
A Real-Time Linear Prediction Algorithm for Detecting Abnormal BDS-2/BDS-3 Satellite Clock Offsets
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Linear Clock Prediction Model and Prediction Threshold Set
2.2. Linear Moving Short-Term Clock Prediction and Anomaly Detection Algorithm
3. Experiments, Results, and Discussion
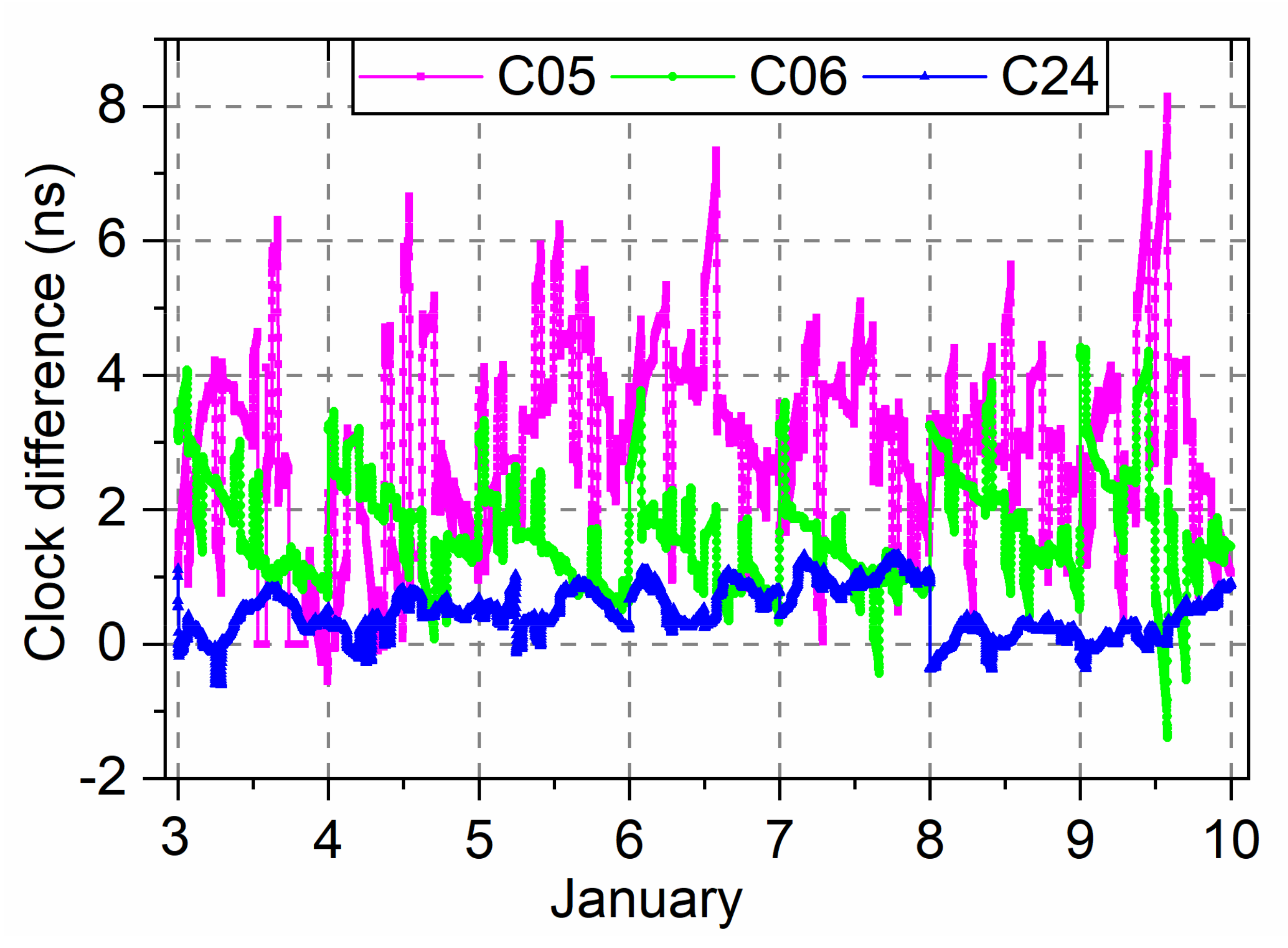
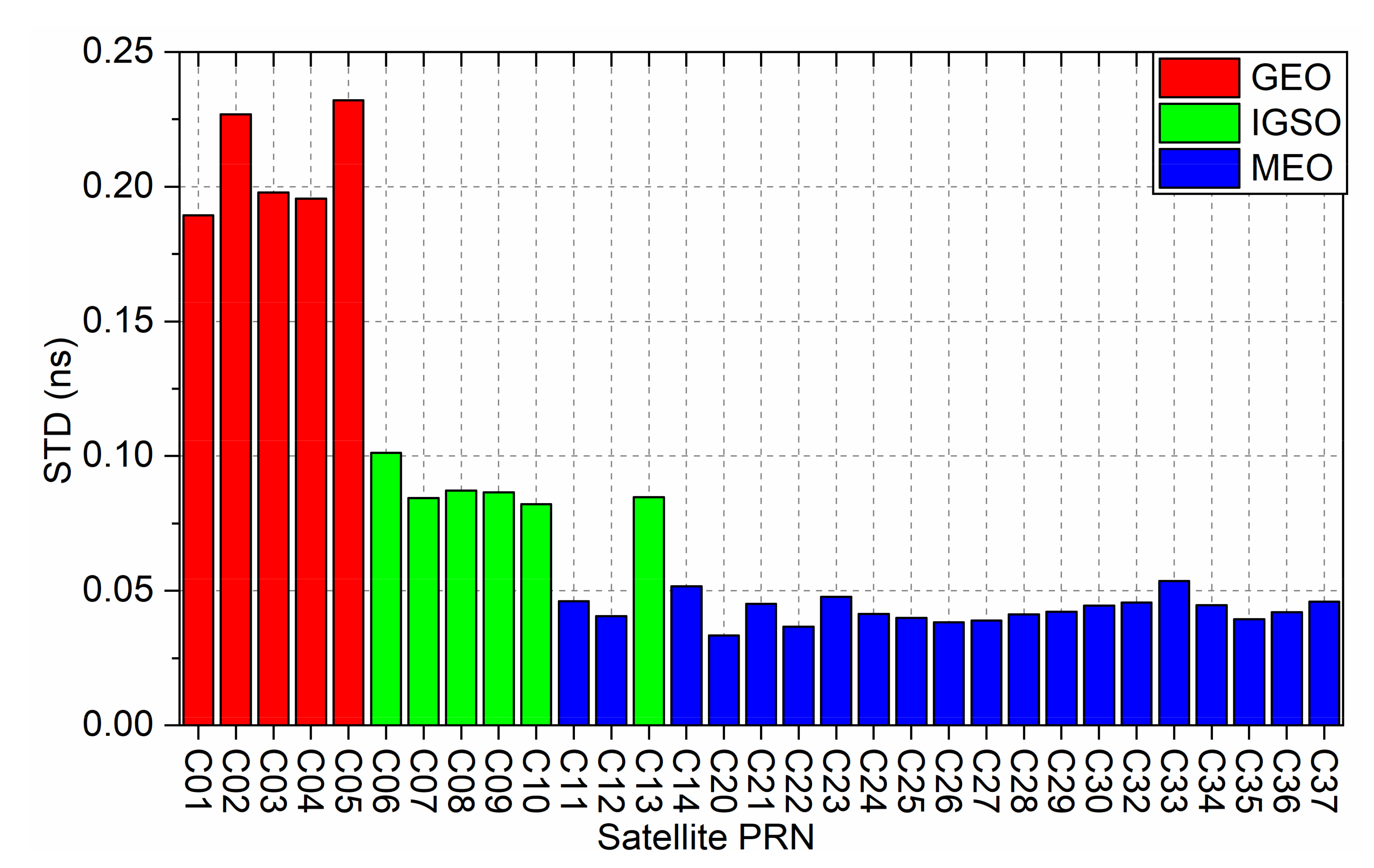
3.1. Abnormal Values in the Estimated Real-Time BDS-2/BDS-3 Clock Offsets
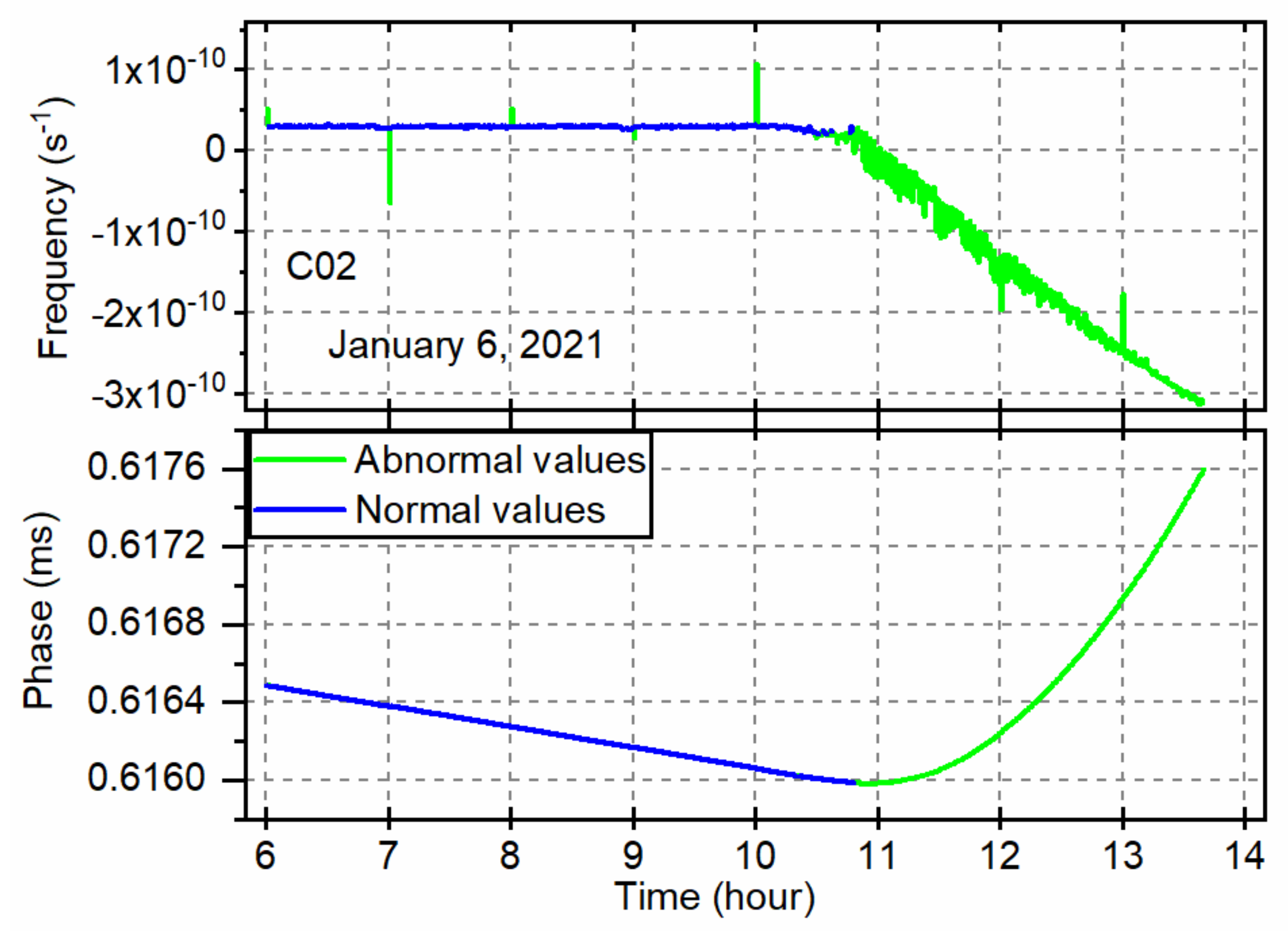
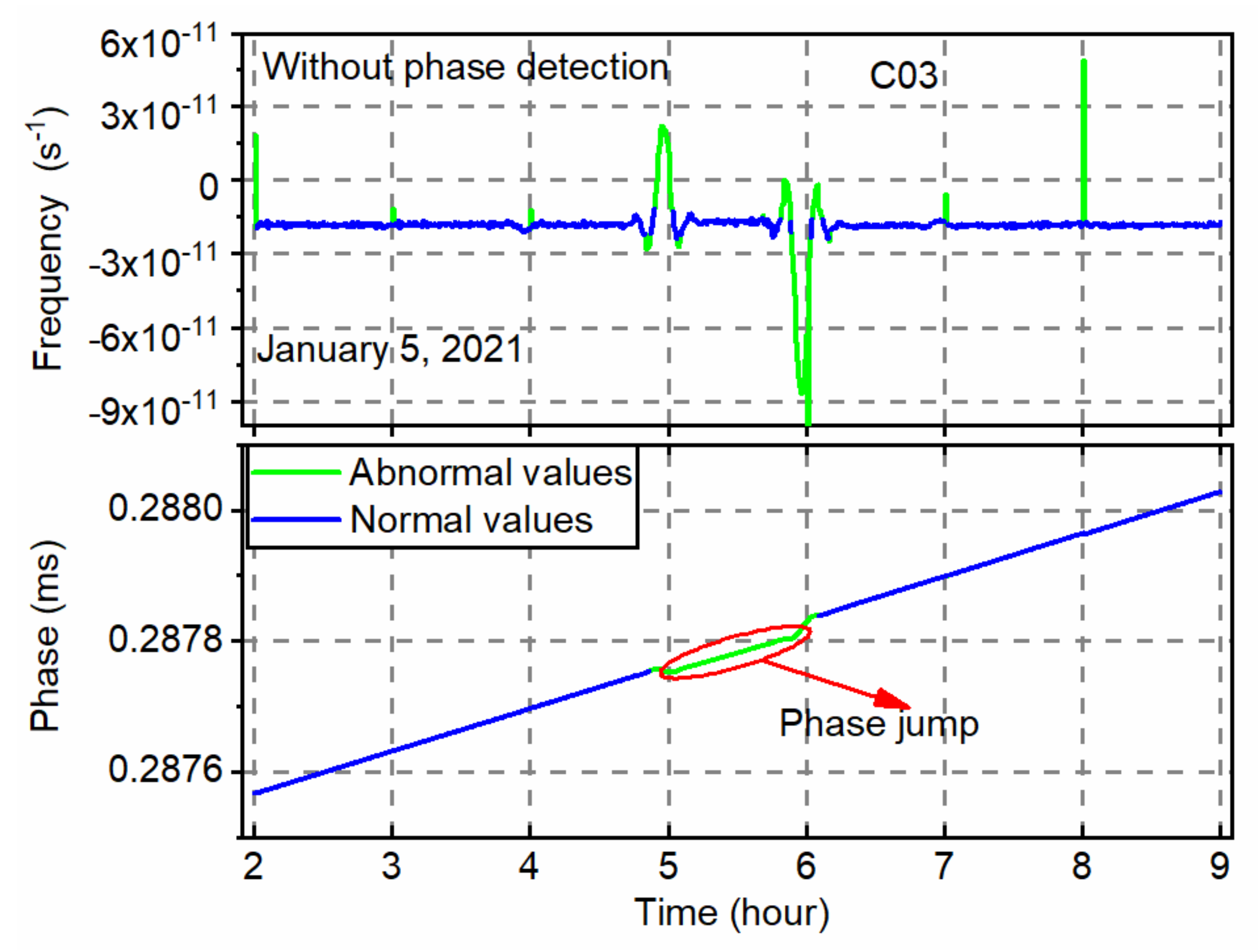
3.2. Three Kinds of Typical Abnormal Real-Time Clock Offsets and Detection Algorithm Validation
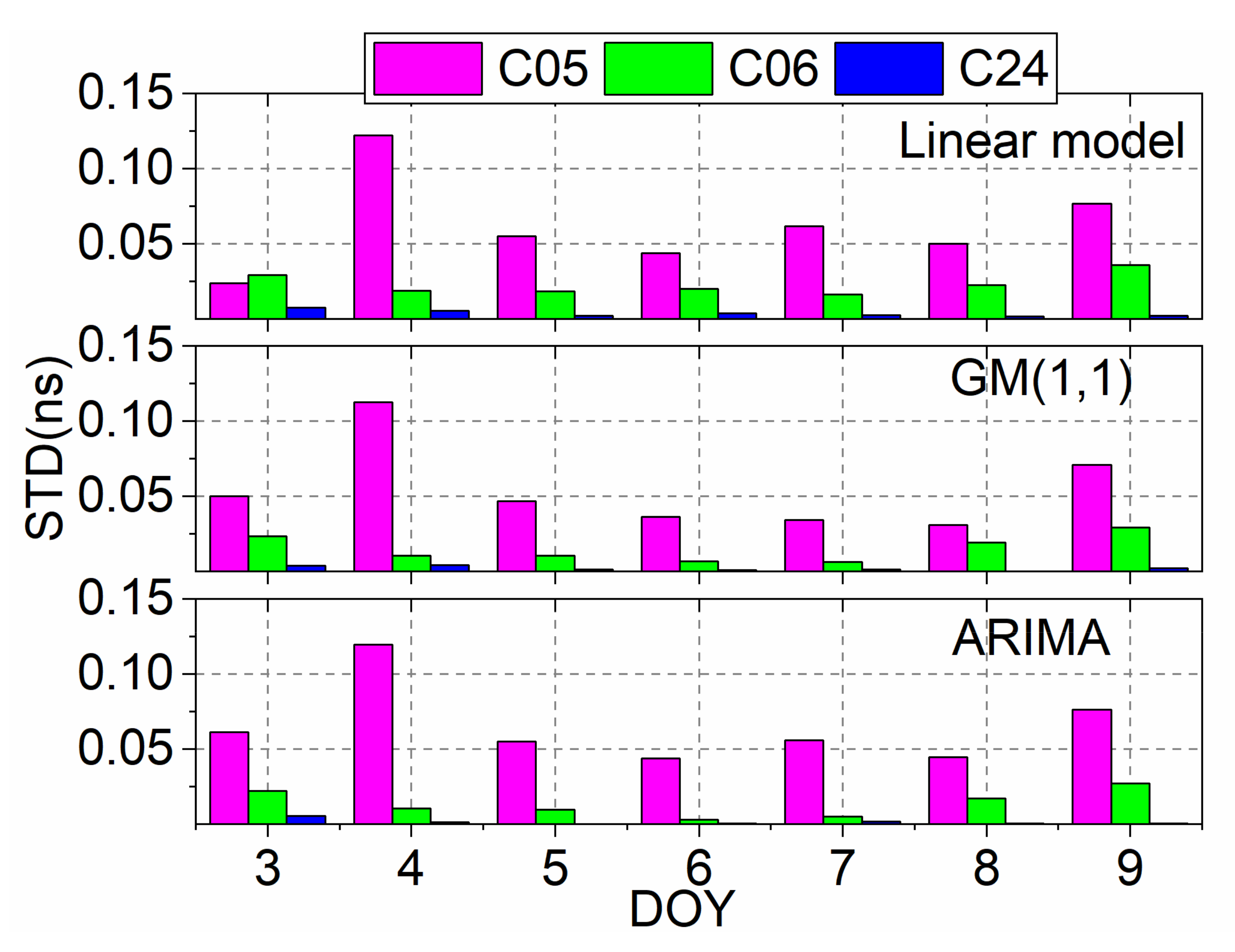
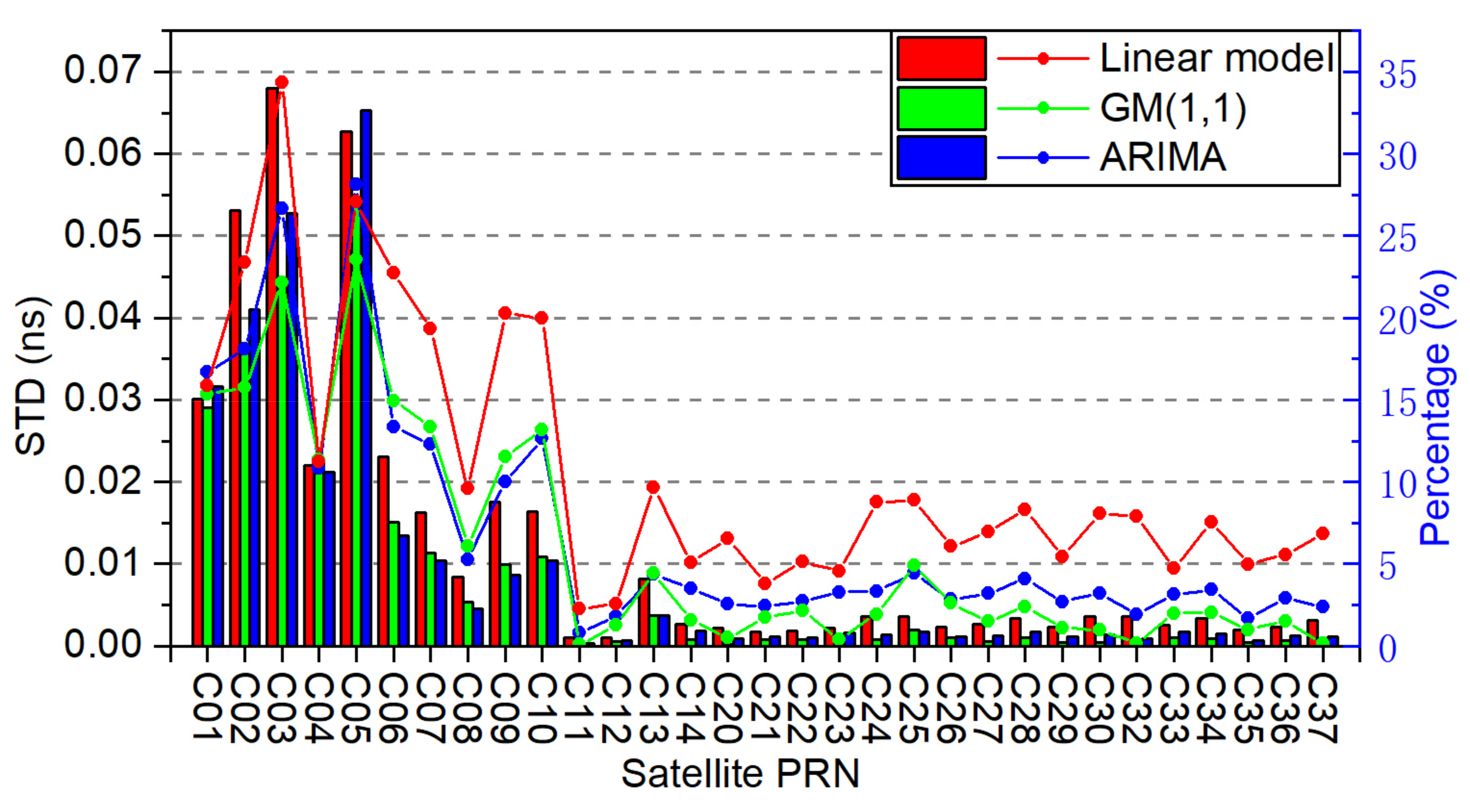
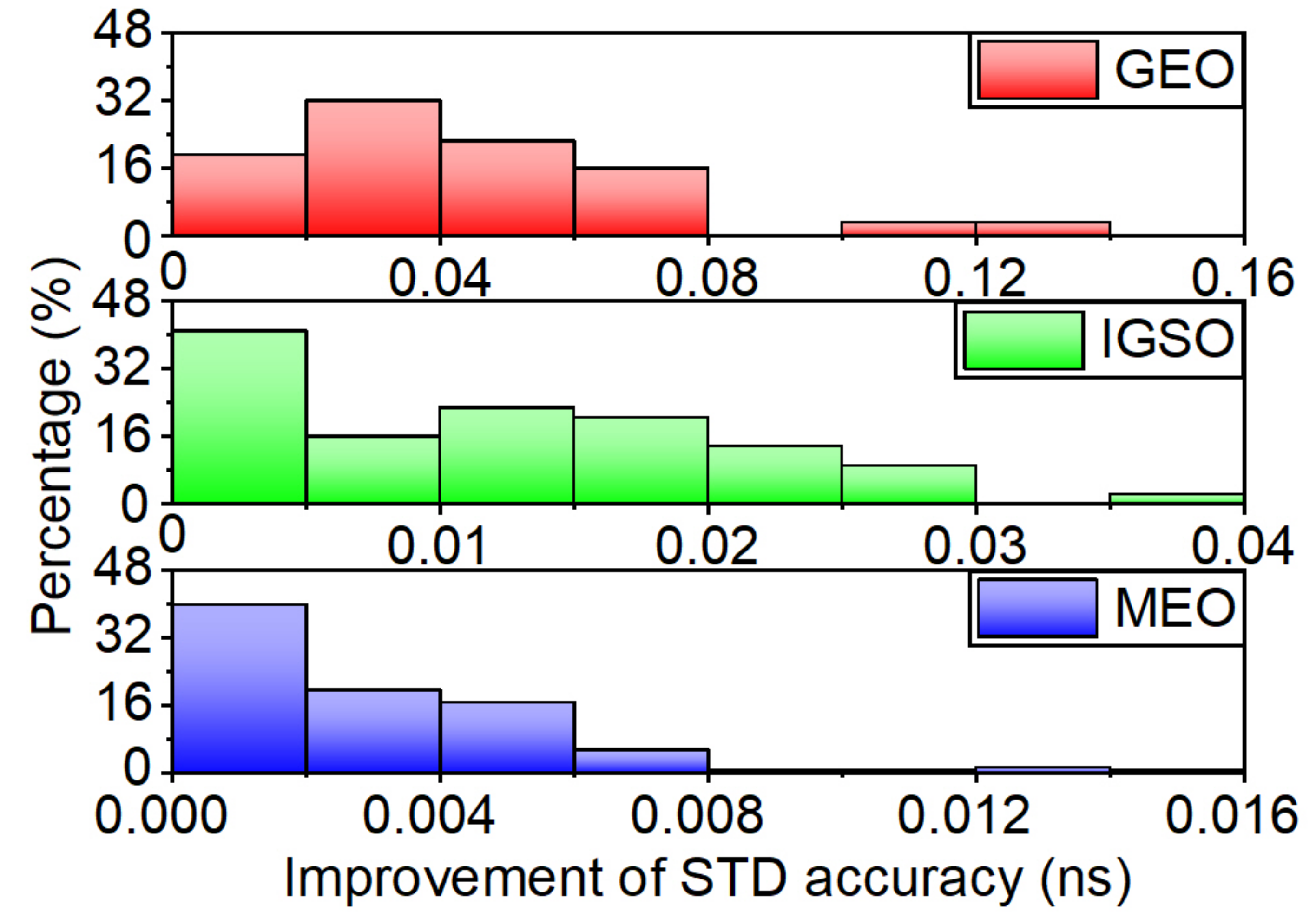
3.3. Improvement of Clock Performance after Removing Abnormal Values
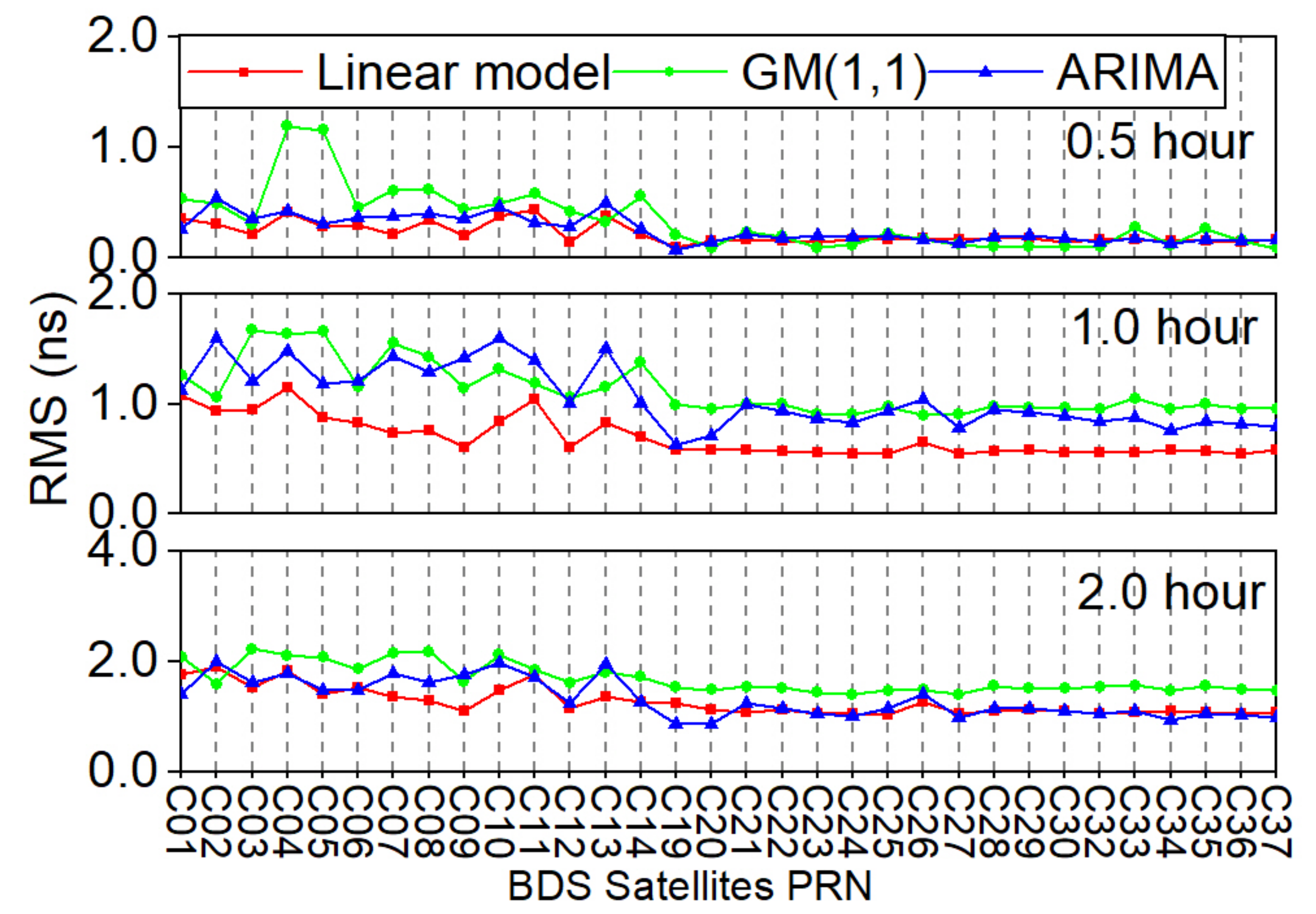
3.4. Performance of the Real-Time Linear Clock Prediction Algorithm
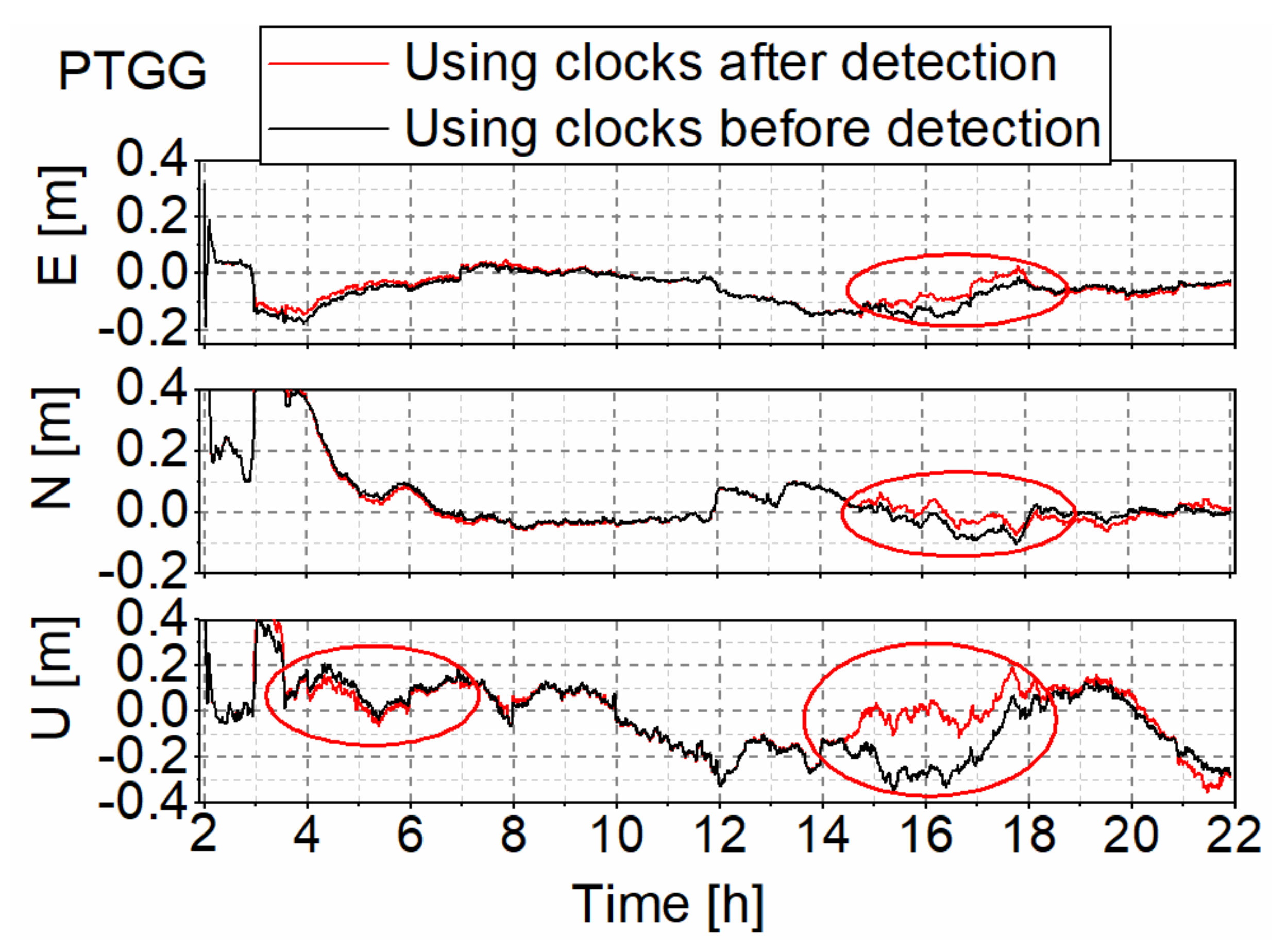
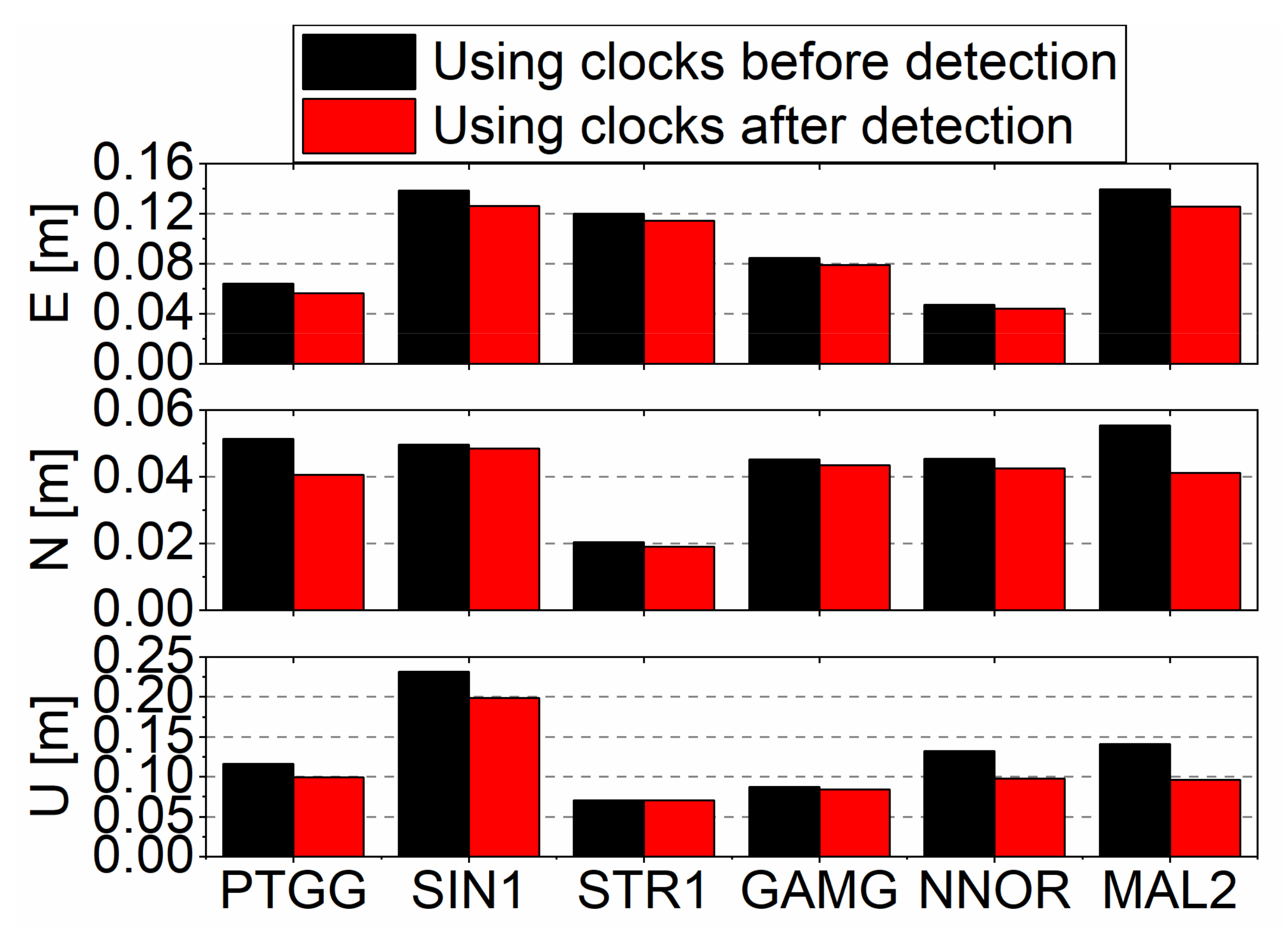
