
Millimeter-Wave Radar Monitoring for Elder’s Fall Based on Multi-View Parameter Fusion Estimation and Recognition

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Radar Echo Analysis and Discussion
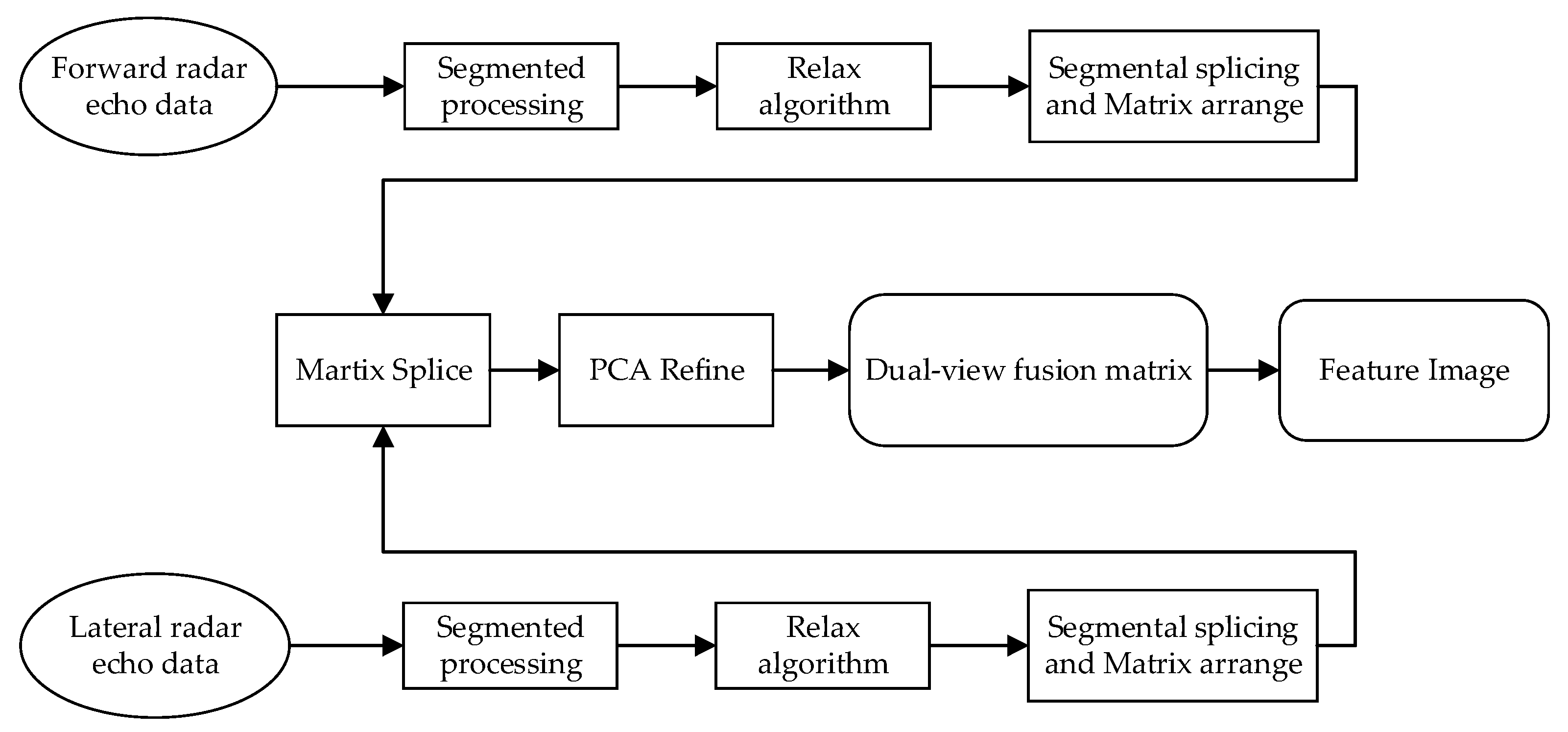
2.2. Feature Image Formulation Based on Relax Algorithm
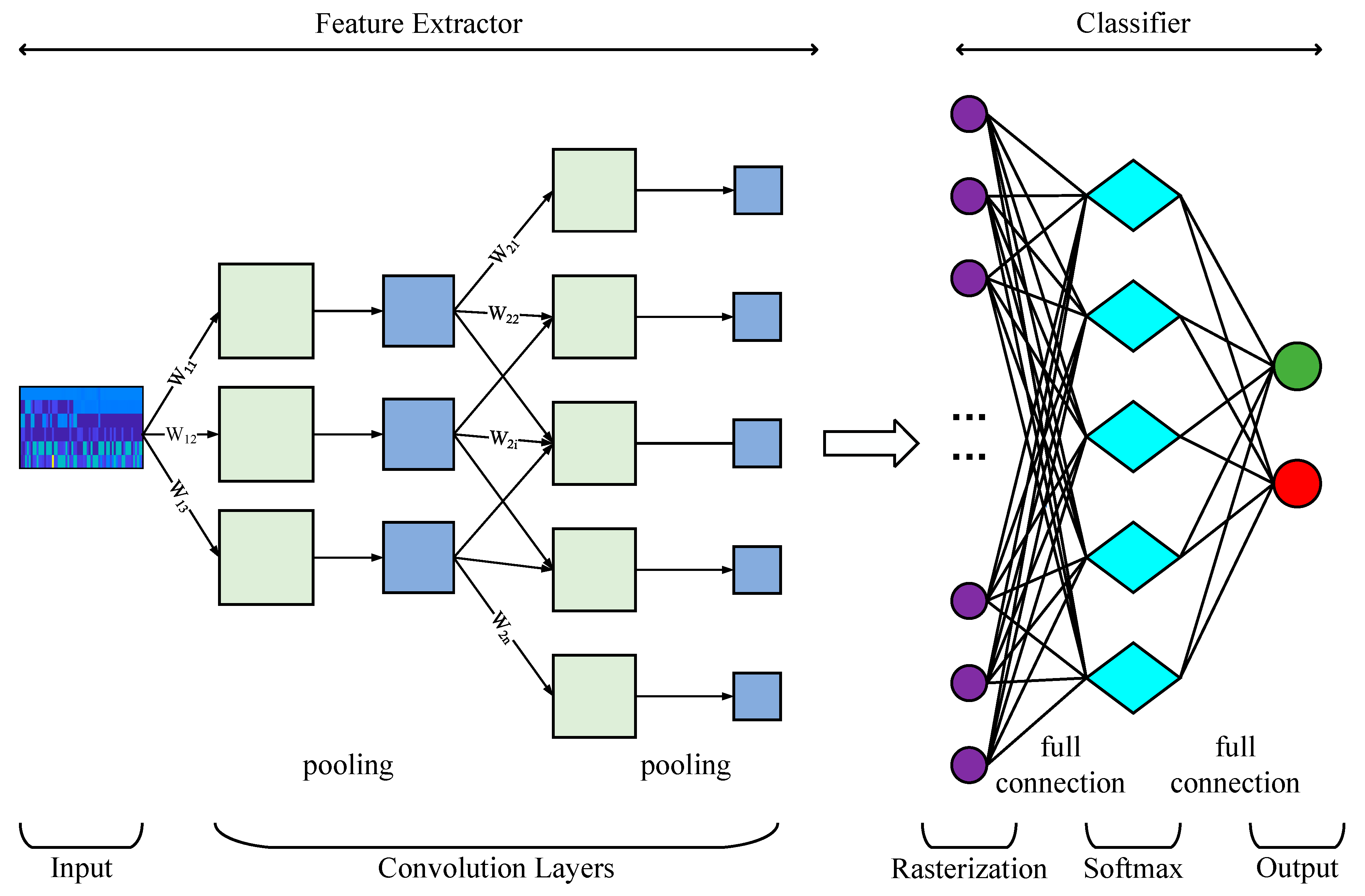
3. Neural Network Structure
4. Experimental Setup and Result Analysis
4.1. Experimental Environment Construction and Scene Setting
4.2. Dataset Production
4.3. Dataset Processing and Feature Image Generation
4.4. Experimental Results and Analysis
- Recall (R):
- Precision (P):
- F1-score (F1):
- Matthews correlation coefficient (Mcc):
- True Positive Rate (TPR):
- False Positive Rate (FPR):
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, X.; He, Y.; Fioranelli, F.; Jing, X. Semisupervised human activity recognition with radar micro-Doppler signatures. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5103112. [Google Scholar] [CrossRef]
- Gutierrez-Madronal, L.; La Blunda, L.; Wagner, M.F.; Medina-Bulo, I. Test event generation for a fall-detection IoT system. IEEE Internet Things J. 2019, 6, 6642–6651. [Google Scholar] [CrossRef]
- Ding, C.; Hong, H.; Zou, Y.; Chu, H.; Li, C. Continuous human motion recognition with a dynamic range-Doppler trajectory method based on FMCW radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6821–6831. [Google Scholar] [CrossRef]
- Amin, M.G.; Zhang, Y.D.; Ahmad, F.; Ho, K.C.D. Radar signal processing for elderly fall detection the future for in-home monitoring. IEEE Signal Process. Mag. 2016, 33, 71–80. [Google Scholar] [CrossRef]
- Abdu, F.J.; Zhang, Y.; Deng, Z. Activity classification based on feature fusion of FMCW radar human motion micro-Doppler signatures. IEEE Sens. J. 2022, 22, 8648–8662. [Google Scholar] [CrossRef]
- Ding, C.; Zhang, L.; Chen, H.; Hong, H.; Zhu, X.; Li, C. Human motion recognition with spatial-temporal-convLSTM network using dynamic range-doppler frames based on portable FMCW radar. IEEE Trans. Microw. Theory Tech. 2022, 70, 5029–5038. [Google Scholar] [CrossRef]
- Kim, Y.; Alnujaim, I.; Oh, D. Human activity classification based on point clouds measured by millimeter wave MIMO radar with deep recurrent neural networks. IEEE Sens. J. 2021, 21, 13522–13529. [Google Scholar] [CrossRef]
