

Fast Resolution Enhancement for Real Beam Mapping Using the Parallel Iterative Deconvolution Method

Abstract
:
1. Introduction
2. Echo Model
2.1. Continuous Signal Model
2.2. Discrete Signal Model
3. Improved Poisson Distribution-Based Maximum Likelihood Super-Resolution Imaging Algorithm
3.1. Poisson Distribution-Based Maximum Likelihood Super-Resolution Imaging Algorithm
3.2. Adaptive Selection of Iteration Factor
4. Simulation and Real Data Processing Results
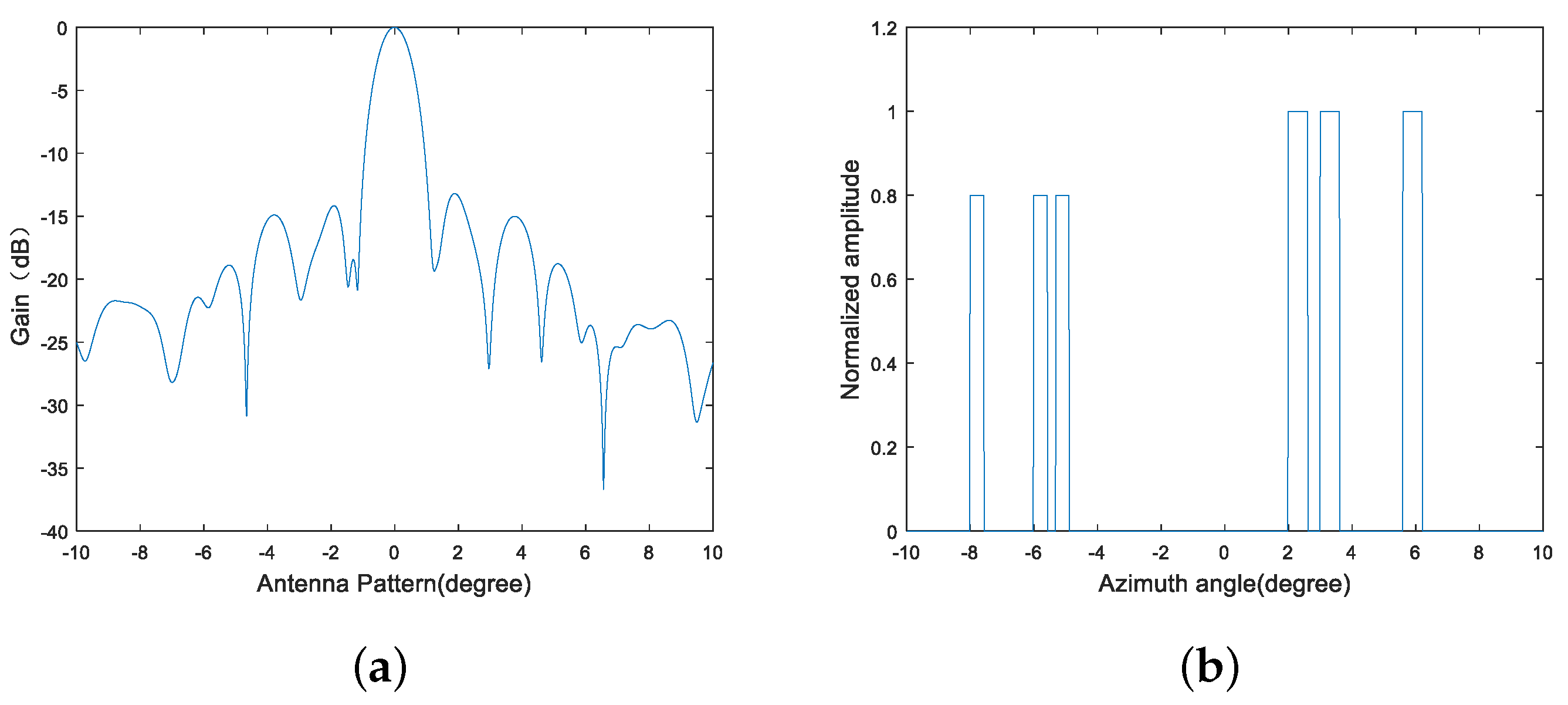
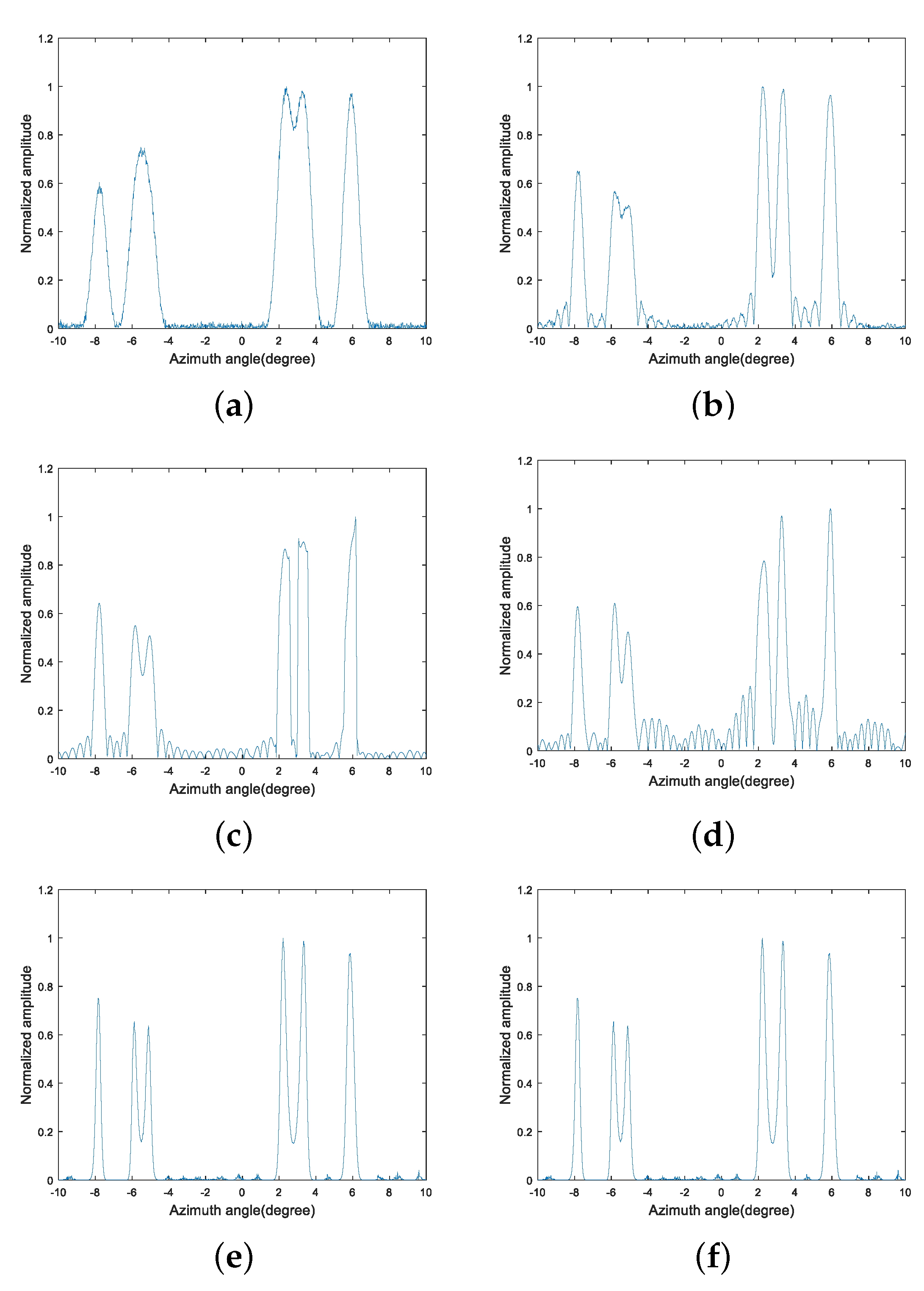
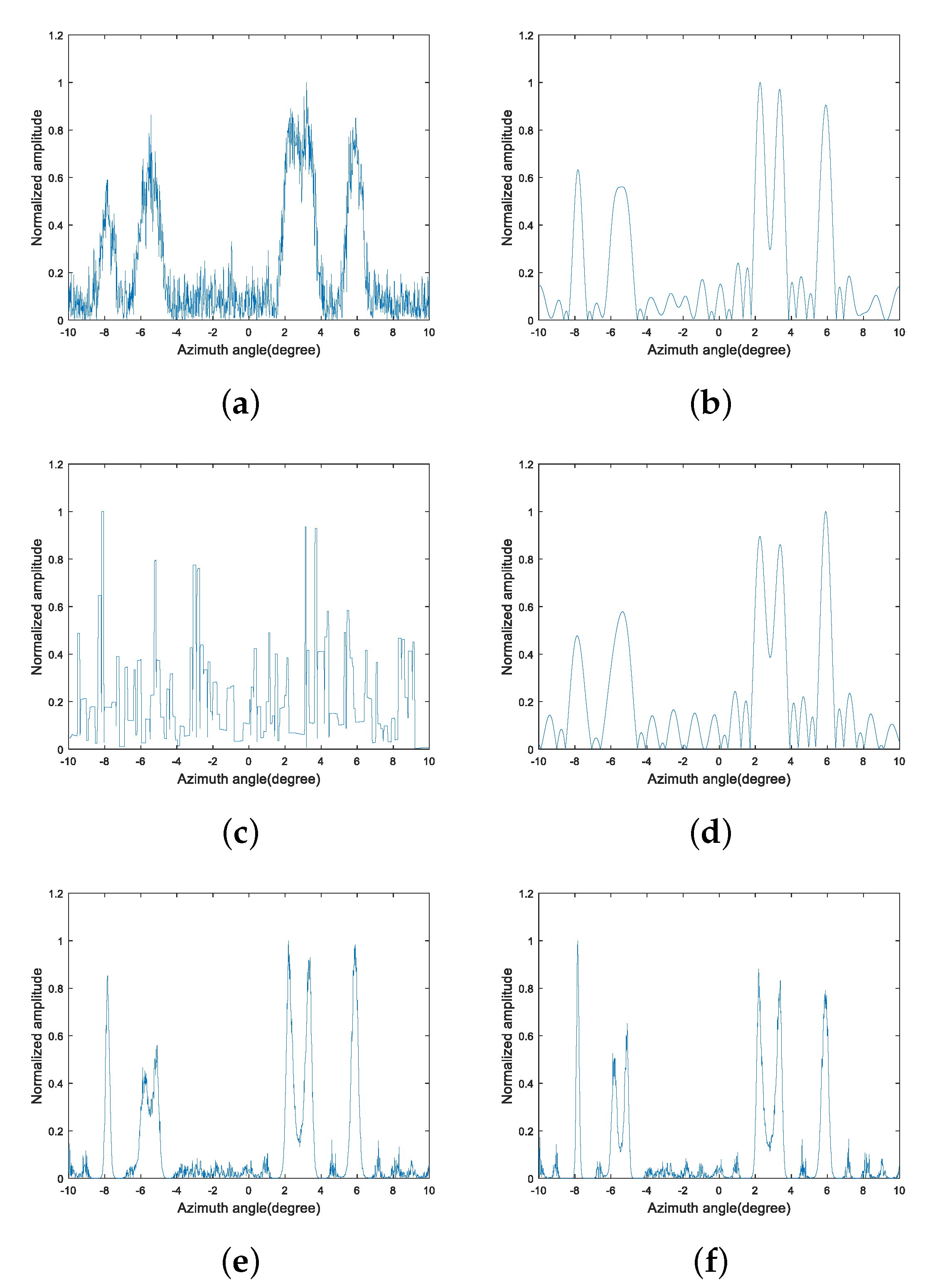
4.1. Point Target Simulation
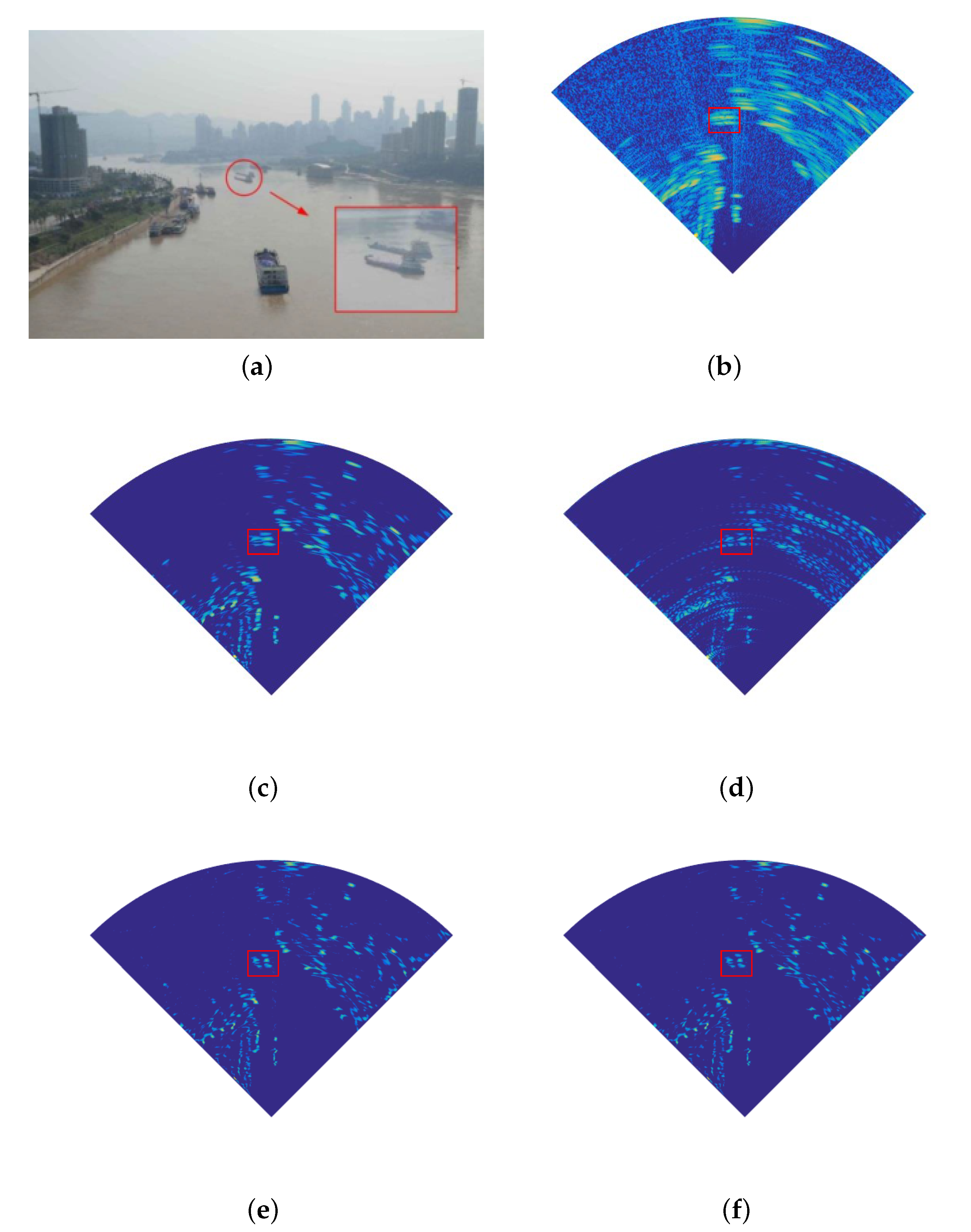
4.2. Real Data Processing
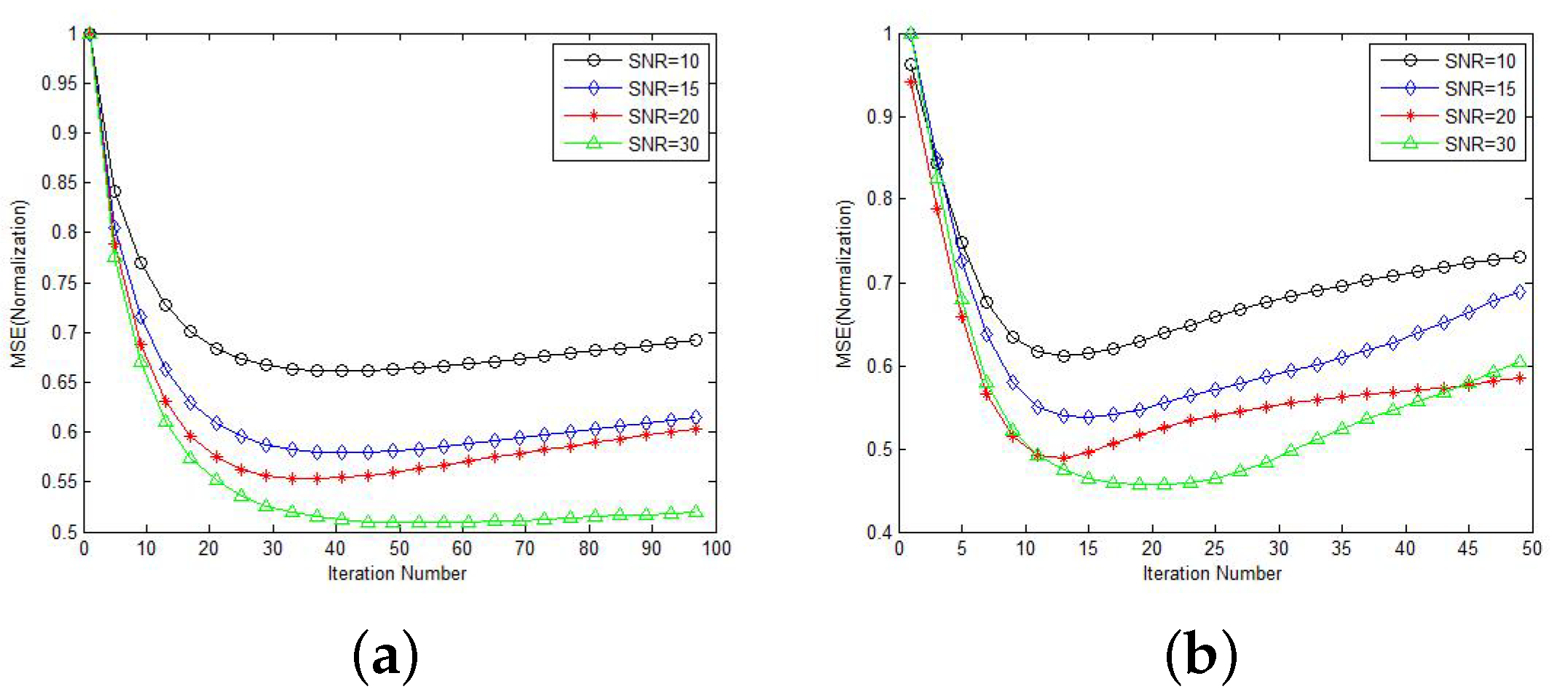
4.3. Error and Speedup Analysis
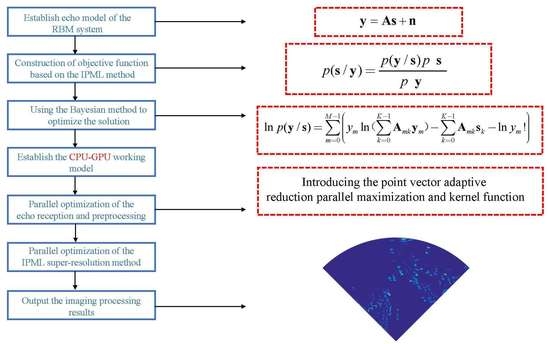
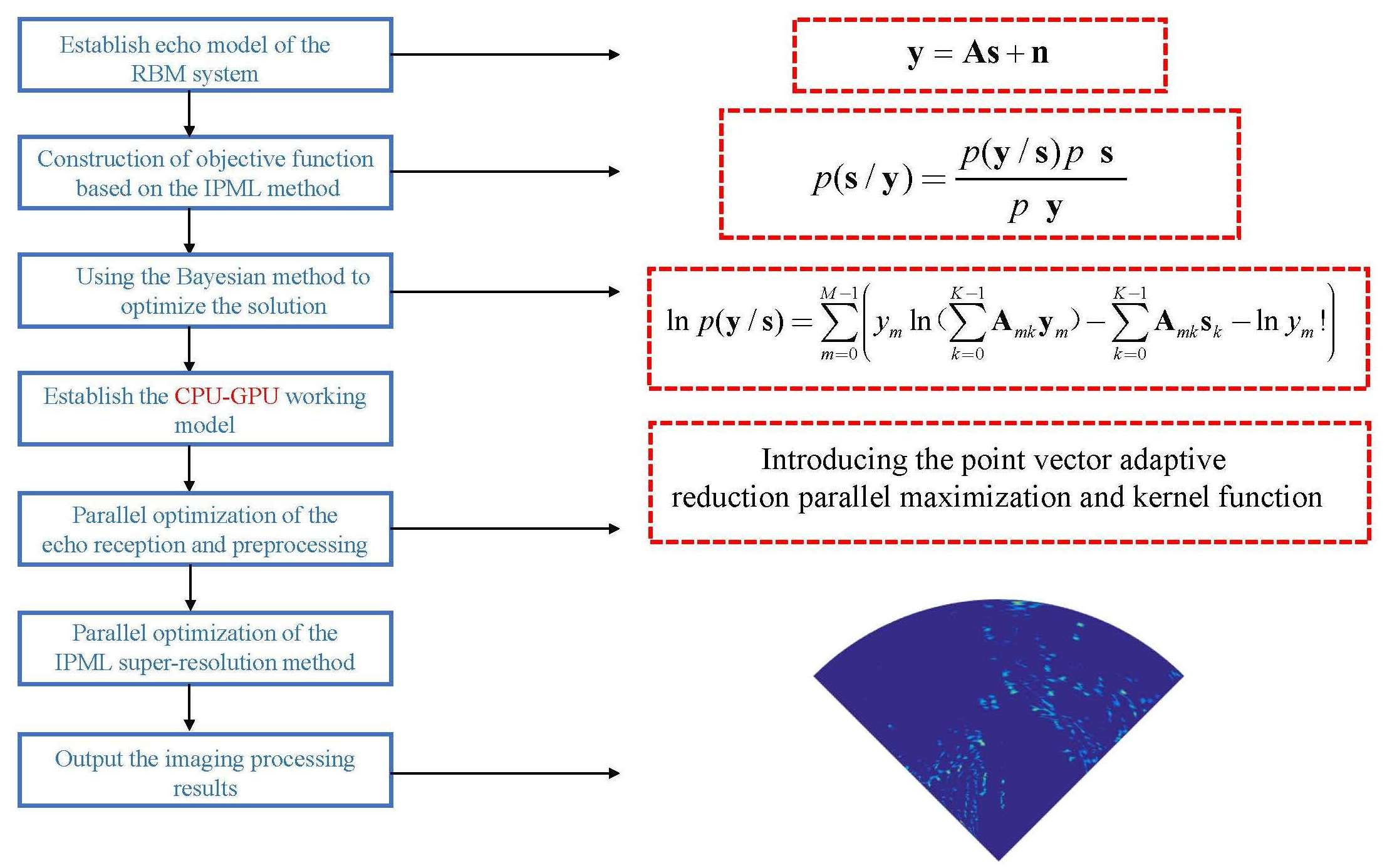
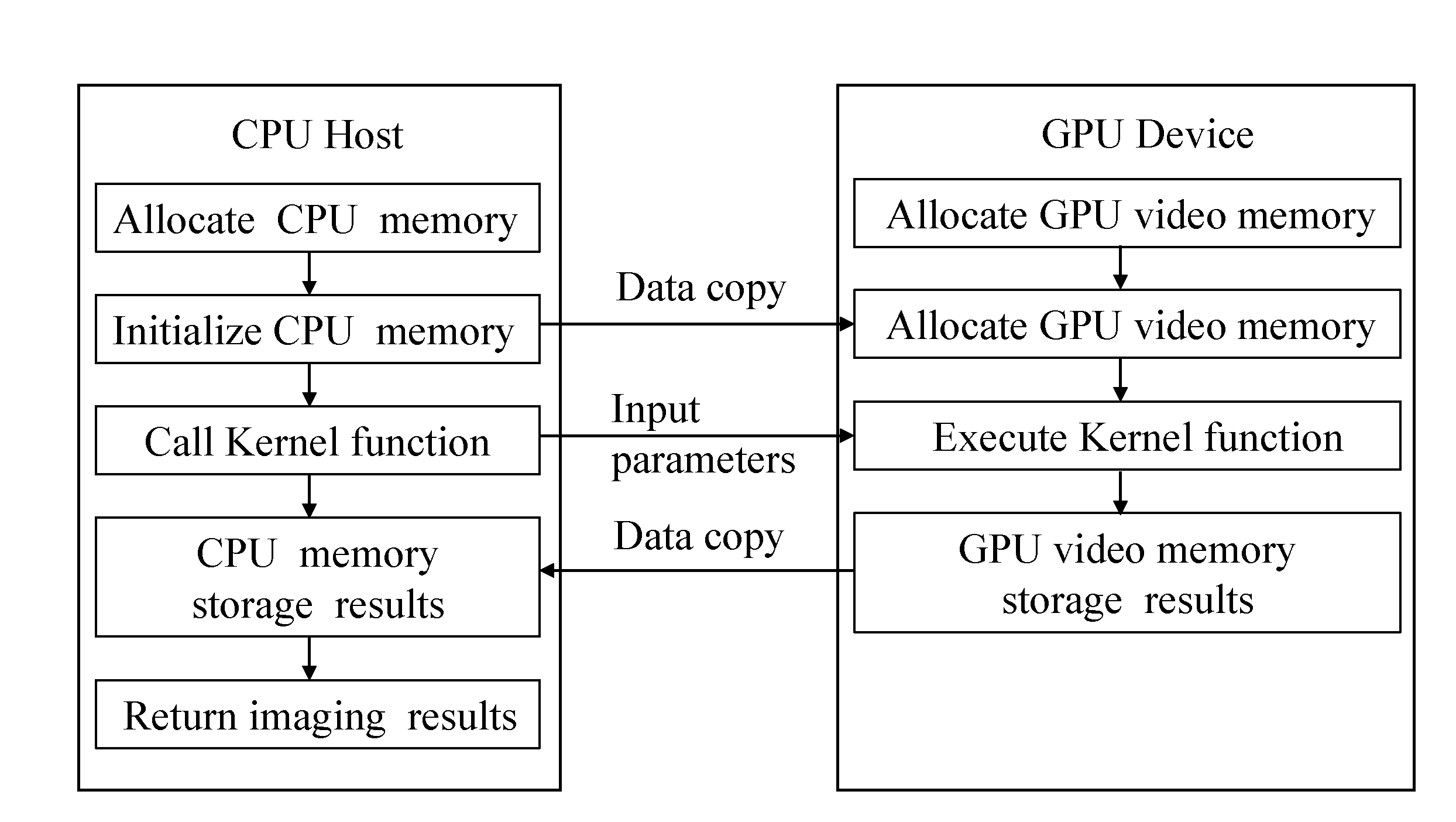
5. Efficient Implementation of the IPML Algorithm Based on the GPU Framework
5.1. Algorithm Complexity Analysis
5.1.1. Range Pulse Compression
5.1.2. Azimuth IPML Super-Resolution
5.2. Two-Dimensional Super-Resolution Efficient Implementation
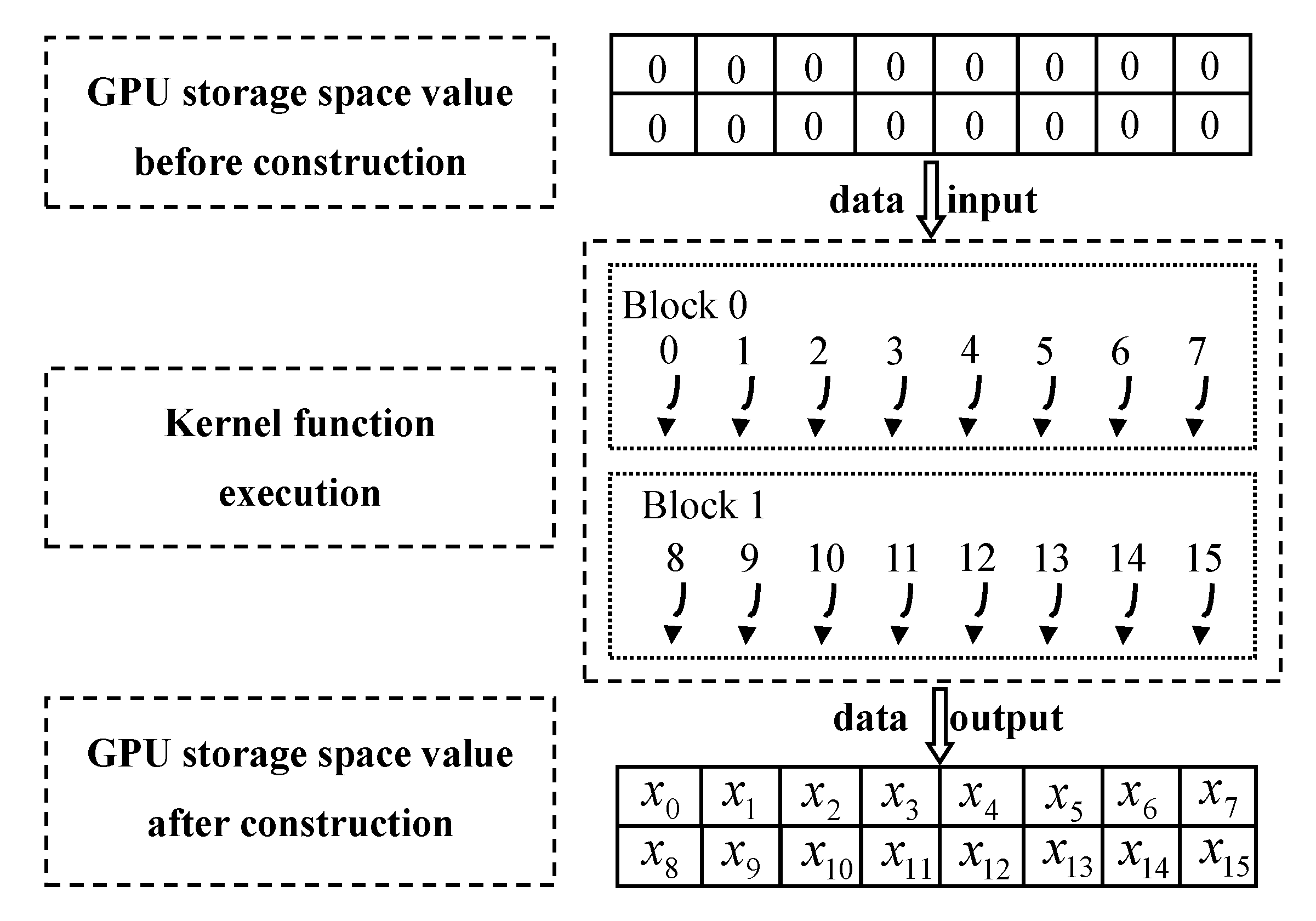
5.2.1. Parallel Implementation of Fourier Transform and Antenna Pattern Preprocessing
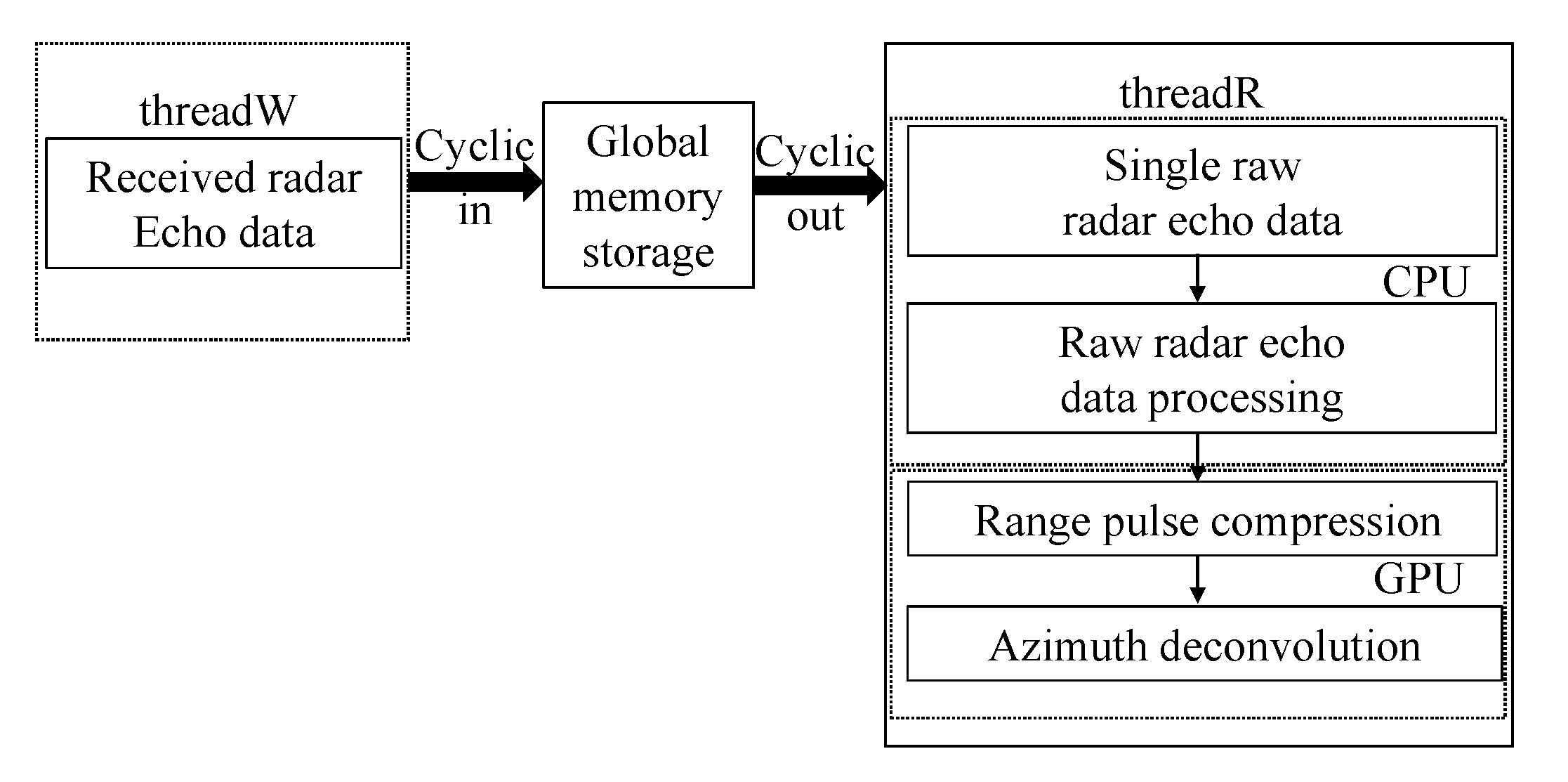
5.2.2. Parallel Realization of the RBM Echo Receiving and Processing
5.2.3. Parallel Implementation of the Range Pulse Compression
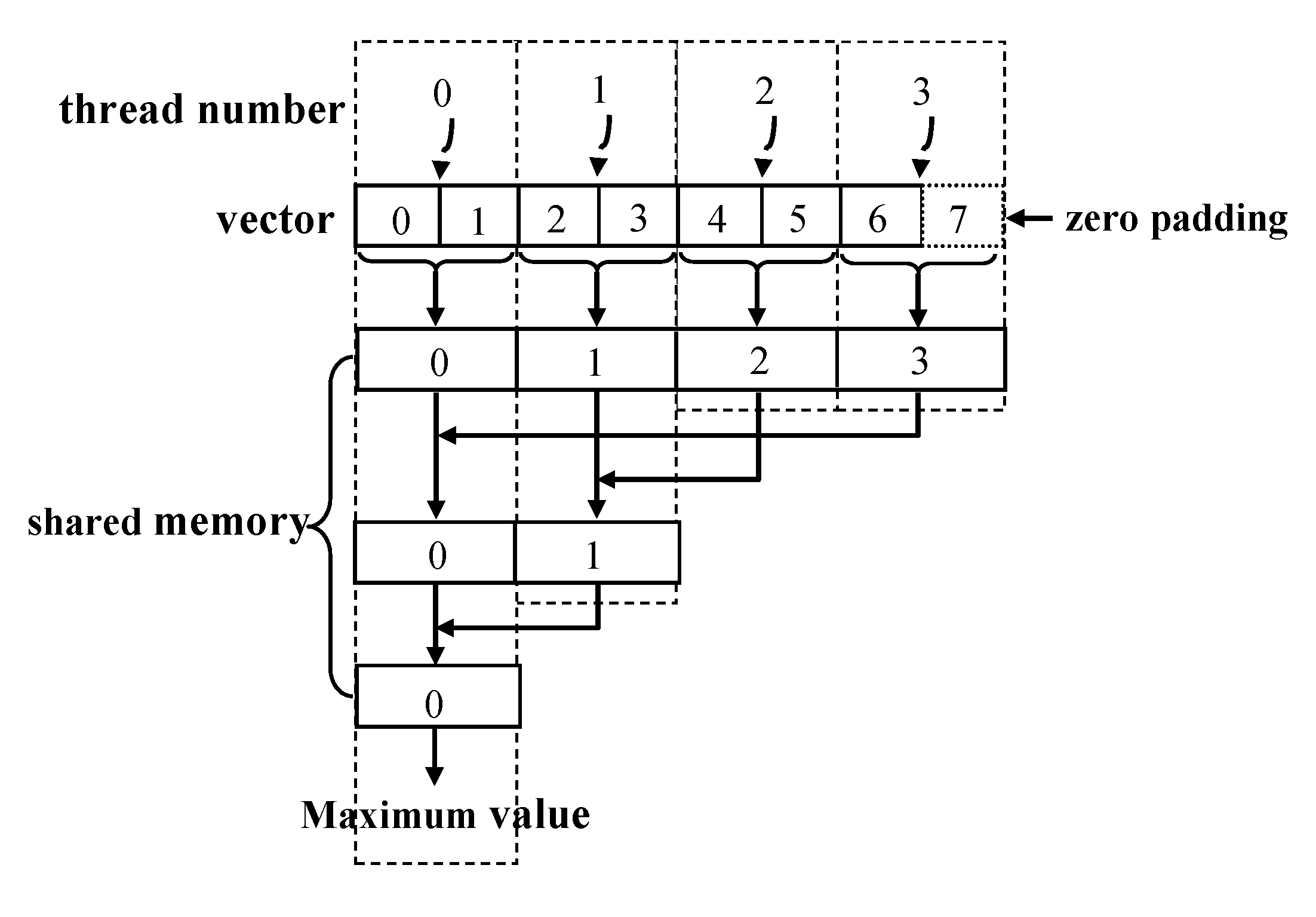
