
Absolute Localization of Targets Using a Phase-Measuring Sidescan Sonar in Very Shallow Waters
Abstract
:1. Introduction
2. Materials and Methods
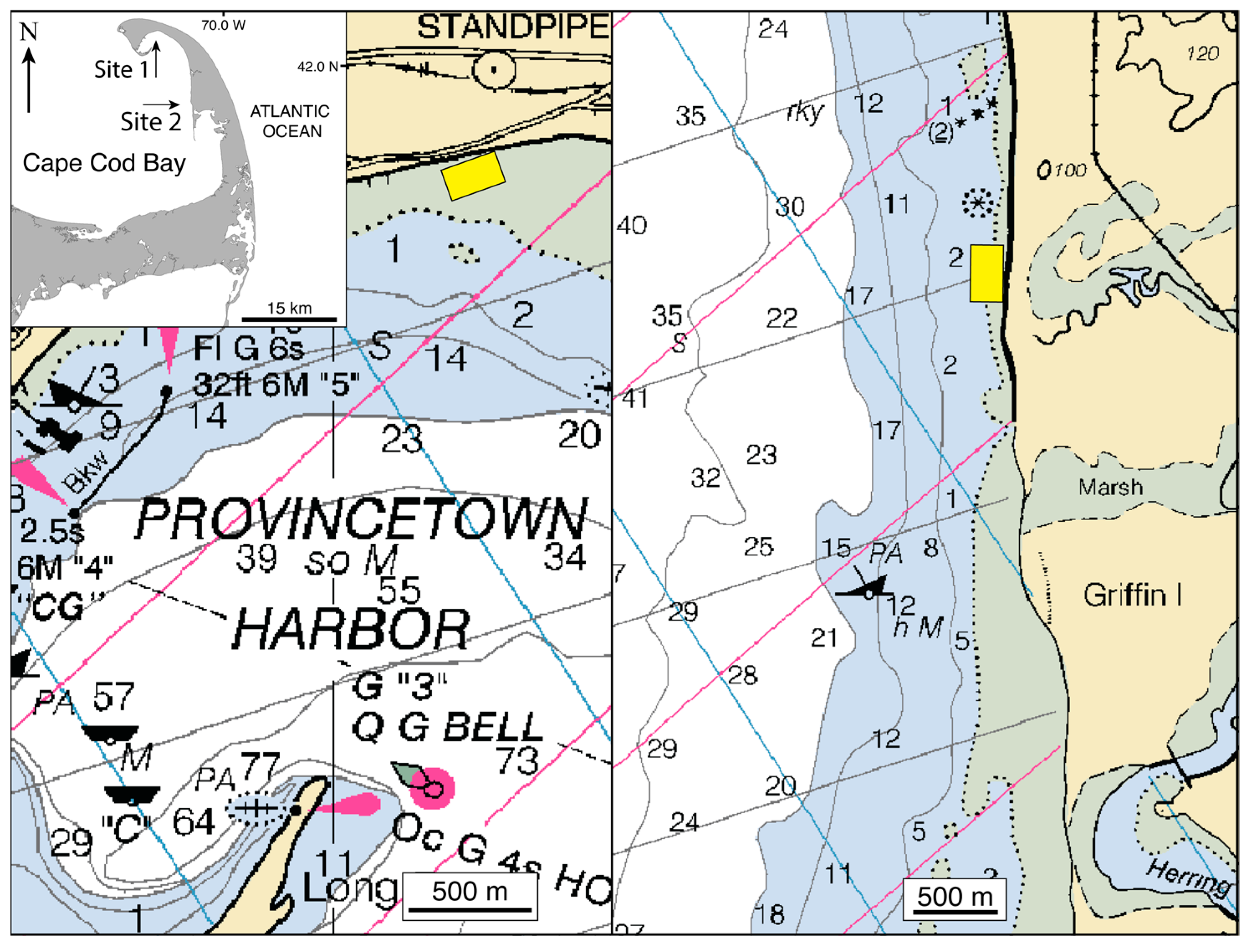
2.1. Field Setting
2.1.1. Site 1: Provincetown Harbor, Sandy Intertidal Flat
2.1.2. Site 2: Duck Harbor Beach, Wellfleet, MA—Mixed Sand and Gravel Beach
2.2. Unoccupied Aerial System Data
2.3. Vessel-Based Acoustic Data
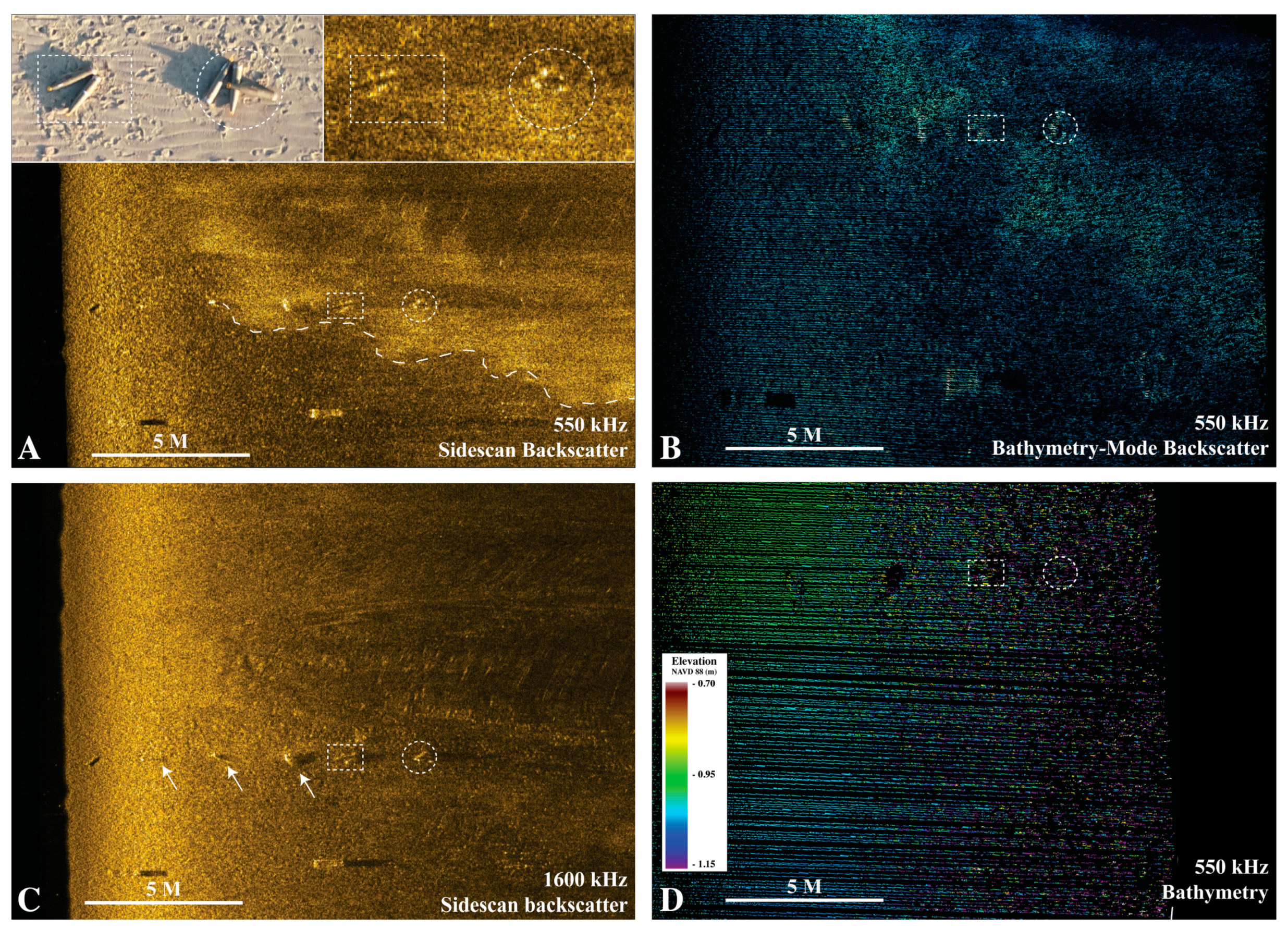
2.3.1. Sidescan Backscatter
2.3.2. Bathymetry
2.3.3. Bathymetry-Mode Backscatter (BMB)
3. Results
3.1. UAS Data
3.2. Vessel-Based Acoustic Data
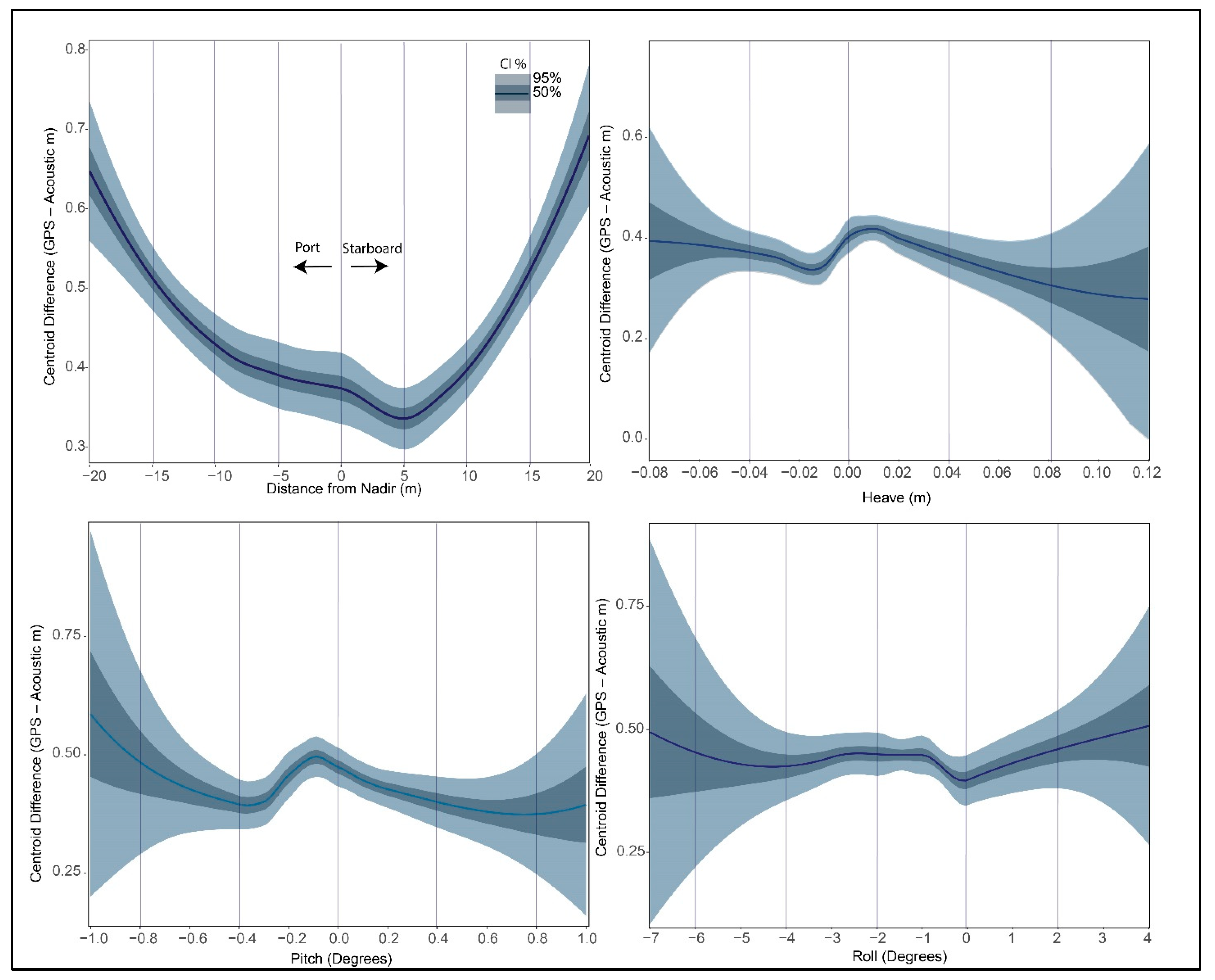
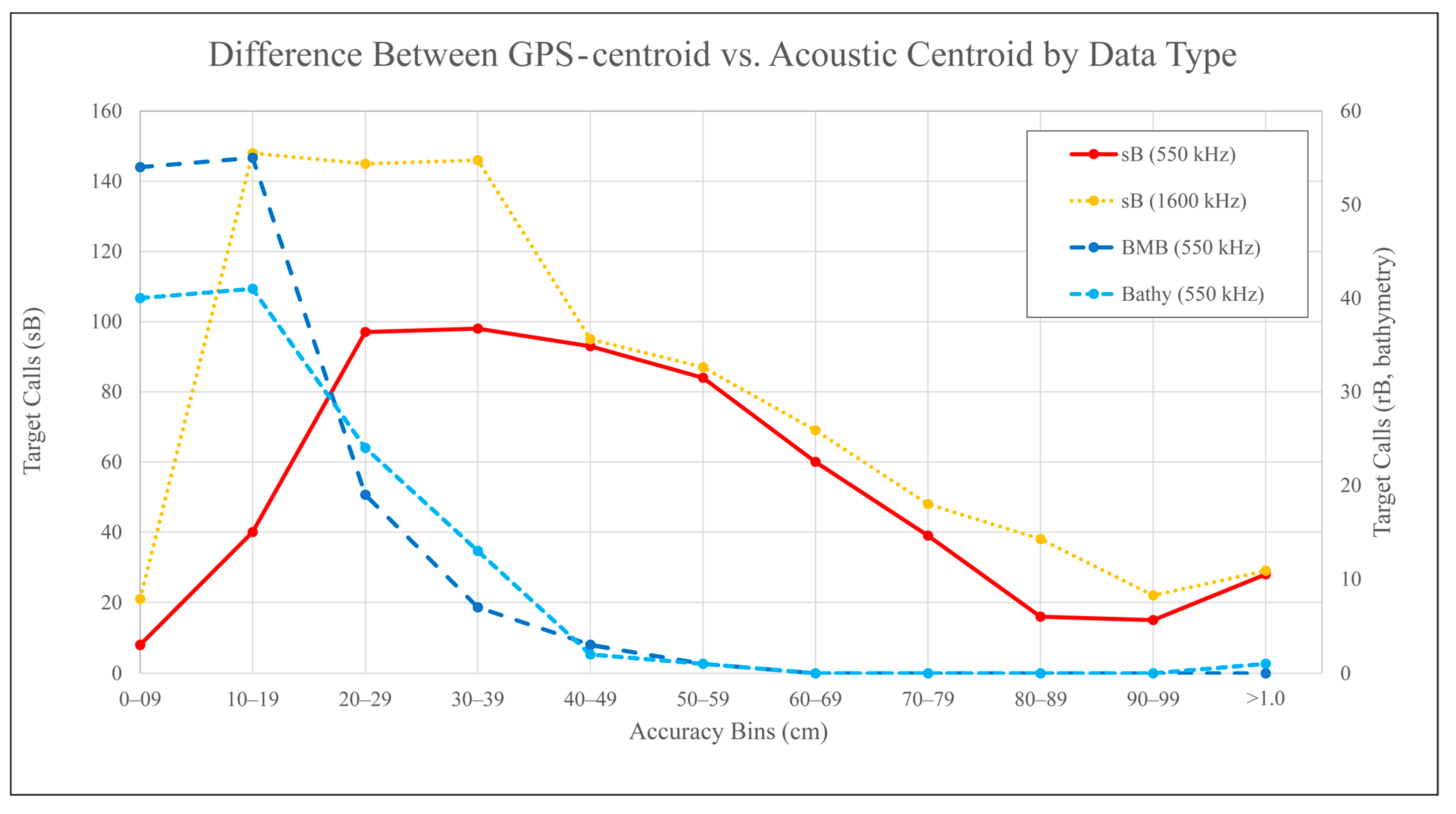
3.2.1. Sidescan Backscatter: Accuracy of Absolute Localization and Sources of Uncertainty
3.2.2. Bathymetry and Bathymetry-Mode Backscatter: Accuracy of Absolute Localization
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alevizos, E.; Snellen, M.; Simons, D.; Siemes, K.; Greinert, J. Multi-angle backscatter classification and sub-bottom profiling for improved seafloor characterization. Mar. Geophys. Res. 2017, 39, 289–306. [Google Scholar] [CrossRef]
- Gumusay, M.U.; Bakirman, T.; Kizilkaya, I.T.; Aykut, N.O. A review of seagrass detection, mapping and monitoring applications using acoustic systems. Eur. J. Remote Sens. 2018, 52, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Herkül, K.; Peterson, A.; Paekivi, S. Applying multibeam sonar and mathematical modeling for mapping seabed substrate and biota of offshore shallows. Estuarine Coast. Shelf Sci. 2017, 192, 57–71. [Google Scholar] [CrossRef]
- LaFrance, M.; King, J.W.; Oakley, B.A.; Pratt, S. A comparison of top-down and bottom-up approaches to benthic habitat mapping to inform offshore wind energy development. Cont. Shelf Res. 2014, 83, 24–44. [Google Scholar] [CrossRef]
- Madricardo, F.; Ghezzo, M.; Nesto, N.; Mc Kiver, W.J.; Faussone, G.C.; Fiorin, R.; Riccato, F.; Mackelworth, P.C.; Basta, J.; De Pascalis, F.; et al. How to Deal with Seafloor Marine Litter: An Overview of the State-of-the-Art and Future Perspectives. Front. Mar. Sci. 2020, 7, 830. [Google Scholar] [CrossRef]