3.5. PPP Validation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, A.G.; Xu, Z.Q.; Xu, X.C.; Zhu, H.Z.; Sui, X.; Sun, H.S. Precise Point Positioning Using the Regional BeiDou Navigation Satellite Constellation. J. Navig. 2014, 64, 523–537. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.T.; Li, B.F.; Nie, L.W.; Wei, C.X.; Jia, S.; Jiang, S.Q. Initial assessment of BeiDou-3 global navigation satellite system: Signal quality, RTK and PPP. GPS Solut. 2019, 23, 111. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Steigenberger, P. Short-term analysis of GNSS clocks. GPS Soult. 2013, 17, 295–307. [Google Scholar] [CrossRef]
- Galleani, L.; Tavella, P. Detection and identification of atomic clock anomalies. Metrologia 2008, 45, S127–S133. [Google Scholar] [CrossRef]
- El-Mowafy, A. Impact of predicting real-time clock corrections during their outages on precise point positioning. Surv. Rev. 2019, 51, 183–192. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; El-Mowafy, A. LEO satellite clock analysis and prediction for positioning applications. Geospat. Inf. Sci. 2021, 25, 14–33. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Soult. 2018, 19, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.L.; Zhan, X.Q.; Du, G.; Liu, M.H. Compass/BeiDou-2 spaceborne clock performance assessment and its error detection, mitigation. IEEJ Trans. Electr. Electron. Eng. 2015, 10, 438–446. [Google Scholar] [CrossRef]
- Sesia, I.; Tavella, P. Estimating the Allan variance in the presence of long periods of missing data and outliers. Metrologia 2008, 45, S134–S142. [Google Scholar] [CrossRef]
- Zhang, Q.Q.; Gui, Q.M. Bayesian methods for outliers detection in GNSS time series. J. Geod. 2013, 87, 609–627. [Google Scholar]
- Yang, Y.F.; Pan, X.; Qing, C.X.; Mei, C.S.; Lai, Z.L. Detection and repair of outliers in BDS satellite clock offset based on semiparametric mean drift model. Chin. J. Sci. Instrum. 2020, 41, 47–54. [Google Scholar]