5.2.4. Parallel Implementation of the IPML Super-Resolution Algorithm
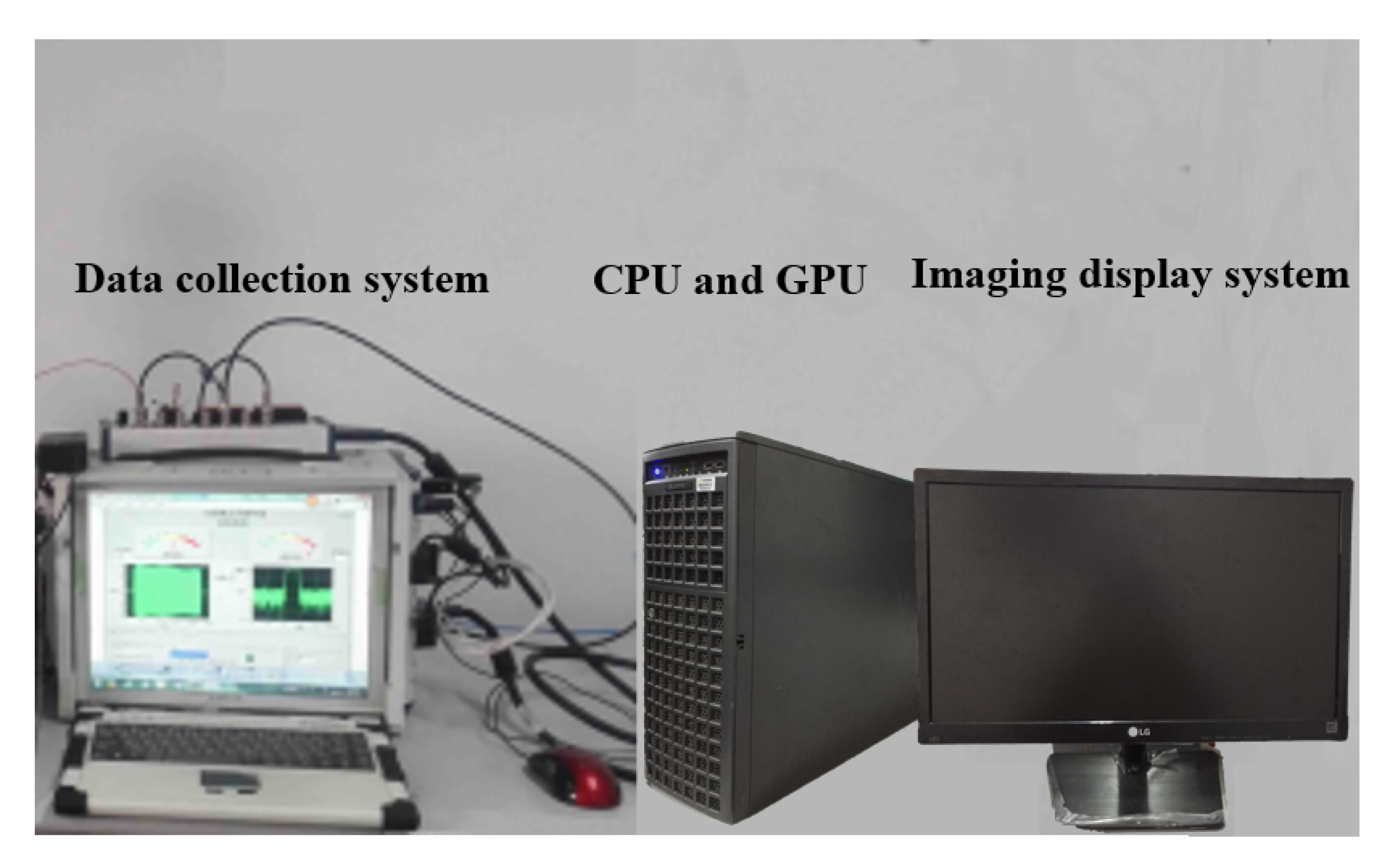
5.3. Experiment Data Verification
5.3.1. Imaging Performance Analysis
5.3.2. Speedup Ratio Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nekrasov, A.; Dell’Acqua, F. Airborne Weather Radar: A theoretical approach for water-surface backscattering and wind measurements. IEEE Geosci. Remote Sens. Mag. 2016, 4, 38–50. [Google Scholar] [CrossRef]
- Gambardella, A.; Migliaccio, M. On the superresolution of microwave scanning radiometer measurements. IEEE Geosci. Remote Sens. Lett. 2008, 5, 796–800. [Google Scholar] [CrossRef]
- Li, X.; He, J.; He, Z.; Zeng, Q. Weather radar range and angular super-resolution reconstruction technique on oversampled reflectivity data. J. Inf. Comput. Sci. 2011, 8, 2553–2562. [Google Scholar]
- Zhang, Y.; Luo, J.; Li, J.; Mao, D.; Zhang, Y.; Huang, Y.; Yang, J. Fast inverse-scattering reconstruction for airborne high-squint radar imagery based on Doppler centroid compensation. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5205517. [Google Scholar] [CrossRef]
- Yang, L.; Bi, G.; Xing, M.; Zhang, L. Airborne SAR moving target signatures and imagery based on LVD. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5958–5971. [Google Scholar] [CrossRef]
- Long, T.; Lu, Z.; Ding, Z.; Liu, L. A DBS Doppler centroid estimation algorithm based on entropy minimization. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3703–3712. [Google Scholar] [CrossRef]
