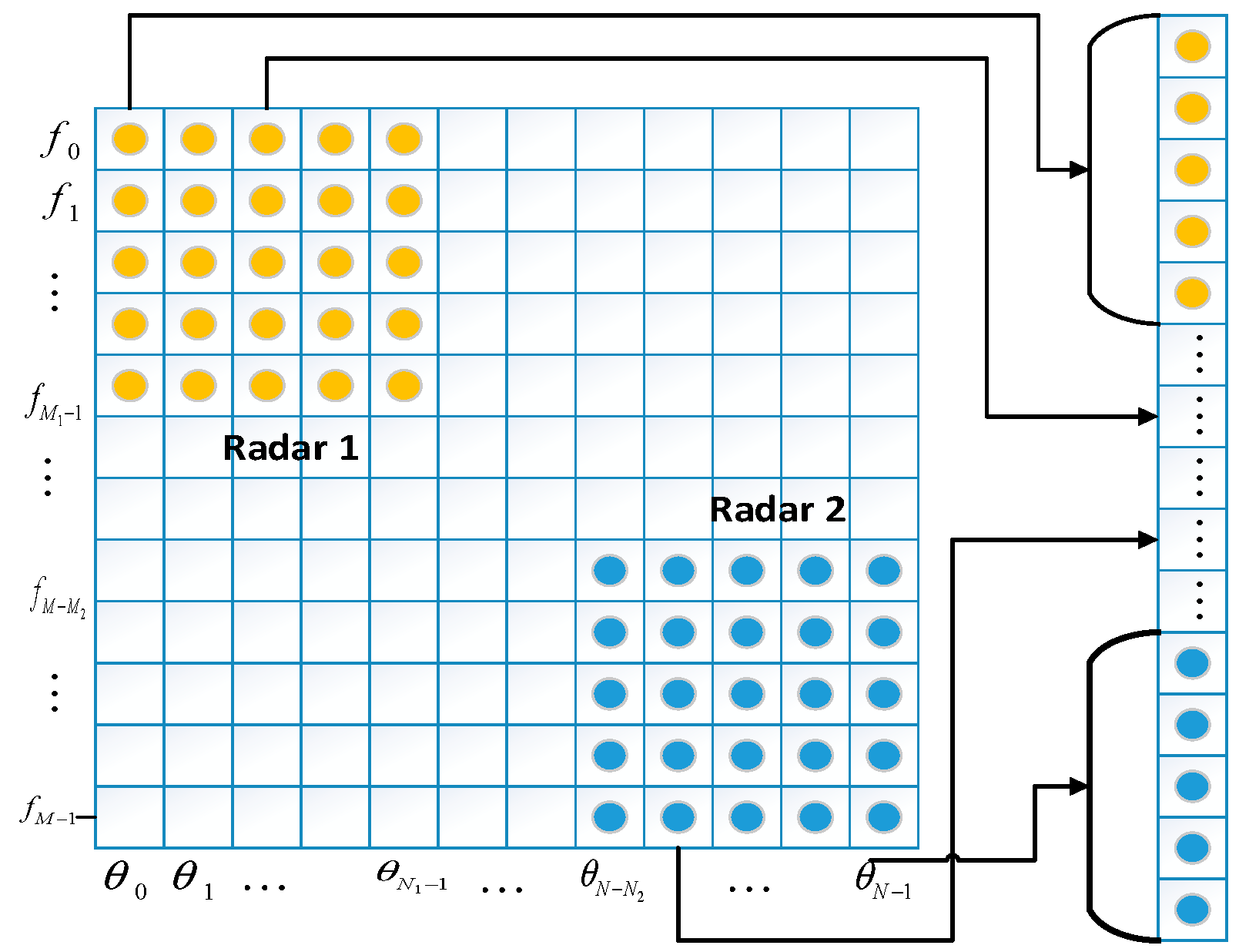
3. Review of the Multi-Radar Fusion 2D Imaging Frame and ExCoV Algorithm Theory
4. Experimental Results
4.1. Example 1: Analytical Result
4.2. Example 2: Simulation Outcomes
4.3. Example 3: Comparison of Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, L.; Wen, W.; Wei, M. Super-resolution SAR image reconstruction via Generative adversarial network. In Proceedings of the 12th International Symposium Antennas, Propagation, and EM Theory (ISAPE), Hangzhou, China, 3–6 December 2018; pp. 441–461. [Google Scholar]
- Ji, B.; Wang, Y.; Zhao, B. Multi-static InISAR imaging for ships under sparse aperture. J. Syst. Eng. Electron. 2022, 33, 575–584. [Google Scholar] [CrossRef]
- Li, W.; Liu, L. Fusion of SAR and optical Image for Sea Ice Extraction. J. Ocean. Univ. China 2021, 20, 1440–1450. [Google Scholar] [CrossRef]
- Özdemir, C. Inverse Synthetic Aperture Radar Imaging with MATLAB Algorithms; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Fan, Y.; He, F.; Zhu, J. Multi-band Radar Signal Fusion based on GTD Model. In Proceedings of the 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 7–10 June 2010; pp. 1–4. [Google Scholar]
- Huan, Z.H.; Chen, R.S. Coherent Processing and Superresolution Technique of Multi-Band Radar Data Based on Fast Sparse Bayesian Learning Algorithm. IEEE Trans. Antennas Propag. 2014, 62, 6217–6227. [Google Scholar]
- Wang, J.; Qin, C. A multi-source image fusion algorithm based on gradient regularized convolution sparse representation. J. Syst. Eng. Electron. 2020, 31, 447–459. [Google Scholar]
- Xu, Y. Analysis of Multi-sensor Image Fusion. In Proceedings of the 5th International Conference on Electrical and Electronics Engineering and Computer Science, Malang, Indonesia, 16–18 October 2018; pp. 312–318. [Google Scholar]