- Bai, X.; Hui, Y.; Wang, L.; Zhou, F. Radar-based human gait recognition using dual-channel deep convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9767–9778. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G. Radar data cube analysis for fall detection. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 2446–2450. [Google Scholar]
- Tran, N.; Kilic, O.; Nahar, S.; Ren, L.; Wang, H.; Fathy, A.E. Contactless monitoring and classification of human motion activities by using SFCW radar. In Proceedings of the 2016 IEEE International Symposium on Antennas and Propagation (APSURSI), Fajardo, PR, USA, 25 June–2 July 2016; pp. 883–884. [Google Scholar]
- Gurbuz, S.Z.; Amin, M.G. Radar-based human-motion recognition with deep learning: Promising applications for indoor monitoring. IEEE Signal Process. Mag. 2019, 36, 16–28. [Google Scholar] [CrossRef]
- Kernec, J.L.; Fioranelli, F.; Ding, C.; Zhao, H.; Romain, O. Radar signal processing for sensing in assisted living: The challenges associated with real-time implementation of emerging algorithms. IEEE Signal Process. Mag. 2019, 36, 29–41. [Google Scholar] [CrossRef]
- Chaccour, K.; Darazi, R.; Hajjam, A.; Andres, E. From fall detection to fall prevention: A generic classification of fall-related systems. IEEE Sensors J. 2017, 17, 812–822. [Google Scholar] [CrossRef]
- Narayanan, R.M.; Zenaldin, M. Radar micro-Doppler signatures of various human activities. IET Radar Sonar Navig. 2015, 9, 1205–1215. [Google Scholar] [CrossRef]
- Alnujaim, I.; Oh, D.; Kim, Y. Generative adversarial networks for classification of micro-Doppler signatures of human activity. IEEE Geosci. Remote Sens. Lett. 2019, 17, 396–400. [Google Scholar] [CrossRef]
- Kim, Y.; Ling, H. Human activity classification based on microDoppler signatures using a support vector machine. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1328–1337. [Google Scholar]
- Kim, Y.; Moon, T. Human detection and activity classification based on micro-Doppler signatures using deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2015, 13, 8–12. [Google Scholar] [CrossRef]
- Zhao, R.; Ma, X.; Liu, X.; Li, F. Continuous human motion recognition using micro-Doppler signatures in the scenario with micro motion interference. IEEE Sens. J. 2020, 21, 5022–5034. [Google Scholar] [CrossRef]
- Luo, F.; Poslad, S.; Bodanese, E. Human activity detection and coarse localization outdoors using micro-Doppler signatures. IEEE Sens. J. 2019, 19, 8079–8094. [Google Scholar] [CrossRef]
