
Rapid Assessment of Architectural Traits in Pear Rootstock Breeding Program Using Remote Sensing Techniques
 and
and
Abstract
:1. Introduction
2. Materials and Methods
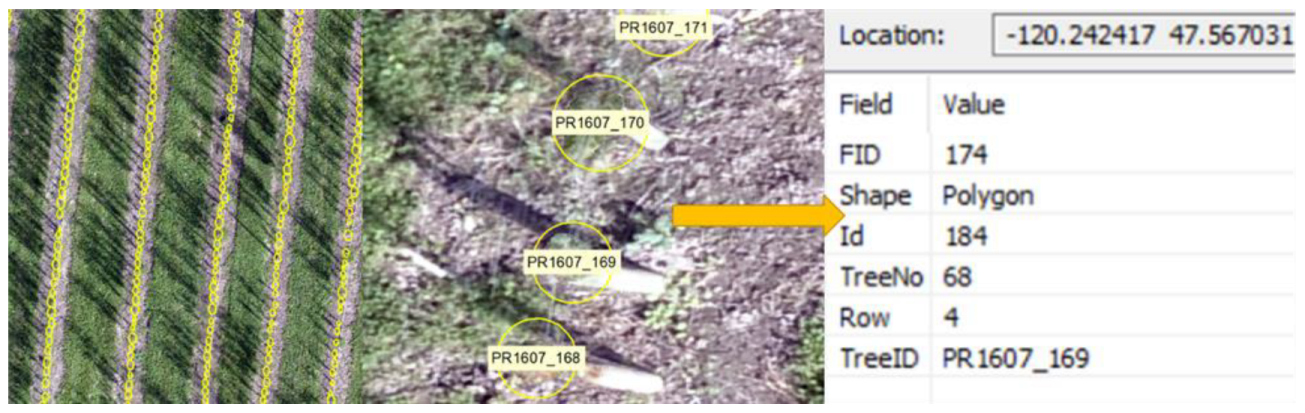
2.1. Study Area and Ground Reference Data
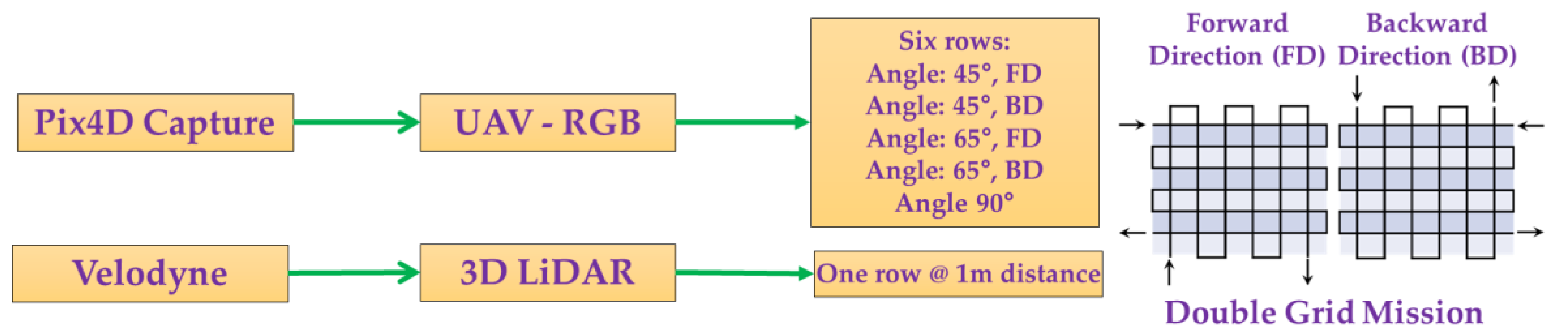