- Su, W.; Wang, H.; Deng, B.; Wang, R. Sparse Bayesian SAR imaging of moving target via the EXCOV method. In Proceedings of the 2014 IEEE Workshop on Statistical Signal Processing (SSP), Gold Coast, Australia, 29 June–2 July 2014; pp. 448–451. [Google Scholar]
- Mu, W.; Li, J.; Liu, Y.; Meng, X.; Yang, D. Research on the Image Fusion Technology based on Redundant Contourlet Transform. In Proceedings of the 2019 3rd Scientific Conference on Mechatronics Engineering and Computer Science, Chongqing, China, 11–12 October 2019. [Google Scholar]
- Yang, D.; Hu, S.; Liu, S.; Ma, X.; Sun, Y. Multi-focus image fusion based on block matching in 3D transform domain. J. Syst. Eng. Electron. 2018, 29, 415–428. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | |
|---|---|
| −1 | corner diffraction |
| −0.5 | edge diffraction |
| 0 | point scatter |
| 0.5 | singly curved surface reflection |
| 1 | flat plate at broadside; dihedral |
| Scattering Center | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| location (x, y) | (0.15, 0.2) | (0.15, −0.2) | (0, 0) | (−0.15, 0.2) | (−0.15, −0.2) |
| amplitude | 1 | 1 | 1 | 1 | 1 |
| scattering type | 0 | 0 | 1 | −0.5 | −1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, D.; Shang, S.; Ding, D. Super-Resolution Technique of Multi-Radar Fusion 2D Imaging Based on ExCoV Algorithm in Low SNR. Remote Sens. 2023, 15, 2108. https://doi.org/10.3390/rs15082108
Song D, Shang S, Ding D. Super-Resolution Technique of Multi-Radar Fusion 2D Imaging Based on ExCoV Algorithm in Low SNR. Remote Sensing. 2023; 15(8):2108. https://doi.org/10.3390/rs15082108
Chicago/Turabian StyleSong, Dawei, She Shang, and Dazhi Ding. 2023. "Super-Resolution Technique of Multi-Radar Fusion 2D Imaging Based on ExCoV Algorithm in Low SNR" Remote Sensing 15, no. 8: 2108. https://doi.org/10.3390/rs15082108