- Misiuk, B.; Brown, C.J. Multiple imputation of multibeam angular response data for high resolution full coverage seabed mapping. Mar. Geophys. Res. 2022, 43, 1–20. [Google Scholar] [CrossRef]
- Richardson, M.; Nelson, H.; Williams, K.; Calantoni, J. SERDP/ESTCP munitions response program: Underwater remediation of unexploded ordnance (UXO). In Proceeding of the Underwater Acoustics Conference and Exhibition (UACE), Hersonissos, Greece, 8–12 July 2019. [Google Scholar]
- Wehner, D.; Frey, T. Offshore Unexploded Ordnance Detection and Data Quality Control—A Guideline. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2022, 15, 7483–7498. [Google Scholar] [CrossRef]
- Etter, D.; Delaney, B. Report of the Defense Science Board Task Force on Unexploded Ordnance; Defense Science Board: Washington, DC, USA, 2003. [Google Scholar] [CrossRef]
- SERDP-ESTCP. Munitions in the Underwater Environment: State of the Science and Knowledge, Strategic Environmental Research and Development Program (SERDP); Environmental Security Technology Certification Program (ESTCP): Washington, DC, USA, 2010. [Google Scholar]
- Hożyń, S. A Review of Underwater Mine Detection and Classification in Sonar Imagery. Electronics 2021, 10, 2943. [Google Scholar] [CrossRef]
- Brown, D.C.; Johnson, S.F.; Gerg, I.D.; Brownstead, C.F. Simulation and testing results for a sub-bottom imaging sonar. In Proceedings of Meetings on Acoustics 178ASA; Acoustical Society of America: San Diego, CA, USA, 2019; p. 070001. [Google Scholar]
- Hansen, R.E. Mapping the ocean floor in extreme resolution using interferometric synthetic aperture sonar. Proc. Meet. Acoust. Acoust. Soc. Am. 2019, 38, 055003. [Google Scholar] [CrossRef] [Green Version]
- Keenan, S.T.; Clark, D.; Blay, K.R.; Leslie, K.; Foley, C.P.; Billings, S. Calibration and testing of a HTS tensor gradiometer for underwater UXO detection. In Proceedings of the 2011 International Conference on Applied Superconductivity and Electromagnetic Devices, Sydney, NSW, Australia, 14–16 December 2011; IEEE: Sydney, NSW, Australia, 2011; pp. 135–137. [Google Scholar]
