
A Channel Imbalance Calibration Scheme with Distributed Targets for Circular Quad-Polarization SAR with Reciprocal Crosstalk



Abstract
:
1. Introduction
2. Basis of CQP SAR PolCAL
2.1. Distortion Model
2.2. Priority Verification of Reflection Symmetry in CQP SAR Images
2.2.1. Verification of Reflection Symmetry Used in the k Calibration Methods of [20]
2.2.2. Division for Reflection Symmetry Verification
3. Materials and Methods
3.1. Assumptions of Natural Targets and CQP SAR System
3.1.1. Reciprocity of Natural Targets and Semireflection Symmetry of Volume-Dominated Targets
3.1.2. Antenna Reciprocity, No Azimuth Drifting, and Range Drifting
3.2. Distributed Targets Selection for PolCAL
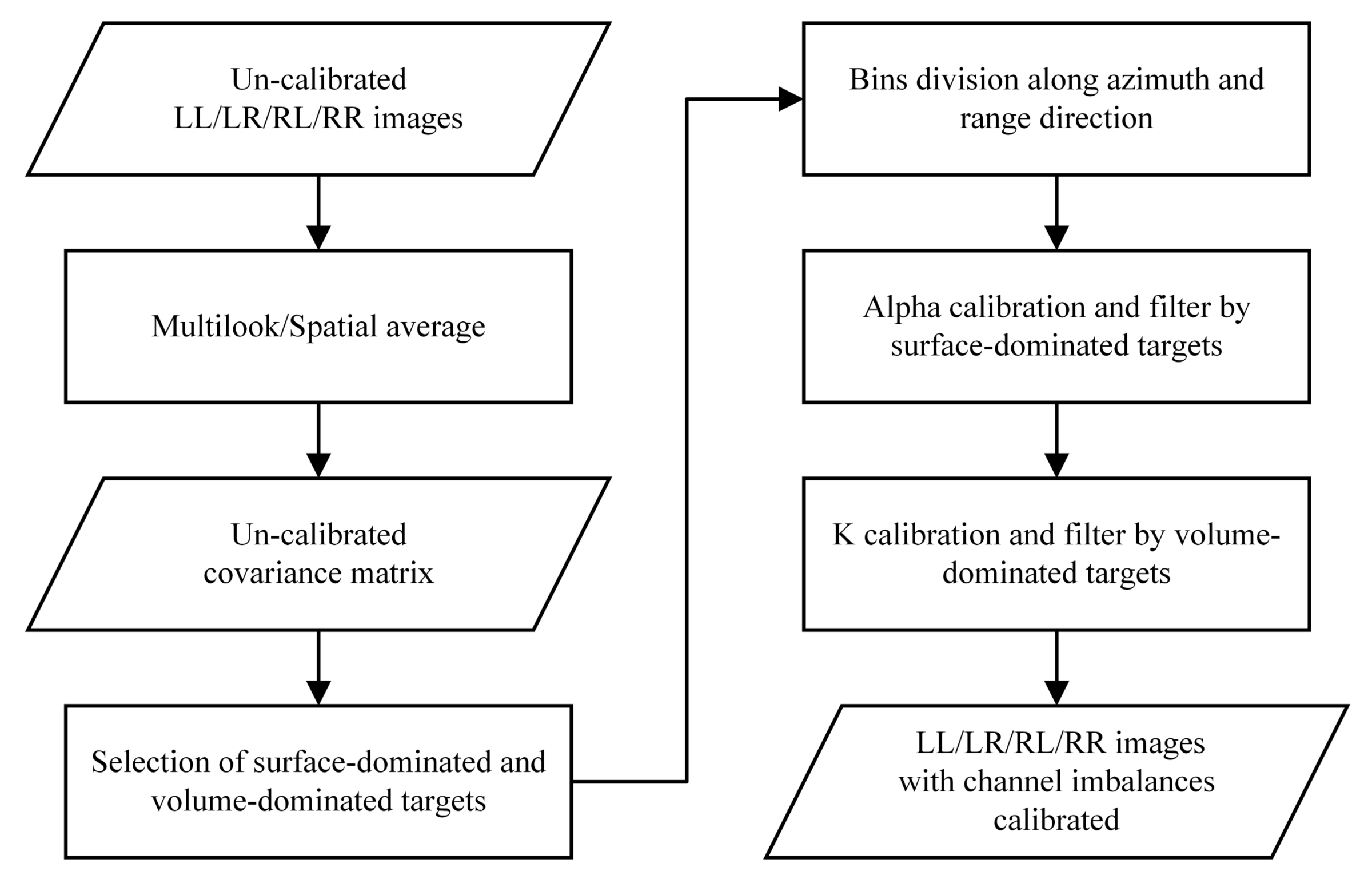
3.3. Channel Imbalances Calibration by Surface-Dominated and Volume-Dominated Targets
4. Experiments and Results
4.1. Channel Imbalances Calibration without Additionally Additive Noise
4.2. Channel Imbalances Calibration with Additionally Additive Noise
5. Discussion
5.1. Number of Range and Azimuth Bins
5.2. Choice of ENL Threshold
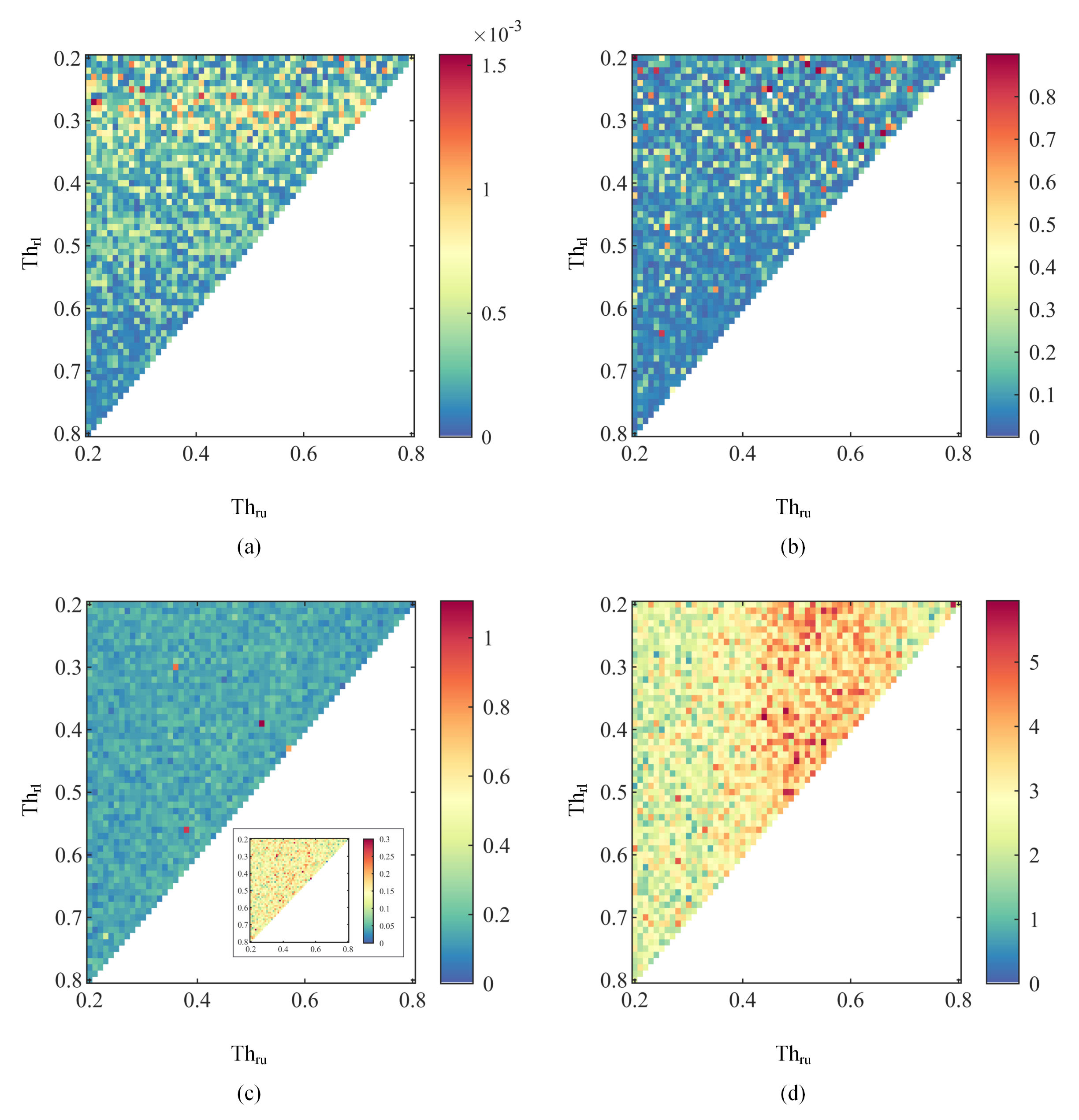
5.3. Choice of Threshold
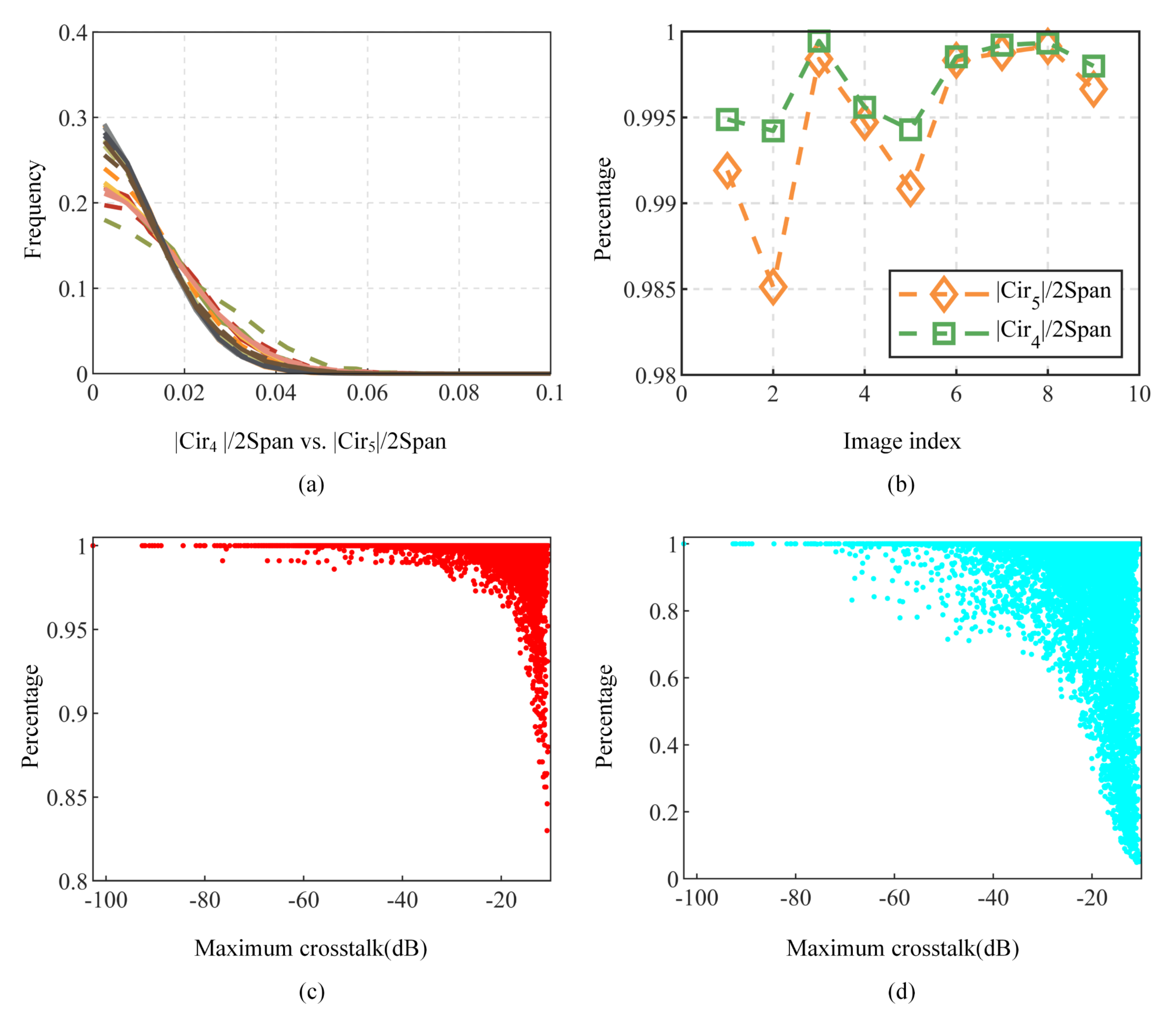
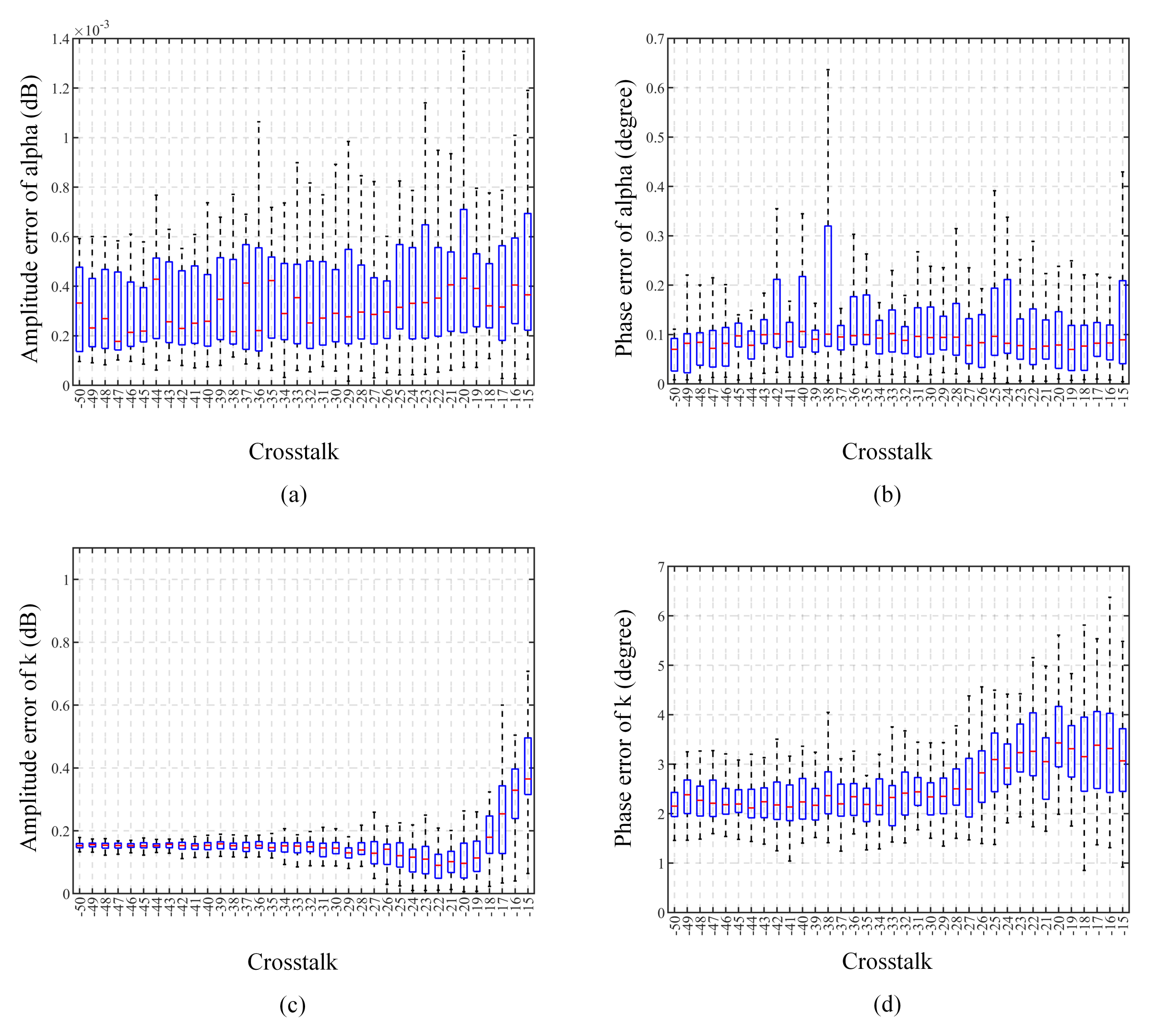
5.4. Crosstalk Effect on Channel Imbalance Estimation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, T.; Wang, W.; Yang, Z.; Yin, J.; Yang, J. Ship Detection From PolSAR Imagery Using the Hybrid Polarimetric Covariance Matrix. IEEE Geosci. Remote Sens. Lett. 2021, 18, 1575–1579. [Google Scholar] [CrossRef]