- Qiao, X.; Amin, M.G.; Shan, T.; Zeng, Z.; Tao, R. Human activity classification based on micro-Doppler signatures separation. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5105014. [Google Scholar] [CrossRef]
- Li, Y.; Xia, W.; Dong, S. Time-based multi-component irregular FM micro-Doppler signals decomposition via STVMD. IET Radar Sonar Navig. 2020, 14, 1502–1511. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, W.; Li, D.; Zhang, J. A novel time-frequency model, analysis and parameter estimation approach: Towards multiple close and crossed chirp modes. Signal Process. 2022, 201, 108692. [Google Scholar] [CrossRef]
- Li, W.; Yang, J.; Zhang, Y.; Lu, J. Robust wideband beamforming method for linear frequency modulation signals based on digital dechirp processing. IET Radar Sonar Navig. 2019, 13, 283–289. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, T.; Li, J.; Stoica, P. Sinusoidal parameter estimation from signed measurements via majorization–minimization based RELAX. IEEE Trans. Signal Process. 2019, 67, 2173–2186. [Google Scholar] [CrossRef]
- Serbes, A.; Qaraqe, K. A fast method for estimating frequencies of multiple sinusoidals. IEEE Signal Process. Lett. 2020, 27, 386–390. [Google Scholar] [CrossRef]
- Shao, S.; Zhang, L.; Wei, J.; Liu, H. Two-dimension joint super-resolution ISAR imaging with joint motion compensation and azimuth scaling. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1411–1415. [Google Scholar] [CrossRef]
- Erol, B.; Amin, M.G. Radar data cube processing for human activity recognition using multisubspace learning. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 3617–3628. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, L.; Huang, W.; Wu, H.; Song, A. Deformable convolutional networks for multimodal human activity recognition using wearable sensors. IEEE Trans. Instrum. Meas. 2022, 71, 2505414. [Google Scholar] [CrossRef]
- Mansour, R.F.; Aljehane, N.O. An optimal segmentation with deep learning based inception network model for intracranial hemorrhage diagnosis. Neural Comput. Appl. 2021, 33, 13831–13843. [Google Scholar] [CrossRef]
- Hanif, A.; Muaz, M.; Hasan, A.; Adeel, M. Micro-Doppler based target recognition with radars: A review. IEEE Sens. J. 2022, 22, 2948–2961. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Radar Parameters | Value |
|---|---|
| Start Frequency | 77 GHz |
| Frequency Slope | 33 MHz/μs |
| Idle Time | 100 μs |
| Bandwidth | 1.981 MHz |
| ADC Start Time | 6 μs |