- Marston, T.M.; Williams, A.T.; Plotnick, D.S. Sub-aperture recombination for sliding window SAS processing in 3D down-looking synthetic aperture sonar, EUSAR 2021. In Proceedings of the 13th European Conference on Synthetic Aperture Radar, Online, 29 March–1 April 2021; pp. 1–6. [Google Scholar]
- Yu, Y.; Zhao, J.; Gong, Q.; Huang, C.; Zheng, G.; Ma, J. Real-Time Underwater Maritime Object Detection in Side-Scan Sonar Images Based on Transformer-YOLOv5. Remote Sens. 2021, 13, 3555. [Google Scholar] [CrossRef]
- Yulin, T.; Jin, S.; Bian, G.; Zhang, Y. Shipwreck Target Recognition in Side-Scan Sonar Images by Improved YOLOv3 Model Based on Transfer Learning. IEEE Access 2020, 8, 173450–173460. [Google Scholar] [CrossRef]
- Jerram, K.; Schmidt, V. Storm Response Surveying with Phase-Measuring Bathymetric Sidescan Sonar; Center for Coastal and Ocean Mapping, UNH: Durham, NH, USA, 2015; p. 20. [Google Scholar]
- Trembanis, A.; DuVal, C.; Beaudoin, J.; Schmidt, V.; Miller, D.; Mayer, L. A detailed seabed signature from Hurricane Sandy revealed in bedforms and scour. Geochem. Geophys. Geosystems 2013, 14, 4334–4340. [Google Scholar] [CrossRef] [Green Version]
- Borrelli, M.; Fox, S.E.; Shumchenia, E.J.; Kennedy, C.G.; Oakley, B.A.; Hubeny, J.B.; Love, H.; Smith, T.L.; Legare, B.; Mittermayr, A.; et al. Submerged Marine Habitat Mapping, Cape Cod National Seashore: A Post-Hurricane Sandy Study; Natural Resource Report NPS/NCBN/NRR—2019/1877; National Park Service: Fort Collins, CO, USA, 2019. [Google Scholar] [CrossRef]
- Grouthues, T.M.; Levin, D.; Psuty, N.P.; Habeck, A.; Petrecca, R.; Dobarro, J. Submerged Marine Habitat Mapping at Sandy Hook Unit, Gateway National Recreation Area: A Post-Hurricane Sandy Study; Natural Resource Report NPS/NCBN/NRR—2019/1865; National Park Service: Fort Collins, CO, USA, 2019. [Google Scholar]
- Bartley, M.L.; King, J.W.; Oakley, B.A.; Caccioppoli, B.J. Post-Hurricane Sandy Benthic Habitat Mapping at Fire Island National Seashore, New York, USA, Utilizing the Coastal and Marine Ecological Classification Standard (CMECS). Estuaries Coasts 2022, 45, 1070–1094. [Google Scholar] [CrossRef]