- Rigelsford, J. Introduction to Airborne Radar. Sens. Rev. 2002, 22, 265–266. [Google Scholar]
- Candès, E.J.; Fernandez-Granda, C. Towards a mathematical theory of super-resolution. Commun. Pure Appl. Math. 2014, 67, 906–956. [Google Scholar] [CrossRef] [Green Version]
- Sementilli, P.; Hunt, B.R.; Nadar, M. Analysis of the limit to superresolution in incoherent imaging. JOSA A 1993, 10, 2265–2276. [Google Scholar] [CrossRef]
- Piles, M.; Camps, A.; Vall-Llossera, M.; Talone, M. Spatial-resolution enhancement of SMOS data: A deconvolution-based approach. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2182–2192. [Google Scholar] [CrossRef]
- Sethmann, R.; Burns, B.A.; Heygster, G.C. Spatial resolution improvement of SSM/I data with image restoration techniques. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1144–1151. [Google Scholar] [CrossRef]
- Álvarez-Pérez, J.L.; Marshall, S.J.; Gregson, K. Resolution improvement of ERS scatterometer data over land by Wiener filtering. Remote Sens. Environ. 2000, 71, 261–271. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, Y.; Huang, Y.; Zhang, Y.; Pei, J.; Yi, Q.; Li, W.; Yang, J. TV-sparse super-resolution method for radar forward-looking imaging. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6534–6549. [Google Scholar] [CrossRef]