- Ainsworth, T.; Kelly, J.; Lee, J.S. Classification comparisons between dual-pol, compact polarimetric and quad-pol SAR imagery. ISPRS J. Photogramm. Remote Sens. 2009, 64, 464–471. [Google Scholar] [CrossRef]
- Duysak, H.; Yiğit, E. Investigation of the performance of different wavelet-based fusions of SAR and optical images using Sentinel-1 and Sentinel-2 datasets. Int. J. Eng. Geosci. 2022, 7, 81–90. [Google Scholar] [CrossRef]
- Inderkumar, K.; Maurya, H.; Kumar, A.; Bhiravarasu, S.S.; Das, A.; Putrevu, D.; Pandey, D.K.; Panigrahi, R.K. Retrieval of lunar surface dielectric constant using Chandrayaan-2 full-polarimetric SAR data. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–12. [Google Scholar] [CrossRef]
- Ni, J.; López-Martínez, C.; Hu, Z.; Zhang, F. Multitemporal SAR and Polarimetric SAR Optimization and Classification: Reinterpreting Temporal Coherence. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Park, S.E.; Jung, Y.T.; Kim, H.C. Monitoring permafrost changes in central Yakutia using optical and polarimetric SAR data. Remote. Sens. Environ. 2022, 274, 112989. [Google Scholar] [CrossRef]
- Wang, H.; Yang, J.; Lin, M.; Li, W.; Zhu, J.; Ren, L.; Cui, L. Quad-polarimetric SAR sea state retrieval algorithm from Chinese Gaofen-3 wave mode imagettes via deep learning. Remote. Sens. Environ. 2022, 273, 112969. [Google Scholar] [CrossRef]
- Freeman, A.; Shen, Y.; Werner, C.L. Polarimetric SAR calibration experiment using active radar calibrators. IEEE Trans. Geosci. Remote. Sens. 1990, 28, 224–240. [Google Scholar] [CrossRef]