2.2. UAV and LiDAR Data Acquisition
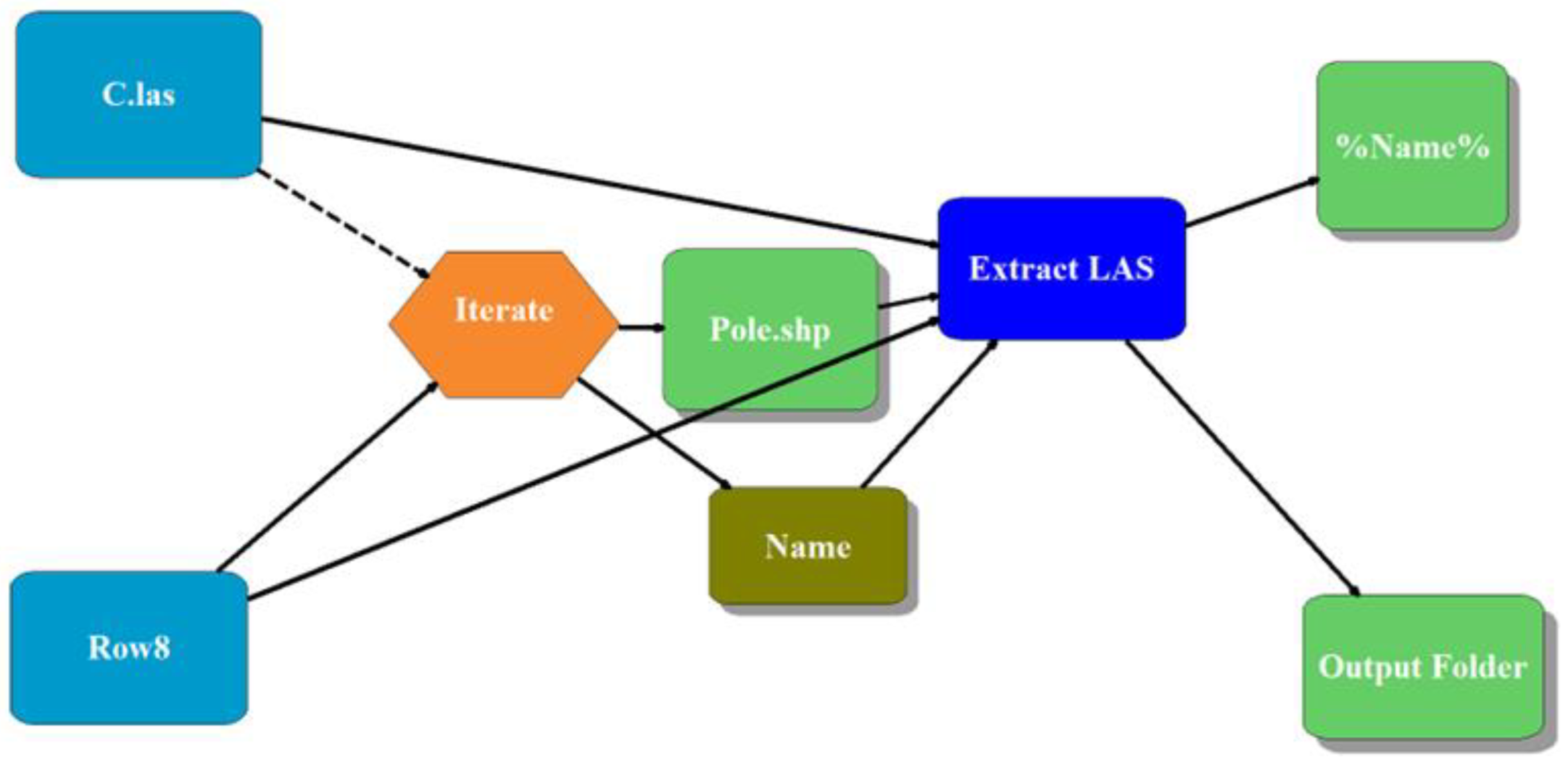
2.3. Preprocessing of the UAV-RGB and LiDAR Data
2.4. Extraction of Architectural Traits from UAV-RGB and LiDAR Data
2.5. Statistical Analysis
3. Results and Discussion
3.1. Ground Reference Data
