

Refining the Resolution of DUACS Along-Track Level-3 Sea Level Altimetry Products

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Data Processing
2.1. DUACS Processing Overview
2.2. Altimeter Standards
2.2.1. Innovative Processing for Sentinel-3 SAR and Jason LRM
2.2.2. High-Frequency Adjustment (HFA) and Sea-State Bias (SSB) Correction for Measurement Noise Reduction
2.2.3. Up-to-Date Tide Corrections
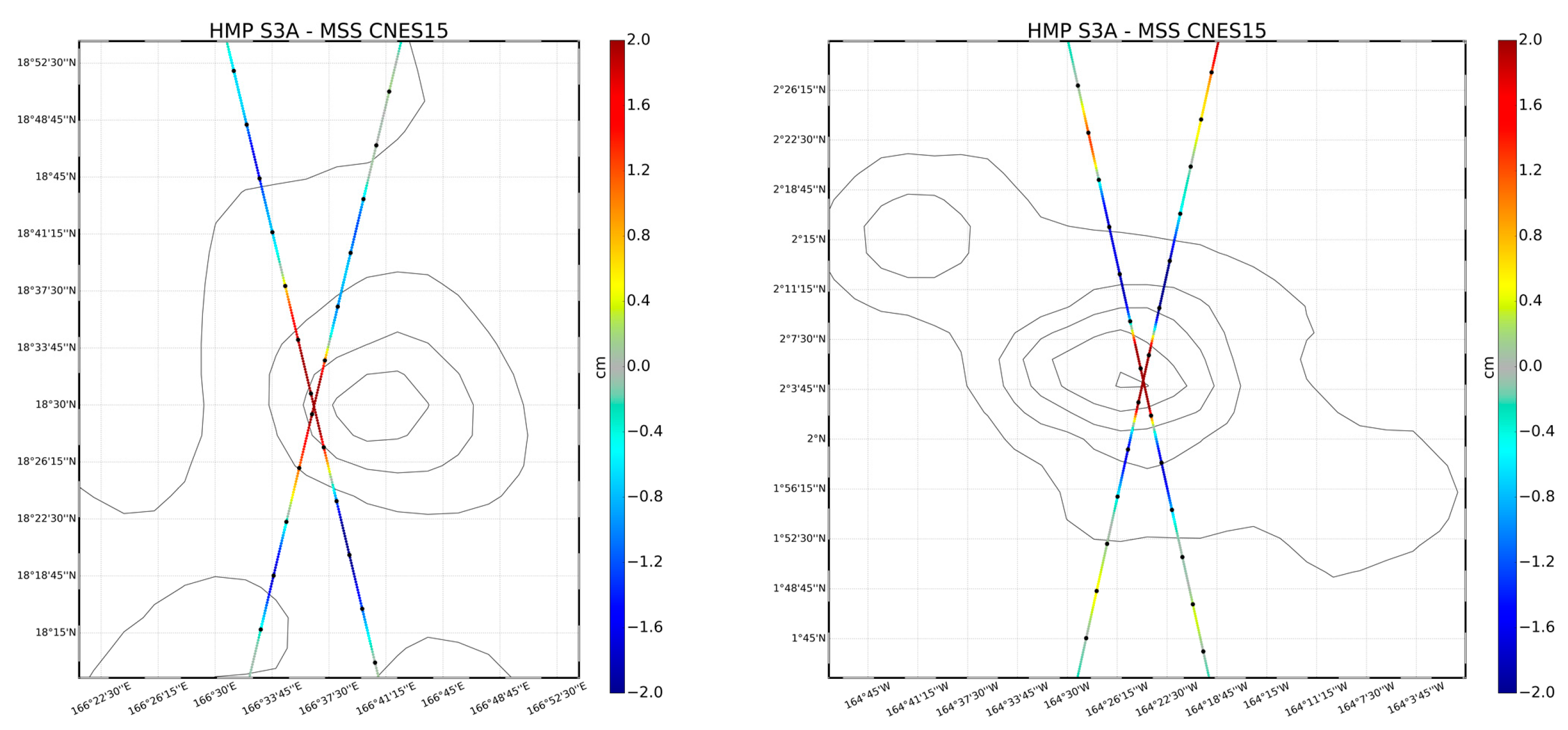
2.2.4. Mean Sea Surface Model
2.3. Valid Data Selection
2.3.1. Ice-Contaminated Data Detection
2.3.2. Open Ocean Data Selection
2.4. Short Wavelengths Noise Filtering and Signal Subsampling
2.5. Long-Wavelength Error Correction
2.6. Across-Track Current Estimation
3. Data Validation
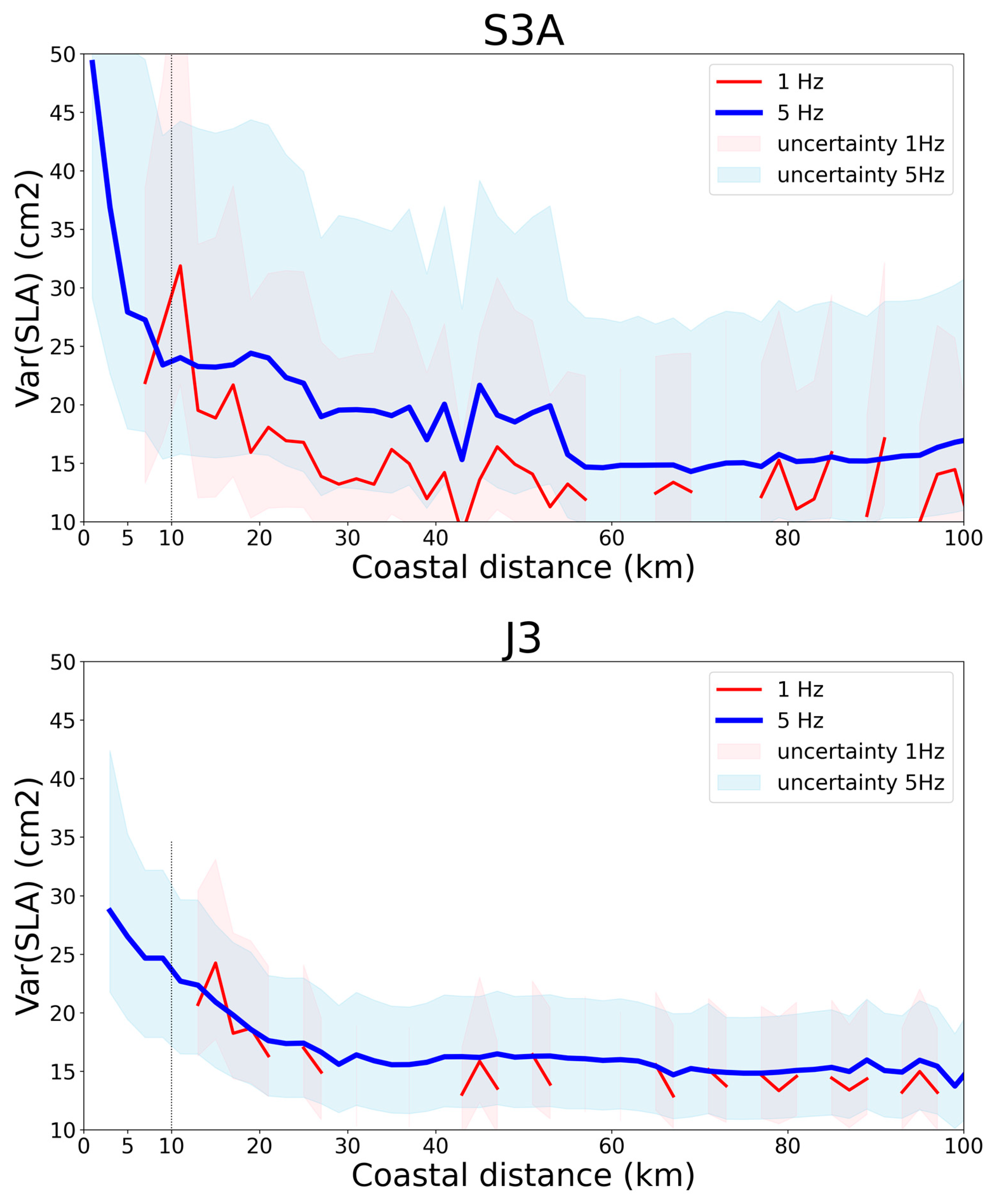
3.1. Data Availability and Gain Brought by the 5 Hz Altimeter Processing near the Coast
3.2. Observing Capability
