
An Increase of GNSS Data Time Rate and Analysis of the Carrier Phase Spectrum



Abstract
:1. Introduction
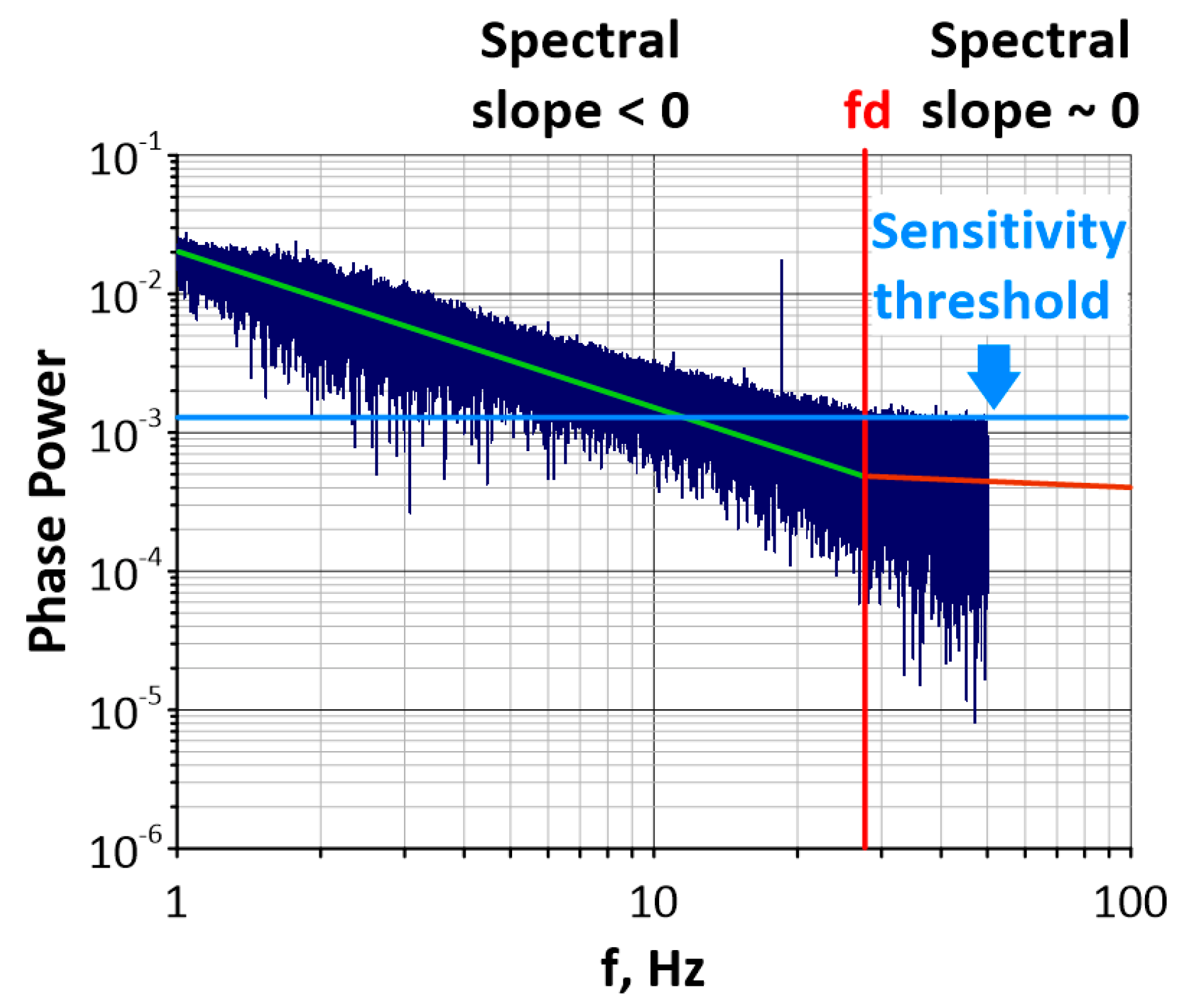
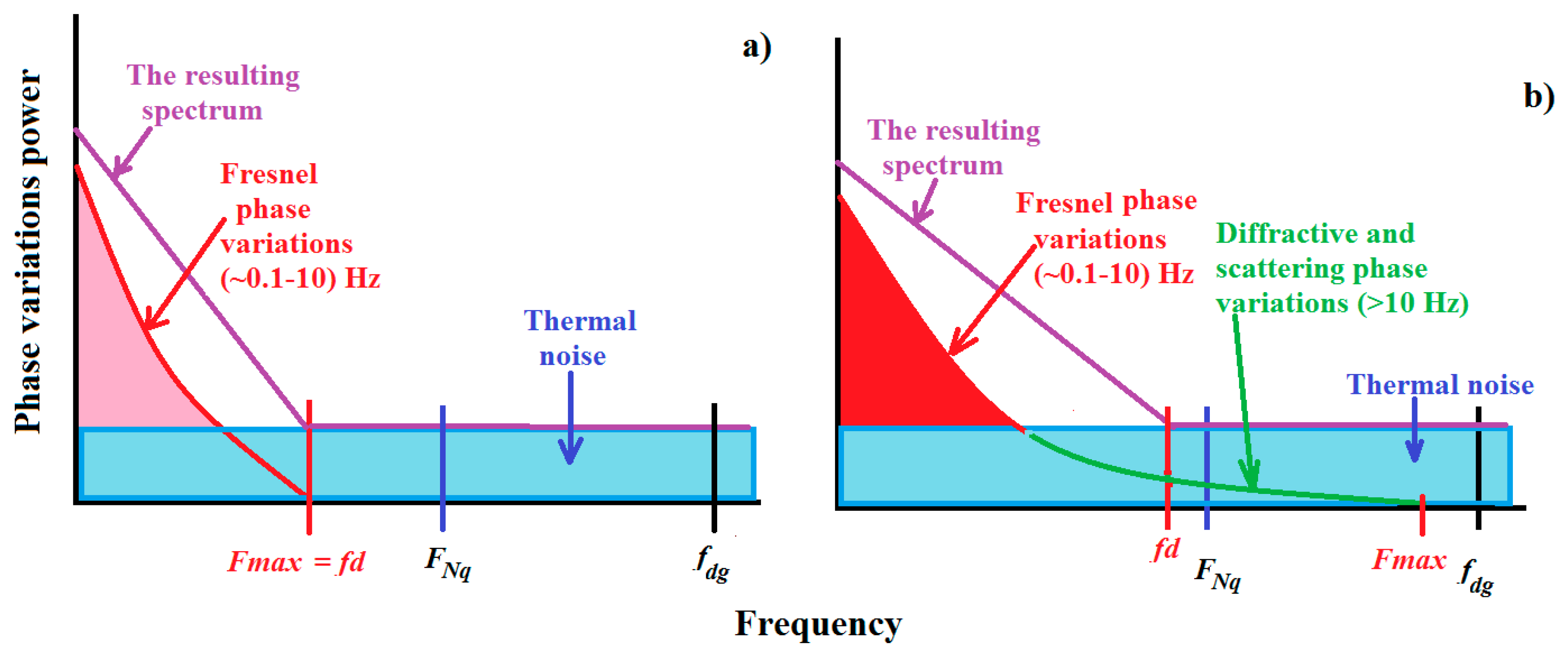
2. Deviation frequency and GNSS Sounding Methods Sensitivity