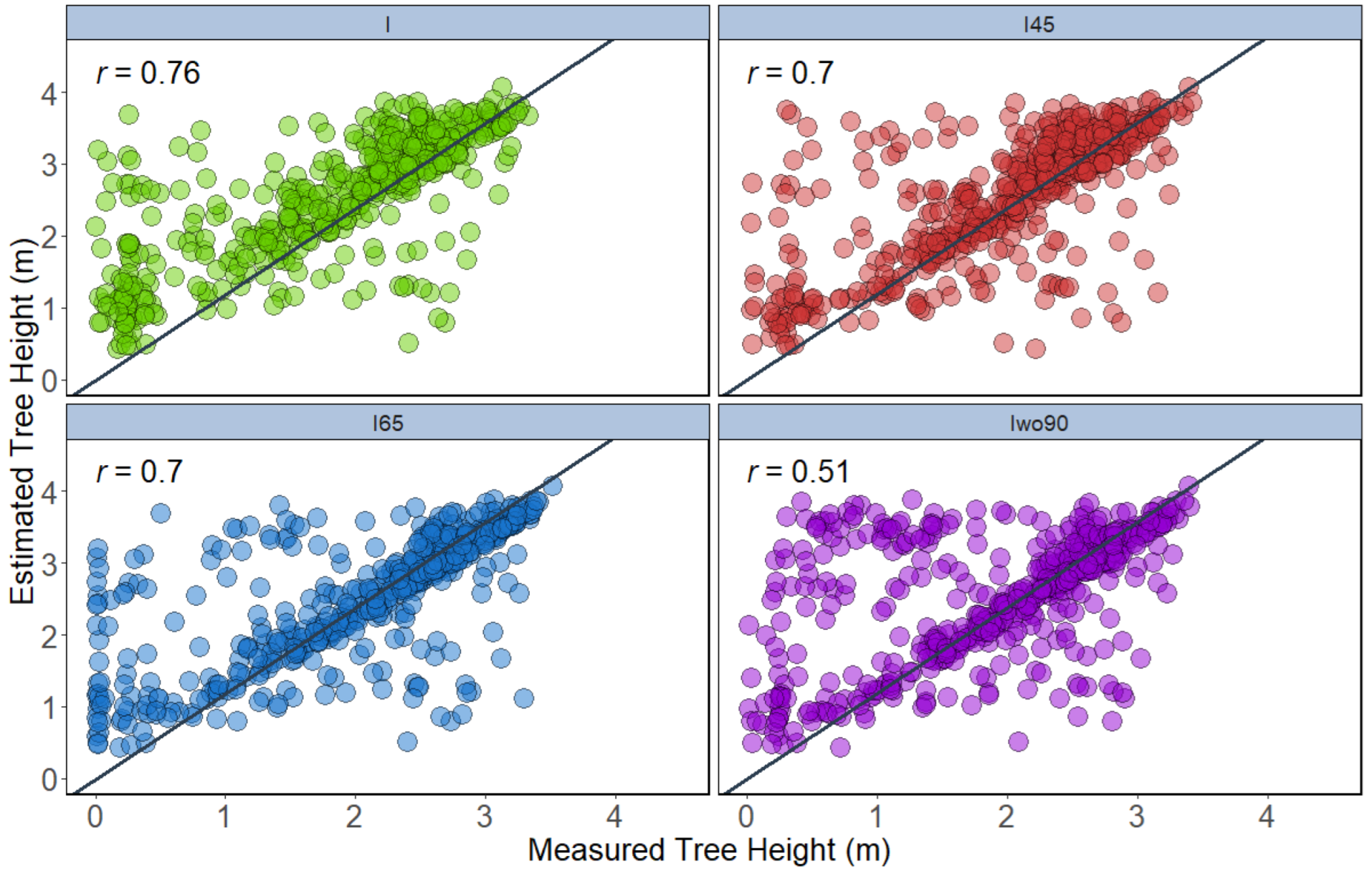
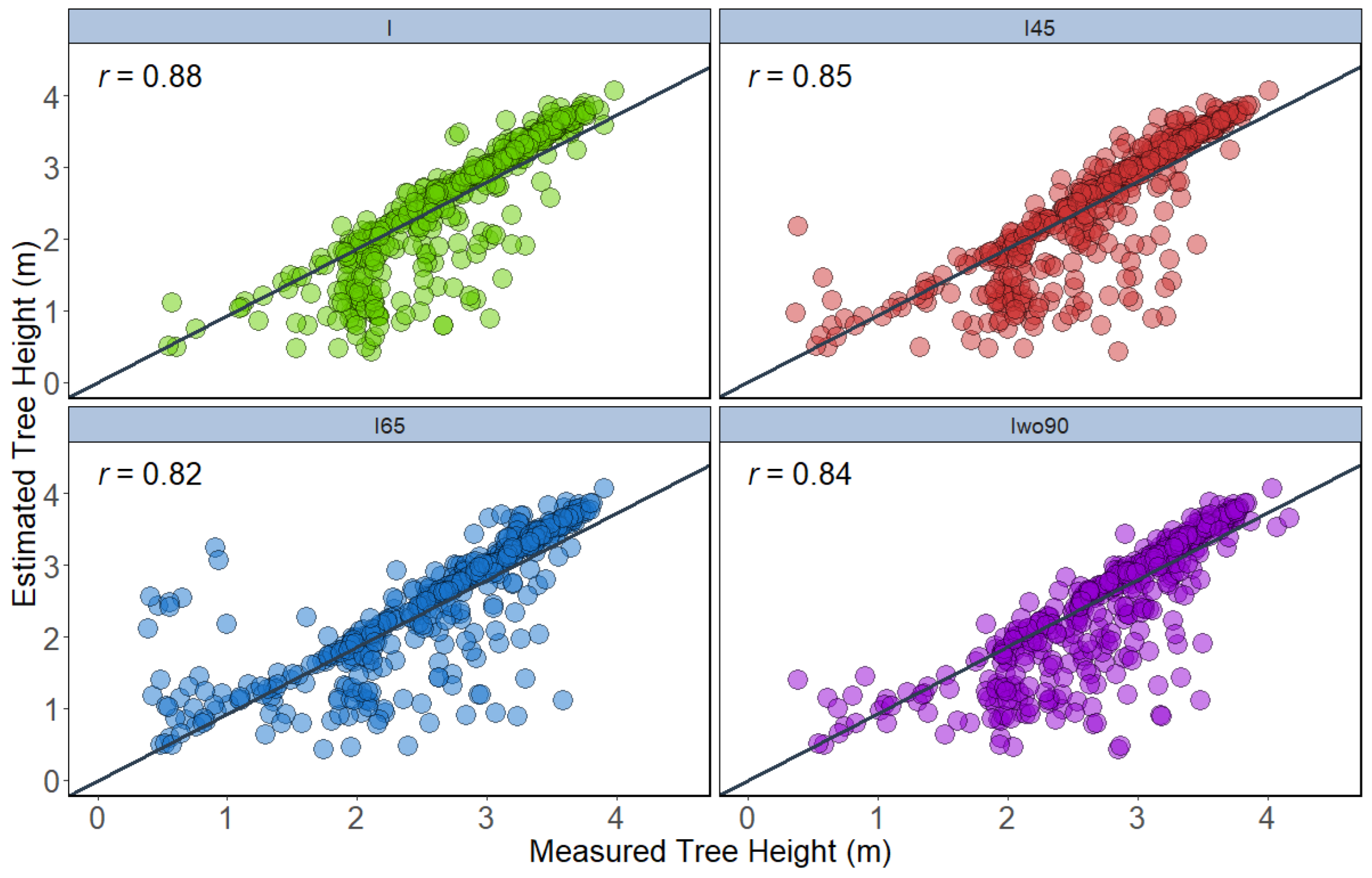
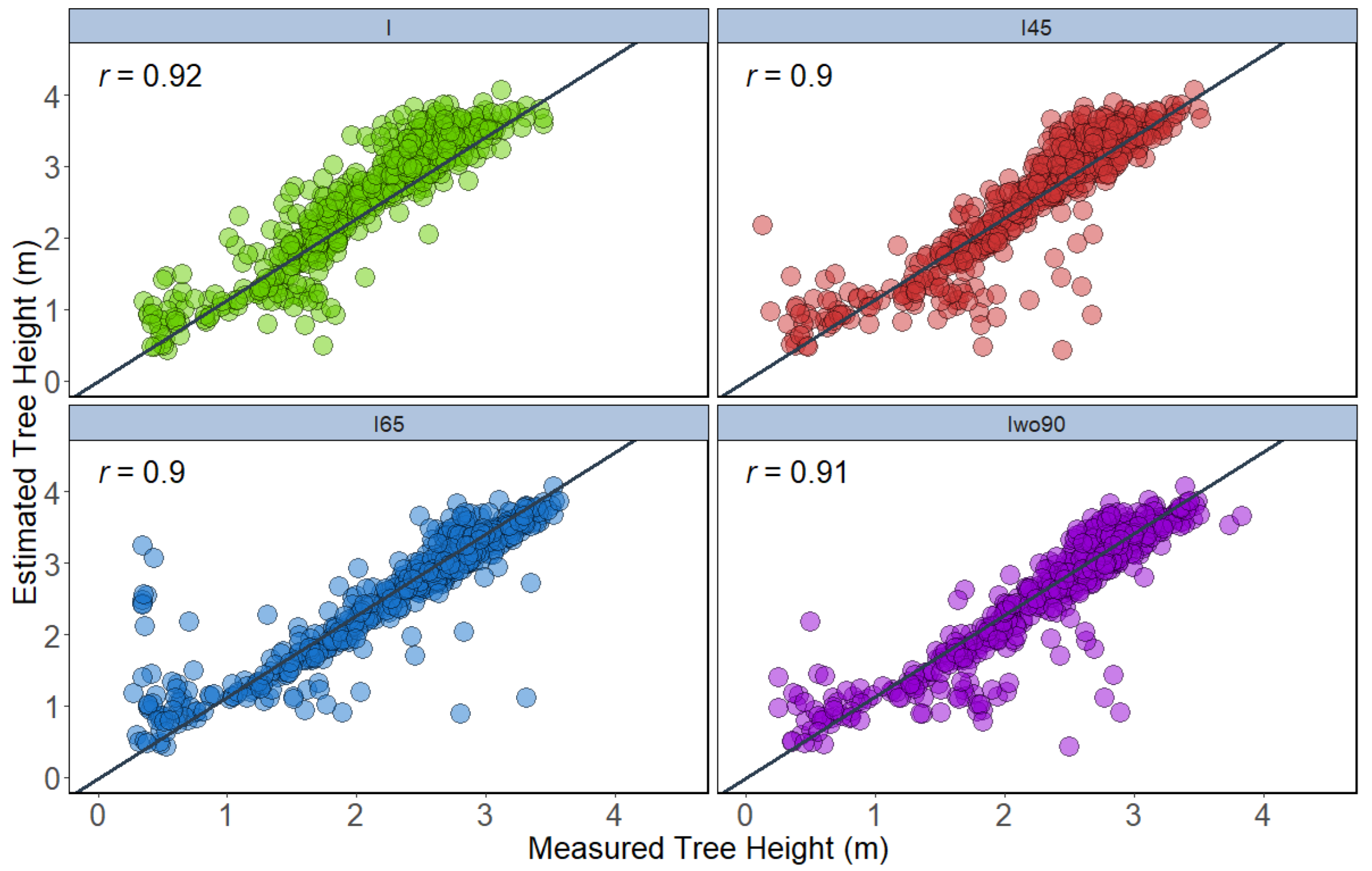
3.2. Tree Height Estimation Using UAV CHM and 3D Point Cloud Datasets
3.3. Comparison of Tree Height and Canopy Volume between UAV-RGB and LiDAR 3D Point Cloud Datasets