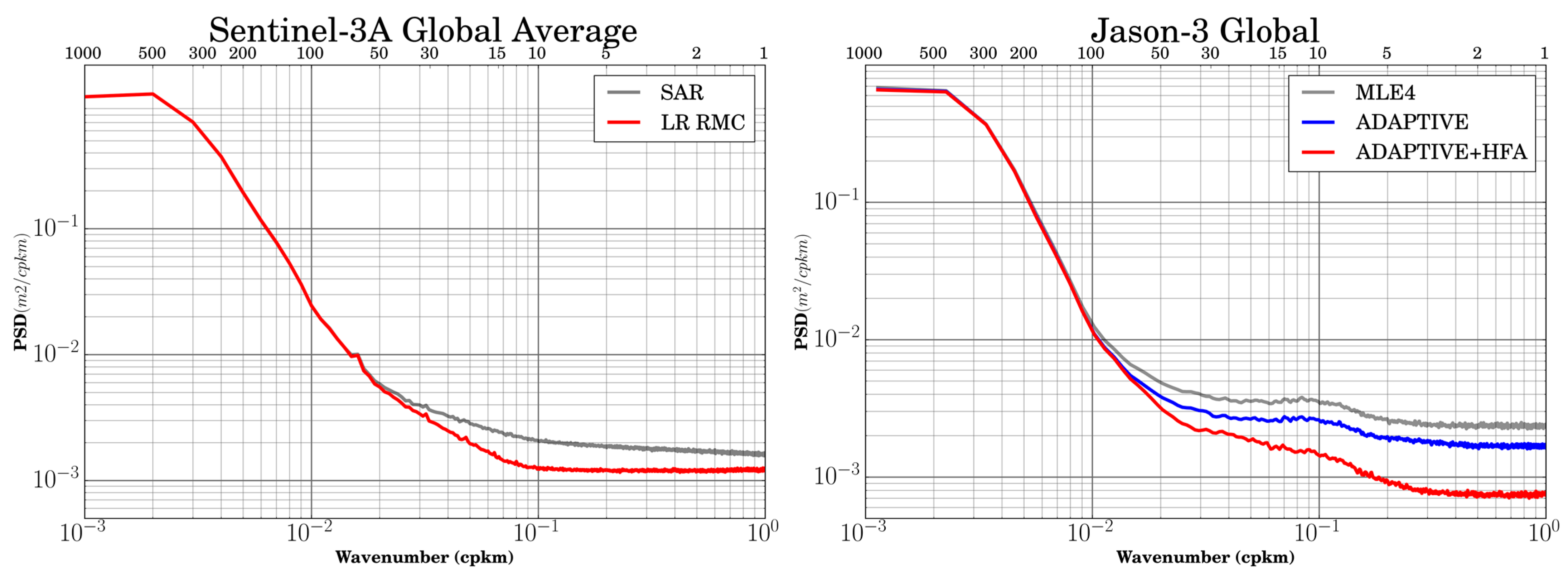
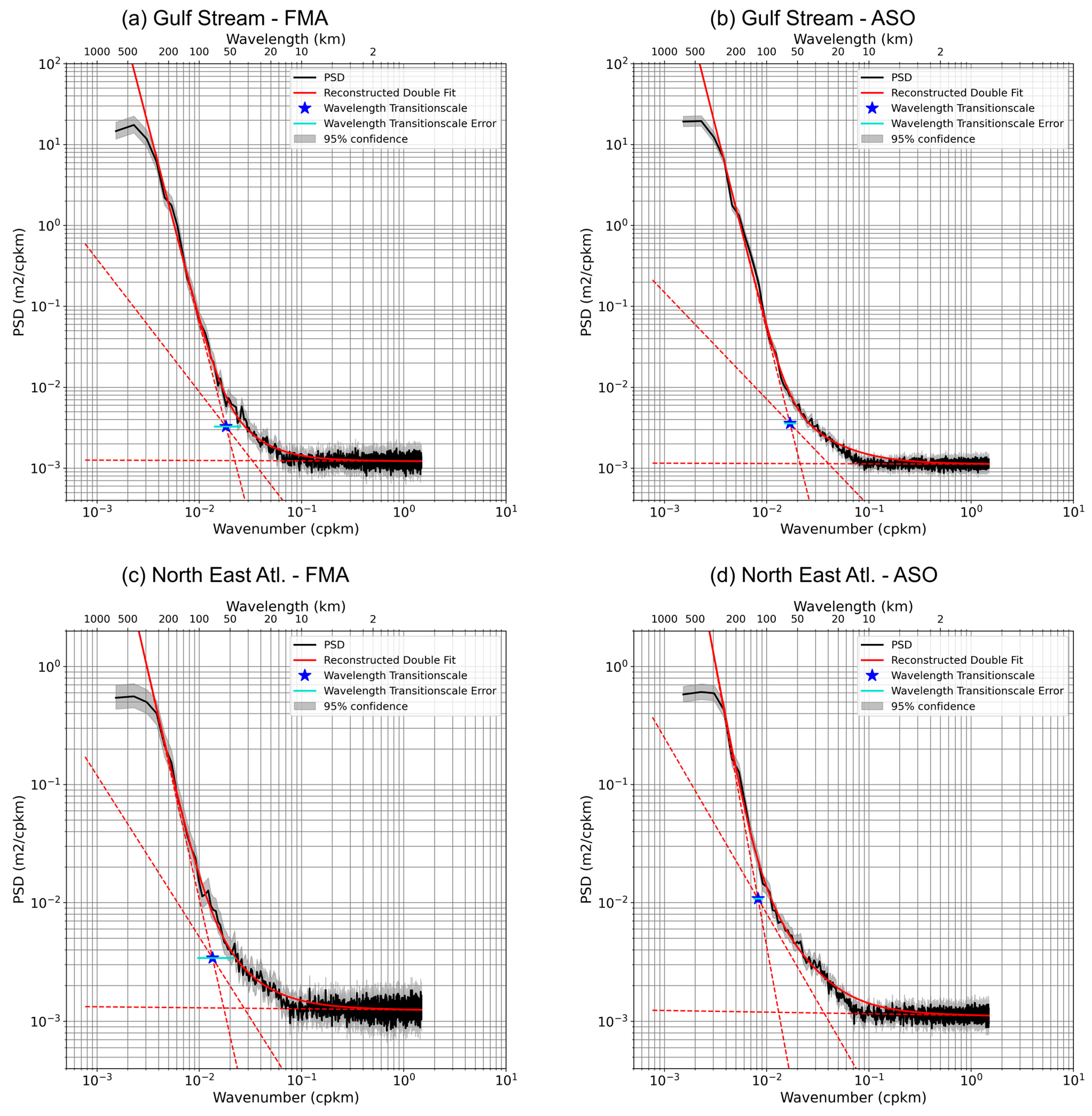
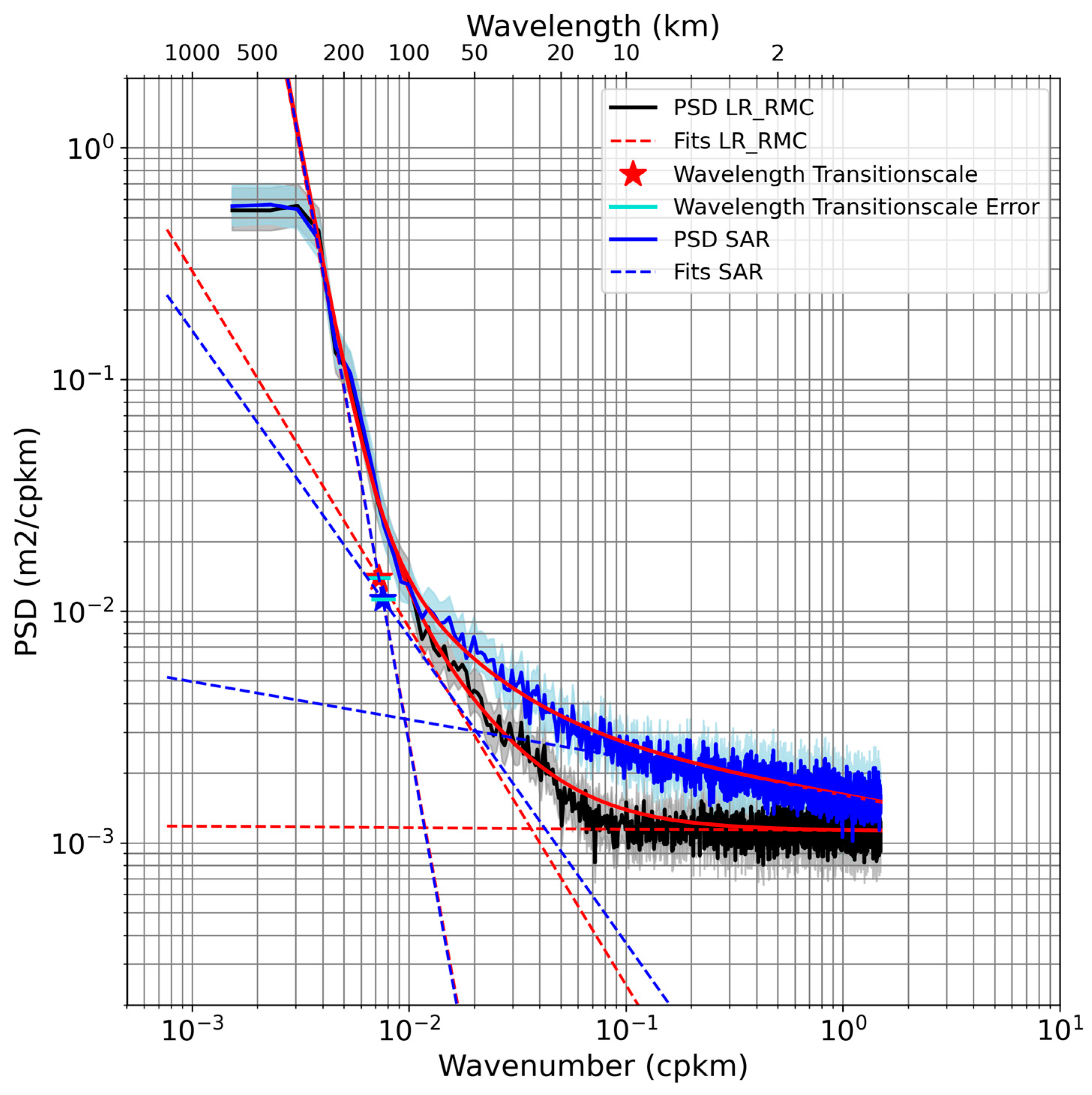
3.3. New Insight into the Altimeter Spectral Content with Sentinel-3A
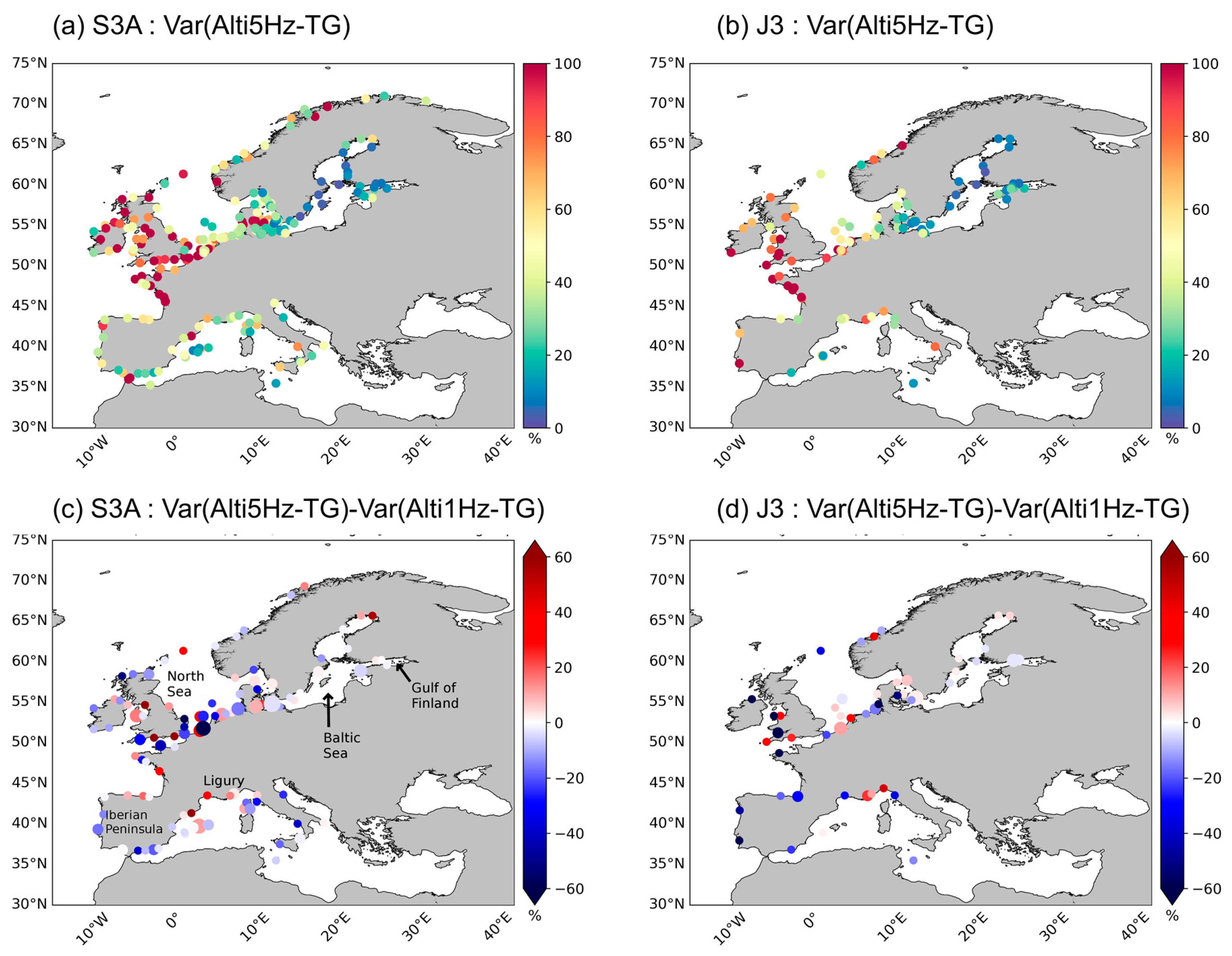
3.4. Consistency with TG
4. Use Cases
4.1. Assimilation in Numerical Models
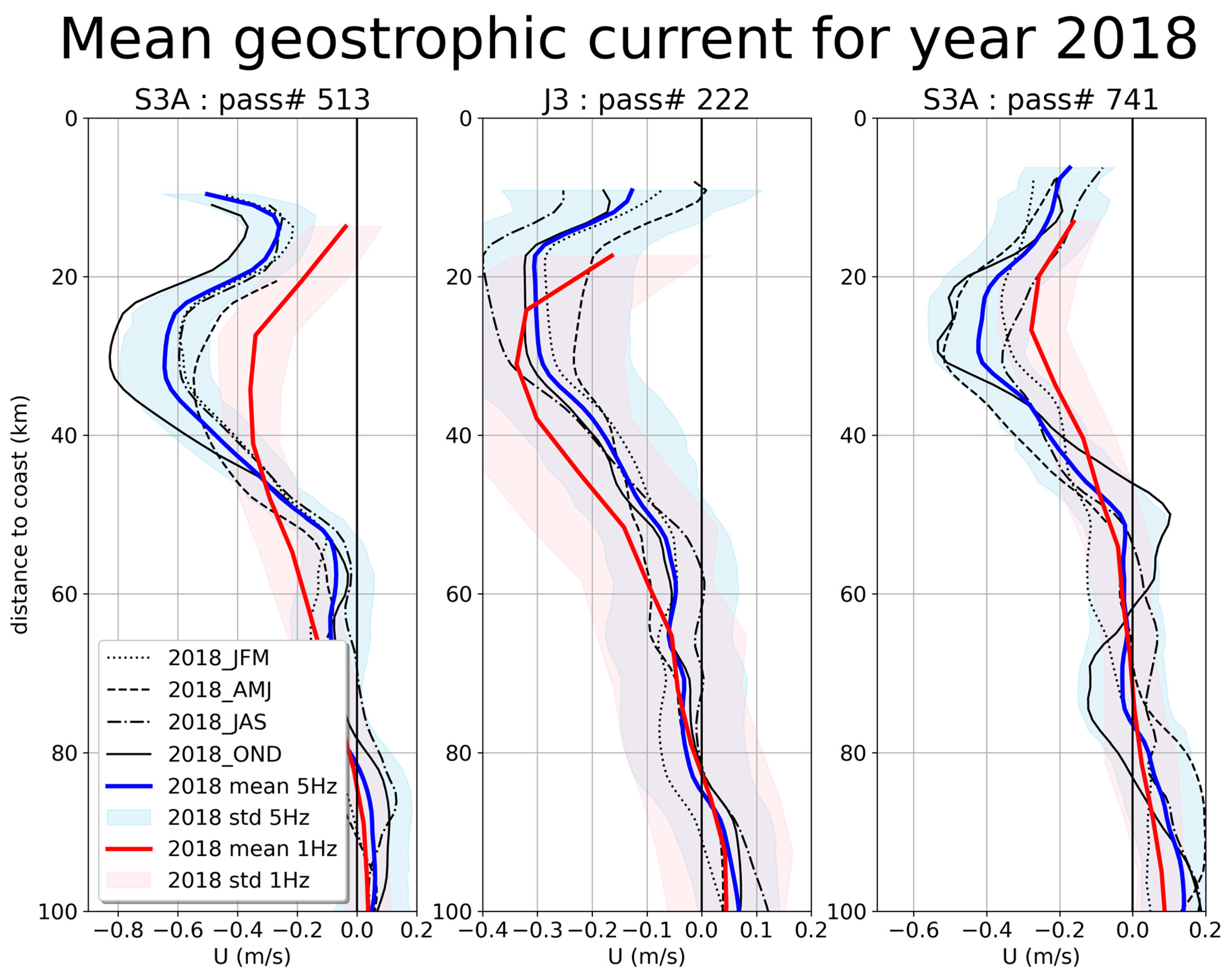
4.2. Coastal Currents
5. Summary and Perspectives
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Le Traon, P.Y.; Nadal, F.; Ducet, N. An Improved Mapping Method of Multisatellite Altimeter Data. J. Atmos. Ocean. Technol. 1998, 15, 522–534. [Google Scholar] [CrossRef]
- Ducet, N.; Le Traon, P.-Y.; Reverdin, G. Global high-resolution mapping of ocean circulation from TOPEX/Poseidon and ERS-1 and -2. J. Geophys. Res. Oceans 2000, 105, 19477–19498. [Google Scholar] [CrossRef]