3. Experiment Description
4. Experimental Results
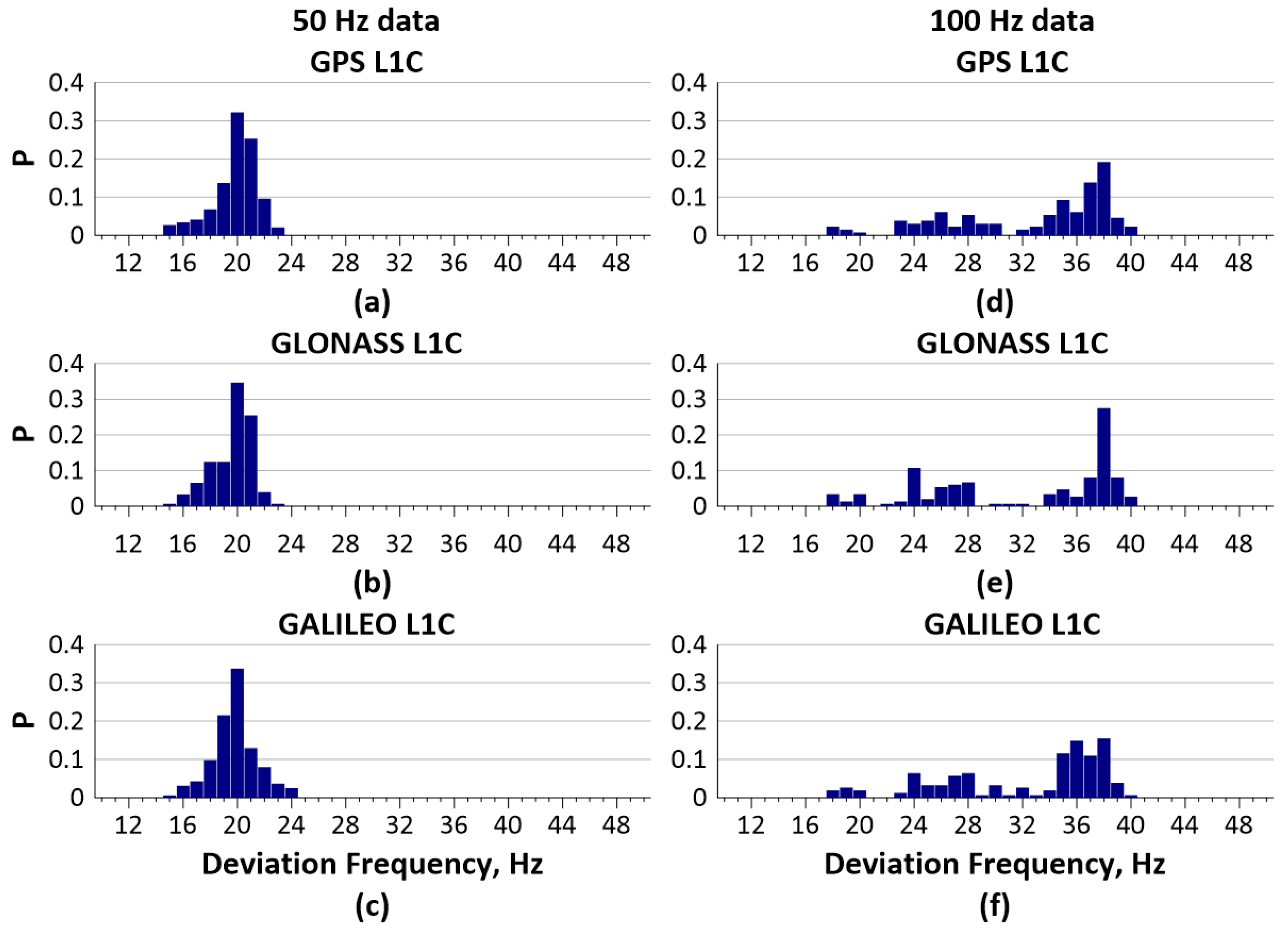
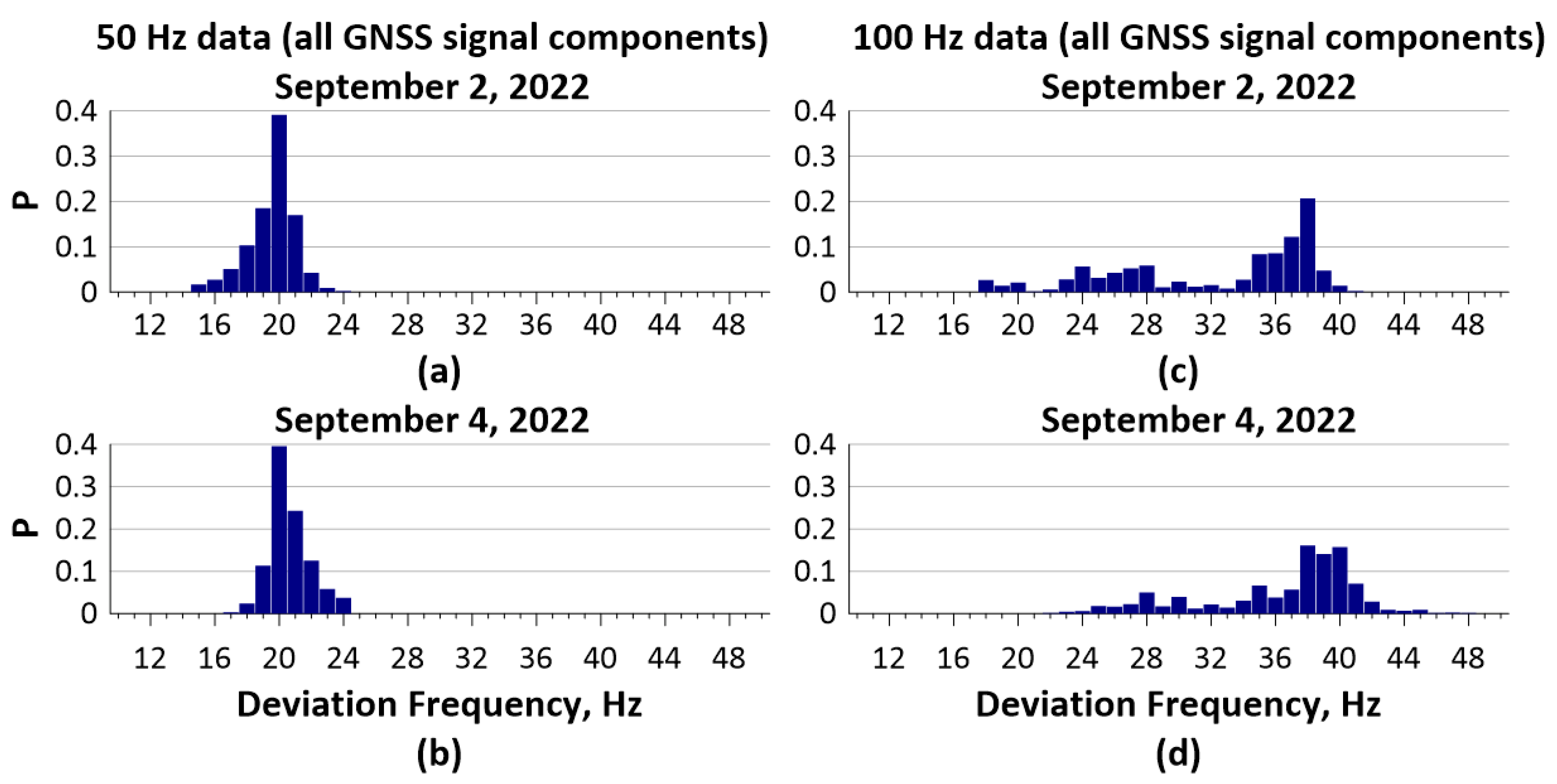
4.1. Dependence of the Deviation Frequency on the Sampling Rate
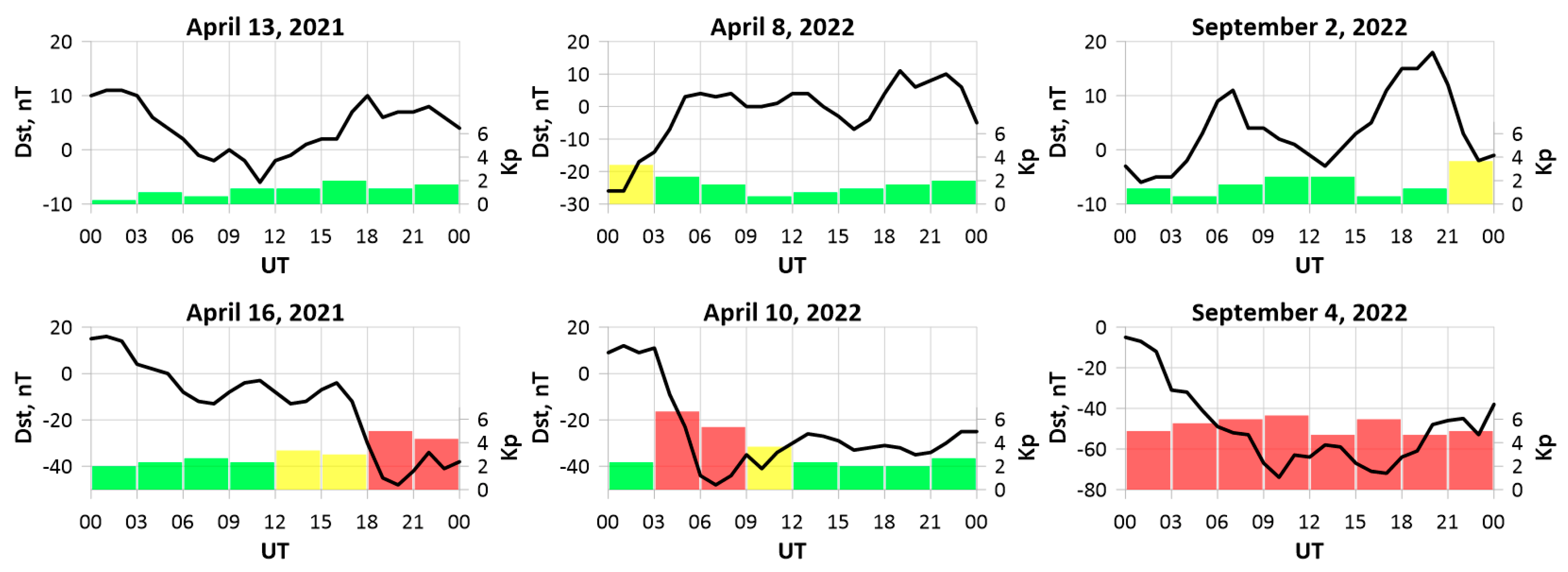
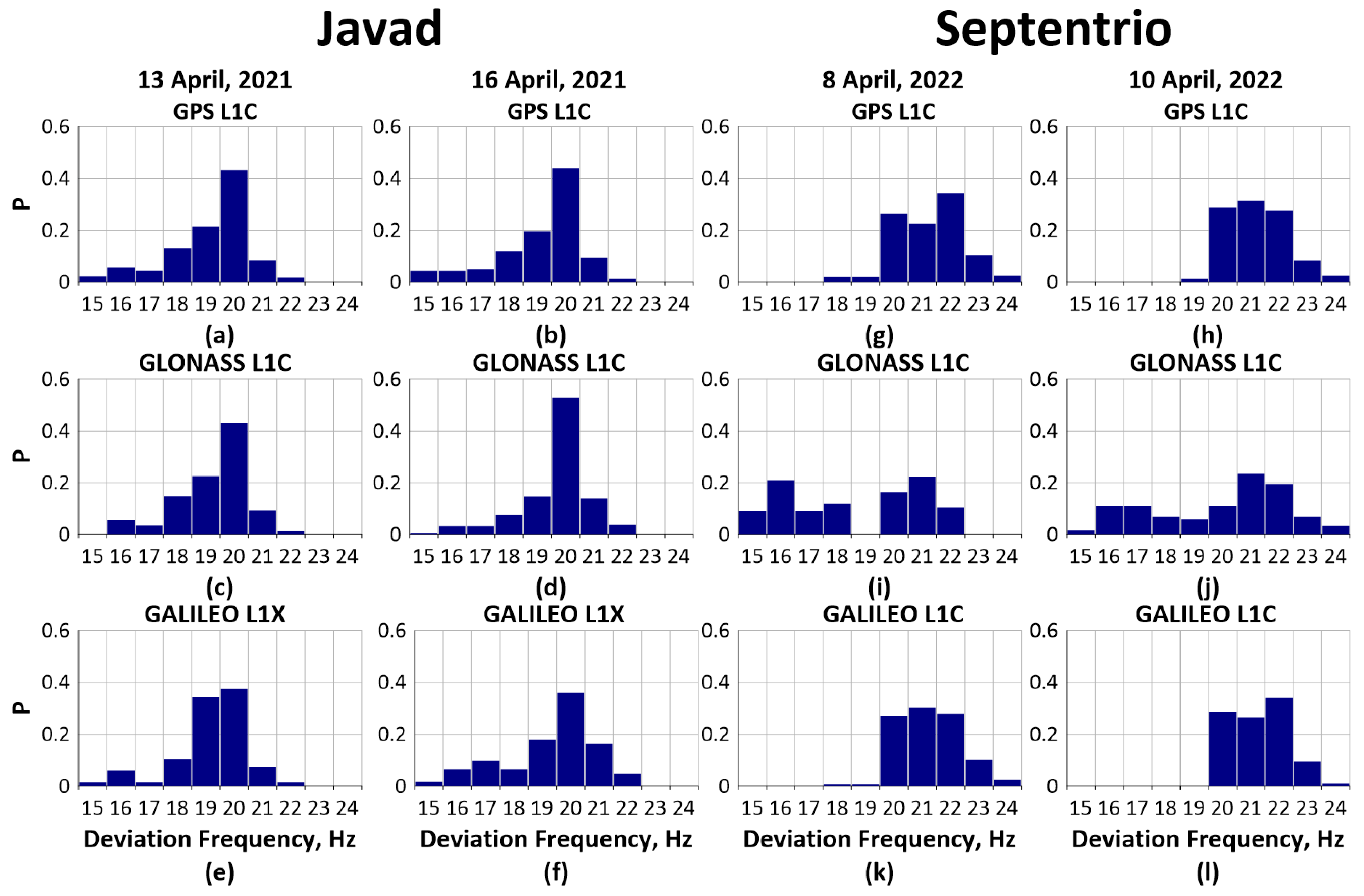