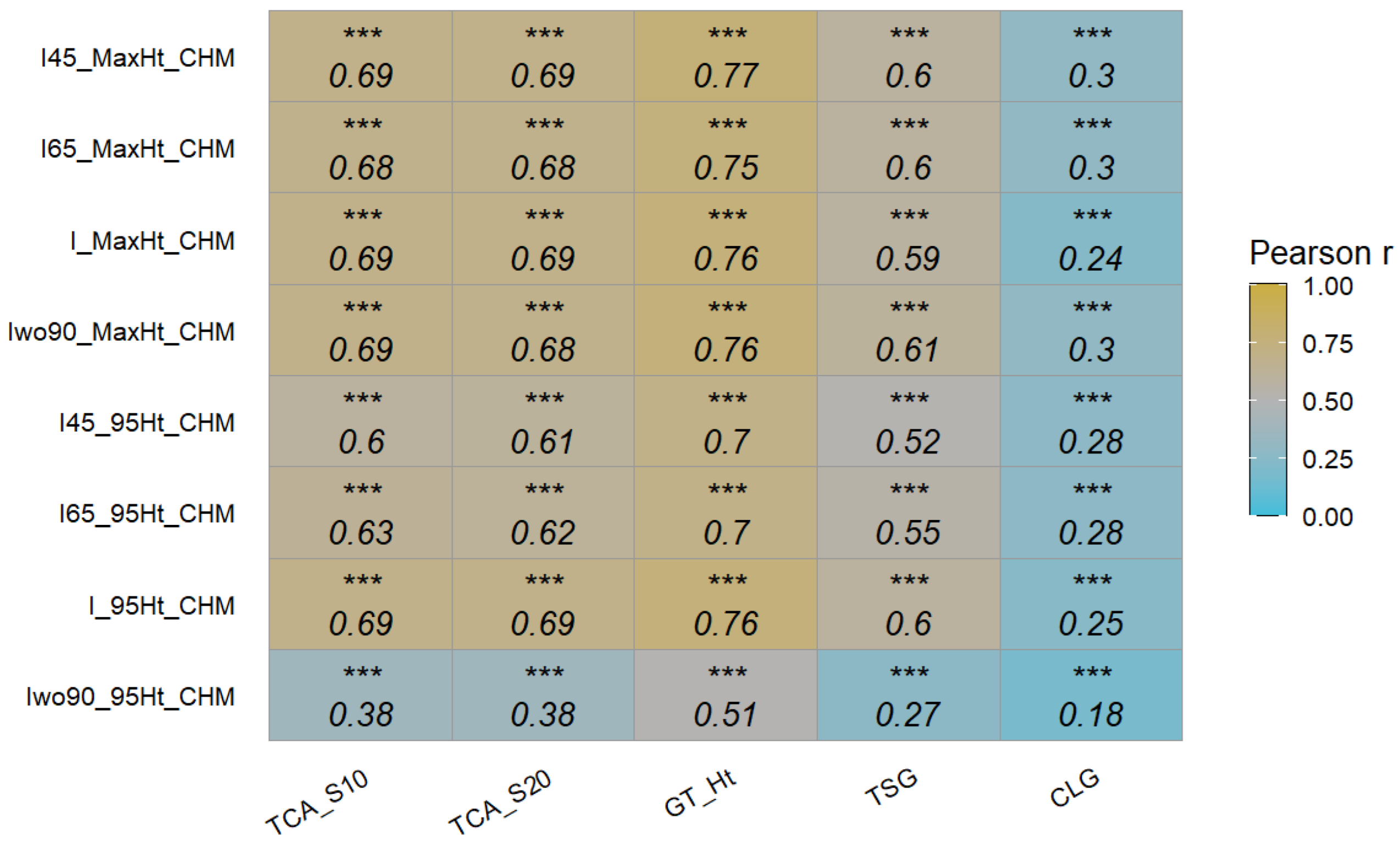
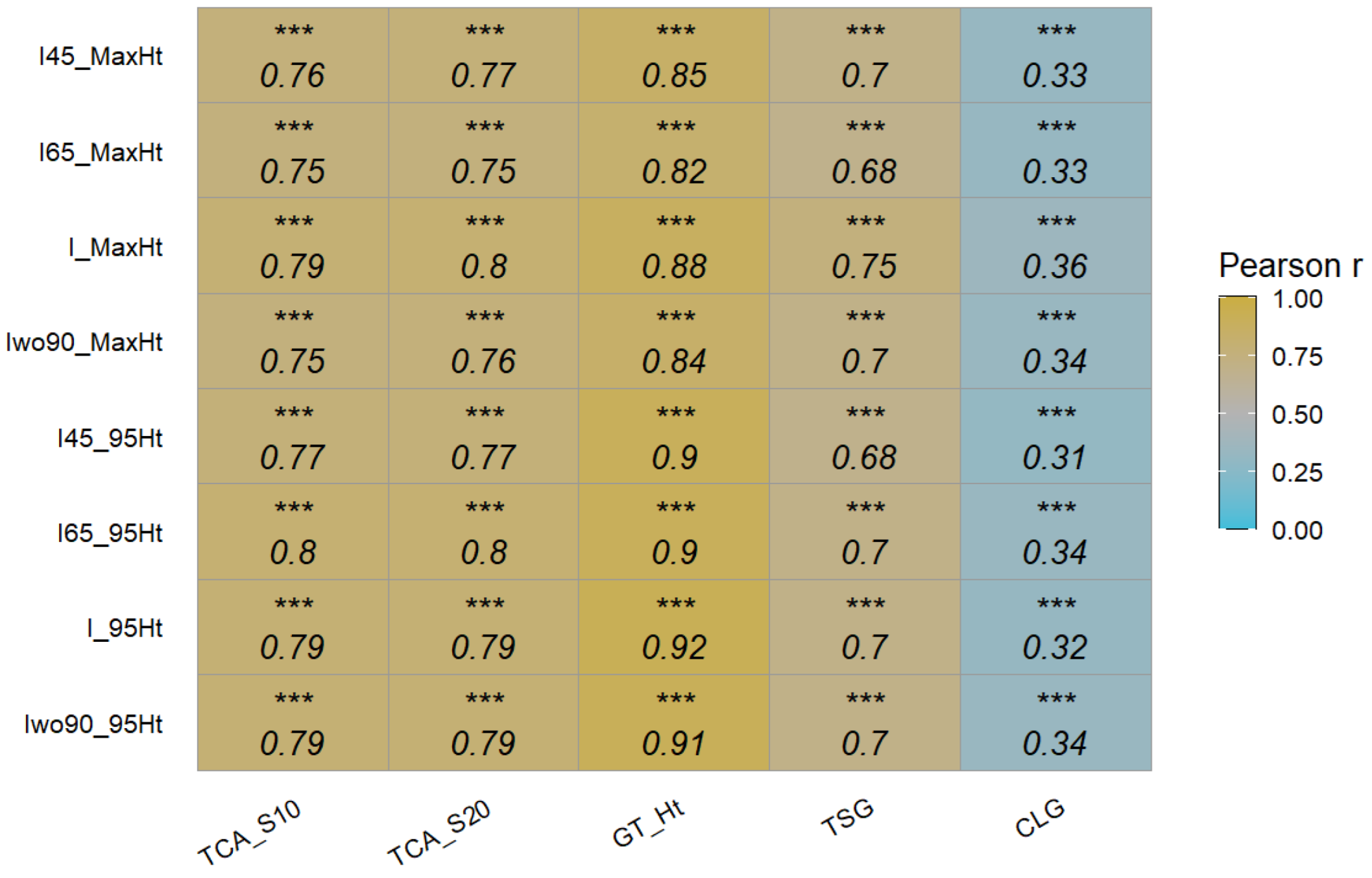
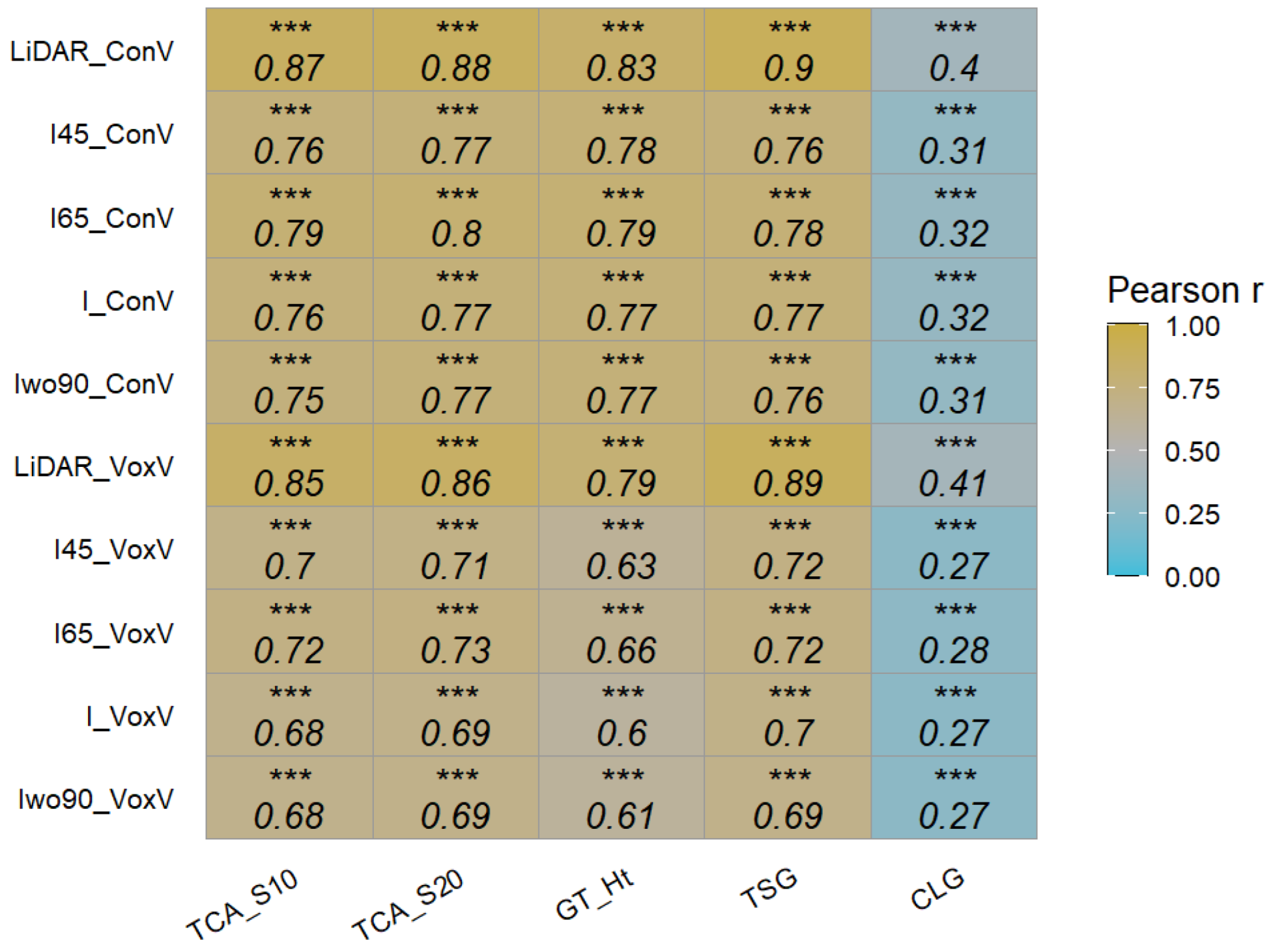
3.4. Comparison of Canopy Volume from UAV-RGB and LiDAR 3D Point Cloud Datasets with Other Traits
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Silva, G.J.; Souza, T.M.; Barbieri, R.L.; Costa de Oliveira, A. Origin, domestication, and dispersing of pear (Pyrus spp.). Adv. Agric. 2014, 2014, 541097. [Google Scholar]
- Seavert, C.F. Pear production in the North America. In IX International Pear Symposium 671; ISHS Acta Horticulturae: Stellenbosch, South Africa, 2004; pp. 45–46. [Google Scholar]
- National Agricultural Statistics Service (NASS): U.S. Department of Agriculture, 2021. Press Release. Available online: https://www.nass.usda.gov/Statistics_by_State/Washington/Publications/Current_News_Release/2021/FR08_01.pdf (accessed on 10 November 2022).