- Mittermayr, A.; Legare, B.; Borrelli, M. Applications of the Coastal and Marine Ecological Classification Standard (CMECS) in a Partially Restored New England Salt Marsh Lagoon. Estuaries Coasts 2020, 45, 1095–1106. [Google Scholar] [CrossRef]
- Mittermayr, A.; Legare, B.J.; Kennedy, C.G.; Fox, S.E.; Borrelli, M. Using CMECS to Create Benthic Habitat Maps for Pleasant Bay, Cape Cod, Massachusetts. Northeast. Nat. 2020, 27, 22. [Google Scholar] [CrossRef]
- Trembanis, A.C.; Miller, D.C.; Ebula, E.; Rusch, H.M.; Rothermel, E.R. Submerged Marine Habitat Mapping at Assateague Island National Seashore: A Post-Hurricane Sandy Study; Natural Resource Report NPS/NCBN/NRR—2019/1871; National Park Service: Fort Collins, CO, USA, 2019. [Google Scholar]
- Legare, B.; Mittermayr, A.; Borrelli, M. The impacts of hydraulic clamming in shallow water and the importance of incorporating anthropogenic disturbances into habitat assessments. Aquat. Living Resour. 2020, 33, 13. [Google Scholar] [CrossRef]
- Legare, B.J.; Nichols, O.C.; Borrelli, M. Persistence of Hydraulic Dredge Tracks Following Surfclam Harvesting in Shallow Water. J. Shellfish. Res. 2020, 39, 331–336. [Google Scholar] [CrossRef]
- Borrelli, M.; Smith, T.L.; Mague, S.T. Vessel-Based, Shallow Water Mapping with a Phase-Measuring Sidescan Sonar. Estuaries Coasts 2021, 45, 961–979. [Google Scholar] [CrossRef]
- Hughes Clarke, J.E. Multibeam Echosounders, Submarine Geomorphology; Springer Geology: Cham, Switzerland, 2018; pp. 25–41. [Google Scholar]
- Mayer, L.A.; Raymond, R.; Glang, G.; Richardson, M.D.; Traykovski, P.; Trembanis, A.C. High-Resolution Mapping of Mines and Ripples at the Martha’s Vineyard Coastal Observatory. IEEE J. Ocean. Eng. 2007, 32, 133–149. [Google Scholar] [CrossRef] [Green Version]
- Wolfson, M.L.; Naar, D.F.; Howd, P.A.; Locker, S.D.; Donahue, B.T.; Friedrichs, C.T.; Trembanis, A.C.; Richardson, M.D.; Wever, T.F. Multibeam Observations of Mine Burial Near Clearwater, FL, Including Comparisons to Predictions of Wave-Induced Burial. IEEE J. Ocean. Eng. 2007, 32, 103–118. [Google Scholar] [CrossRef]