4.2. Variations of Deviation Frequency Depending on Geomagnetic Conditions
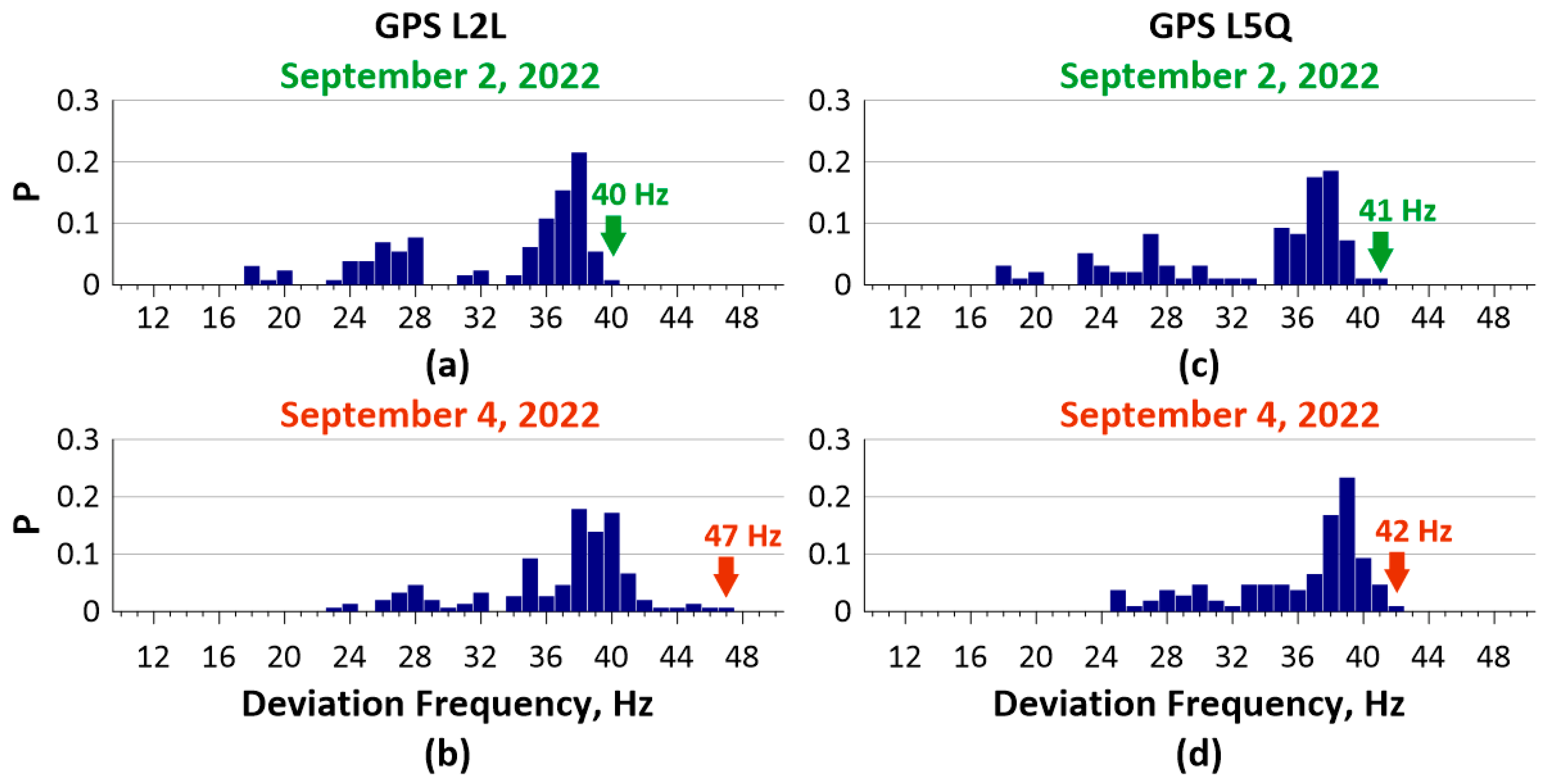
4.3. Maximal Observed Deviation Frequency Depending on the GNSS Signal Component
- Without regard to the particular GNSS system or its signal component, fd reacts to a geomagnetic storm. It manifests as the shift of fd values to higher frequencies in the majority of cases.
- Different signal components show different intensities of response. This difference is significantly more pronounced for the Septentrio data set. This is probably due to the lower phase measurement noise compared to the phase measurement noise in the Javad receiver [13].
- The fd value for GPS and Galileo signals varied slightly more than for GLONASS and SBAS.