- Dibarboure, G.; Pujol, M.-I.; Briol, F.; Le Traon, P.-Y.; Larnicol, G.; Picot, N.; Mertz, F.; Ablain, M. Jason-2 in DUACS: Updated System Description, First Tandem Results and Impact on Processing and Products. Mar. Geod. 2011, 34, 214–241. [Google Scholar] [CrossRef] [Green Version]
- Pujol, M.-I.; Faugère, Y.; Taburet, G.; Dupuy, S.; Pelloquin, C.; Ablain, M.; Picot, N. DUACS DT2014: The new multi-mission altimeter data set reprocessed over 20 years. Ocean Sci. 2016, 12, 1067–1090. [Google Scholar] [CrossRef] [Green Version]
- Taburet, G.; Sanchez-Roman, A.; Ballarotta, M.; Pujol, M.-I.; Legeais, J.-F.; Fournier, F.; Faugere, Y.; Dibarboure, G. DUACS DT2018: 25 years of reprocessed sea level altimetry products. Ocean Sci. 2019, 15, 1207–1224. [Google Scholar] [CrossRef] [Green Version]
- Benveniste, J.; Cazenave, A.; Vignudelli, S.; Fenoglio-Marc, L.; Shah, R.; Almar, R.; Andersen, O.; Birol, F.; Bonnefond, P.; Bouffard, J.; et al. Requirements for a Coastal Hazards Observing System. Front. Mar. Sci. 2019, 6, 348. [Google Scholar] [CrossRef] [Green Version]
- Dufau, C.; Martin-Puig, C.; Moreno, L. User Requirements in the Coastal Ocean for Satellite Altimetry. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 51–60. [Google Scholar] [CrossRef]
- Mercator Ocean CMEMS Partners, CMEMS Requirements for the Evolution of the Copernicus Satellite Component. 2017. Available online: https://marine.copernicus.eu/sites/default/files/media/pdf/2020-10/CMEMS-requirements-satellites.pdf (accessed on 19 December 2022).
- SWOT NASA/JPL Project, Surface Water and Ocean Topography Mission (SWOT§) Project Science Requirements Document. 2018. Available online: https://swot.jpl.nasa.gov/system/documents/files/2176_2176_D-61923_SRD_Rev_B_20181113.pdf (accessed on 19 December 2022).