- Calvetti, D.; Morigi, S.; Reichel, L.; Sgallari, F. Tikhonov regularization and the L-curve for large discrete ill-posed problems. J. Comput. Appl. Math. 2000, 123, 423–446. [Google Scholar] [CrossRef] [Green Version]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Li, W.; Zhang, Y.; Huang, Y.; Yang, J. A fast iterative adaptive approach for scanning radar angular superresolution. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5336–5345. [Google Scholar] [CrossRef]
- Sadjadi, F. Radar beam sharpening using an optimum FIR filter. Circuits Syst. Signal Process. 2000, 19, 121–129. [Google Scholar] [CrossRef]
- Suzuki, T. Radar beamwidth reduction techniques. IEEE Aerosp. Electron. Syst. Mag. 1998, 13, 43–48. [Google Scholar] [CrossRef]
- Zhang, Y.; Tuo, X.; Huang, Y.; Yang, J. A TV forward-looking super-resolution imaging method based on TSVD strategy for scanning radar. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4517–4528. [Google Scholar] [CrossRef]
- Tuo, X.; Zhang, Y.; Huang, Y.; Yang, J. Fast sparse-TSVD super-resolution method of real aperture radar forward-looking imaging. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6609–6620. [Google Scholar] [CrossRef]
- Lenti, F.; Nunziata, F.; Migliaccio, M.; Rodriguez, G. Two-dimensional TSVD to enhance the spatial resolution of radiometer data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2450–2458. [Google Scholar] [CrossRef]
- Shea, J.D.; Van Veen, B.D.; Hagness, S.C. A TSVD analysis of microwave inverse scattering for breast imaging. IEEE Trans. Biomed. Eng. 2011, 59, 936–945. [Google Scholar] [CrossRef] [Green Version]