- Ainsworth, T.L.; Ferro-Famil, L.; Lee, J.S. Orientation angle preserving a posteriori polarimetric SAR calibration. IEEE Trans. Geosci. Remote. Sens. 2006, 44, 994–1003. [Google Scholar] [CrossRef]
- Freeman, A.; Van Zyl, J.J.; Klein, J.D.; Zebker, H.A.; Shen, Y. Calibration of Stokes and scattering matrix format polarimetric SAR data. IEEE Trans. Geosci. Remote. Sens. 1992, 30, 531–539. [Google Scholar] [CrossRef]
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote. Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Quegan, S. A unified algorithm for phase and cross-talk calibration of polarimetric data-theory and observations. IEEE Trans. Geosci. Remote. Sens. 1994, 32, 89–99. [Google Scholar] [CrossRef]
- Han, Y.; Liu, X.; Hou, W.; Gao, Y.; Wang, R.; Fan, H.; Liu, D.; Zhao, F. A Distributed Target-Based Calibration Method for Hybrid Quadrature-Polarimetric SAR. In Proceedings of the IGARSS 2022-2022 IEEE International Geoscience and Remote Sensing Symposium, Kuala Lumpur, Malaysia, 17–22 July 2022; pp. 2538–2541. [Google Scholar] [CrossRef]
- Kimura, H.; Mizuno, T.; Papathanassiou, K.P.; Hajnsek, I. Improvement of polarimetric SAR calibration based on the Quegan algorithm. In Proceedings of the IGARSS 2004. 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 1. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, W.; Zhang, B.; Chen, J.; Wang, C. Improvement of polarimetric SAR calibration based on the Ainsworth algorithm for Chinese airborne PolSAR data. IEEE Geosci. Remote. Sens. Lett. 2013, 10, 898–902. [Google Scholar] [CrossRef]