- Ferrari, R.; Wunsch, C. Ocean Circulation Kinetic Energy: Reservoirs, Sources, and Sinks. Annu. Rev. Fluid Mech. 2008, 41, 253–282. [Google Scholar] [CrossRef] [Green Version]
- Rocha, C.B.; Chereskin, T.K.; Gille, S.T.; Menemenlis, D. Mesoscale to Submesoscale Wavenumber Spectra in Drake Passage. J. Phys. Oceanogr. 2016, 46, 601–620. [Google Scholar] [CrossRef]
- Capet, X.; McWilliams, J.C.; Molemaker, M.J.; Shchepetkin, A.F. Mesoscale to Submesoscale Transition in the California Current System. Part III: Energy Balance and Flux. J. Phys. Oceanogr. 2008, 38, 2256–2269. [Google Scholar] [CrossRef]
- Klein, P.; Hua, B.L.; Lapeyre, G.; Capet, X.; Le Gentil, S.; Sasaki, H. Upper Ocean Turbulence from High-Resolution 3D Simulations. J. Phys. Oceanogr. 2008, 38, 1748–1763. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Wang, J.; Klein, P.; Thompson, A.F.; Menemenlis, D. Ocean submesoscales as a key component of the global heat budget. Nat. Commun. 2018, 9, 775. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dibarboure, G.; Boy, F.; Desjonqueres, J.D.; Labroue, S.; Lasne, Y.; Picot, N.; Poisson, J.C.; Thibaut, P. Investigating Short-Wavelength Correlated Errors on Low-Resolution Mode Altimetry. J. Atmos. Ocean. Technol. 2014, 31, 1337–1362. [Google Scholar] [CrossRef] [Green Version]
- Vignudelli, S.; Kostianoy, A.; Cipollini; Benveniste, J. (Eds.) Coastal Altimetry; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef] [Green Version]
- Carrère, L.; Lyard, F. Modeling the barotropic response of the global ocean to atmospheric wind and pressure forcing-comparisons with observations. Geophys. Res. Lett. 2003, 30, 8. [Google Scholar] [CrossRef] [Green Version]
- Lyard, F.H.; Allain, D.J.; Cancet, M.; Carrère, L.; Picot, N. FES2014 global ocean tide atlas: Design and performance. Ocean Sci. 2021, 17, 615–649. [Google Scholar] [CrossRef]
- Zaron, E.D. Baroclinic Tidal Sea Level from Exact-Repeat Mission Altimetry. J. Phys. Oceanogr. 2019, 49, 193–210. [Google Scholar] [CrossRef]
- Fernandes, M.J.; Lázaro, C. GPD+ Wet Tropospheric Corrections for CryoSat-2 and GFO Altimetry Missions. Remote Sens. 2016, 8, 851. [Google Scholar] [CrossRef] [Green Version]
- Obligis, E.; Desportes, C.; Eymard, L.; Fernandes, M.J.; Lázaro, C.; Nunes, A.L. Tropospheric Corrections for Coastal Altimetry. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 147–176. [Google Scholar] [CrossRef]
- Dibarboure, G.; Pujol, M.-I. Improving the quality of Sentinel-3A data with a hybrid mean sea surface model, and implications for Sentinel-3B and SWOT. Adv. Space Res. 2021, 68, 1116–1139. [Google Scholar] [CrossRef]
- Sandwell, D.; Schaeffer; Dibarboure, G.; Picot, N. High Resolution Mean Sea Surface for SWOT, 2017. 2022. Available online: https://express.adobe.com/page/MkjujdFYVbHsZ/ (accessed on 19 December 2022).
- Verron, J.; Bonnefond, P.; Aouf, L.; Birol, F.; Bhowmick, S.A.; Calmant, S.; Conchy, T.; Crétaux, J.-F.; Dibarboure, G.; Dubey, A.K.; et al. The Benefits of the Ka-Band as Evidenced from the SARAL/AltiKa Altimetric Mission: Scientific Applications. Remote Sens. 2018, 10, 163. [Google Scholar] [CrossRef] [Green Version]
- Pujol, M.I.; Dupuy, S.; Vergara, O.; Sánchez-Román, A.; Faugère, Y.; Prandi, P.; Dabat, M.L.; Dagneaux, Q.; Lievin, M.; Cadier, E.; et al. CP40—Cryosat Plus for Oceans: CP40 ESA Contract 4000106169/12/I-NB; European Space Agency: Paris, France, 2015; p. 65. [Google Scholar]
- Raynal, M.; Labroue, S.; Moreau, T.; Boy, F.; Picot, N. From conventional to Delay Doppler altimetry: A demonstration of continuity and improvements with the Cryosat-2 mission. Adv. Space Res. 2018, 62, 1564–1575. [Google Scholar] [CrossRef]
- Boy, F.; Moreau, T.; Thibaut, P.; Rieu, P.; Aublanc, J.; Picot, N.; Féménias, P.; Mavrocordatos, C. New Stacking Method for Removing the SAR Sensitivity to Swell; Présenté à OSTST: Miami, FL, USA, 2017; Available online: https://ostst.aviso.altimetry.fr/fileadmin/user_upload/IPM_04__New_Stacking_Process_Boy_OSTST2017.pdf (accessed on 19 December 2022).
- Egido, A.; Smith, W.H.F. Fully Focused SAR Altimetry: Theory and Applications. IEEE Trans. Geosci. Remote Sens. 2016, 55, 392–406. [Google Scholar] [CrossRef]
- Moreau, T.; Cadier, E.; Boy, F.; Aublanc, J.; Rieu, P.; Raynal, M.; Labroue, S.; Thibaut, P.; Dibarboure, G.; Picot, N.; et al. High-performance altimeter Doppler processing for measuring sea level height under varying sea state conditions. Adv. Space Res. 2021, 67, 1870–1886. [Google Scholar] [CrossRef]
- Gommenginger, C.; Thibaut, P.; Fenodlio-Marc, L.; Quartly, G.; Deng, X.; Gomez-Enri, J.; Challenor, P.; Gao, Y. Retracking Altimeter Waveforms Near the Coasts. In Coastal Altimetry; Vignudelli, S., Kostianoy, A.G., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 61–102. [Google Scholar]
- Passaro, M.; Cipollini, P.; Vignudelli, S.; Quartly, G.D.; Snaith, H.M. ALES: A multi-mission adaptive subwaveform retracker for coastal and open ocean altimetry. Romote Sens. Environ. 2014, 145, 173–189. [Google Scholar] [CrossRef] [Green Version]
- Sandwell, D.; Smith, W.H.F. Retracking ERS-1 altimeter waveforms for optimal gravity field recovery. Geophys. J. Int. 2005, 163, 79–89. [Google Scholar] [CrossRef] [Green Version]
- Thibaut, P.; Piras, F.; Poisson, J.C.; Moreau, T.; Halimi, A.; Boy, F.; Guillot, A.; Le Gac, S.; Picot, N. Convergent Solutions for Retracking Conventional and Delay Doppler Altimeter Echoes; Présenté à OSTST: Miami, FL, USA, 2017; Available online: https://ostst.aviso.altimetry.fr/fileadmin/user_upload/IPM_06_Thibaut_LRM_SAR_Retrackers_-_16.9.pdf (accessed on 19 December 2022).
- Passaro, M.; Nadzir, Z.; Quartly, G. Improving the precision of sea level data from satellite altimetry with high-frequency and regional sea state bias corrections. Remote Sens. Environ. 2018, 218, 245–254. [Google Scholar] [CrossRef] [Green Version]
- Tran, N.; Vandemark, D.; Zaron, E.; Thibaut; Dibarboure, G.; Picot, N. Assessing the effects of sea-state related errors on the precision of high-rate Jason-3 altimeter sea level data. Adv. Space Res. 2021, 68, 963–977. [Google Scholar] [CrossRef]
- Quartly, G.; Smith, W.; Passaro, M. Removing Intra-1-Hz Covariant Error to Improve Altimetric Profiles of σ0 and Sea Surface Height. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3741–3752. [Google Scholar] [CrossRef]
- Quilfen, Y.; Chapron, B. On denoising satellite altimeter measurements for high-resolution geophysical signal analysis. Adv. Space Res. 2021, 68, 875–891. [Google Scholar] [CrossRef]
- Zaron, E.; de Carvalho, R. Identification and Reduction of Retracker-Related Noise in Altimeter-Derived Sea Surface Height Measurements. J. Atmos. Ocean. Technol. 2016, 33, 201–210. [Google Scholar] [CrossRef] [Green Version]
- Mercier, F.; Rosmorduc, V.; Carrere, L.; Thibaut, P. Coastal and Hydrology Altimetry Product (PISTACH) Handbook. 2010. Available online: https://www.aviso.altimetry.fr/fileadmin/documents/data/tools/hdbk_Pistach.pdf (accessed on 19 December 2022).