- Ly, C.; Dropkin, H.; Manitius, A.Z. Extension of the music algorithm to millimeter-wave (mmw) real-beam radar scanning antennas. In Proceedings of the Radar Sensor Technology and Data Visualization, Orlando, FL, USA, 1–4 April 2002; SPIE: Bellingham, WA, USA, 2002; Volume 4744, pp. 96–107. [Google Scholar]
- Uttam, S.; Goodman, N.A. Superresolution of coherent sources in real-beam data. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1557–1566. [Google Scholar] [CrossRef]
- Zhang, Y.; Jakobsson, A.; Yang, J. Range-recursive IAA for scanning radar angular super-resolution. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1675–1679. [Google Scholar] [CrossRef]
- Strnad, D.; Nerat, A. Parallel construction of classification trees on a GPU. Concurr. Comput. Pract. Exp. 2016, 28, 1417–1436. [Google Scholar] [CrossRef]
- Mao, D.; Zhang, Y.; Zhang, Y.; Huang, Y.; Yang, J. Realization of airborne forward-looking radar super-resolution algorithm based on GPU frame. In Proceedings of the 2016 IEEE CIE International Conference on Radar (RADAR), Guangzhou, China, 10–13 October 2016; pp. 1–5. [Google Scholar]
- Corporation, N. CUDA C Programming Guide; NVIDIA: Santa Clara, CA, USA, 2017. [Google Scholar]
- Guan, J.; Huang, Y.; Yang, J.; Li, W.; Wu, J. Improving angular resolution based on maximum a posteriori criterion for scanning radar. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 451–454. [Google Scholar]