- Azcueta, M.; d’Alessandro, M.M.; Zajc, T.; Grunfeld, N.; Thibeault, M. ALOS-2 preliminary calibration assessment. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July2015; pp. 4117–4120. [Google Scholar] [CrossRef]
- Shangguan, S.; Qiu, X.; Fu, K.; Lei, B.; Hong, W. GF-3 polarimetric data quality assessment based on automatic extraction of distributed targets. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2020, 13, 4282–4294. [Google Scholar] [CrossRef]
- Touzi, R.; Hawkins, R.K.; Cote, S. High-precision assessment and calibration of polarimetric RADARSAT-2 SAR using transponder measurements. IEEE Trans. Geosci. Remote. Sens. 2012, 51, 487–503. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: New York, NY, USA, 2017. [Google Scholar]
- Pincus, P.; Preiss, M.; Goh, A.S.; Gray, D. Polarimetric calibration of circularly polarized synthetic aperture radar data. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 6824–6839. [Google Scholar] [CrossRef]
- Cloude, S.R.; Ossikovski, R.; Garcia-Caurel, E. Bright singularities: Polarimetric calibration of spaceborne PolSAR systems. IEEE Geosci. Remote. Sens. Lett. 2020, 18, 476–479. [Google Scholar] [CrossRef]
- Shi, L.; Yang, J.; Li, P. Co-polarization channel imbalance determination by the use of bare soil. ISPRS J. Photogramm. Remote. Sens. 2014, 95, 53–67. [Google Scholar] [CrossRef]
- Van Zyl, J.J. Calibration of polarimetric radar images using only image parameters and trihedral corner reflector responses. IEEE Trans. Geosci. Remote. Sens. 1990, 28, 337–348. [Google Scholar] [CrossRef]