- Grall, P.; Kochanska, I.; Marszal, J. Direction-of-Arrival Estimation Methods in Interferometric Echo Sounding. Sensors 2020, 20, 3556. [Google Scholar] [CrossRef]
- Grall, P.; Marszal, J. Method for the correlation coefficient estimation of the bottom echo signal in the shallow water application using interferometric echo sounder. Vib. Phys. Syst. 2021, 32. [Google Scholar]
- Mohammadloo, T.H.; Geen, M.; SSewada, J.; Snellen, M.; GSimons, D. Assessing the Performance of the Phase Difference Bathymetric Sonar Depth Uncertainty Prediction Model. Remote Sens. 2022, 14, 2011. [Google Scholar] [CrossRef]
- Pimentel, L.V.; Florentino, L.C.; Neto, A. Evaluation of the Precision of Phase-Measuring Bathymetric Side Scan Sonar Relative to Multibeam Echosounders. Int. Hydrogr. Rev. 2020, 24, 61–83. [Google Scholar]
- McCormack, B.; Borrelli, M. Shallow Water Object Detection, Characterization, and Localization Through Uncalibrated Reflectivity Backscatter from a Phase-Measuring Sidescan. in preprint.
- dos Santos, P.P.G.M.; Borrelli, M. Estimating Absolute Positional Uncertainties Associated with Bathymetric Data from a Phase-Measuring Sidescan Sonar in Very Shallow Waters. in preprint.
- Uchupi, E.; Giese, G.; Aubrey, D.; Kim, D. The late quaternary construction of Cape Cod, Massachusetts: A reconsideration of the WM Davis model. Geol. Soc. Am. Spec. Pap. 1996, 309, 1–69. [Google Scholar]
- Zeigler, J.M.; Tuttle, S.D.; Tasha, H.J.; Giese, G.S. The Age and Development of The Provincelands Hook, Outer Cape Cod, Massachusetts. Limnol. Oceanogr. 1965, 10, R298–R311. [Google Scholar] [CrossRef]
- Portman, M.E.; Jin, D.; Thunberg, E. The connection between fisheries resources and spatial land use change: The case of two New England fish ports. Land Use Policy 2011, 28, 523–533. [Google Scholar] [CrossRef]
- Oldale, R.N.; O’Hara, C.J. Glaciotectonic origin of the Massachusetts coastal end moraines and a fluctuating late Wisconsinan ice margin. Geol. Soc. Am. Bull. 1984, 95, 61–74. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, 03017. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2019; Available online: https://www.R-project.org/ (accessed on 15 October 2022).