- Li, D.; Li, Y.; Wang, L.; Zhong, Y.; Yan, K. Improved Landweber Iteration-Based Angular Superresolution for Airborne Forward-Looking Radar. ICIC Express Lett. Part B Appl. Int. J. Res. Surv. 2017, 8, 1121–1126. [Google Scholar]
- Tan, X.; Roberts, W.; Li, J.; Stoica, P. Sparse learning via iterative minimization with application to MIMO radar imaging. IEEE Trans. Signal Process. 2010, 59, 1088–1101. [Google Scholar] [CrossRef]
- Xu, G.; Xing, M.; Zhang, L.; Liu, Y.; Li, Y. Bayesian inverse synthetic aperture radar imaging. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1150–1154. [Google Scholar] [CrossRef]
- Guan, J.; Yang, J.; Huang, Y.; Li, W. Maximum a posteriori–based angular superresolution for scanning radar imaging. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2389–2398. [Google Scholar] [CrossRef]
- Tan, K.; Li, W.; Huang, Y.; Yang, J. Dual-channel fast iterative shrinkage-thresholding regularization algorithm for scanning radar forward-looking imaging. J. Appl. Remote Sens. 2017, 11, 015008. [Google Scholar] [CrossRef]
- Tai, X.C.; Wu, C. Augmented Lagrangian method, dual methods and split Bregman iteration for ROF model. In Proceedings of the International Conference on Scale Space and Variational Methods in Computer Vision, Voss, Norway, 1–5 June 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 502–513. [Google Scholar]
- Li, P.; Bu, J.; Yu, J.; Chen, C. Towards robust subspace recovery via sparsity-constrained latent low-rank representation. J. Vis. Commun. Image Represent. 2016, 37, 46–52. [Google Scholar] [CrossRef]