- Pan, X.; Lv, Y.T.; Wang, Y.; Luo, J.; Xu, J.T. Research of the Location and Valuation of Gross Offsets Based on Semi-parametric Adjustment Model. Geomat. Inf. Sci. Wuhan Univ. 2016, 41, 1421–1426. [Google Scholar]
- Louni, H. Outier Detection in ARMA Models. J. Time Ser. Anal. 2008, 29, 1057–1065. [Google Scholar] [CrossRef]
- Ma, C.Z.; Zhu, J.Q.; Han, S.H. Model Selection Method Based on ARIMA Model in Outliers Detection of Satellite Clock Offset. Geomat. Inf. Sci. Wuhan Univ. 2020, 45, 167–172. [Google Scholar]
- Huang, B.H.; Ji, Z.X.; Zhai, R.J.; Xiao, C.F.; Yang, F.; Yang, B.H.; Wang, Y.P. Clock bias prediction algorithm for navigation satellites based on a supervised learning long short-term memory neural network. GPS Soult. 2021, 25, 80. [Google Scholar] [CrossRef]
- Wen, T.L.; Ou, G.; Tang, X.M.; Zhang, P.Y.; Wang, P.C. A Novel Long Short-Term Memory Predicted Algorithm for BDS Short-Term Satellite Clock Offsets. Int. J. Aerosp. Eng. 2021, 4066275. [Google Scholar] [CrossRef]
- Kirsten, L.; Penina, A. Improved prediction of GPS satellite clock sub-daily variations based on daily repeat. GPS Soult. 2018, 22, 58. [Google Scholar]