- Shi, L.; Li, P.; Yang, J.; Zhang, L.; Ding, X.; Zhao, L. Polarimetric SAR calibration and residual error estimation when corner reflectors are unavailable. IEEE Trans. Geosci. Remote. Sens. 2020, 58, 4454–4471. [Google Scholar] [CrossRef]
- Dey, S.; Bhattacharya, A.; Frery, A.C.; López-Martínez, C.; Rao, Y.S. A model-free four component scattering power decomposition for polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2021, 14, 3887–3902. [Google Scholar] [CrossRef]
- Sun, G.; Li, Z.; Huang, L.; Chen, Q.; Zhang, P. Quality analysis and improvement of polarimetric synthetic aperture radar (SAR) images from the GaoFen-3 satellite using the Amazon rainforest as an example. Int. J. Remote. Sens. 2021, 42, 2131–2154. [Google Scholar] [CrossRef]
- Huynen, J.R. Phenomenological Theory of Radar Targets. Ph.D. Thesis, Technical University, Delft, The Netherlands, 1970. [Google Scholar]
- LÜNEBURG, E. Principles of radar polarimetry. Ieice Trans. Electron. 1995, 78, 1339–1345. [Google Scholar]
- Lim, Y.X.; Burgin, M.S.; van Zyl, J.J. An optimal nonnegative eigenvalue decomposition for the Freeman and Durden three-component scattering model. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 2167–2176. [Google Scholar] [CrossRef]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote. Sens. 1998, 36, 963–973. [Google Scholar] [CrossRef] [Green Version]
- Aubry, A.; Carotenuto, V.; De Maio, A.; Pallotta, L. Assessing reciprocity in polarimetric SAR data. IEEE Geosci. Remote. Sens. Lett. 2019, 17, 87–91. [Google Scholar] [CrossRef]