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Astafyeva, E. Ionospheric Detection of Natural Hazards. Rev. Geophys. 2019, 57, 1265–1288. [Google Scholar] [CrossRef]
- Calais, E.; Minster, J.B. GPS detection of ionospheric perturbations following the January 17, 1994, Northridge Earthquake. Geophys. Res. Lett. 1995, 22, 1045–1048. [Google Scholar] [CrossRef]
- Savastano, G.; Komjathy, A.; Verkhoglyadova, O.; Mazzoni, A.; Crespi, M.; Wei, Y.; Mannucci, A.J. Real-Time Detection of Tsunami Ionospheric Disturbances with a Stand-Alone GNSS Receiver: A Preliminary Feasibility Demonstration. Sci. Rep. 2017, 7, 46607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Polyakova, A.; Perevalova, N. Investigation into impact of tropical cyclones on the ionosphere using GPS sounding and NCEP/NCAR Reanalysis data. Adv. Space Res. 2011, 48, 1196–1210. [Google Scholar] [CrossRef]
- Shestakov, N.; Orlyakovskiy, A.; Perevalova, N.; Titkov, N.; Chebrov, D.; Ohzono, M.; Takahashi, H. Investigation of Ionospheric Response to June 2009 Sarychev Peak Volcano Eruption. Remote Sens. 2021, 13, 638. [Google Scholar] [CrossRef]
- Perevalova, N.P.; Shestakov, N.V.; Voeykov, S.V.; Takahashi, H.; Guojie, M. Ionospheric disturbances in the vicinity of the Chelyabinsk meteoroid explosive disruption as inferred from dense GPS observations. Geophys. Res. Lett. 2015, 42, 6535–6543. [Google Scholar] [CrossRef]
- Sergeeva, M.; Demyanov, V.; Maltseva, O.; Mokhnatkin, A.; Rodriguez-Martinez, M.; Gutierrez, R.; Vesnin, A.; Gatica-Acevedo, V.; Gonzalez-Esparza, J.; Fedorov, M.; et al. Assessment of Morelian Meteoroid Impact on Mexican Environment. Atmosphere 2021, 12, 185. [Google Scholar] [CrossRef]
- Afraimovich, E.L.; Kosogorov, E.A.; Palamarchouk, K.S.; Perevalova, N.P.; Plotnikov, A.V. The use of GPS arrays in detecting the ionospheric response during rocket launchings. Earth Planets Space 2000, 52, 1061–1066. [Google Scholar] [CrossRef] [Green Version]
- Fitzgerald, T. Observations of total electron content perturbations on GPS signals caused by a ground level explosion. J. Atmos. Solar-Terr. Phys. 1997, 59, 829–834. [Google Scholar] [CrossRef]
- Martire, L.; Krishnamoorthy, S.; Vergados, P.; Romans, L.J.; Szilágyi, B.; Meng, X.; Anderson, J.L.; Komjáthy, A.; Bar-Sever, Y.E. The GUARDIAN system-a GNSS upper atmospheric real-time disaster information and alert network. GPS Solut. 2023, 27, 32. [Google Scholar] [CrossRef]
- Yasyukevich, Y.V.; Kiselev, A.V.; Zhivetiev, I.V.; Edemskiy, I.K.; Syrovatskiy, S.V.; Maletckii, B.M.; Vesnin, A.M. SIMuRG: System for Ionosphere Monitoring and Research from GNSS. GPS Solut. 2020, 24, 1–12. [Google Scholar] [CrossRef]
- McCaffrey, A.M.; Jayachandran, P.T.; Langley, R.B.; Sleewaegen, J.-M. On the accuracy of the GPS L2 observable for ionospheric monitoring. GPS Solut. 2017, 22, 23. [Google Scholar] [CrossRef]
- Demyanov, V.; Sergeeva, M.; Fedorov, M.; Ishina, T.; Gatica-Acevedo, V.; Cabral-Cano, E. Comparison of TEC Calculations Based on Trimble, Javad, Leica, and Septentrio GNSS Receiver Data. Remote Sens. 2020, 12, 3268. [Google Scholar] [CrossRef]
- Zhang, L.; Morton, Y. GPS Carrier Phase Spectrum Estimation for Ionospheric Scintillation Studies. J. Inst. Navig. 2013, 60, 113–122. [Google Scholar] [CrossRef]
- Demyanov, V.; Danilchuk, E.; Yasyukevich, Y.; Sergeeva, M. Experimental Estimation of Deviation Frequency within the Spectrum of Scintillations of the Carrier Phase of GNSS Signals. Remote Sens. 2021, 13, 5017. [Google Scholar] [CrossRef]
- Tsugawa, T.; Saito, A.; Otsuka, Y.; Nishioka, M.; Maruyama, T.; Kato, H.; Nagatsuma, T.; Murata, K.T. Ionospheric disturbances detected by GPS total electron content observation after the 2011 off the Pacific coast of Tohoku Earthquake. Earth Planets Space 2011, 63, 875–879. [Google Scholar] [CrossRef] [Green Version]
- Matsumura, M.; Saito, A.; Iyemori, T.; Shinagawa, H.; Tsugawa, T.; Otsuka, Y.; Nishioka, M.; Chen, C.H. Numerical simulations of atmospheric waves excited by the 2011 off the Pacific coast of Tohoku Earth-quake. Earth Planets Space 2011, 63, 885–889. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Jin, R.; Li, D. GPS detection of ionospheric Rayleigh wave and its source following the 2012 Haida Gwaii earthquake. J. Geophys. Res. Space Phys. 2017, 122, 1360–1372. [Google Scholar] [CrossRef]
- Saito, A.; Tsugawa, T.; Otsuka, Y.; Nishioka, M.; Iyemori, T.; Matsumura, M.; Saito, S.; Chen, C.H.; Goi, Y.; Choosakul, N. Acoustic resonance and plasma depletion detected by GPS total electron content observation after the 2011 off the Pacific coast of Tohoku Earthquake. Earth Planets Space 2011, 63, 863–867. [Google Scholar] [CrossRef] [Green Version]
- Kersten, T.; Paffenholz, J.-A. Feasibility of Consumer Grade GNSS Receivers for the Integration in Multi-Sensor-Systems. Sensors 2020, 20, 2463. [Google Scholar] [CrossRef]
- McCaffrey, A.M.; Jayachandran, P.T. Spectral characteristics of auroral region scintillation using 100 Hz sampling. GPS Solut. 2017, 21, 1883–1894. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Z. Investigating the inconsistency of ionospheric ROTI indices derived from GPS modernized L2C and legacy L2 P(Y) signals at low-latitude regions. GPS Solut. 2016, 21, 783–796. [Google Scholar] [CrossRef]
- Bolla, P.; Borre, K. Performance analysis of dual-frequency receiver using combinations of GPS L1, L5, and L2 civil signals. J. Geodesy 2018, 93, 437–447. [Google Scholar] [CrossRef]
- Demyanov, V.V.; Sergeeva, M.A.; Yasyukevich, A.S. GNSS High-Rate Data and the Efficiency of Ionospheric Scintillation Indices. In Satellites Missions and Technologies for Geosciences; IntechOpen: London, UK, 2019. [Google Scholar]
- JAVAD DELTA-3 for TRE-3. Rev.1.1. Available online: http://www.javad.com/jgnss/products/ (accessed on 16 January 2023).