- Zhang, Y.; Luo, J.; Zhang, Y.; Huang, Y.; Cai, X.; Yang, J.; Mao, D.; Li, J.; Tuo, X.; Zhang, Y. Resolution Enhancement for Large-Scale Real Beam Mapping Based on Adaptive Low-Rank Approximation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5116921. [Google Scholar] [CrossRef]
- Migliaccio, M.; Gambardella, A. Microwave radiometer spatial resolution enhancement. IEEE Trans. Geosci. Remote Sens. 2005, 43, 1159–1169. [Google Scholar] [CrossRef]
- Early, D.S.; Long, D.G. Image reconstruction and enhanced resolution imaging from irregular samples. IEEE Trans. Geosci. Remote Sens. 2001, 39, 291–302. [Google Scholar] [CrossRef] [Green Version]
- Holmes, T.J.; Liu, Y.H. Acceleration of maximum-likelihood image restoration for fluorescence microscopy and other noncoherent imagery. JOSA A 1991, 8, 893–907. [Google Scholar] [CrossRef]
- Biggs, D.S.; Andrews, M. Acceleration of iterative image restoration algorithms. Appl. Opt. 1997, 36, 1766–1775. [Google Scholar] [CrossRef] [Green Version]
- Singh, M.K.; Tiwary, U.S.; Kim, Y.H. An adaptively accelerated Lucy-Richardson method for image deblurring. EURASIP J. Adv. Signal Process. 2007, 2008, 365021. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Zha, Y.; Wang, Y.; Yang, J. Forward looking radar imaging by truncated singular value decomposition and its application for adverse weather aircraft landing. Sensors 2015, 15, 14397–14414. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Antenna beamwidth | 1.2° |