- Wickham, H.; Chang, W.; Henry, L.; Pedersen, T.L.; Takahashi, K.; Wilke, C.; Woo, K.; Yutani, H.; Dunnington, D. Ggplot2: Create Elegant Data Visualisations Using the Grammar of Graphics; R Package Version; 2016; Volume 2. Available online: https://ggplot2.tidyverse.org/reference/ggplot2-package.html (accessed on 15 November 2022).
- Edgetech. Discover Bathymetric: User Software Manual-0014878_REV_G. Date: 3/17/2022. 2022, p. 108. Available online: https://www.edgetech.com/wp-content/uploads/2019/07/0014878_Rev_H.pdf (accessed on 15 November 2022).
- Brisson, L.N.; Wolfe, D.A.; Matthew Staley, P.S.M. Interferometric Swath Bathymetry for Large Scale Shallow Water Hydrographic Surveys. In Canadian Hydrographic Conference; Canadian Hydrographic Association: St. John’s, NL, Canada, 2014; p. 18. Available online: https://www.edgetech.com/wp-content/uploads/2019/07/EdgeTech-Paper-on-6205-presented-at-CHC2014.pdf (accessed on 15 November 2022).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Images | Alt AGL (m) | GCPs | AA Points | |
|---|---|---|---|---|
| Site 1 | 197 | 31 | 8 | 3 |
| Site 2 | 255 | 45 | 5 | 5 |
| Date | Area (ha) | Points | Point Density (m3) | GSD | RMSEx | RMSEy | RMSEz | |
|---|---|---|---|---|---|---|---|---|
| Site 1 | 2 October 2020 | 1.39 | 10,087,712 | 7199 | 0.81 | 3.6 | 1.7 | 2.2 |
| Site 2 | 23 August 2020 | 9.78 | 17,651,328 | 677 | 1.83 | 2.9 | 1.7 | 1.2 |
| Object | Port | Starboard | Both Sides | ||
|---|---|---|---|---|---|
| Site 1 (Provincetown Harbor) | 550 kHz | 60 mm | 0.43 ± 0.26 (0.03–1.09) n = 47 | 0.44 ± 0.23 (0.04–0.87) n = 41 | 0.43 ± 0.24 (0.04–1.09) n = 88 |
| 81 mm | 0.45 ± 0.44 (0.09–2.38) n = 58 | 0.39 ± 0.28 (0.04–1.62) n = 45 | 0.43 ± 0.38 (0.04–2.38) n = 103 | ||
| 105 mm | 0.43 ± 0.27 (0.07–1.59) n = 82 | 0.48 ± 0.23 (0.07–1.21) n = 87 | 0.45 ± 0.25 (0.07–1.59) n = 169 | ||
| 155 mm | 0.52 ± 0.35 (0.05–1.7) n = 94 | 0.41 ± 0.24 (0.01–1.55) n = 124 | 0.46 ± 0.29 (0.01–1.7) n = 218 | ||
| 550 kHz | 0.46 ± 0.34 (0.03–2.38) n = 281 | 0.43 ± 0.24 (0.01–1.62) n = 297 | 0.45 ± 0.29 (0.01–2.38) n = 578 | ||
| 1600 kHz | 60 mm | 0.3 ± 0.28 (0.01–1.09) n = 75 | 0.39 ± 0.23 (0.04–1.01) n = 56 | 0.34 ± 0.26 (0.01–1.09) n = 131 | |
| 81 mm | 0.28 ± 0.19 (0.01–0.87) n = 82 | 0.36 ± 0.23 (0.02–0.9) n = 64 | 0.32 ± 0.21 (0.01–0.9) n = 146 | ||
| 105 mm | 0.33 ± 0.26 (0.02–1.37) n = 117 | 0.44 ± 0.24 (0.03–1) n = 140 | 0.39 ± 0.25 (0.02–1.37) n = 257 | ||
| 155 mm | 0.46 ± 0.33 (0.03–1.7) n = 152 | 0.41 ± 0.25 (0.02–1.29) n = 162 | 0.44 ± 0.29 (0.02–1.7) n = 314 | ||
| 1600 kHz | 0.36 ± 0.29 (0.01–1.7) n = 426 | 0.41 ± 0.24 (0.02–1.29) n = 422 | 0.39 ± 0.27 (0.01–1.7) n = 848 | ||
| TOTAL | 0.4 ± 0.31 (0.01–2.38) n = 707 | 0.42 ± 0.24 (0.01–1.62) n = 719 | 0.41 ± 0.28 (0.01–2.385) n = 1426 | ||
| Site 2 (Duck Harbor Beach) | 550 kHz | 60 mm | 0.65 ± 0.51 (0.24–1.29) n = 5 | 0.61 ± 0.2 (0.47–0.75) n = 2 | 0.64 ± 0.42 (0.24–1.291) n = 7 |
| 81 mm | 0.38 ± 0.18 (0.2–0.69) n = 5 | 0.61 ± - (0.61–0.61) n = 1 | 0.42 ± 0.19 (0.2–0.692) n = 6 | ||
| 105 mm | 0.4 ± 0.23 (0.1–0.7) n = 5 | 0.29 ± 0.25 (0.1–0.58) n = 3 | 0.36 ± 0.23 (0.1–0.696) n = 8 | ||