- Lee, S.W.; Kim, J.; Jeong, M.S.; Lee, Y.J. Monitoring atomic clocks on board GNSS satellites. Adv. Space Res. 2011, 47, 1654–1663. [Google Scholar] [CrossRef]
- Huang, G.W.; Zhang, Q.; Xu, G.C. Real-time clock offset prediction with an improved model. GPS Soult. 2014, 18, 95–104. [Google Scholar] [CrossRef]
- Ye, Y.U.; Zhang, H.; Xiaohui, L.I. A new method of GM(1,1)satellite clock bias prediction with error prediction correction. Sci. Surv. Mapp. 2019, 44, 814. [Google Scholar]
- Ge, H.B.; Li, B.F.; Wu, T.H.; Jiang, S.H. Prediction models of GNSS satellite clock errors: Evaluation and application in PPP. Adv. Space Res. 2021, 6, 2470–2487. [Google Scholar] [CrossRef]
- Yu, H.L.; Hao, J.M.; Liu, W.P.; Tian, Y.G.; Zhang, H. Analysis of Model In Ultra Short-term Predicting Satellite Clock Error. J. Geod. Geodyn. 2014, 34, 161–164. [Google Scholar]
- Wang, B.; Lou, Y.D.; Liu, J.N.; Zhao, Q.L.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Soult. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Fu, W.J.; Wang, L.; Chen, R.Z.; Han, Y.; Zhou, H.T.; Li, T. Combined BDS-2/BDS-3 real-time satellite clock estimation with the overlapping B1I/B3I signals. Adv. Space Res. 2021, 68, 4470–4483. [Google Scholar] [CrossRef]
- Chen, G.; Gao, Y.P.; Fu, W.J.; Chen, X.; Yang, J.L. Availability and Prediction Performance Evaluation of BDS-3 Satellite Clock Error Products. In China Satellite Navigation Conference (CSNC 2021) Proceedings; Lecture Notes in Electrical Engineering; Springer: Singapore, 2021; Volume 772. [Google Scholar]
- Chen, L.; Zhao, Q.; Hu, Z.; Jiang, X.; Geng, C.; Ge, M.; Shi, C. GNSS global real-time augmentation positioning: Real-time precise satellite clock estimation, prototype system construction and performance analysis. Adv. Space Res. 2018, 61, 367–384. [Google Scholar] [CrossRef]
- Yu, D.Y.; Ji, B.; Liu, Y.; Wu, S.G.; Li, H.P.; Bian, S.F. Performance assessment of RTPPP positioning with SSR corrections and PPP-AR positioning with FCB for multi-GNSS from MADOCA products. Adv. Space Res. 2023, 6, P2924–P2937. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit Type | Linear Model | GM(1,1) | ARIMA |