- Birol, F.; Fuller, N.; Lyard, F.; Cancet, M.; Niño, F.; Delebecque, C.; Fleury, S.; Toublanc, F.; Melet, A.; Saraceno, M.; et al. Coastal applications from nadir altimetry: Example of the X-TRACK regional products. Adv. Space Res. 2017, 59, 936–953. [Google Scholar] [CrossRef]
- Roblou, L.; Lamouroux, J.; Bouffard, J.; Lyard, F.; Le Hénaff, M.; Lombard, A.; Marsaleix, P.; De Mey, P.; Birol, F. Post-processing altimeter data towards coastal applications and integration into coastal models. In Coastal Altimetry; Vignudelli, S., Kostianoy, A., Cipollini, P., Benveniste, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 217–246. [Google Scholar] [CrossRef]
- Birol, F.; Léger, F.; Passaro, M.; Cazenave, A.; Niño, F.; Calafat, F.M.; Shaw, A.; Legeais, J.-F.; Gouzenes, Y.; Schwatke, C.; et al. The X-TRACK/ALES multi-mission processing system: New advances in altimetry towards the coast. Adv. Space Res. 2021, 67, 2398–2415. [Google Scholar] [CrossRef]
- Grégoire, M.; EO4SIBS Consortium (ESA Project). Earth Observation Products for Science and Innovation in the Black Sea, Présenté à EGU21, Gather Online, 2021. Available online: https://meetingorganizer.copernicus.org/EGU21/EGU21-10237.html (accessed on 19 December 2022).
- Auger, M.; Prandi, P.; Sallée, J.-B. Southern ocean sea level anomaly in the sea ice-covered sector from multimission satellite observations. Sci. Data 2022, 9, 70. [Google Scholar] [CrossRef] [PubMed]
- Prandi, A.; Poisson, J.-C.; Faugère, Y.; Guillot, A.; Dibarboure, G. Arctic sea surface height maps from multi-altimeter combination. Earth Syst. Sci. Data 2021, 13, 5469–5482. [Google Scholar] [CrossRef]
- Thibaut, P.; Piras, F.; Roinard, H.; Guerou, A.; Boy, F.; Maraldi, C.; Bignalet-Cazalet, F.; Dibarboure, G.; Picot, N. Benefits of the adaptive retracking solution for the Jason-3 GDR-F reprocessing campaign. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; Available online: https://igarss2021.com/view_paper.php?PaperNum=4121 (accessed on 19 December 2022).
- Poisson, J.-C.; Quartly, G.D.; Kurekin, A.A.; Thibaut, P.; Hoang, D.; Nencioli, F. Development of an ENVISAT Altimetry Processor Providing Sea Level Continuity Between Open Ocean and Arctic Leads. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5299–5319. [Google Scholar] [CrossRef]
- Tran, N.; (Collecte Localisation Satellites, Ramonville Saint Agne, France); Figerou, S.; (Collecte Localisation Satellites, Ramonville Saint Agne, France). Personal communication, 2022.
- Tran, N.; Philipps, S.; Poisson, J.-C.; Urien, S.; Bronner, E.; Picot, N. Impact of GDR_D Standards on SSB Corrections; Présenté à OSTST: Venice, Italy, 2012; Available online: http://www.aviso.altimetry.fr/fileadmin/documents/OSTST/2012/oral/02_friday_28/01_instr_processing_I/01_IP1_Tran.pdf (accessed on 19 December 2022).
- Iijima, B.; Harris, I.; Ho, C.; Lindqwister, U.; Mannucci, A.; Pi, X.; Reyes, M.; Sparks, L.; Wilson, B. Automated daily process for global ionospheric total electron content maps and satellite ocean altimeter ionospheric calibration based on Global Positioning System data. J. Atmos. Sol.-Terr. Phys. 1999, 61, 1205–1218. [Google Scholar] [CrossRef]
- Carrere, L.; Lyard, F.; Cancet, M.; Allain, D.; Guillot, A.; Picot, N. Final Version of the FES2014 Global Ocean Tidal Model, Which Includes a New Loading Tide Solution; Présenté à OSTST: La Rochelle, France, 2016; Available online: https://ostst.aviso.altimetry.fr/fileadmin/user_upload/tx_ausyclsseminar/files/Poster_FES2014b_OSTST_2016.pdf (accessed on 19 December 2022).
- Cartwright, D.; Tayler, R. New Computations of the Tide-generating Potential. Geophys. J. Int. 1971, 23, 45–73. [Google Scholar] [CrossRef] [Green Version]
- Cartwright, D.E.; Edden, A.C. Corrected Tables of Tidal Harmonics. Geophys. J. Int. 1973, 33, 253–264. [Google Scholar] [CrossRef]
- Desai, S.; Wahr, J.; Beckley, B. Revisiting the pole tide for and from satellite altimetry. J. Geod. 2015, 89, 1233–1243. [Google Scholar] [CrossRef]
- Schaeffer, P.; Faugere, Y.; Guillot, A.; Picot, N. The CNES CLS 2015 Global Mean Sea Surface; Présenté à OSTST: La Rochelle, France, 2016; p. 14. Available online: https://ostst.aviso.altimetry.fr/fileadmin/user_upload/tx_ausyclsseminar/files/GEO_03_Pres_OSTST2016_MSS_CNES_CLS2015_V1_16h55.pdf (accessed on 19 December 2022).
- Pujol, M.I.; Schaeffer, P.; Faugère, Y.; Raynal, M.; Dibarboure, G.; Picot, N. Gauging the Improvement of Recent Mean Sea Surface Models: A New Approach for Identifying and Quantifying Their Errors. J. Geophys. Res. Ocean. 2018, 123, 5889–5911. [Google Scholar] [CrossRef]
- Mulet, S.; Rio, M.-H.; Etienne, H.; Artana, C.; Cancet, M.; Dibarboure, G.; Feng, H.; Husson, R.; Picot, N.; Provost, C.; et al. The new CNES-CLS18 global mean dynamic topography. Ocean Sci. 2021, 17, 789–808. [Google Scholar] [CrossRef]
- Rio, M.-H.; Pascual, A.; Poulain, P.-M.; Menna, M.; Barceló, B.; Tintoré, J. Computation of a new mean dynamic topography for the Mediterranean Sea from model outputs, altimeter measurements and oceanographic in situ data. Ocean Sci. 2014, 10, 731–744. [Google Scholar] [CrossRef] [Green Version]
- Rieu, P.; Moreau, T.; Cadier, E.; Raynal, M.; Clerc, S.; Donlon, C.; Borde, F.; Boy, F.; Maraldi, C. Exploiting the Sentinel-3 tandem phase dataset and azimuth oversampling to better characterize the sensitivity of SAR altimeter sea surface height to long ocean waves. Adv. Space Res. 2021, 67, 253–265. [Google Scholar] [CrossRef]
- Amarouche, L.; Thibaut, P.; Zanife, O.Z.; Dumont, J.-P.; Vincent, P.; Steunou, N. Improving the Jason-1 Ground Retracking to Better Account for Attitude Effects. Mar. Geod. 2004, 27, 171–197. [Google Scholar] [CrossRef]
- Thibaut, P.; Poisson, J.C.; Bronner, E.; Picot, N. Relative Performance of the MLE3 and MLE4 Retracking Algorithms on Jason-2 Altimeter Waveforms. Mar. Geod. 2010, 33 (Suppl. S1), 317–335. [Google Scholar] [CrossRef]
- Tourain, C.; Piras, F.; Ollivier, A.; Hauser, D.; Poisson, J.C.; Boy, F.; Thibaut, P.; Hermozo, L.; Tison, C. Benefits of the Adaptive Algorithm for Retracking Altimeter Nadir Echoes: Results From Simulations and CFOSAT/SWIM Observations. IEEE Trans. Geosci. Remote Sens. 2021, 59, 9927–9940. [Google Scholar] [CrossRef]
- Dufau, C.; Orsztynowicz, M.; Dibarboure, G.; Morrow, R.; Le Traon, P.-Y. Mesoscale resolution capability of altimetry: Present and future. J. Geophys. Res. Oceans 2016, 121, 4910–4927. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Fu, L.-L. The Effects of Altimeter Instrument Noise on the Estimation of the Wavenumber Spectrum of Sea Surface Height. J. Phys. Oceanogr. 2012, 42, 2229–2233. [Google Scholar] [CrossRef]
- Roinard, H.; Michaud, L. Annual Report 2019: Jason-3 Validation and Cross Calibration Activities; CNES: Paris, France, 2019; Available online: https://www.aviso.altimetry.fr/fileadmin/documents/calval/validation_report/J3/SALP-RP-MA-EA-23399-CLS_Jason-3_AnnualReport2019_v1-1.pdf (accessed on 19 December 2022).