| ADC Samples | 256 |
| Sample Rate | 5 MHz |
| Number of Chirps | 128 |
| Number of Frames | 64 |
| Actions | Classification |
|---|---|
| Fall Fast | Fall |
| Fall Slowly | Fall |
| Bend | Not Fall |
| Turn Around | Not Fall |
| Walk | Not Fall |
| Step in Situ | Not Fall |
| Training Parameters | Value |
|---|---|
| Optimizer | Adam |
| Train-test Ratio | 7:3 |
| Learning Rate | 0.0001 |
| Batchsize | 32 |
| Iterations | 300 |
| Epoch | 60 |
| Method | Network | Accuracy | Prediction Time | Average Accuracy |
|---|---|---|---|---|
| Single-view-based Relax mechanism (90°) | Resnet | 81.90% | 0.3424 ms | 78.83% |
| VGG | 76.15% | 0.2004 ms | ||
| Inception | 78.45% | 0.5313 ms | ||
| Dual-view-based Relax mechanism | Resnet | 93.36% | 0.3543 ms | 92.34% |
| VGG | 90.36% | 0.2122 ms | ||
| Inception | 93.30% | 0.5591 ms | ||
| Traditional micro-Doppler spectrum mechanism | Resnet | 77.66% | 0.3562 ms | 74.75% |
| VGG | 71.56% | 0.2141 ms | ||
| Inception | 75.04% | 0.5869 ms |
| Method | Network | F1 | Mcc |
|---|---|---|---|
| Single-view-based Relax mechanism (90°) | Resnet | 0.8021 | 0.7988 |
| VGG | 0.7663 | 0.8864 | |
| Inception | 0.7286 | 0.7766 | |
| Dual-view-based Relax mechanism | Resnet | 0.8842 | 0.9769 |
| VGG | 0.9247 | 0.9654 | |
| Inception | 0.8654 | 0.9887 | |
| Micro-Doppler spectrum mechanism | Resnet | 0.5889 | 0.6672 |
| VGG | 0.6077 | 0.6474 | |
| Inception | 0.6285 | 0.6988 |
| Method | AUC |
|---|---|
| Single-view-based Relax mechanism (90°) | 0.7071 |
| Dual-view-based Relax mechanism | 0.8163 |
| Micro-Doppler spectrum mechanism | 0.6438 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Shan, Z.; Zhao, Z.; Xu, Z.; Zhang, T.; Zhou, Z.; Deng, B.; Guan, Z. Millimeter-Wave Radar Monitoring for Elder’s Fall Based on Multi-View Parameter Fusion Estimation and Recognition. Remote Sens. 2023, 15, 2101. https://doi.org/10.3390/rs15082101
Feng X, Shan Z, Zhao Z, Xu Z, Zhang T, Zhou Z, Deng B, Guan Z. Millimeter-Wave Radar Monitoring for Elder’s Fall Based on Multi-View Parameter Fusion Estimation and Recognition. Remote Sensing. 2023; 15(8):2101. https://doi.org/10.3390/rs15082101
Chicago/Turabian StyleFeng, Xiang, Zhengliang Shan, Zhanfeng Zhao, Zirui Xu, Tianpeng Zhang, Zihe Zhou, Bo Deng, and Zirui Guan. 2023. "Millimeter-Wave Radar Monitoring for Elder’s Fall Based on Multi-View Parameter Fusion Estimation and Recognition" Remote Sensing 15, no. 8: 2101. https://doi.org/10.3390/rs15082101