- Webster, A.D. Breeding and selection of apple and pear rootstocks. In Proceedings of the XXVI International Horticultural Congress: Genetics and Breeding of Tree Fruits and Nuts, Toronto, ON, Canada, 31 August 2003; pp. 499–512. [Google Scholar]
- Einhorn, T.C. A review of recent Pyrus, Cydonia and Amelanchier rootstock selections for high-density pear plantings. In Proceedings of the XIII International Pear Symposium 1303, Montevideo, Uruguay, 3–7 December 2018; pp. 185–196. [Google Scholar]
- Jayswal, D.K.; Lal, N. Rootstock and Scion Relationship in Fruit Crops. Editor. Board 2020, 2, AL202114. [Google Scholar]
- Elkins, R.B.; Bell, R.; Einhorn, T. Needs assessment for future US pear rootstock research directions based on the current state of pear production and rootstock research. J. Am. Pomol. Soc. 2012, 66, 153–163. [Google Scholar]
- Postman, J.D. World Pyrus collection at USDA genebank in Corvallis, Oregon. Acta Hortic. 2008, 800, 527–534. [Google Scholar] [CrossRef]
- Espiau Ramírez, M.T.; Alonso Segura, J.M. Agro-morphological diversity of local and international accessions of the Spanish Pear Germplasm Bank in Zaragoza. Acta Hortic. 2021, 1303, 71–78. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; de la Rosa, R.; León, L.; Jiménez-Brenes, F.M.; Kharrat, A.; López-Granados, F. Quantification of dwarfing effect of different rootstocks in ‘Picual’olive cultivar using UAV-photogrammetry. Precis. Agric. 2022, 23, 178–193. [Google Scholar] [CrossRef]
- Li, F.; Cohen, S.; Naor, A.; Shaozong, K.; Erez, A. Studies of canopy structure and water use of apple trees on three rootstocks. Agric. Water Manag. 2002, 55, 1–14. [Google Scholar] [CrossRef]
- Pereira, A.R.; Green, S.; Nova NA, V. Penman–Monteith reference evapotranspiration adapted to estimate irrigated tree transpiration. Agric. Water Manag. 2006, 83, 153–161. [Google Scholar] [CrossRef]
- Fazio, G.; Robinson, T. Modification of nursery tree architecture with apple rootstocks: A breeding perspective. N. Y. Fruit Q. 2008, 16, 13–16. [Google Scholar]
- Zhang, C.; Valente, J.; Kooistra, L.; Guo, L.; Wang, W. Orchard management with small unmanned aerial vehicles: A survey of sensing and analysis approaches. Precis. Agric. 2021, 22, 2007–2052. [Google Scholar] [CrossRef]
- Simon, S.; Lauri, P.E.; Brun, L.; Defrance, H.; Sauphanor, B. Does manipulation of fruit-tree architecture affect the development of pests and pathogens? A case study in an organic apple orchard. J. Hortic. Sci. Biotechnol. 2006, 81, 765–773. [Google Scholar] [CrossRef]
- Calonnec, A.; Burie, J.B.; Langlais, M.; Guyader, S.; Saint-Jean, S.; Sache, I.; Tivoli, B. Impacts of plant growth and architecture on pathogen processes and their consequences for epidemic behaviour. Eur. J. Plant Pathol. 2013, 135, 479–497. [Google Scholar] [CrossRef]
- Rallo, P.; de Castro, A.I.; López-Granados, F.; Morales-Sillero, A.; Torres-Sánchez, J.; Jiménez, M.R.; Jiménez-Brenes, F.M.; Casanova, L.; Suárez, M.P. Exploring UAV-imagery to support genotype selection in olive breeding programs. Sci. Hortic. 2020, 273, 109615. [Google Scholar] [CrossRef]
- Rosell, J.R.; Sanz, R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities. Comput. Electron. Agric. 2012, 81, 124–141. [Google Scholar] [CrossRef] [Green Version]
- Sangjan, W.; Sankaran, S. Phenotyping architecture traits of tree species using remote sensing techniques. Trans. ASABE 2021, 64, 1611–1624. [Google Scholar] [CrossRef]
- Guo, W.; Carroll, M.E.; Singh, A.; Swetnam, T.L.; Merchant, N.; Sarkar, S.; Singh, A.K.; Ganapathysubramanian, B. UAS-based plant phenotyping for research and breeding applications. Plant Phenomics 2021, 2021, 9840192. [Google Scholar] [CrossRef]
- Patrick, A.; Li, C. High throughput phenotyping of blueberry bush morphological traits using unmanned aerial systems. Remote Sens. 2017, 9, 1250. [Google Scholar] [CrossRef] [Green Version]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arno, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F.; et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef] [Green Version]
- Camarretta, N.A.; Harrison, P.; Lucieer, A.M.; Potts, B.; Davidson, N.; Hunt, M. From drones to phenotype: Using UAV-LiDAR to detect species and provenance variation in tree productivity and structure. Remote Sens. 2020, 12, 3184. [Google Scholar] [CrossRef]
- Raman, M.G.; Carlos, E.F.; Sankaran, S. Optimization and evaluation of sensor angles for precise assessment of architectural traits in peach trees. Sensors 2022, 22, 4619. [Google Scholar] [CrossRef]
- Kothawade, G.S.; Chandel, A.K.; Schrader, M.J.; Rathnayake, A.P.; Khot, L.R. High throughput canopy characterization of a commercial apple orchard using aerial RGB imagery. In 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor); IEEE: Trento-Bolzano, Italy, 2021; pp. 177–181. [Google Scholar]