- Lavergne, T.; Sørensen, A.M.; Kern, S.; Tonboe, R.; Notz, D.; Aaboe, S.; Bell, L.; Dybkjær, G.; Eastwood, S.; Gabarro, C.; et al. Version 2 of the EUMETSAT OSI SAF and ESA CCI sea-ice concentration climate data records. Cryosphere 2019, 13, 49–78. [Google Scholar] [CrossRef] [Green Version]
- Raney, R. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Gregoire, M.; Alvera-Azcarate, A.; Buga, L.; Capet, A.; Constantin, S.; D’Ortenzio, F.; Doxaran, D.; Faugere, Y.; Garcia-Espriu, A.; Golumbeanu, M.; et al. Monitoring Black Sea environmental changes from space. Earth Syst. Sci. Data 2022, 9, 2862. [Google Scholar]
- Sasaki, H.; Klein, P.; Qiu, B.; Sasai, Y. Impact of oceanic-scale interactions on the seasonal modulation of ocean dynamics by the atmosphere. Nat. Commun. 2014, 5, 5636. [Google Scholar] [CrossRef] [Green Version]
- Vergara, O.; Morrow, R.; Pujol, I.; Dibarboure, G.; Ubelmann, C. Revised Global Wave Number Spectra from Recent Altimeter Observations. J. Geophys. Res. Oceans 2019, 124, 3523–3537. [Google Scholar] [CrossRef]
- Qiu, B.; Chen, S.; Klein, P.; Wang, J.; Torres, H.; Fu, L.-L.; Menemenlis, D. Seasonality in Transition Scale from Balanced to Unbalanced Motions in the World Ocean. J. Phys. Oceanogr. 2018, 48, 591–605. [Google Scholar] [CrossRef] [Green Version]
- McWilliams, J.C. Submesoscale currents in the ocean. Proc. R. Soc. A Math. Phys. Eng. Sci. 2016, 472, 20160117. [Google Scholar] [CrossRef] [Green Version]
- Vergara, O.; Morrow, R.; Pujol, M.I.; Dibarboure, G.; Ubelmann, C. Ubelmann, Global submesoscale diagnosis using alongtrack satellite altimetry. EGUsphere 2022, 2022, 1–39. [Google Scholar] [CrossRef]
- Garrett, C.; Munk, W. Space-time scales of internal waves: A progress report. J. Geophys. Res. 1975, 80, 291–297. [Google Scholar] [CrossRef]
- Sánchez-Román, A.; Pascual, A.; Pujol, M.-I.; Taburet, G.; Marcos, M.; Faugère, Y. Assessment of DUACS Sentinel-3A Altimetry Data in the Coastal Band of the European Seas: Comparison with Tide Gauge Measurements. Remote Sens. 2020, 12, 3970. [Google Scholar] [CrossRef]
- Codiga, D. Unified Tidal Analysis and Prediction Using the Utide Matlab Functions; URI/GSO Technical Report 2011-01; University of Rhode Island: Kingston, RI, USA, 2011. [Google Scholar] [CrossRef]
- Peltier, W. Global Glacial Isostasy and the Surface of the Ice-Age Earth: The Ice-5g (Vm2) Model and Grace. Annu. Rev. Earth Planet. Sci. 2004, 32, 111–149. [Google Scholar] [CrossRef]
- Peltier, W.R. Postglacial variations in the level of the sea: Implications for climate dynamics and solid-Earth geophysics. Rev. Geophys. 1998, 36, 603–689. [Google Scholar] [CrossRef]
- Benkiran, M.; Remy, E.; Reffray, G. Impact of the Assimilation of High-Frequency Data in a Regional Model with High Resolution; Présenté à OSTST: Miami, FL, USA, 2017; Available online: https://ostst.aviso.altimetry.fr/programs/abstracts-details.html?tx_ausyclsseminar_pi2%5BobjAbstracte%5D=2264&cHash=2f51a0cad63bed9bfca610178667ffab (accessed on 19 December 2022).
- Copernicus Marine In Situ Tac. For Global Ocean-Delayed Mode In-Situ Observations of Surface (Drifters and HFR) and Sub-Surface (Vessel-Mounted ADCPs) Water Velocity. Quality Information Document (QUID), CMEMS-QUID-013-044; Mercator Ocean International: Toulouse, France, 2020. [Google Scholar] [CrossRef]
- Carret, A.; Birol, F.; Estournel, C.; Zakardjian, B.; Testor, P. Synergy between in situ and altimetry data to observe and study the NorthernCurrent variations (NW Mediterranean Sea), Remote Sensing/Current Field/All Depths/Mediterranean Sea. Ocean. Sci. 2018, 15, 269–290. [Google Scholar] [CrossRef] [Green Version]
- Poulain, P.; Gerin, R.; Rixen, M.; Zanasca, P.; Teixeira, J.; Griffa, A.; Molcard, A.; De Marte, M.; Pinardi, N. Aspects of the surface circulation in the Liguro-Provençal basin and Gulf of Lion as observed by satellite-tracked drifters (2007–2009). Boll. Geofis. Teor. Appl. 2012, 53, 261–279. [Google Scholar]
- Ourmières, Y.; Zakardjian, B.; Beranger, K.; Langlais, C. Assessment of a NEMO-based downscaling experiment for the North-Western Mediterranean region: Impacts on the Northern Current and comparison with ADCP data and altimetry products. Ocean Model. 2011, 39, 386–404. [Google Scholar] [CrossRef]
- Alberola, C.; Millot, C.; Font, J. On the seasonal and mesoscale variabilities of the Northern Current during the PRIMO-0 experiment in the western Mediterranean-sea. Oceanol. Acta 1995, 18, 163–192. [Google Scholar]
- Petrenko, A.; Dufau, C.; Estournel, C. Barotropic eastward currents in the western Gulf of Lion, north-western Mediterranean Sea, during stratified conditions. J. Mar. Syst. 2008, 74, 406–428. [Google Scholar] [CrossRef]
- La Violette, E. Seasonal and Interannual Variability of the Western Mediterranean Sea; American Geophysical Union: Washington, DC, USA, 1994. [Google Scholar]
- Guihou, K.; Marmain, J.; Ourmières, Y.; Molcard, A.; Zakardjian, B. Forget, A case study of the mesoscale dynamics in the North-Western Mediterranean Sea: A combined data-model approach. Ocean Dyn. 2013, 63, 793–808. [Google Scholar] [CrossRef]
- Millot, C. Mesoscale and seasonal variabilities of the circulation in the western Mediterranean. Dyn. Atmos. Ocean. 1991, 15, 179–214. [Google Scholar] [CrossRef]
- Sammari, C.; Millot, C.; Prieur, L. Aspects of the seasonal and mesoscale variabilities of the Northern Current in the western Mediterranean Sea inferred from the PROLIG-2 and PROS-6 experiments. Deep Sea Res. Part I Oceanogr. Res. Pap. 1995, 42, 893–917. [Google Scholar] [CrossRef]
- Fernendez, D.E.; Fu, L.-L.; Pollard, B.; Vaze; Abelson, R.; Steunou, N. SWOT Project: Mission Performance and Error Budget; Technical Note JPL D-79084; Jet Propulsion Laboratory: Pasadena, CA, USA, 2017. Available online: https://swot.jpl.nasa.gov/system/documents/files/2178_2178_SWOT_D-79084_v10Y_FINAL_REVA__06082017.pdf (accessed on 19 December 2022).