- Fore, A.G.; Chapman, B.D.; Hawkins, B.P.; Hensley, S.; Jones, C.E.; Michel, T.R.; Muellerschoen, R.J. UAVSAR polarimetric calibration. IEEE Trans. Geosci. Remote. Sens. 2015, 53, 3481–3491. [Google Scholar] [CrossRef]
- Shi, L.; Li, P.; Yang, J.; Zhang, L.; Ding, X.; Zhao, L. Co-polarization channel imbalance phase estimation by corner-reflector-like targets. ISPRS J. Photogramm. Remote. Sens. 2019, 147, 255–266. [Google Scholar] [CrossRef]
- Shi, L.; Li, P.; Yang, J.; Sun, H.; Zhao, L.; Zhang, L. Polarimetric calibration for the distributed Gaofen-3 product by an improved unitary zero helix framework. ISPRS J. Photogramm. Remote. Sens. 2020, 160, 229–243. [Google Scholar] [CrossRef]
- Chang, Y.; Li, P.; Yang, J.; Zhao, J.; Zhao, L.; Shi, L. Polarimetric calibration and quality assessment of the GF-3 satellite images. Sensors 2018, 18, 403. [Google Scholar] [CrossRef] [Green Version]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric SAR. IEEE Trans. Geosci. Remote. Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characters | Value |
|---|---|
| Center Frequency (GHz) | 1.26 |
| Bandwidth (MHz) | 200 |
| Pulse Repeat Frequency (Hz) | 1805 |
| Flight Hight (m) | 4645.64 |
| Platform Velocity (m/s) | 84.93 |
| Incidence Angle (Degree) | 55 |
| CR Types | ID | Longitude (Degree) | Latitude (Degree) | Size (m) |
|---|---|---|---|---|
| Trihedral CR | TR.1 | 116.869611E | 42.139556N | 1 |
| TR.2 | 116.870528E | 42.140233N | 1 | |
| TR.3 | 116.872422E | 42.138997N | 1 | |
| TR.4 | 116.873844E | 42.138783N | 1 | |
| TR.5 | 116.874867E | 42.139358N | 1 | |
| 0 Dihedral CR | DR.1 | 116.871078E | 42.139272N | 1 |