- Septentrio PolaRx5S. Available online: http://www.septentrio.com (accessed on 16 January 2023).
- Yasyukevich, Y.V.; Vesnin, A.M.; Perevalova, N.P. SibNet—Siberian Global Navigation Satellite System Network: Current state. Sol. Terr. Phys. 2018, 4, 63–72. [Google Scholar]
- JAVAD GrAnt. Rev. 2.5. Available online: https://www.javad.com/jgnss/products/antennas/ (accessed on 16 January 2023).
- IS-GPS-200 J; Global Positioning Systems Directorate Systems Engineering and Integration Interface Specification. 2018. Available online: https://www.gps.gov/technical/icwg/IS-GPS-200J.pdf (accessed on 16 January 2023).
- IS-GPS-705 A; Global Positioning System Wing (GPSW) Systems Engineering and Integration Interface Specification. 2010. Available online: http://everyspec.com/MISC/IS-GPS-705D_53534/ (accessed on 16 January 2023).
- Global Navigation Satellite System GLONASS. Interface Control Document. In Code Division Multiple Access Service Navigation Signal in L1 Frequency Band. ICD GLONASS CDMA L1, 1st ed.; Global Navigation Satellite System GLONASS: Russia, 2016; Available online: https://russianspacesystems.ru/wp-content/uploads/2016/08/ICD-GLONASS-CDMA-L1.-Edition-1.0-2016.pdf (accessed on 16 January 2023).
- Global Navigation Satellite System GLONASS. Interface Control Document. In Code Division Multiple Access Service Navigation Signal in L3 Frequency Band. ICD GLONASS CDMA L3, 1st ed.; Global Navigation Satellite System GLONASS: Russia, 2016; Available online: https://russianspacesystems.ru/wp-content/uploads/2016/08/ICD-GLONASS-CDMA-L3.-Edition-1.0-2016.pdf (accessed on 16 January 2023).
- European Gnss (Galileo). Open Service Signal in Space Interface Control Document. Issue 2.0. OS SIS ICD. European GNSS Agency. 2021. Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_OS_SIS_ICD_v2.0.pdf (accessed on 16 January 2023).
- Gurtner, W.; Estey, L. RINEX: The Receiver Independent Exchange Format, version 3.01; Astronomical Institute, University of Bern: Boulder, CO, USA, 2009; Available online: https://files.igs.org/pub/data/format/rinex301.pdf (accessed on 16 January 2023).
- Yeh, C.K.; Liu, C.H. Radio wave scintillations in the ionosphere. Proc. IEEE 1982, 70, 324–360. [Google Scholar]
- Afraimovich, E.L.; Astafyeva, E.I.; Demyanov, V.; Edemskiy, I.; Gavrilyuk, N.S.; Ishin, A.; Kosogorov, E.A.; Leonovich, L.A.; Lesyuta, O.S.; Palamartchouk, K.; et al. A review of GPS/GLONASS studies of the ionospheric response to natural and anthropogenic processes and phenomena. J. Space Weather. Space Clim. 2013, 3, A27. [Google Scholar] [CrossRef] [Green Version]
- Jovanovic, A.; Tawk, Y.; Botteron, C.; Farine, P.-A. Multipath Mitigation Techniques for CBOC, TMBOC and AltBOC Signals Using Advanced Correlators Architectures. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 1127–1136. [Google Scholar]
- Padokhin, A.M.; Mylnikova, A.A.; Yasyukevich, Y.V.; Morozov, Y.V.; Kurbatov, G.A.; Vesnin, A.M. Galileo E5 AltBOC Signals: Application for Single-Frequency Total Electron Content Estimations. Remote Sens. 2021, 13, 3973. [Google Scholar] [CrossRef]
- Ray, J.K. Mitigation of GPS Code and Carrier Phase Multipath Effects Using a Multi-Antenna System; University of Calgary: Calgary, AB, Canada, 2000; 286p. [Google Scholar]
- Kaplan, E.D. Understanding GPS: Principles and Applications; Artech House Publisher: Boston, MA, USA; London, UK, 1996; p. 556. [Google Scholar]
- Bakitko, R.V.; Bulavskyi, N.T.; Gorev, A.P.; Dvorkin, V.V.; Efimenko, V.S.; Ivanov, N.E.; Karpeykin, A.V.; Mishenko, I.N.; Nartov, V.Y.; Perov, A.I.; et al. GLONASS: Principles of the Construction and Functioning, 4th ed.; Perov, A.I., Kharisov, V.N., Eds.; Radiotekhnika: Moskow, Russia, 2010; p. 800. (In Russian) [Google Scholar]