- Ampatzidis, Y.; Partel, V.; Meyering, B.; Albrecht, U. Citrus rootstock evaluation utilizing UAV-based remote sensing and artificial intelligence. Comput. Electron. Agric. 2019, 164, 104900. [Google Scholar] [CrossRef]
- Csihon, Á.; Gonda, I.; Szabó, S.; Holb, I.J. Tree vegetative and generative properties and their inter-correlations for prospective apple cultivars under two training systems for young trees. Hortic. Environ. Biotechnol. 2022, 63, 325–339. [Google Scholar] [CrossRef]
- Sangjan, W.; McGee, R.J.; Sankaran, S. Optimization of UAV-based imaging and image processing orthomosaic and point cloud approaches for estimating biomass in a forage crop. Remote Sens. 2022, 14, 2396. [Google Scholar] [CrossRef]
- Kane, V.R.; Gersonde, R.F.; Lutz, J.A.; McGaughey, R.J.; Bakker, J.D.; Franklin, J.F. Patch dynamics and the development of structural and spatial heterogeneity in Pacific Northwest forests. Can. J. For. Res. 2011, 41, 2276–2291. [Google Scholar] [CrossRef] [Green Version]
- Dalla Corte, A.P.; Rex, F.E.; Almeida, D.R.A.d.; Sanquetta, C.R.; Silva, C.A.; Moura, M.M.; Wilkinson, B.; Zambrano, A.M.A.; Cunha Neto, E.M.d.; Veras, H.F.P.; et al. Measuring individual tree diameter and height using GatorEye High-Density UAV-Lidar in an integrated crop-livestock-forest system. Remote Sens. 2020, 12, 863. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Craine, W.A.; McGee, R.J.; Vandemark, G.J.; Davis, J.B.; Brown, J.; Sankaran, S. High-throughput phenotyping of canopy height in cool-season crops using sensing techniques. Agron. J. 2021, 113, 3269–3280. [Google Scholar] [CrossRef]
- Colaço, A.F.; Trevisan, R.G.; Molin, J.P.; Rosell-Polo, J.R. A method to obtain orange crop geometry information using a mobile terrestrial laser scanner and 3D modeling. Remote Sens. 2017, 9, 763. [Google Scholar] [CrossRef] [Green Version]
- Estornell, J.; Velázquez-Martí, A.; Fernández-Sarría, A.; López-Cortés, I.; Martí-Gavilá, J.; Salazar, D. Estimation of structural attributes of walnut trees based on terrestrial laser scanning. Rev. Teledetección 2017, 48, 67–76. [Google Scholar] [CrossRef]
- Wu, D.; Johansen, K.; Phinn, S.; Robson, A.; Tu, Y.H. Inter-comparison of remote sensing platforms for height estimation of mango and avocado tree crowns. Int. J. Appl. Earth Obs. Geoinf. 2020, 89, 102091. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Average GSD (cm) |
|---|---|
| Integration of 45° datasets (I45) | 0.82 |
| Integration of 65° datasets (I65) | 0.45 |
| Integration of all datasets (I) | 0.49 |
| Integration of all datasets excluding 90° dataset (Iwo90) | 0.53 |
| Features | TCA_S10 (sq. cm) | TCA_S20 (sq. cm) | GT_Ht (m) | TSG (m) | CLG (cm) |
|---|---|---|---|---|---|
| I45_MaxHt_PC | 1.67 | 1.60 | 0.46 | 5.66 | 32.68 |
| I65_MaxHt_PC | 1.71 | 1.65 | 0.50 | 5.87 | 32.69 |
| I_MaxHt_PC | 1.58 | 1.50 | 0.41 | 5.30 | 32.36 |
| Iwo90_MaxHt_PC | 1.70 | 1.63 | 0.47 | 5.71 | 32.66 |
| I45_95Ht_PC | 1.65 | 1.59 | 0.39 | 5.87 | 32.93 |
| I65_95Ht_PC | 1.56 | 1.51 | 0.39 | 5.72 | 32.63 |
| I_95Ht_PC | 1.58 | 1.51 | 0.35 | 5.73 | 32.83 |
| Iwo90_95Ht_PC | 1.58 | 1.52 | 0.36 | 5.70 | 32.63 |
| I45_MaxHt_CHM | 1.87 | 1.80 | 0.57 | 6.35 | 33.12 |
| I65_MaxHt_CHM | 1.88 | 1.82 | 0.59 | 6.35 | 33.04 |
| I_MaxHt_CHM | 1.86 | 1.80 | 0.58 | 6.41 | 33.68 |
| Iwo90_MaxHt_CHM | 1.87 | 1.81 | 0.57 | 6.35 | 33.09 |
| I45_95Ht_CHM | 2.05 | 1.97 | 0.63 | 6.81 | 33.29 |
| I65_95Ht_CHM | 2.00 | 1.94 | 0.63 | 6.66 | 33.23 |
| I_95Ht_CHM | 1.86 | 1.81 | 0.58 | 6.41 | 33.58 |
| Features | TCA_S10 (sq. cm) | TCA_S20 (sq. cm) | GT_Ht (m) | TSG (m) | CLG (cm) |
|---|---|---|---|---|---|
| L_ConV | 1.00 | 0.96 | 0.48 | 2.63 | 32.86 |
| I45_ConV | 1.68 | 1.58 | 0.56 | 5.14 | 32.92 |
| I65_ConV | 1.59 | 1.50 | 0.54 | 5.01 | 32.79 |
| I_ConV | 1.68 | 1.58 | 0.56 | 5.10 | 32.86 |
| Iwo90_ConV | 1.69 | 1.59 | 0.56 | 5.20 | 32.90 |
| L_VoxV | 1.08 | 1.05 | 0.53 | 2.67 | 32.76 |
| I45_VoxV | 1.84 | 1.58 | 0.69 | 5.55 | 33.34 |
| I65_VoxV | 1.79 | 1.50 | 0.66 | 5.51 | 33.23 |
| I_VoxV | 1.89 | 1.58 | 0.71 | 5.66 | 33.37 |
| Iwo90_VoxV | 1.88 | 1.59 | 0.70 | 5.75 | 33.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raman, M.G.; Marzougui, A.; Teh, S.L.; York, Z.B.; Evans, K.M.; Sankaran, S. Rapid Assessment of Architectural Traits in Pear Rootstock Breeding Program Using Remote Sensing Techniques. Remote Sens. 2023, 15, 1483. https://doi.org/10.3390/rs15061483
Raman MG, Marzougui A, Teh SL, York ZB, Evans KM, Sankaran S. Rapid Assessment of Architectural Traits in Pear Rootstock Breeding Program Using Remote Sensing Techniques. Remote Sensing. 2023; 15(6):1483. https://doi.org/10.3390/rs15061483
Chicago/Turabian StyleRaman, Mugilan Govindasamy, Afef Marzougui, Soon Li Teh, Zara B. York, Kate M. Evans, and Sindhuja Sankaran. 2023. "Rapid Assessment of Architectural Traits in Pear Rootstock Breeding Program Using Remote Sensing Techniques" Remote Sensing 15, no. 6: 1483. https://doi.org/10.3390/rs15061483