| Antenna scanning speed | 30°/s |
| Carrier frequency | 30 GHz |
| Bandwidth | 2 MHz |
| Pulse width | 5 s |
| Pulse repetition frequency | 1500 Hz |
| Scanning range | −10°–10° |
| Parameter | Value |
|---|---|
| Carrier frequency | X band |
| Beam width | 5.1° |
| Bandwidth | 75 MHz |
| PRF | 204 Hz |
| Scanning speed | 72°/s |
| Echo Size (Range * Azimuth) | Matlab | GPU | Speedup Ratio |
|---|---|---|---|
| 1024 * 1024 | 4411 | 37 | 119 |
| 1024 * 2048 | 7824 | 58 | 135 |
| 2048 * 2048 | 16,659 | 100 | 167 |
| 2048 * 4096 | 28,294 | 230 | 123 |
| 4096 * 4096 | 54,529 | 455 | 120 |
| 4096 * 8192 | 104,967 | 961 | 109 |
| 8192 * 8192 | 205,350 | 2151 | 95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Zhang, Y.; Mao, D.; Yan, J.; Liu, S. Fast Resolution Enhancement for Real Beam Mapping Using the Parallel Iterative Deconvolution Method. Remote Sens. 2023, 15, 1164. https://doi.org/10.3390/rs15041164
Zhang P, Zhang Y, Mao D, Yan J, Liu S. Fast Resolution Enhancement for Real Beam Mapping Using the Parallel Iterative Deconvolution Method. Remote Sensing. 2023; 15(4):1164. https://doi.org/10.3390/rs15041164
Chicago/Turabian StyleZhang, Ping, Yongchao Zhang, Deqing Mao, Jianan Yan, and Shuaidi Liu. 2023. "Fast Resolution Enhancement for Real Beam Mapping Using the Parallel Iterative Deconvolution Method" Remote Sensing 15, no. 4: 1164. https://doi.org/10.3390/rs15041164