- Matzka, J.; Bronkalla, O.; Tornow, K.; Elger, K.; Stolle, C. Geomagnetic Kp Index, Version 1.0. GFZ Data Services; German Research Centre for Geosciences: Potsdam, Germany, 2021. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Signal | PRN Code Chip Rate, Mchips/s | PRN Code LengthChips | Total Received Minimum Power, dBW | Receiver Reference Bandwidth, MHz | Modulation Type |
|---|---|---|---|---|---|---|
| GPS | L1C | 1.023 | 1023 | −158.50 | 20.46 | BPSK |
| L2C | 0.511 | 10,230 (CM code) 767,250 (CL code) | −164.5 (SV II) −160.0 (SV IIF) −158.5 (SV III) | 20.46 (30.69 for SV III Blocks) | BPSK | |
| GLONASS | L5Q | 10.23 | 10,230 | −157.90 | 24.00 | BPSK |
| L1C (CDMA) | 0.511 | 4092 | −158.50 | 17.10 | BPSK | |
| L1C (FDMA) | 0.511 | 511 | −161.00 | 8.00 | BPSK | |
| L2C (CDMA) | 0.511 | 10,230 | −158.50 | 19.00 | BPSK | |
| L2C (FDMA) | 0.511 | 511 | −161.00 | 7.00 | BPSK | |
| Galileo | L1C | 1.023 | 4092 | −157.25 | 24.55 | CBOC |
| L6C | 5.115 | N/A | −155.25 | 40.90 | CBOC | |
| L7Q | 10.230 | 10,230 | −155.25 | 20.46 | AltBOC | |
| L8Q | 10.230 | 10,230 | −155.25 | 20.46 | AltBOC | |
| L5Q | 10.230 | 10,230 | −155.25 | 20.46 | AltBOC | |
| SBAS | L1C | 1.023 | 1023 | −161.00 | 24.00 | BPSK |
| System | Signal | Observed Deviation Frequencies, Hz | |||
|---|---|---|---|---|---|
| Quiet Conditions | Magnetic Storm | Quiet Conditions | Magnetic Storm | ||
| September 2 | September 4 | April 8 | April 10 | ||
| GPS | L1C | 15–23 | 17–24 | 18–24 | 19–24 |
| L2C | 15–22 | 18–24 | 19–24 | 18–24 | |
| L5Q | 15–22 | 18–24 | 16–24 | 19–24 | |
| GLONASS | L1C | 15–23 | 18–24 | 15–22 | 15–24 |
| L2C | 15–23 | 18–24 | 15–22 | 16–24 | |
| Galileo | L1C | 15–24 | 17–24 | 18–24 | 20–24 |
| L6C | 15–23 | 17–24 | 18–24 | 18–24 | |
| L7Q | 15–22 | 17–24 | 18–24 | 18–24 | |
| L5Q | 15–22 | 18–24 | 19–24 | 18–24 | |
| SBAS | L1C | 15–23 | 15–24 | 20–24 | 20–24 |
| System | Signal | Observed Deviation Frequencies, Hz | |
|---|---|---|---|
| Quiet Conditions | Magnetic Storm | ||
| GPS | L1C | 15–22 | 16–22 |
| L1W | 15–22 | 16–22 | |
| L2W | 15–22 | 16–22 | |
| L2X | 15–22 | 15–22 | |
| L5X | 15–22 | 15–22 | |
| GLONASS | L1C | 16–22 | 15–22 |
| L1P | 16–22 | 15–22 | |
| L2C | 15–22 | 15–22 | |
| L2P | 15–22 | 16–22 | |
| Galileo | L1X | 15–22 | 15–22 |
| L5X | 15–21 | 15–22 | |
| SBAS | L1X | 13–20 | 15–20 |
| System | Signal | Observed Deviation Frequencies, Hz | |
|---|---|---|---|
| Quiet Conditions (2 September 2022) | Magnetic Storm (4 September 2022) | ||
| GPS | L1C | 18–40 | 23–44 |
| L2C | 18–40 | 23–47 | |
| L5Q | 18–41 | 25–42 | |
| GLONASS | L1C | 18–40 | 22–43 |
| L2C | 18–40 | 22–43 | |
| GALILEO | L1C | 19–40 | 25–48 |
| L6C | 18–40 | 23–46 | |
| L7Q | 19–41 | 24–45 | |
| L8Q | 18–41 | 25–45 | |
| L5Q | 19–40 | 23–48 | |
| SBAS | L1C | 18–40 | 20–41 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demyanov, V.; Danilchuk, E.; Sergeeva, M.; Yasyukevich, Y. An Increase of GNSS Data Time Rate and Analysis of the Carrier Phase Spectrum. Remote Sens. 2023, 15, 792. https://doi.org/10.3390/rs15030792
Demyanov V, Danilchuk E, Sergeeva M, Yasyukevich Y. An Increase of GNSS Data Time Rate and Analysis of the Carrier Phase Spectrum. Remote Sensing. 2023; 15(3):792. https://doi.org/10.3390/rs15030792
Chicago/Turabian StyleDemyanov, Vladislav, Ekaterina Danilchuk, Maria Sergeeva, and Yury Yasyukevich. 2023. "An Increase of GNSS Data Time Rate and Analysis of the Carrier Phase Spectrum" Remote Sensing 15, no. 3: 792. https://doi.org/10.3390/rs15030792