- Pujol, M.I.; Dupuy, S.; Vergara, O.; Sánchez-Román, A.; Faugère, Y.; Prandi, P.; Dabat, M.L.; Dagneaux, Q.; Lievin, M.; Cadier, E.; et al. High-resolution Level-3 altimeter DUACS experimental regional product (Version V02). Earth Syst. Sci. Data Discuss. 2020, 2020, 1–40. [Google Scholar] [CrossRef]
- North Atlantic and European Seas along Track High Resolution L 3 Sea Level Anomalies. Available online: https://data.marine.copernicus.eu/product/SEALEVEL_ATL_PHY_HR_L3_MY_008_064/description (accessed on 20 December 2022).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel-3A | OSTM/Jason-2 | Jason-3 | SARAL/AltiKa | Cryosat-2 | |
|---|---|---|---|---|---|
| Product standard ref | GDR-E | ||||
| Orbit | POE-E | ||||
| Range processing/retracking | LR-RMC (with LUT correction) [27,29] | Adaptive [46,47] | Adaptive [46,47] | LRM | SAR and LRM |
| Noise reduction | - | HFA adaptive [35] | HFA adaptive [35] | HFA [48] | HFA [48] (LRM) |
| Sea-State Bias | Non-parametric SSB [49] | 2D SSB [35] | 2D SSB [35] | Non-parametric SSB | Non-parametric SSB |
| Ionosphere | Dual-frequency altimeter range measurement | Dual-frequency altimeter range measurement | Dual-frequency altimeter range measurement | GIM [50] | |
| Wet troposphere | From S3A-AMR radiometer | From J3-AMR radiometer neural network correction (three entries) | From J3-AMR radiometer neural network correction (three entries) | Neural network correction (five entries) | From ECMWF model |
| Dry troposphere | Model based on ECMWF Gaussian grids | ||||
| Combined atmospheric correction | MOG2D High frequencies forced with analyzed ECMWF pressure and wind field [17] (operational version used, current version is 3.2.0) + inverse barometer low frequencies | ||||
| Ocean tide | FES2014b [51] | ||||
| Internal tide | M2,K1,O1,S2 [19] (HRET 7.0) | ||||
| Solid Earth tide | Elastic response to tidal potential [52,53] | ||||
| Pole tide | From [54]; Mean Pole Location 2017 | ||||
| MSS | HMP [22] | CNES-CLS-2015 [55,56] | |||
| MDT | CNES_CLS18 (including regional SMDT_MED_2014) [57,58] | ||||
| Sentinel-3A | OSTM/Jason-2 | Jason-3 | SARAL/AltiKa | Cryosat-2 |
|---|---|---|---|---|
| 35 (65) | 55 | 55 (85) | 40 | 40 |
| No LWE | LWE from DUACS 1 Hz Processing | LWE from DUACS 5 Hz Processing | |
|---|---|---|---|
| Jason-3/Jason-3 | 28.40 | 26.56 (−6.5%) | 24.06 (−15.3%) |
| Jason-3/Sentinel-3B | 28.71 | 27.25 (−5.1%) | 26.15 (−8.9%) |
| Mean (km) | Min (km) | Max (km) | Number of Points (Count) | |
|---|---|---|---|---|
| S3A 1 Hz | 10.55 | 0.55 | 19.96 | 478 |
| S3A 5 Hz | 4.63 | 0.03 | 19.93 | 641 |
| J3 1 Hz | 11.3 | 0.05 | 19.90 | 259 |
| J3 5 Hz | 5.8 | 0.05 | 19.63 | 335 |
| Gulf Steam [42, 66°W] [33, 45°N] | Northeast Atlantic [10, 34°W] [35, 47°N] | |||||
|---|---|---|---|---|---|---|
| Full Year | FMA | ASO | Full Year | FMA | ASO | |
| Mesoscale slope | −4.93 +/− 0.08 | −4.89 +/− 0.23 | −5.03 +/− 0.13 | −4.3 +/− 0.19 | −3.83 +/− 0.45 | −4.74 +/− 0.37 |
| Sub-mesoscale slope | −1.41 +/− 0.17 | −1.64 +/− 0.46 | −1.32 +/− 0.22 | −1.42 +/− 0.12 | −1.37 +/− 0.48 | −1.49 +/− 0.14 |
| Lt (km) | 53.61 +/− 7.36 | 54.76 +/− 23.29 | 59.07 +/− 11.19 | 98.16 +/− 21.24 | 74.06 +/− 55.94 | 121.35 +/− 38.38 |
| Noise (cm rms) | 4.16 | 4.27 | 4.09 | 4.18 | 4.33 | 4.11 |
| 1 Hz | 5 Hz | Improv 5 Hz | |
|---|---|---|---|
| Var TG (cm2) | 128 (10) | 134 (9) | - |
| Var ALT (cm2) | 112 (8) | 126 (8) | - |
| Var TG-ALT (cm2) | 61 (6) | 58 (5) | −5% |
| Distance TG (km) | 20 | 19 | −5% |
| Data pairs | 2962 | 3220 | +8.7% |
| 1 Hz | 5 Hz | Improv 5 Hz | |
|---|---|---|---|
| Var TG (cm2) | 157 (18) | 154 (16) | - |
| Var ALT (cm2) | 135 (14) | 131 (13) | - |
| Var TG-ALT (cm2) | 70 (11) | 58 (8) | −17% |
| Distance TG (km) | 21 | 20 | −5% |
| Data pairs | 1255 | 1327 | +5.7% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pujol, M.-I.; Dupuy, S.; Vergara, O.; Sánchez Román, A.; Faugère, Y.; Prandi, P.; Dabat, M.-L.; Dagneaux, Q.; Lievin, M.; Cadier, E.; et al. Refining the Resolution of DUACS Along-Track Level-3 Sea Level Altimetry Products. Remote Sens. 2023, 15, 793. https://doi.org/10.3390/rs15030793
Pujol M-I, Dupuy S, Vergara O, Sánchez Román A, Faugère Y, Prandi P, Dabat M-L, Dagneaux Q, Lievin M, Cadier E, et al. Refining the Resolution of DUACS Along-Track Level-3 Sea Level Altimetry Products. Remote Sensing. 2023; 15(3):793. https://doi.org/10.3390/rs15030793
Chicago/Turabian StylePujol, Marie-Isabelle, Stéphanie Dupuy, Oscar Vergara, Antonio Sánchez Román, Yannice Faugère, Pierre Prandi, Mei-Ling Dabat, Quentin Dagneaux, Marine Lievin, Emeline Cadier, and et al. 2023. "Refining the Resolution of DUACS Along-Track Level-3 Sea Level Altimetry Products" Remote Sensing 15, no. 3: 793. https://doi.org/10.3390/rs15030793