|---|---|---|---|
| GEO | 22.4% (0.048 ns) | 17.1% (0.037 ns) | 20.1% (0.048 ns) |
| IGSO | 16.9% (0.014 ns) | 10.7% (0.009 ns) | 9.7% (0.009 ns) |
| MEO | 5.9% (0.002 ns) | 1.5% (0.001 ns) | 2.8% (0.001 ns) |
| BDS-2 | 19.7% (0.032 ns) | 13.9% (0.023 ns) | 14.9% (0.029 ns) |
| BDS-3 | 5.9% (0.002 ns) | 1.5% (0.001 ns) | 2.8% (0.001 ns) |
| Items | PPP |
|---|---|
| Observations | Undifferenced B1I/B3I phase and code ionosphere-free combination observation |
| Elevation mask | 10° |
| Observation weight | Elevation-dependent weight, 1 for E > 30° otherwise 2sin(E) |
| Phase-windup effect | corrected |
| Satellite antenna phase center and variation | igs14_2136.atx |
| Receiver antenna phase center and variation | igs14_2136.atx |
| Station displacement | Solid Earth tide, pole tide, ocean tide, loading: IERS Convention 2010 |
| Relativistic effects | Corrected: IERS Convention 2010 |
| Items | PPP |
| Station | E (cm) | N (cm) | U (cm) |
|---|---|---|---|
| PTGG | 0.7 | 1.1 | 1.7 |
| SIN1 | 1.2 | 0.1 | 3.3 |
| STR1 | 0.6 | 0.1 | 0.1 |
| GAMG | 0.6 | 0.2 | 0.4 |
| NNOR | 0.3 | 0.3 | 3.4 |
| MAL2 | 1.4 | 1.4 | 4.5 |
| Average | 0. 8 | 0. 6 | 2.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, Y.; Chen, G.; Fu, W.; Chen, X.; Ma, L.; Luo, T.; Xue, D. A Real-Time Linear Prediction Algorithm for Detecting Abnormal BDS-2/BDS-3 Satellite Clock Offsets. Remote Sens. 2023, 15, 1831. https://doi.org/10.3390/rs15071831
Gao Y, Chen G, Fu W, Chen X, Ma L, Luo T, Xue D. A Real-Time Linear Prediction Algorithm for Detecting Abnormal BDS-2/BDS-3 Satellite Clock Offsets. Remote Sensing. 2023; 15(7):1831. https://doi.org/10.3390/rs15071831
Chicago/Turabian StyleGao, Yaping, Guo Chen, Wenju Fu, Xi Chen, Liangliang Ma, Tong Luo, and Dongdong Xue. 2023. "A Real-Time Linear Prediction Algorithm for Detecting Abnormal BDS-2/BDS-3 Satellite Clock Offsets" Remote Sensing 15, no. 7: 1831. https://doi.org/10.3390/rs15071831