| 155 mm | 0.37 ± 0.25 (0.13–0.65) n = 5 | 0.27 ± 0.11 (0.14–0.39) n = 4 | 0.33 ± 0.2 (0.13–0.654) n = 9 | ||
| 550 kHz | 0.45 ± 0.32 (0.1–1.29) n = 20 | 0.38 ± 0.22 (0.1–0.75) n = 10 | 0.43 ± 0.29 (0.1–1.291) n = 30 | ||
| 1600 kHz | 60 mm | 0.45 ± 0.29 (0.16–1.02) n = 8 | 0.31 ± 0.17 (0.09–0.45) n = 4 | 0.41 ± 0.26 (0.09–1.021) n = 12 | |
| 81 mm | 0.43 ± 0.25 (0.17–0.99) n = 9 | 0.42 ± 0.17 (0.21–0.62) n = 5 | 0.42 ± 0.22 (0.17–0.989) n = 14 | ||
| 105 mm | 0.38 ± 0.19 (0.09–0.68) n = 9 | 0.41 ± 0.18 (0.18–0.73) n = 7 | 0.39 ± 0.18 (0.09–0.726) n = 16 | ||
| 155 mm | 0.47 ± 0.36 (0.14–1.26) n = 9 | 0.24 ± 0.18 (0.03–0.48) n = 7 | 0.37 ± 0.31 (0.03–1.263) n = 16 | ||
| 1600 kHz | 0.43 ± 0.27 (0.09–1.26) n = 35 | 0.34 ± 0.18 (0.03–0.73) n = 23 | 0.4 ± 0.24 (0.03–1.263) n = 58 | ||
| TOTAL | 0.44 ± 0.28 (0.09–1.29) n = 55 | 0.35 ± 0.19 (0.03–0.75) n = 33 | 0.41 ± 0.25 (0.03–1.291) n = 88 |
| 550 kHz | 1600 kHz | |||||
|---|---|---|---|---|---|---|
| Range (m) | Port | Starboard | Total | Port | Starboard | Total |
| 0 | - | 0.59 ± 0.19 (0.36–1.1) n = 12 | 0.59 ± 0.19 (0.36–1.1) n = 12 | 0.91 ± (0.91–0.91) n = 1 | 0.62 ± 0.2 (0.3–1) n = 13 | 0.64 ± 0.2 (0.3–1) n = 14 |
| 1 | 0.53 ± 0.23 (0.24–0.85) n = 8 | 0.3 ± 0.08 (0.24–0.36) n = 2 | 0.49 ± 0.23 (0.24–0.85) n = 10 | 0.54 ± 0.28 (0.28–1.01) n = 10 | 0.39 ± 0.1 (0.28–0.47) n = 3 | 0.51 ± 0.26 (0.28–1.01) n = 13 |
| 2 | 0.37 ± 0.19 (0.09–0.71) n = 9 | 0.36 ± 0.16 (0.05–0.6) n = 8 | 0.37 ± 0.17 (0.05–0.71) n = 17 | 0.49 ± 0.3 (0.16–1.23) n = 13 | 0.47 ± 0.26 (0.18–0.99) n = 10 | 0.48 ± 0.28 (0.16–1.23) n = 23 |
| 3 | 0.4 ± 0.2 (0.17–0.76) n = 15 | 0.15 ± 0.13 (0.04–0.43) n = 7 | 0.32 ± 0.22 (0.04–0.76) n = 22 | 0.48 ± 0.26 (0.12–1.04) n = 17 | 0.32 ± 0.29 (0.02–0.92) n = 15 | 0.41 ± 0.29 (0.02–1.04) n = 32 |
| 4 | 0.46 ± 0.38 (0.06–1.32) n = 20 | 0.27 ± 0.2 (0.04–0.87) n = 21 | 0.36 ± 0.31 (0.04–1.32) n = 41 | 0.41 ± 0.33 (0.03–1.37) n = 21 | 0.25 ± 0.21 (0.08–0.81) n = 19 | 0.34 ± 0.29 (0.03–1.37) n = 40 |
| 5 | 0.47 ± 0.27 (0.08–1.09) n = 21 | 0.25 ± 0.14 (0.03–0.62) n = 19 | 0.37 ± 0.24 (0.03–1.09) n = 40 | 0.44 ± 0.26 (0.01–1.08) n = 29 | 0.23 ± 0.18 (0.03–0.77) n = 29 | 0.33 ± 0.25 (0.01–1.08) n = 58 |
| 6 | 0.36 ± 0.23 (0.09–0.86) n = 12 | 0.3 ± 0.12 (0.12–0.64) n = 27 | 0.32 ± 0.16 (0.09–0.86) n = 39 | 0.37 ± 0.25 (0.06–1.03) n = 15 | 0.28 ± 0.2 (0.07–0.71) n = 34 | 0.31 ± 0.21 (0.06–1.03) n = 49 |
| 7 | 0.29 ± 0.2 (0.05–0.98) n = 29 | 0.32 ± 0.16 (0.01–0.66) n = 27 | 0.31 ± 0.18 (0.01–0.98) n = 56 | 0.34 ± 0.24 (0.01–1.04) n = 35 | 0.26 ± 0.18 (0.02–0.89) n = 41 | 0.29 ± 0.21 (0.01–1.04) n = 76 |
| 8 | 0.34 ± 0.26 (0.12–1.09) n = 18 | 0.39 ± 0.27 (0.11–1.21) n = 19 | 0.37 ± 0.26 (0.11–1.21) n = 37 | 0.37 ± 0.25 (0.06–1.08) n = 24 | 0.31 ± 0.14 (0.09–0.59) n = 22 | 0.34 ± 0.2 (0.06–1.08) n = 46 |
| 9 | 0.39 ± 0.28 (0.03–1.04) n = 17 | 0.42 ± 0.2 (0.13–0.76) n = 20 | 0.41 ± 0.24 (0.03–1.04) n = 37 | 0.34 ± 0.24 (0.03–0.91) n = 24 | 0.33 ± 0.18 (0.06–0.85) n = 32 | 0.33 ± 0.2 (0.03–0.91) n = 56 |