| DR.2 | 116.873450E | 42.139661N | 1 | |
| 22.5 Dihedral CR | 225DR.1 | 116.872117E | 42.140114N | 1 |
| Original | Proposed Scheme | Control Group | ||||
|---|---|---|---|---|---|---|
| DR.1 | 0.923 | 172.029 | 0.902 | 174.946 | 0.890 | −168.993 (191.007) |
| DR.2 | 0.932 | 172.224 | 0.933 | 174.576 | 0.917 | −160.542 (199.458) |
| 225DR.1 | 0.911 | 90.195 | 0.882 | 92.696 | 0.869 | 120.089 |
| Mean error by (31) | - | 0.164 | 2.590 | 0.292 | 25.369 | |
| Original | Proposed Scheme | Control Group | ||||
|---|---|---|---|---|---|---|
| DR.1 | 0.923 | 172.029 | 0.943 | 178.953 | 0.955 | −164.271 (195.727) |
| DR.2 | 0.932 | 172.224 | 0.983 | 178.351 | 1.000 | −158.684 (201.316) |
| 225DR.1 | 0.911 | 90.195 | 0.999 | 93.755 | 1.014 | 119.529 |
| Mean error by (31) | - | 0.614 | 4.154 | 0.927 | 23.893 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Deng, Y.; Zhang, H.; Liu, X. A Channel Imbalance Calibration Scheme with Distributed Targets for Circular Quad-Polarization SAR with Reciprocal Crosstalk. Remote Sens. 2023, 15, 1365. https://doi.org/10.3390/rs15051365
Zhao X, Deng Y, Zhang H, Liu X. A Channel Imbalance Calibration Scheme with Distributed Targets for Circular Quad-Polarization SAR with Reciprocal Crosstalk. Remote Sensing. 2023; 15(5):1365. https://doi.org/10.3390/rs15051365
Chicago/Turabian StyleZhao, Xingjie, Yunkai Deng, Heng Zhang, and Xiuqing Liu. 2023. "A Channel Imbalance Calibration Scheme with Distributed Targets for Circular Quad-Polarization SAR with Reciprocal Crosstalk" Remote Sensing 15, no. 5: 1365. https://doi.org/10.3390/rs15051365