| 10 | 0.38 ± 0.39 (0.05–1.1) n = 9 | 0.37 ± 0.11 (0.21–0.54) n = 7 | 0.38 ± 0.29 (0.05–1.1) n = 16 | 0.38 ± 0.34 (0.03–1.35) n = 23 | 0.35 ± 0.16 (0.08–0.64) n = 15 | 0.37 ± 0.28 (0.03–1.35) n = 38 |
| 11 | 0.61 ± 0.39 (0.22–1.31) n = 7 | 0.44 ± 0.16 (0.17–0.71) n = 13 | 0.5 ± 0.27 (0.17–1.31) n = 20 | 0.39 ± 0.38 (0.07–1.23) n = 16 | 0.36 ± 0.18 (0.04–0.83) n = 28 | 0.37 ± 0.27 (0.04–1.23) n = 44 |
| 12 | 0.37 ± 0.34 (0.09–1.34) n = 11 | 0.39 ± 0.1 (0.18–0.49) n = 8 | 0.38 ± 0.26 (0.09–1.34) n = 19 | 0.4 ± 0.32 (0.04–1.37) n = 21 | 0.38 ± 0.1 (0.21–0.7) n = 21 | 0.39 ± 0.23 (0.04–1.37) n = 42 |
| 13 | 0.6 ± 0.48 (0.22–1.85) n = 10 | 0.59 ± 0.35 (0.1–1.62) n = 13 | 0.59 ± 0.4 (0.1–1.85) n = 23 | 0.35 ± 0.23 (0.06–0.87) n = 18 | 0.48 ± 0.18 (0.12–0.72) n = 14 | 0.41 ± 0.22 (0.06–0.87) n = 32 |
| 14 | 0.52 ± 0.33 (0.19–1.4) n = 15 | 0.57 ± 0.13 (0.34–0.71) n = 6 | 0.54 ± 0.28 (0.19–1.4) n = 21 | 0.3 ± 0.28 (0.06–1.32) n = 33 | 0.54 ± 0.14 (0.29–0.77) n = 15 | 0.38 ± 0.27 (0.06–1.32) n = 48 |
| 15 | 0.65 ± 0.49 (0.26–2.22) n = 16 | 0.54 ± 0.23 (0.04–0.95) n = 14 | 0.6 ± 0.39 (0.04–2.22) n = 30 | 0.27 ± 0.32 (0.02–1.41) n = 20 | 0.54 ± 0.23 (0.18–0.96) n = 23 | 0.42 ± 0.31 (0.02–1.41) n = 43 |
| 16 | 0.53 ± 0.3 (0.22–1.63) n = 19 | 0.55 ± 0.21 (0.16–1.01) n = 25 | 0.54 ± 0.25 (0.16–1.63) n = 44 | 0.29 ± 0.3 (0.06–1.58) n = 29 | 0.57 ± 0.15 (0.22–0.85) n = 30 | 0.43 ± 0.27 (0.06–1.58) n = 59 |
| 17 | 0.62 ± 0.46 (0.24–2.38) n = 24 | 0.55 ± 0.19 (0.13–0.89) n = 22 | 0.59 ± 0.36 (0.13–2.38) n = 46 | 0.29 ± 0.25 (0.02–1.19) n = 39 | 0.61 ± 0.19 (0.25–1.01) n = 30 | 0.43 ± 0.28 (0.02–1.19) n = 69 |
| 18 | 0.54 ± 0.34 (0.26–1.7) n = 14 | 0.53 ± 0.23 (0.18–0.94) n = 14 | 0.54 ± 0.29 (0.18–1.7) n = 28 | 0.36 ± 0.38 (0.04–1.7) n = 24 | 0.69 ± 0.21 (0.23–1.05) n = 18 | 0.5 ± 0.36 (0.04–1.7) n = 42 |
| 19 | 0.5 ± 0.15 (0.3–0.69) n = 6 | 0.57 ± 0.24 (0.23–0.87) n = 9 | 0.54 ± 0.2 (0.23–0.87) n = 15 | 0.29 ± 0.19 (0.11–0.8) n = 14 | 0.64 ± 0.33 (0.1–1.1) n = 6 | 0.39 ± 0.29 (0.1–1.1) n = 20 |
| 20 | 0.67 ± (0.67–0.67) n = 1 | 1.1 ± 0.31 (0.8–1.55) n = 4 | 1.02 ± 0.33 (0.67–1.55) n = 5 | 0.9 ± 0.39 (0.4–1.29) n = 4 | 0.9 ± 0.39 (0.4–1.29) n = 4 | |
| 550 | 0.46 ± 0.34 (0.03–2.38) n = 281 | 0.43 ± 0.24 (0.01–1.62) n = 297 | 0.45 ± 0.29 (0.01–2.38) n = 578 | 0.36 ± 0.29 (0.01–1.7) n = 426 | 0.41 ± 0.24 (0.02–1.29) n = 422 | 0.39 ± 0.27 (0.01–1.7) n = 848 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borrelli, M.; Legare, B.; McCormack, B.; dos Santos, P.P.G.M.; Solazzo, D. Absolute Localization of Targets Using a Phase-Measuring Sidescan Sonar in Very Shallow Waters. Remote Sens. 2023, 15, 1626. https://doi.org/10.3390/rs15061626
Borrelli M, Legare B, McCormack B, dos Santos PPGM, Solazzo D. Absolute Localization of Targets Using a Phase-Measuring Sidescan Sonar in Very Shallow Waters. Remote Sensing. 2023; 15(6):1626. https://doi.org/10.3390/rs15061626
Chicago/Turabian StyleBorrelli, Mark, Bryan Legare, Bryan McCormack, Pedro Paulo Guy Martins dos Santos, and Daniel Solazzo. 2023. "Absolute Localization of Targets Using a Phase-Measuring Sidescan Sonar in Very Shallow Waters" Remote Sensing 15, no. 6: 1626. https://doi.org/10.3390/rs15061626